Ameer
Ameer-
Power & Control Panel
08/01/2020 at 08:40 • 0 commentsAfter completing the mechanical assembly of the rover, a Raspberry Pi-4B computer and Several other components will be places on a panel inside the rover - ultimately connecting to the 10 Servo Motors that move the rover. It will be wirelessly controlled by a tablet that communicates with the rover over a local network using an on-board rechargeable router.
-
The Floor Panel I used for the rover is a 3mm thick clear plex glass piece.
Size is 40cm x 23.5cm so it Slides in from either front or back of Rover Chassis box and fits perfect inside the Aluminum Extrusion Grooves. I 3D printed 2 simple middle Floor Support Arms (shown in the pic below). I uploaded an stl. for them with the other files.
![]()
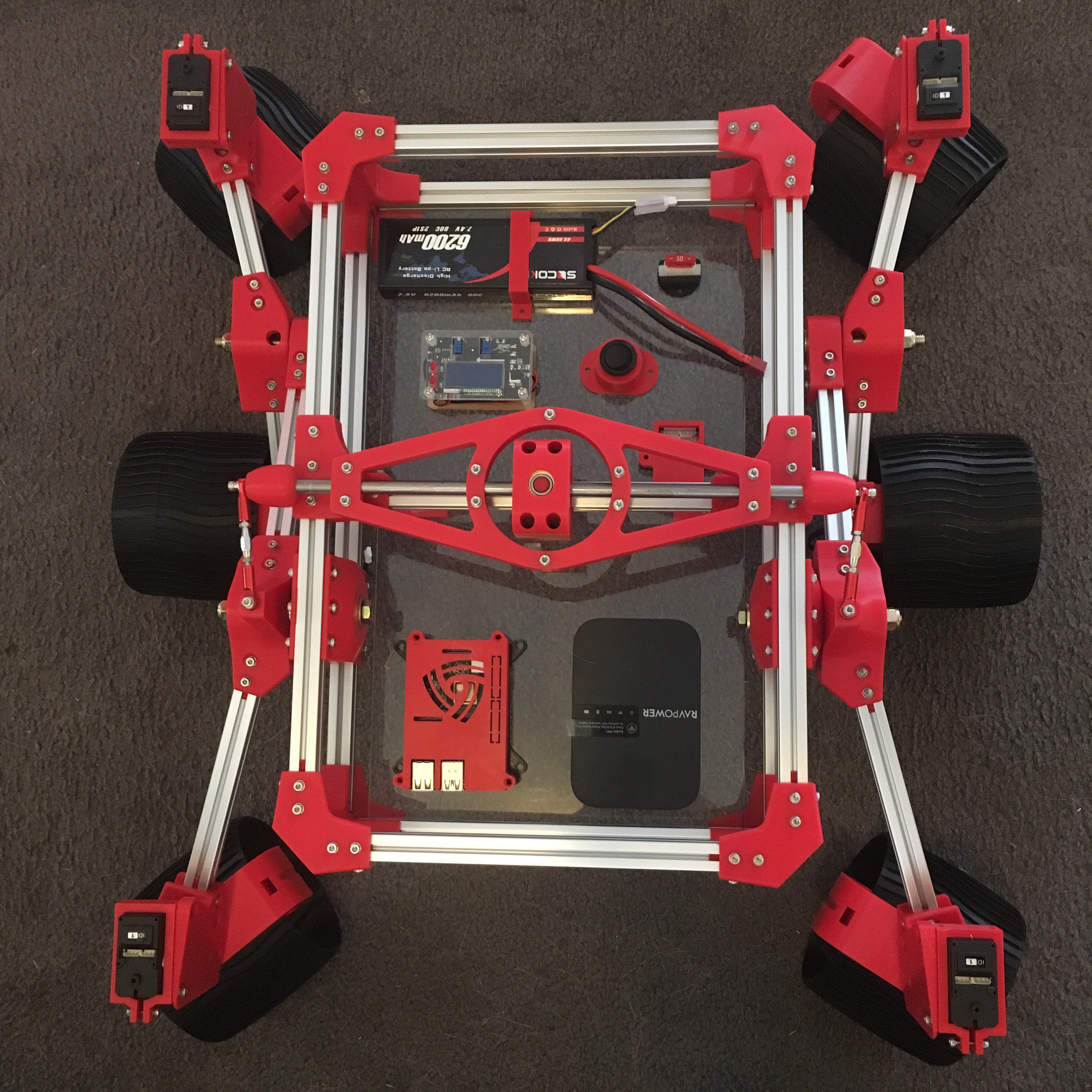
Here is a pic of the parts that will be within the rover's compartment, randomly placed on the floor panel:
![]()
From top left: Battery, Fuse, Voltage Regulator, Power Button, Bus Linker, RPi-4B, and Router.
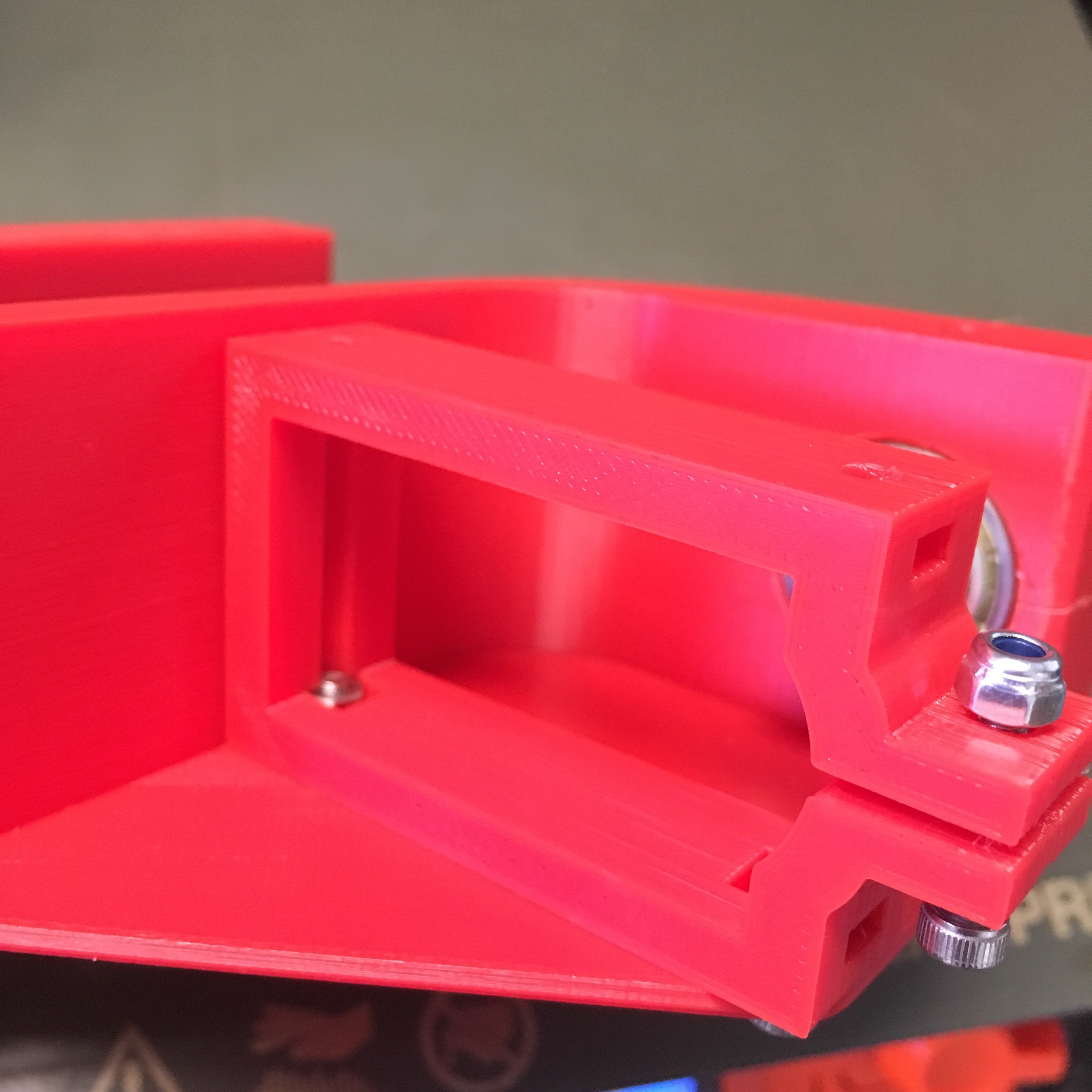
I 3D printed a Bus Linker Housing Bracket (in two parts) to mount it to the floor pan, and cover it, I added the stl.s to the other files.
-
Note: For the Li-Po battery, you should purchase Connector Wires, and a Wall Charger.
-
Mechanically Complete
07/29/2020 at 21:13 • 1 commentOn July 28, 2020 the Rover finally stood strong on its own wheels, only two days before the launch of Nasa's Perseverance Rover to Mars.
I want to thank Roger, Laura, and my brother Johnny for their support and help.
![]()
-
Non-Original Parts
07/26/2020 at 20:07 • 4 commentsThe original design (Sawppy 1.0) works, but as Roger and a few others noticed some wear & tear they made recommendations. In addition to all the 3D Printed parts that are edited and differ from Sawppy 1.0 here are some mechanical ones:
* I bought and used Screws, Washers, and Locking Nuts for the Bogie and Rocker Joints, instead of using the Steel Shafts. They fit the Barings perfectly. 4 Screws, 4 Nuts, and 16 Washers.
![]()
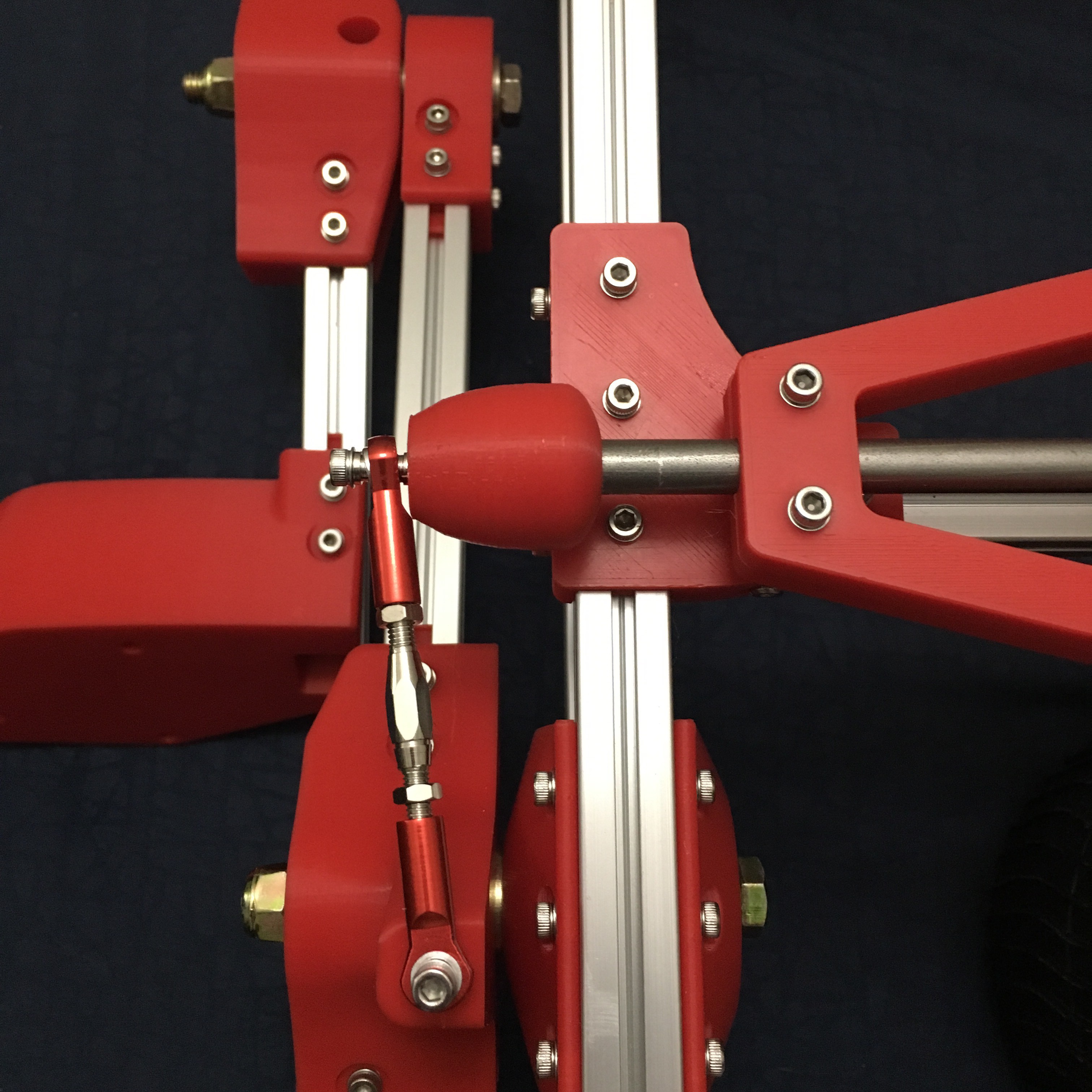
* I redesigned the 3 parts of the Central Differential joint because they were the only parts on the list of '3D Printed Parts' that didn't fit properly, I simplified the shape and made the top and bottom to accept 24mm M3 Screws and Locking Nuts. Only 4 needed (the black screws in the pic below). I also used locking nuts on all 10 Screws that combine the long differential cross members together (4 visible in the pic). I will be using locking nuts on other parts later, so if you copy this design get yourself two dozen M3 locking nuts.
![]()
* I used 40 of the 12mm M3 Button Head Screws to mount the 10 Servo Couplers onto the Servo Metal Horns. They were those, from Ace Hardware:
![]()
![]()
* I bought 10 Metal Horns They were these https://www.amazon.com/gp/product/B07D56FVK5/. The same ones used on the CJ Rover (Thank you Laura), I used different screws on them than CJ had - so on my rover the screws go into the coupler first then exit and thread onto the metal horn. In the pic below, they are the perfect length and they end up flush with the metal horns they screw into.
![]()
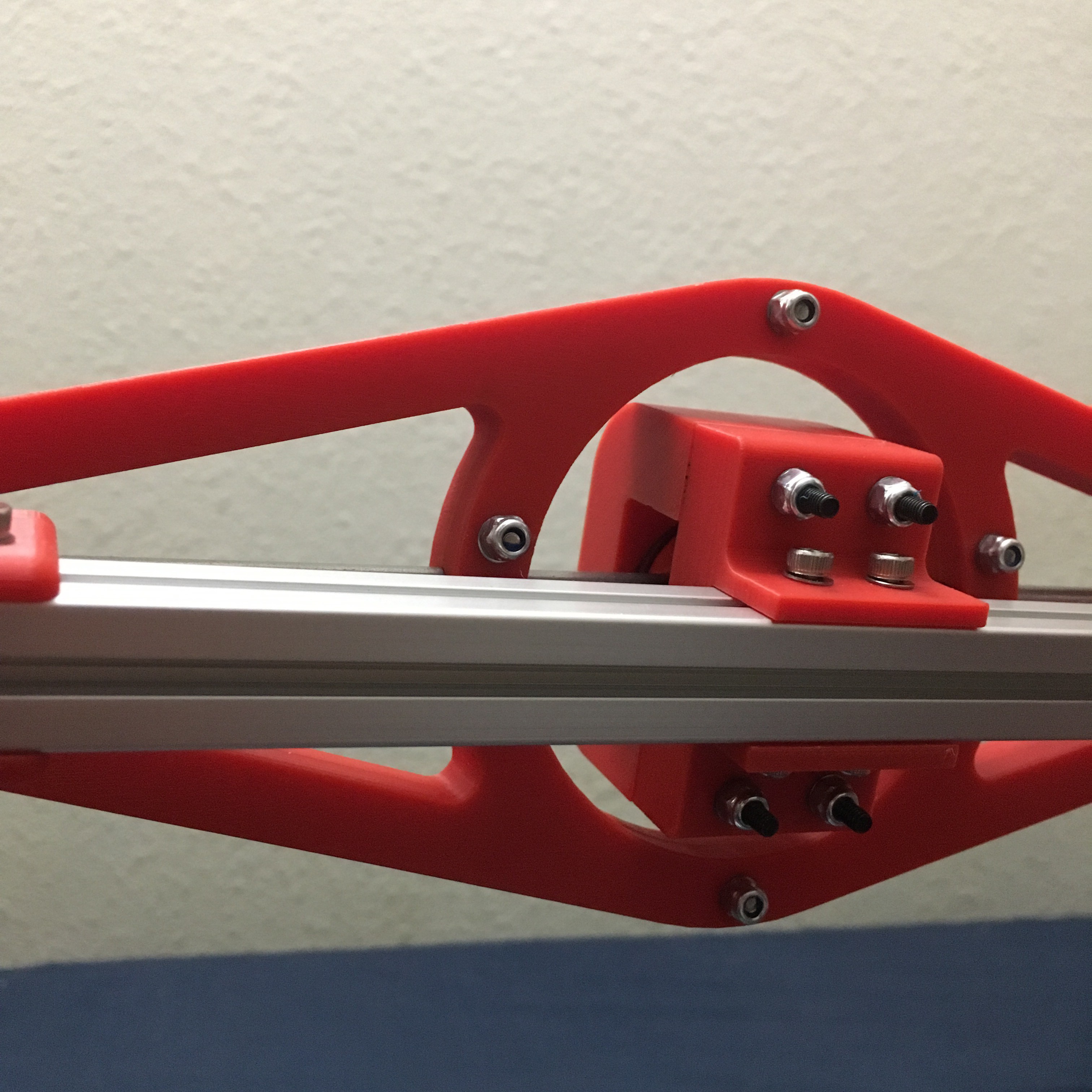
* I used a 16mm M3 Screw and a Locking Nut for each of the 10 Servo Bracket Clamps that I redesigned to clamp the servos. Also visible are the two slots I designed for nuts to properly mount the bracket to the wall.
![]()
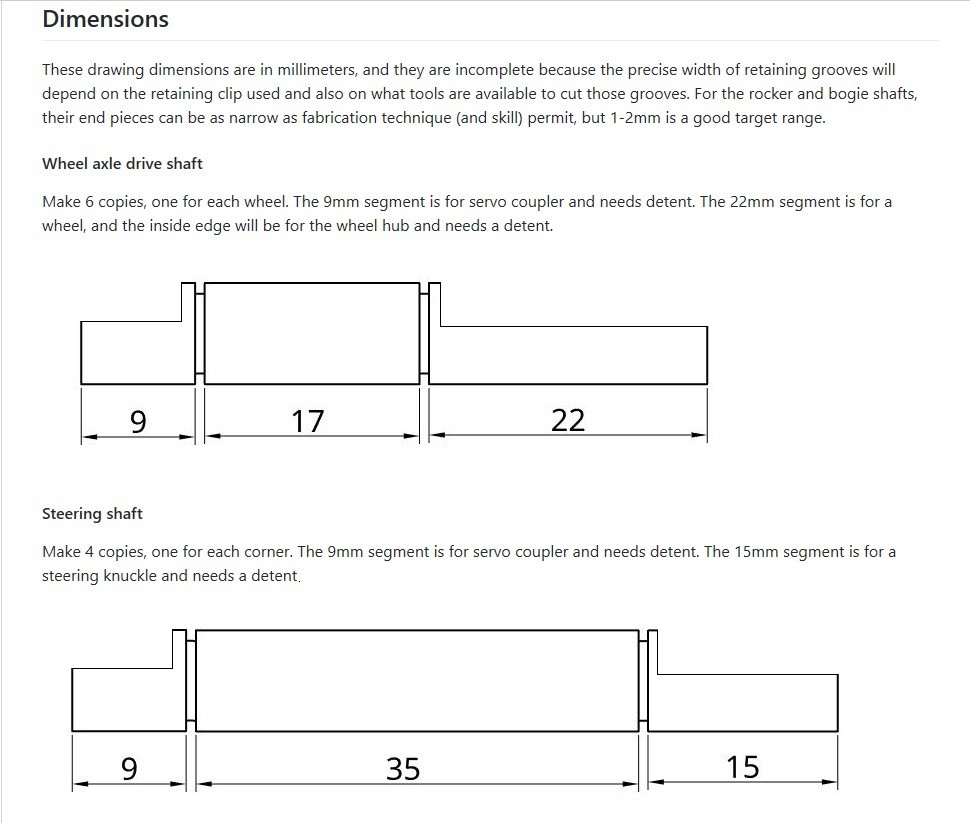
* The shafts for all 10 motors: I shaved the same detents used on the CJ Rover, which are different than the original design (Shaved all the way to the edge on both ends). Those work with the original design parts, but work better with the couplers edited and printed for them in the CJ design, which I also used (Wheel couplers and Servo Couplers).
![]()
The diagram is an edit from Roger's original diagram.
![]()
* The main wiring harness connecting the Bus Linker to all 10 motors in parallel can be configured in several ways, I chose to buy wires with compatible connectors that plug into each other and create the needed harness without cutting any wires.
The original connector name of the LX-16A servo is 5264-3Y. The 3 is for number of Pins, and the Y is a designation for the shape of the connector. I couldn't find long wires with end connectors that are 5264-3Y.
I believe they use these https://www.yoycart.com/Product/532736572990/ and those http://www.crazell.com/product/molex-5263-3p/ but I want my rover to have as many Plu-n-Play parts as possible, so I bought Universal Servo Wires: they fit tightly in the connector slot, have 3 pins that are separated by 2.5mm from one another, and they come in male-male wires, male-female extension wires, and splitter wires.
![]()
![]()
-
3D-Printed Parts
04/26/2020 at 03:52 • 0 commentsMy first assignment was to print the 3D needed parts. I used my Prusa MK3s and Red and Black PLA. I printed 'ALMOST' all the parts from the .stl files posted by Roger. However, I used some variations:
Mirrored Parts:
I printed the 4 corner Knuckles mirrored to place the motors in symmetry, and at some point in the future I will be printing 3 wheels mirrored because unlike on the real curiosity rover our wheels have directional spokes.
Edited Parts:
I printed 4 components from the STL's edited by (CJ Rover) to accommodate enforced mounting of moving parts, two of those 4 components (Triangle Wheel Couplers, and Round Servo Couplers) I printed at 100% infill for Strength.
I also printed 4 parts from my own redesign (The 3 parts in the Center Differential Joints), because the central differential joints didn't fit properly from the original .stl. I printed the bottom one in a different shape. As I got close to mounting the servos and wheels I didn't like how the servos mount into the brackets or how the brackets mount into the walls; so I redesigned the Servo Brackets (and printed all 10 of them with 100% infill).
Optional Parts:
I printed a housing for the Bus Linker (2 parts) and Support Arms for the floor panel (2 identical arms)
Did not Print:
I did not print the Battery Tray or the Power Tray; I placed them inside the body of the rover.
![]()
![]()
COSTS
* 3D-Print the Parts Yourself $100
I used less than 1KG of Black PLA for Wheels, and less than 2KG of Red PLA for all other parts. I Paid $75 on eBay for all 3KG Shipped, and my Printer used about $20 worth of Electricity. If you have a 3D Printer with suitable size bed you should be looking about the same of what it cost me.
* Have someone 3D Print them for you $600
Don't have a 3D-Printer? Don't want to learn the Slicer software? or deal with 2 Weeks of printing? I found a few places online, and this one seems reputable https://print.all3dp.com/ so I uploaded all the parts and the total was $600 for the Entire Set; Filaments, Tax, and Shipping Included. I suppose you just have to instruct them which parts you want mirrored along the x-axis, and about the infill factor.
-
Raspberry Pi 4B
04/25/2020 at 16:53 • 0 commentsI decided to use the newest Raspberry Pi model as of today; the RPi-4B.
It can be powered via the USB-C port, and it uses a Micro-HDMI to output display. You will also need an 8GB Micro SD Card (or 16 or 32; I chose a 16GB), and an SD Card Sleeve for it.
https://www.raspberrypi.org/downloads/
Download The firmware Raspbian onto your PC, download Installer onto your PC as well, then run Installer and choose Raspbian as the firmware and the Micro SD Card as the place to install its image. Your SD card is ready to be placed into your RPi and you can now run your RPi as a small computer; connect a usb keyboard and a usb mouse and a screen to it, turn it on; the user interface looks like any Windows PC.
-
NOTE: If you buy a Pi4-B make sure you also buy or have:
HDMI- Micro-HDMI Chord
USB-C power & chord with 5 volts and 3.1 amps
Gen 10, micro SD card & SD Sleeve
You will need a USB Keyboard and a USB Mouse later to use the Pi