 Ben Bokser
Ben BokserOutput Backlash: ~0.13 degree
Gear Ratio: 7:1 (Can easily be modified to 3:1, 4:1, 5:1, 9:1, or 10:1).
Motor: Herlea X8318S or Turnigy 9235
See the Github page for instructions, BoM, and CAD.
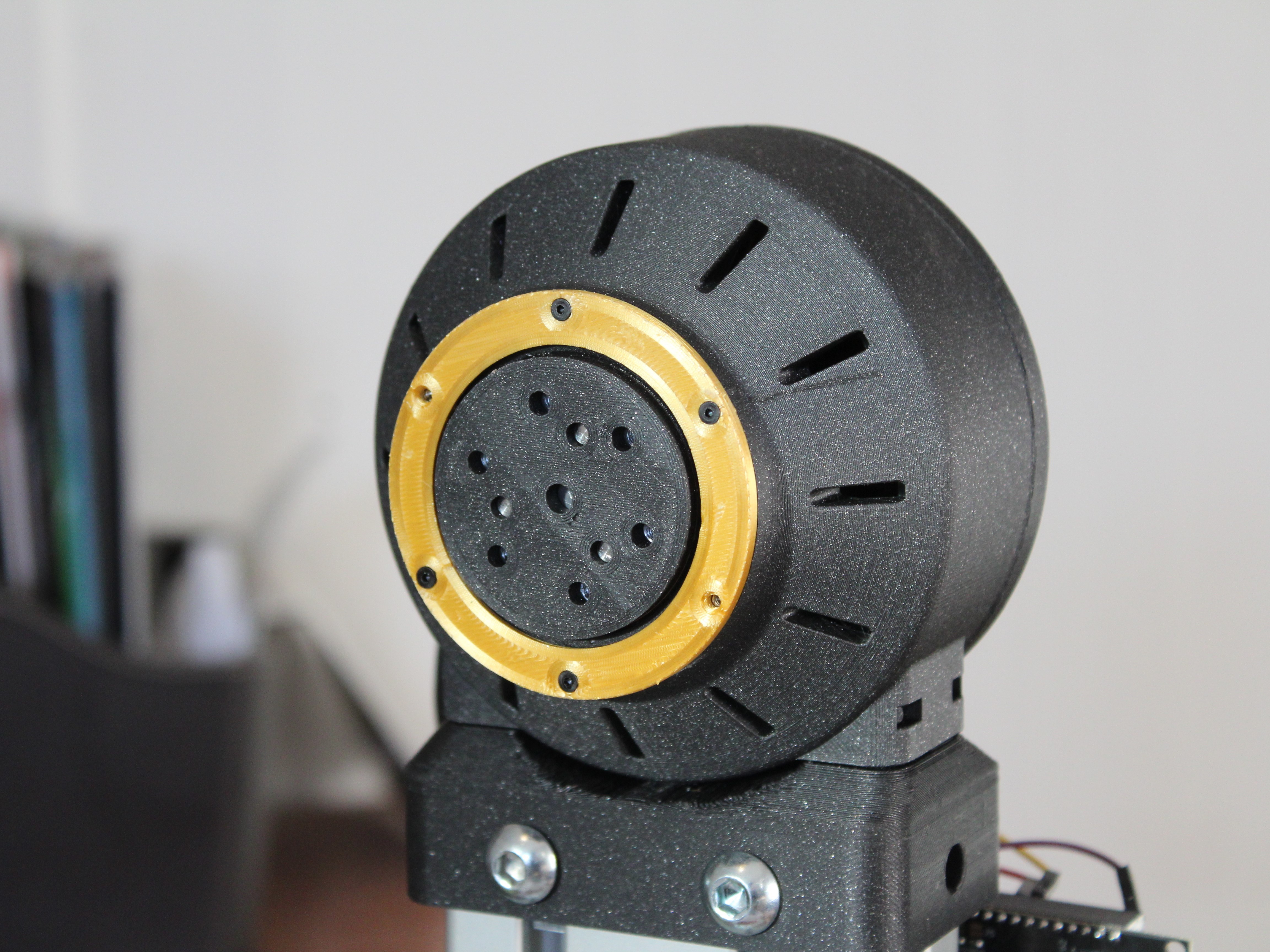
An affordable quasi-direct drive (QDD) actuator with steel gears.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Output Backlash: ~0.13 degree
Gear Ratio: 7:1 (Can easily be modified to 3:1, 4:1, 5:1, 9:1, or 10:1).
Motor: Herlea X8318S or Turnigy 9235
See the Github page for instructions, BoM, and CAD.
LaserCut.dxfAutoCAD DXF - 469.33 kB - 02/05/2020 at 04:49 |
|
|
SpryDrive BoM.xlsxsheet - 32.15 kB - 02/05/2020 at 04:49 |
|
|
README.mdmd - 3.81 kB - 02/05/2020 at 04:49 |
|
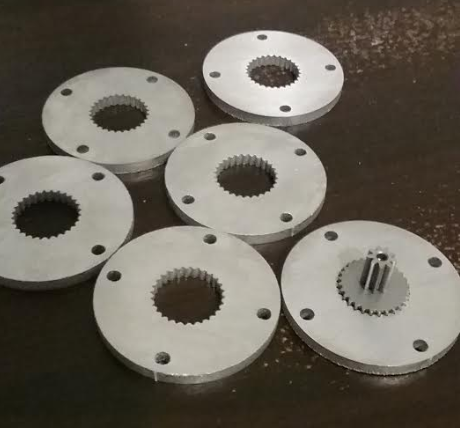
I'm now using aluminum adapters to transfer torque between the motor and sun gear as well as the carrier and output plate. This will allow the actuator to bear the stress of high-torque applications.
As far as custom metal parts go, these are dirt cheap. I purchased them from SendCutSend for a total of $29 with free shipping. I did have to tap the output plate adapters, though. Despite the low precision of laser cutting, concentricity tolerance isn't an issue as the sun gears are already mounted and centered on the 3 mm motor shaft tip. They also don't add backlash, as they're press fitted.
Also, vent holes for better cooling, especially if paired with a fan.
After finally getting around to running a few more tests (I've been busy with other life stuff), I'm now satisfied enough with the design to release it:
https://github.com/LocknutBushing/sprydrive
Instructions and BoM coming soon. Please critique!
In this video, I tested for 33 Nm, but theoretically the motor should be able to go much higher.
I also tested backlash. Should be roughly 0.13 degrees, or about 8 arcminutes.
New and improved design. This iteration is 3 mm shorter than the previous.
I'm still getting some slight, unbalanced stiction when playing with the mechanism by hand, until it's connected to the motor. Once it's all fastened together the motion feels perfectly smooth, which is odd to me. My only guess is that the bearing support the motor provides to the sun gear is enough to fix whatever axial misalignment there is, so it's a non-issue...?
First test of the actuator. It was a bit wobbly; I had to adjust some tolerances afterwards.


Thank you for the Like!
I actually thought long and hard about using this particular motor to direct drive an 8in mountain board wheel. In the end the efficiency gains of using a low ratio (3:1) planetary basically steered me away to the point of never trying it.
If you ever want to do some serious gear reduction in a small space check out #MPRT - Modified planetary robotics transmission .
Your current take on this is really good like it is though, especially if you want to do fast motion or joints that can be back driven for robotics.
Cheers.
Very nice actuator, I don't hear any noise from the motor, can you share the odrive parameters, like resistance, inductance and so on?

Thanks. The 8318 and 9325 motors are both rated for 0.055 ohms. Not sure about the inductance, though. https://hobbyking.com/en_us/9235-100kv-turnigy-multistar-brushless-multi-rotor-motor.html

Do you know the approximate weight of the completed actuator?

I love what you are doing here. I am making a brushless axial flux motor where the goal is minimal thickness and a high power to weight ratio. I think it might have a use in robotics, but I have thought of a thin gear reduction as a way to turn it into a hub motor too. Excited to see where this goes, and may incline me to pursue robotics in the future :)