 RC ORDNANCE
RC ORDNANCESWITCHING GEAR...
(continued from log "Gearbox Mk1")
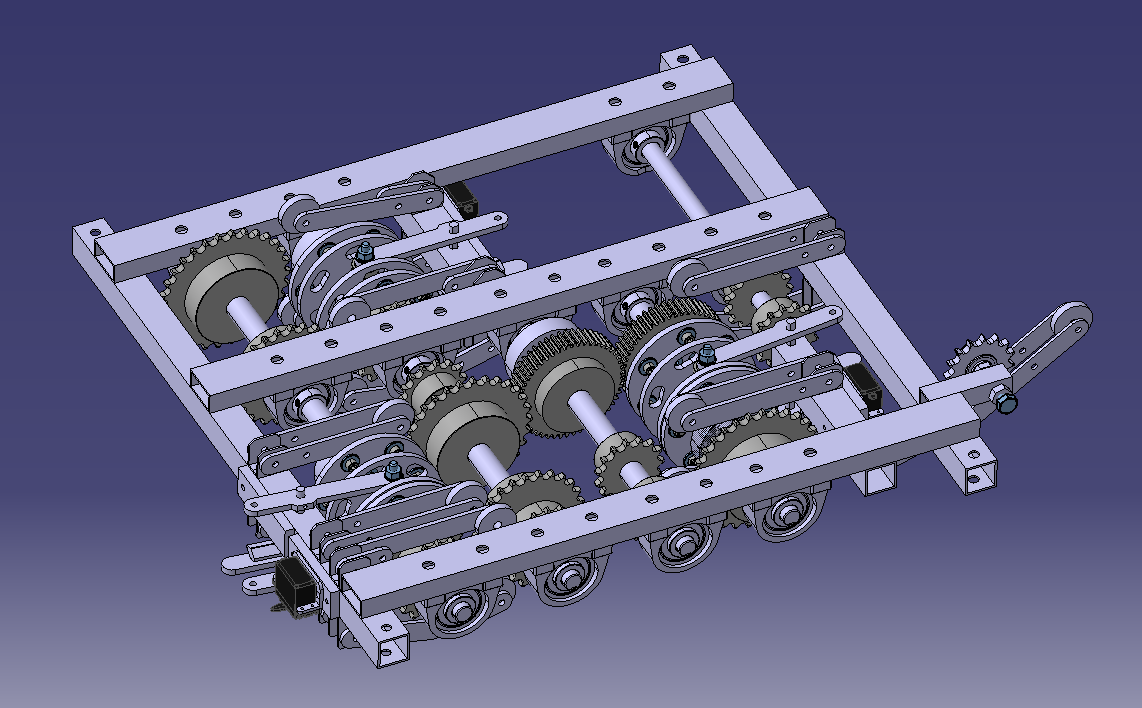
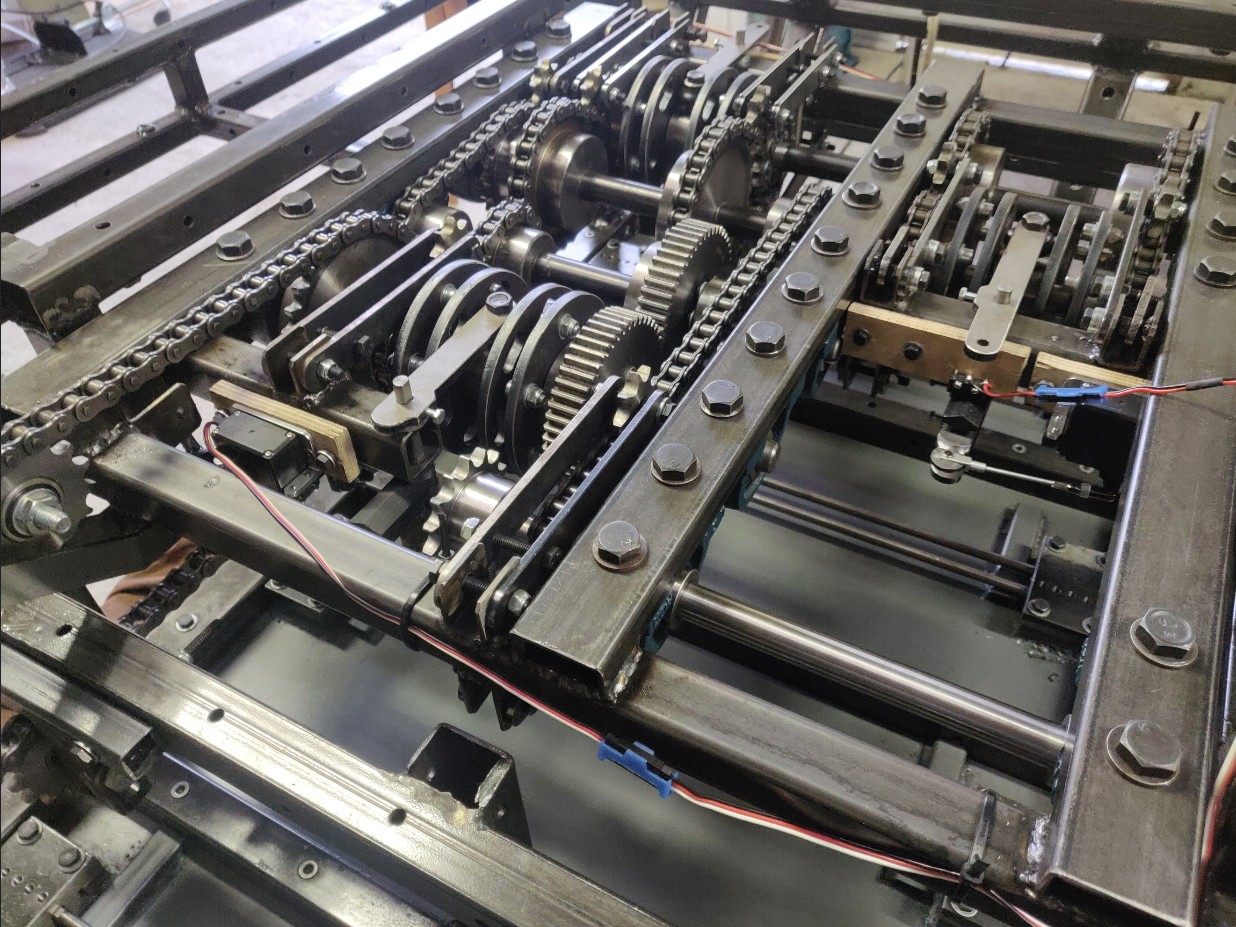
Since I was going to face major problems with the Mk1 gearbox, I anticipated the construction of Mk2, featuring :
-Sprocket tensioners
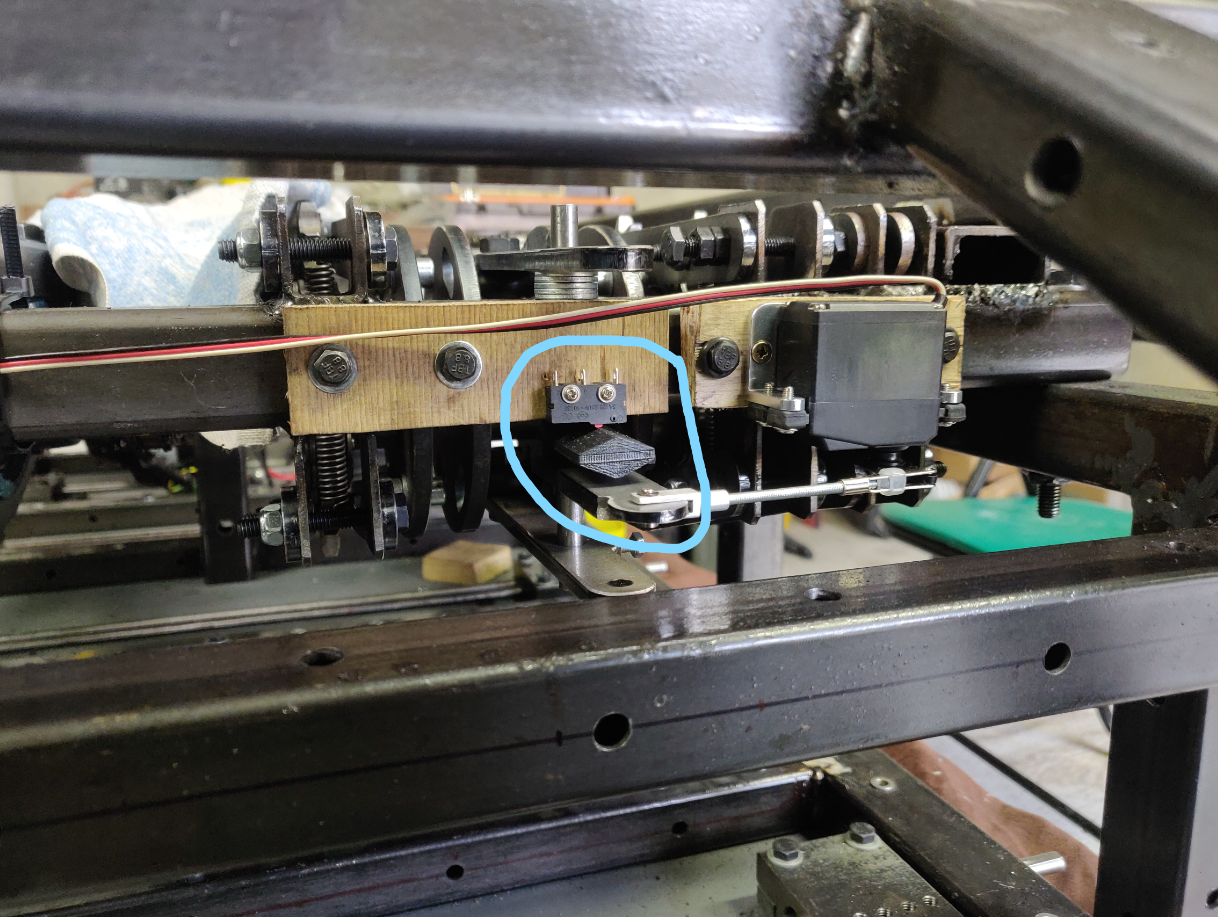
-Full metal shifting forks
-Additional shaft, allowing to dismount the gearbox more easily.
It features 4 reversible gears.
There are no synchronizers, jus basic dog clutches. The dog clutches are motioned by 9kg RC servos, from an arduino.
It is a semi-automated gearbox : when pushing "shift up" or "shift down", the algorithm does all the necessary steps to change gear.
It is a semi-intelligent gearbox that detects when errors occure (e.g. blocked mechanism) and acts accordingly.
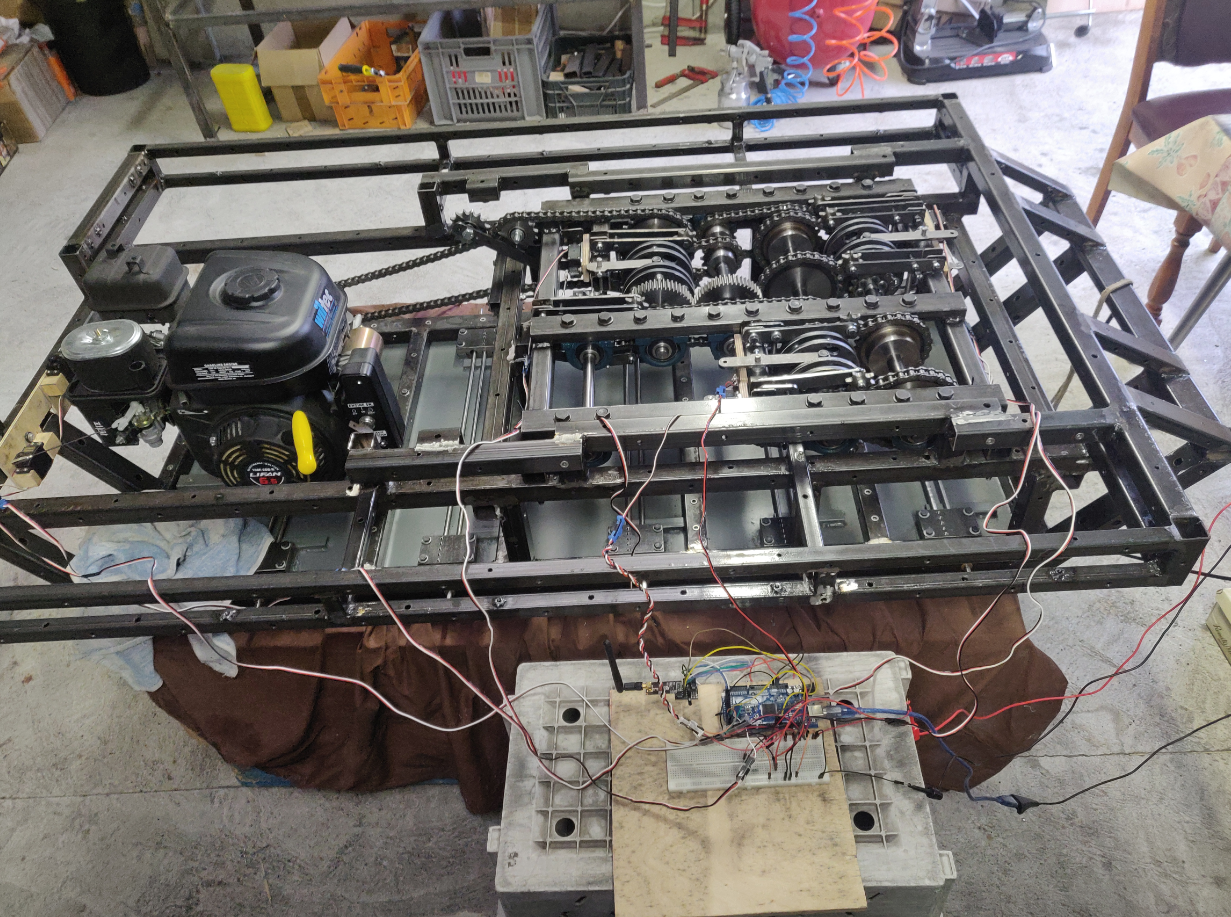
The first trial turned to be pretty succesful and quite promissing :
Cfqdfdqfgf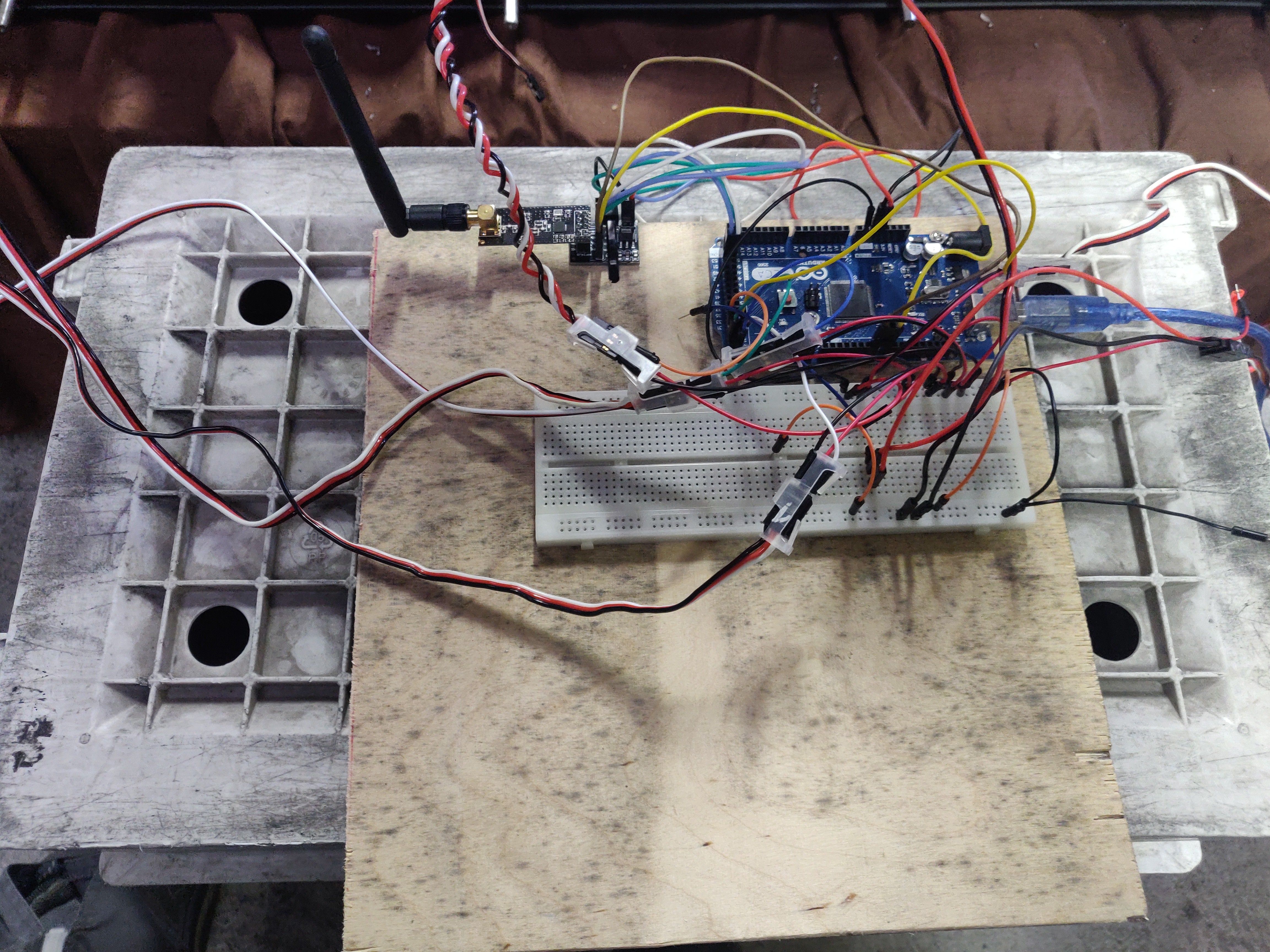
CONCLUSION
The concept proves working pretty well (including at high speed) without load.
We'll have to test it again with the rest of the transmission, (double differential + steering system) ; under load once the chassis is done ; and under full load once the turret is complete...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.