First, we want an using firmware with the minimum of features:
bring the food from the plate to the mouth at the user’s mouth
clear out the plate
save the mouth position
Our strategy is to learn every position that the robot should reach during the meal and send to the actuator each targeted position.
For that we made an Inverse Kinematic model on the 3rd 3 axis of our robot.
Then other, get their command position from other to keep spoon horizontally and in front of the user.
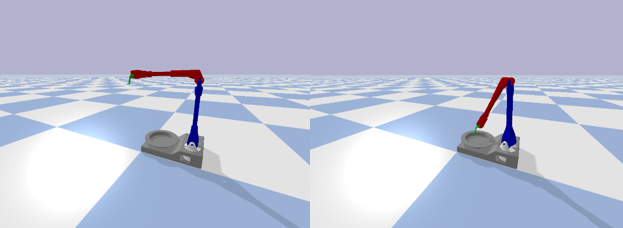
From our CAD model, we create an URDF file of our robot. With that new model, we have made simulation with PyBullet. We were able to test our Inverse Kinematic Model.
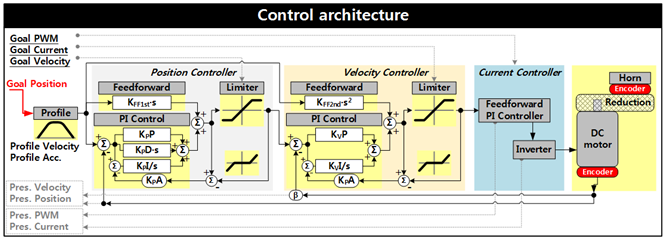
From that simulation we learn each position that actuator should reach. That’s why using Dynamixel actuator is very interesting we don’t need to write firmware to control properly the motor everything is settle. We just need to know the position that we need to reach. After learning each position that actuator should reach, we just need a function to send target joint position.
Before using this firmware, we made a calibration firmware to set each actuator to be like our model, where output is calibration parameters that able to transform joint position in our model to actuator command and reciprocally actuator position to joint model position. It’s was little bit tricky due to our mechanical design 3rd joint position depends on 2nd and 3rd actuator position.
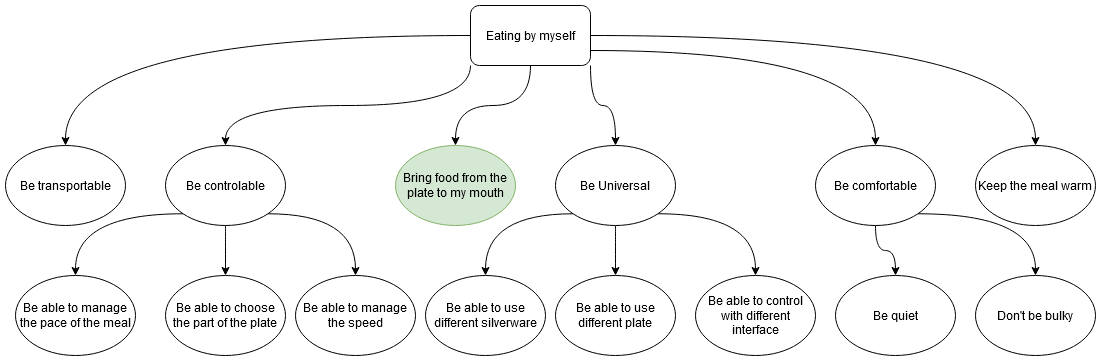
Our project is born from an issue feel by a user: Christelle. It’s very interesting because Christelle give us feedback constantly and drives the designing process with her feeling on the device. We can figure out her requirements with acceptance criteria. She is committed. Of course, the principal need for her is to eat by herself, and she gives us a lot of details and additional requirements.
Over the past two years, we have been able to meet users of electric meal assistants and experienced professionals who have been able to tell us which specifications are most important to them. Who better than the people concerned can explain their need !
We also found design advice, in the scientific literature (see below) which has increased in recent years to strengthen our codesign approach.
We have listed below by priority:
bring the food from the plate to my mouth
Serving food at my mouth
Pick up food in the plate
Be controllable
Control the pace of the meal
Choose the part of the plate to eat
Be comfortable according to the lunch time
Be quiet
Able to see the food in the plate
Not bulky on the table for me and people whose eating with me
Be transportable
Be universal
Use different command interface
Use different silverware
Use different plate
Be customizable
Keep the meal warm
User Need Diagram
Regarding these specifications, we chose a robot as solution that can be controlled by users with different interfaces.
We thought a mechanical design 6-axis robotic arm, 3 joints to reach positions in the space and 3 joints to give spoon orientation. Each of these joints will be animate by an actuator.
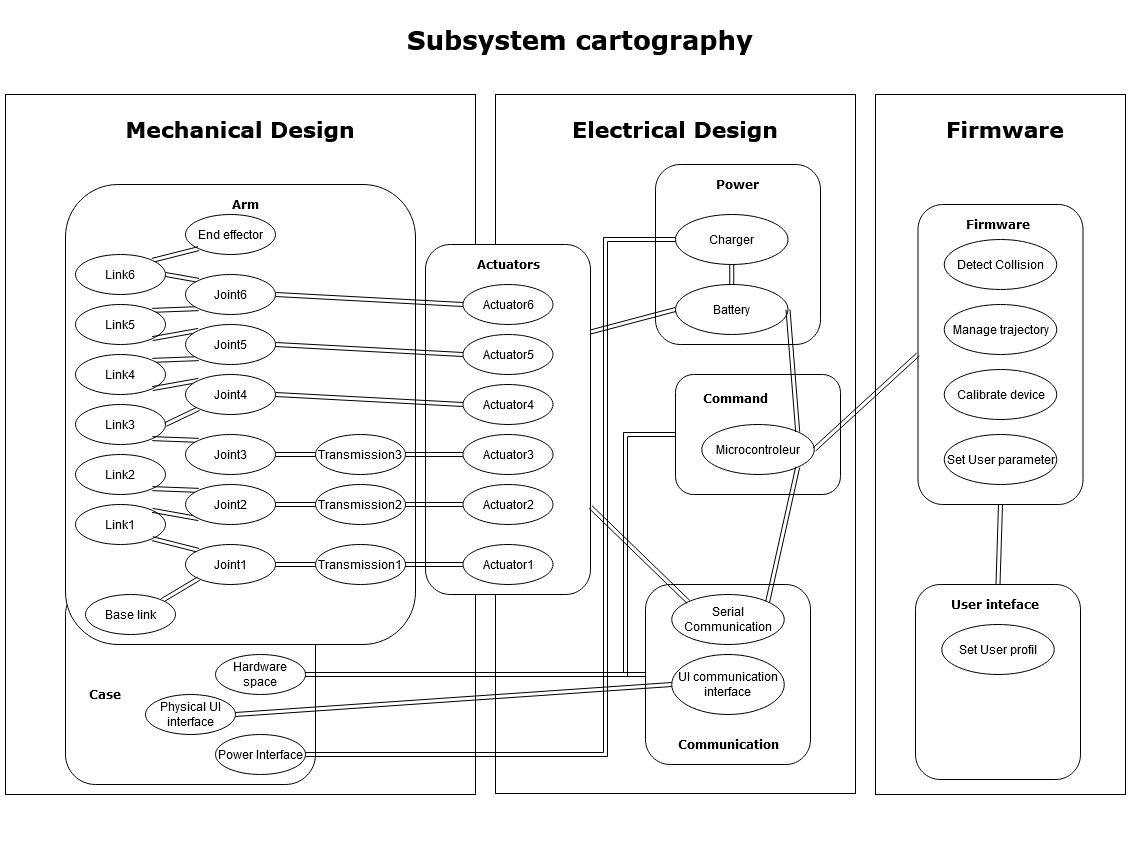
For commanding those actuators, we need a processor (brain) able to catch information command from users and send command to the actuator which needs power supply. It’s a system engineering which require skills in mechanics, electronic and computer science.
That’s why we divide the whole product idea into subsystems and beyond simply establishing requirements for those subsystems devising an order in which each subsystem must be defined. It also determines which dependencies between subsystems are needed for proper operation. You can see below our subsystem cartography.
We decide to start working on mechanical design, we established that was priority.
Because we can buy actuator on the market, use prototyping tools like Arduino board, laboratory power supply for electrical part.
Then for the software, we can use Arduino language to design an firmware and can easily be prototyped on mobile app using MIT App inventor project as user interface.
We define design input for each subsystem, which include Market Requirements which are typically the story of the product, its primary use cases and the environment where the device will be used. Product Requirements which are more of a technical understanding of what will be needed in order to achieve the use cases and working with another subsystem.
We figure out Risks associated to this sub system and verification test.
Many potential users cannot access a robotic assistive device for meal because of the prohibitive cost.
We are convinced that thousands of users with very diverse profiles (children, adults, seniors) could need this help to regain autonomy and pleasure at the table
Under a free and license, this project will participate in the common good by allowing anyone on the planet to be able to reproduce, upgrade, remix, share and repair it.
We made the choice of a Creative Common License to diffuse the files of our solution.
The Open assistive arm for meal is made available under the terms of the Creative Commons
Please note that our solution is not an automatic feeding device, it was designed to help users with motor disabilities who want to eat alone to have greater independence in their lives. The user must have control of the device through its interface at all times.
Interfaces:
The control interface and its suitability for the capabilities of the user is essential when you have a disability. It conditions the effective use of the assistive device whatever its nature (wheelchair, computers, call bell...)
There are many interface commands available on the market and the best way to determine the command interface is to use the services of an occupational therapist who will evaluate and provide the solution that best meets the person's needs and possibilities.
Regarding the ordering of commercialized meal-taking solutions, the interfaces commonly used are satisfactory in most cases but remain standard and do not use the latest technologies available. They are activated by switch which is a standard in the special need field.
The switch closes an electrical circuit which will be detected by the device to be used. It has a 3.5 mono male jack connector and the device must be equipped with a 3.5 mono female jack.
There are different types of switch which have different sizes and sensitivity and adapt to many motor possibilities. They are placed opposite in a zone or a reliable, repeatable and non-fooling movement. Typically, they can be installed near the hand, a finger, but it can also be at the head or anywhere else where we obtain an exploitable movement on the part of the user.
What we want to do on the interfaces is unprecedented work that will allow us to adapt as much as possible to the needs of the user and to the equipment he already has:
We want to offer the possibility of connecting switches.
The possibility of connecting special power wheelchair controls.
Control the device by a smartphone application.
The ability to control the device with the joystick of a power wheelchair via bluetooth.
And go further by offering voice commands and vision detection (this option could be very interesting for people whose posture changes during the meal and cannot standup)
Our work can be fed by many open source projects which already allow the use of the wheelchair joystick to control a computer or a game console, for example.
For the moment we have concentrated our efforts on the general design of the robotic arm and we are voluntarily limited initially to a control by switch.
Thus, our solution has :
two 3.5 mm jacks ports to connect switches
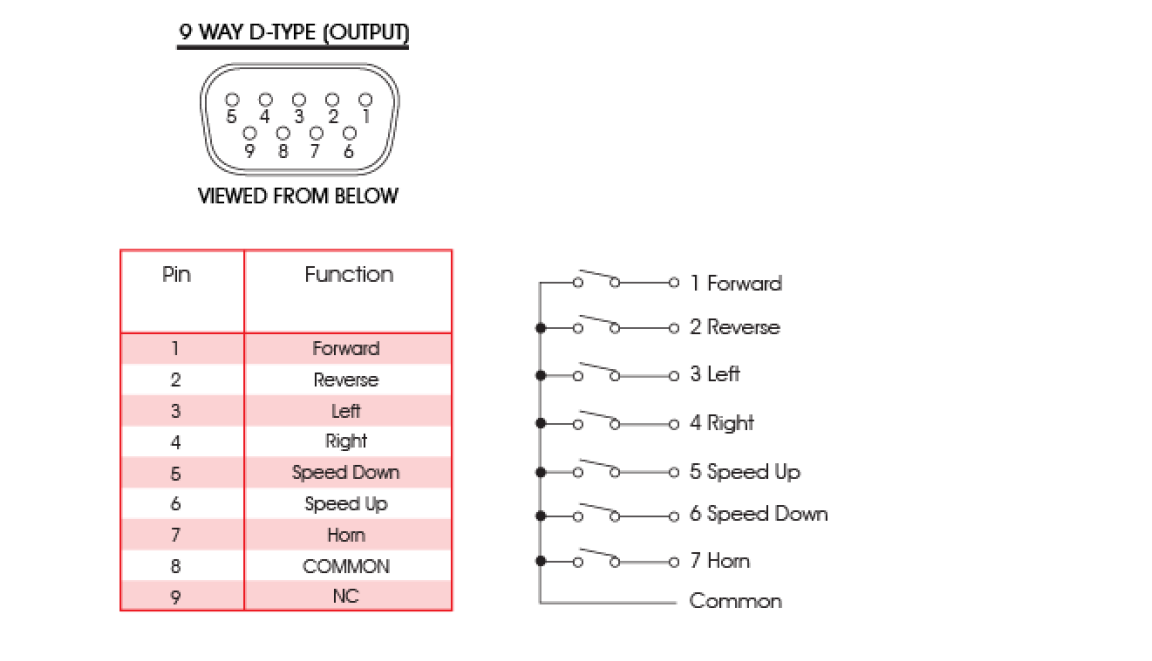
a Sub D 9 socket (standard specific power wheelchair special controls)
A bluetooth module HC 05 (for app control and wheelchair joystick control)
Subsequently, we will work on the use of special controls (hence the presence of a 9-way socket) and other feature's interaction mode, but we have to proceed step by step.
Operation:
The user sits in front of the table on which the robot is placed. Human assistance is needed to serve the food on the plate and initialize the position the spoon should reach.
The position of the spoon is recorded by the third person by pressing the button embedded in the arm. Then it's up to the user to take control.
an action on the command interface leads to the control of robot actions
the descent of the spoon on the plate then will pick up food from the plate and go up to the user's mouth
another action explores the contents of the plate.
We plan to offer different usage and control profiles that will adapt to the user's needs, desires and abilities.
So, we can imagine being able to come and choose a portion of the plate to eat a particular food, or imagine a greater control of the robot's movements.
The operation must be adapted to the possibilities of comprehension of each one and limit as possible the actions which could be tiring for the user.
After the realization of the first prototype, we spent a lot of time in 2019 and early 2020 presenting our project and looking for partners.
From the presentation in a nursery school to maker events through exhibitions dedicated to health, we were able to meet potential users, makers and contributors giving us their opinion and wanting to take part in the project.
The search for a sponsor also took time and allowed us to find the money to buy prototyping equipment, allow the hosting of interns and make the project sustainable. The challenge now is to face an increase in costs to test our device in good conditions, to continue its development and to certify the device (testing in laboratories) in order to comply with the regulations in force
After the realization of several prototypes, and the positive feedback from potential users encountered during the presentations, we can say that we have a proof of concept, which consolidates us in our approach and pushes us to imagine other avenues development and distribution.
We have the support of our association, APF France handicap and obtained the financial support of the Bourgogne Franche Comté region, the Department and the CPAM of Nièvre to :
Continue the technical development of this aid and design a solution with a high level of quality and safety.
Carry out a use experiment
Study diffusion and distribution models.
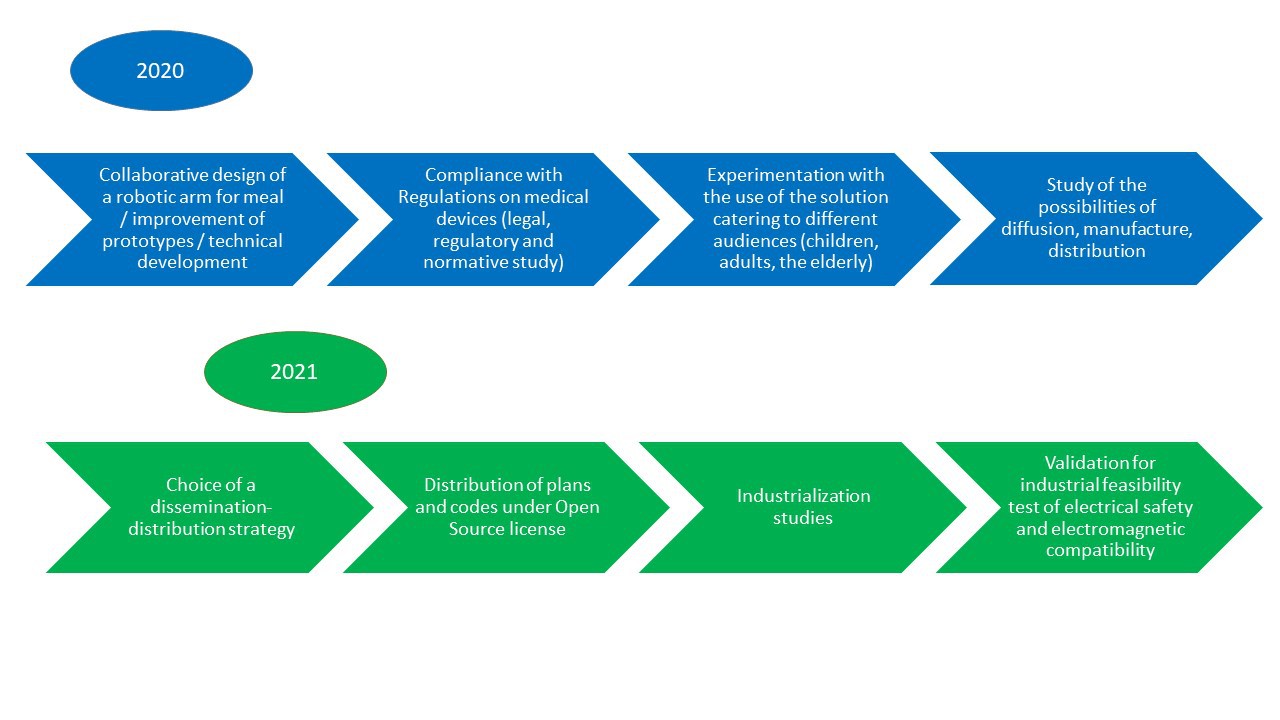
Here is our roadmap for the for the next few months. Our objectives and their deadlines will vary according to the new means and supports that we'll find.
We are aware that the provision of a finished product, respecting the regulations of medical devices, is a guarantee of increased safety and accessibility for all.
Thus, several possibilities have been imagined to generate income, allow the sustainability of the project and the development of new means:
Assembly by oneself or with others, with the help of free plans available online and the support of a community. The user is only responsible for purchasing the equipment.
The sale of detailed instructions, video tutorials, "premium" support for people who want more support.
The sale of kit to assemble (including all the material necessary for the assembly).
The sale of a finished product was not the idea at the base of the project, but it is an avenue to be seriously studied to allow as many people as possible to access this aid.
These ideas deserve a thorough analysis and we will soon launch in November a study with the association ALTER'ACTIONS to consider different distribution possibilities and to study a relevant strategy within the framework of a social and solidarity economy approach.
Economic potential:
For thousands of potential users, there is an unmet need to be able to access a solution allowing them to regain autonomy and pleasure at the table. The needs in terms of disability compensation are increasing and aging contributes to increasing this phenomenon.
The different broadcasting and distribution models envisaged will have to take into account the current market, and certainly use new broadcasting channels in the field of disability compensation.
The technologies used, the open and collaborative approach make it possible to envisage localized design, production and associated services that generate employment.
This could be done in partnership with companies and services providing assistance through work, companies adapted in a social and solidarity approach.
It remains to study and determine the shape of the structure supporting this project to allow as many people as possible to access this aid.
After the success of the first prototype which is a Proof of Concept, we decided working on a new prototype which meet Medical Device Regulation requirements, include security features to detect collision with the environment, review mechanical part which should be hermetic. Then we plan to do clinical trial with Christelle and other users.
Team
To reach the goal, we have been joined by 3 more students from different background.
For the technical part we had hired two more student as intern from mechatronic background. Daria Kuznetsova, student in mechatronics engineering, who is working on actuator control and electronic design. Glenn Van Hemelryck, student in mechatronics engineering, who is working on software part, including user interface and features implementation. Georges Tawil, biomedical engineer, who is designing mechanical parts of the device.
For regulation and quality part, we had hired, Ludovic Louisonne, student in biomedical engineering, who is working regulatory and quality strategy to provide a device compliant with European Regulation (Medical Device Regulation 745:2017, Quality Management System ISO 13 485:2016). He started a first work redefine device specifications according to the European medical device regulation. Second part, he was working on CE marking strategy via Biotika university company supervised by a regulatory expert.
Prototyping
After settling the work team, we define our roadmap. To develop quickly our next prototype, we make the choice to use actuator (motor, reducer, driver, encoder, torque sensor) on the market that it helps us toreduce the developmenttime and skip actuator development. Later, we will thing to make our own actuator if we judge that can help us to reduce the cost of device.
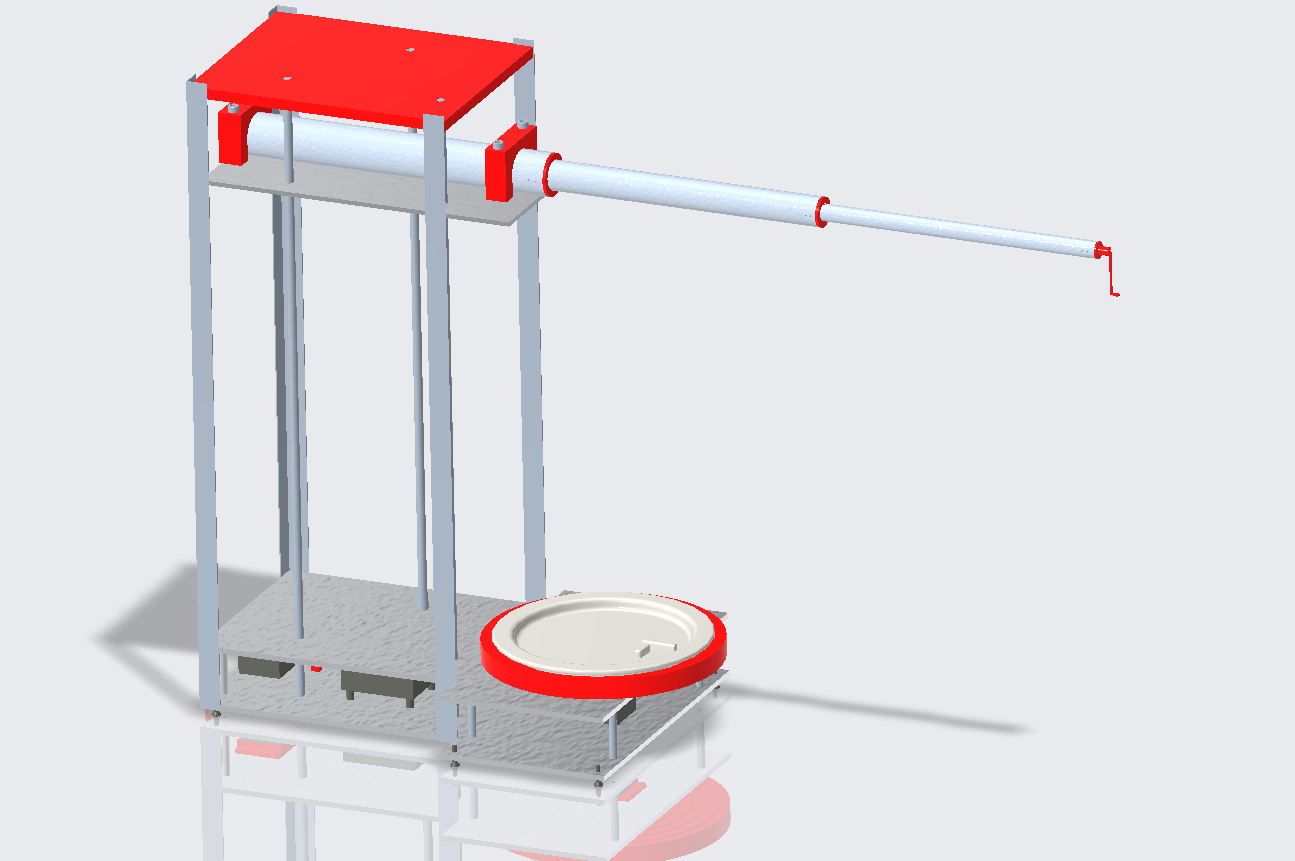
Mechanical Design
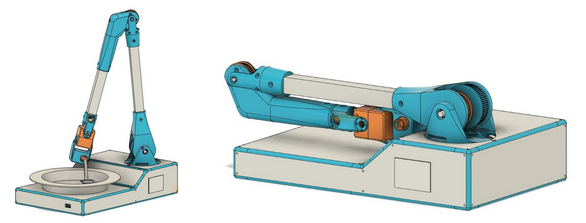
First, we are working on the mechanical design. We reviewed our first prototype P0 designing then decide to add a 6th axis. We add an axis to adjust a lack of orientation which can be an issue in some case. We changed mechanical design of the arm to be more rigid, we use aluminium profile. We still use reducer for the firsts 3 axis for that we use timing belt. This kind of transmission is cheap, quiet and allowed to place actuators close to base of arm. Using timing belt allows to use actuator with smaller torque. We always think how to reduce the cost even if it’s can complicate prototype design. We also work on a user’s need, Christelle, our user ambassador, wants bring the device int the restaurant for that we thought on a design to be foldable.
Actuator selection
For selectingactuators,we defined requirements for each joint, angle range, maximal speed and the most important torque. The range was defined by planned trajectories to be functional. The maximal speed is defined very slow such as human motion. Finally, to determinate torque needed for each actuator we made static study for each joint considering all worst cases, particularly for the last joint we made test with food.
Software and Actuator controlled
First, we are working functional features:
Saving spoon position
Learning all trajectories for going all over the plate and bring the spoon at the saving position which is closed to the mouth of user.
Then we will work on implementing security features to detect unusual collision with the environment to prevent from injury risks. that will allow us to reach safety requirement.
Finally, we will makea user interface to facilitate utilisation, we thought to use a touchscreen on the device that increase the price of the device. Or we also thought to use Bluetooth connexion to connect with a smartphone application, it’s required for users to have a smartphone.
Medical Device Regulation
At the same time, we are editing European technical documentations, with help from a company and a test laboratory,these documentations consist of:
List of specifications, user’s needs,security and environment requirements
Risks Analysis
Device history files which explain and justify all designing choices
Pre-clinical tests, electrical security and electromagnetic compatibility.
Clinical evaluation, demonstrates technical performances and user security
We are following, the same process to get CE Marking which can guaranteedesign quality and securityof our device. As medical device, it’s for us really important to provide and prove that our device is functional and can be used safely such as others devices on the market.
Our goal it’s to have clear documentation on design part of technical documentations, there is another part which concern manufacturing we don’t approach for the moment.
Based on previous work from hackathon team and CAD model designed. In December 2018, Georges Tawil, biomedical engineering student, joined the project asan intern. His mission was makinga first prototype in 3 months for that we had plannedto:
Review user’s needs and others specifications
Make a benchmark, reviewing all the device on the market, patents and scientific paper on the subject
Compare different solutions
Design a prototype
Specifications
His work started by reviewing device specifications with the occupational therapist, personal care assistants and users, we figure out interesting points:
From user and environment, the device shall not be overcrowding, noisythat can disturb the moment. Then thereached point of spoon shall be far from the table, in fact,usersare mostly on a wheelchair which is big and cannot go under the table. These factors extend distance between the plate and the mouth.
That device is a technical aid and can be considered as medical device as others devices on the market. In Europe and North America, there are regulation for those kind of device
Accessibility which is financial first, based low cost manufacturing process for fewunits and built with standard components
These new specifications lead us to change the first solution designed during the hackathon that one judged overcrowded to be on the table.
Benchmark
Then, we hadsearchedwhat areavailable on the market adaptive fork, spoon, mechanical device and robotic device. These devices are different and are prescribed for different disabilities. When this is not accessible, a personal care assistant is required to help people with upper disabilities to have lunch. If we look furthermore on robotic device there is 4 devices on the market: Obi®, Neater Eater® Electric, Bestic® and iEat®. All are sold more than 6500 euros.
Obi® is a 6-axis robotic arm with rotational 4 compartments plate
Neater Eater® Electric is planar robotic arm of 3 axis with rotational plate
Bestic® is a 4-axis robotic arm
iEat® is a 3-axis robotic arm with rotational plate
Each one of those solutions has advantages and drawbacks
Comparing solutions
We thought about 3 solutions:
Device which can move the spoon in a plane with 2 axis combine with a rotating plate like the neater eater or the solution proposed in the Hackathon.
Device which looks like a crane combine also with a rotating plate similar iEat
Device which looks like robotic arm with 4 to 6 axis such as Bestic or Obi
Regarding specification and devices available on the market, we chose a 5-axis robotic arm as solution, 3 joints to reach positions and 2 joints to give spoon orientation. And we made quickly a prototype out of cardboard to validate the solution.
Prototype Designing
We started thinking which manufacturing process can we use and to build part inspired by frugal innovation. Of course, we thought to use 3D printing for most of the part but for large part and structural part which shall able to support load, 3D printing is not efficiency. We include the possibility to make part by using laser cutting or CNC machine.
We allow us to use standard components like bearings, screws from handicap and 3D printer which are widely available on the internet or DIY stores. By thinking first of the manufacturing process possibility,we expect to reduce manufacturing cost and be sure that it is possible for anyone to make his own easily at home.
We were using cheap stepper motor controlled in open loop without encoder. This first prototype (see project page) costs around 300 euros, it is a Proof of Concept.
To conclude, based on 3D printing and laser cutting part, stepper motor, Arduino we had built a first prototype. That one is a proof of concept and it’s functional, it can be use but we didn’t consider security issues. As we said before, its base on stepper motor which are controlled on open-loop on 3 of 5 joints, there is no feedback on the position or applied torque. With that kind of actuators, we cannot add security features to detect collisions, for example between the arm and the environment or the user. This solution is really cheap and functional but using security is not guaranteed.
This project was presented by Julien Oudin in Hacking Health Besancon in October 2018. A team of occupational therapists, electronic, mechatronic and biomedical engineer students started to work on the question leads by user and personal care assistant specifications during 48 hours.
They had designed the first solution which is simple as possible. The first model is built with 3d printing components likestepper motor, treaded rod and 3D printing part. The mechanism works with two prismatic jointswhich enable to move horizontally and verticallyfor bringing the spoon at the mouth of users, and a rotary joint which enable toempty the plate and fill the spoon with foods. The price of this model was evaluated around 250 euros which is cheaper than the device on the market.
At the end of the competition, the project and the solution presented was a success, the team wonthe price of “RégionBourgogneFranche-Comté” to reward the innovative and open nature of this work.
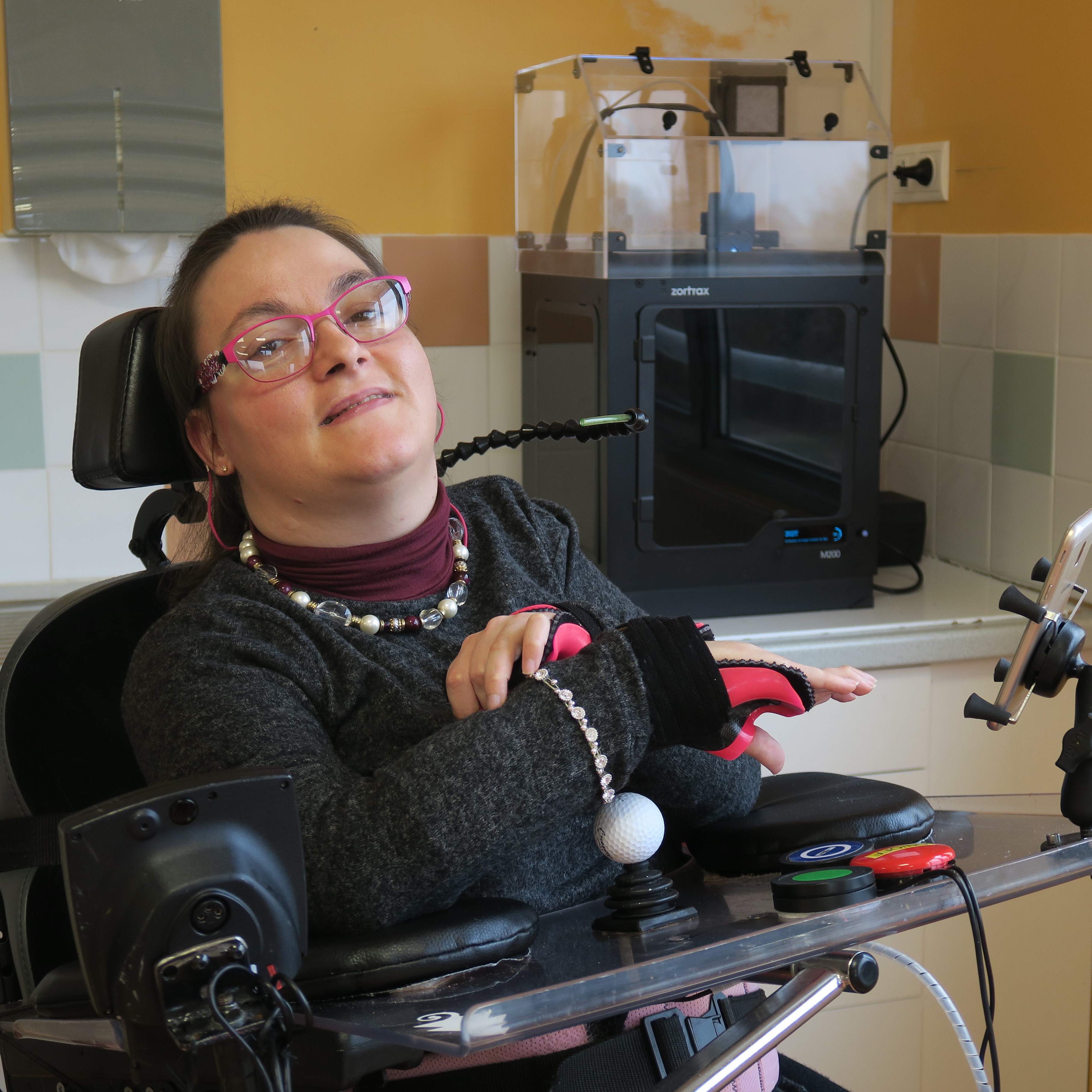
Christelle is a young woman who lives at Imphy's healthcare home. She has cerebral palsy which prevents her from walking and using her arms like everyone else. Despite her motor limitations, Christelle is very active and enjoys being able to do things on her own and her passions are sports, video games, shopping, and going to concerts.
To help her carry out his activities, we have set up various human and technical aids. Some are commercially available, others are DIY stuffs made with digital fabrication technologies.
In 2018, her motor condition worsened and despite physical therapy and medication, it was becoming increasingly difficult and painful for her to bring the spoon to her mouth during meals. This very uncomfortable situation was a real loss of independence for her.
We have tried different technical solutions, but without success. Recourse to the help of a third person was essential for her to be able to eat.
But Christelle's wish was to be able to feed on her own, it's frustrating to see yourself being fed by a third party, without necessarily controlling the pace, and it changes social interactions during meal. She would like to be able to do as before and go to a restaurant with her friends.
In the summer of 2018, we tested a robotic meal assistance solution: the Neater eater®. For two weeks, Christelle was able to try out this great equipment, which allowed her to regain autonomy and pleasure at the table.
It was a tear for her when we had to return the equipment on loan.
This device is very functional, but it costs € 6,500 which is a lot of money. Immediately after the test, we searched to buy this device and applied for funding from social agencies and government aid, but we got only negative responses. This situation demonstrates a glaring lack of accessibility.
As an occupational therapist, I have thought of many people like Christelle who cannot access this help because of its prohibitive cost.
Using 3d printing and electronic prototyping to make small adaptations, within our establishment for a few years, I imagined that it should be possible to design a robotic assistive feeding solution, accessible and at low cost.
This was a vague idea from a maker, and although this idea was running through my head, I didn't have the time or the skills to work on it.
I never imagined that we would be able to study this idea more closely. In September 2018, a workmate asked me to participate in a healthy hackathon. What a great opportunity ! I had a problem and a user need that we were going to be able to study with motivated and competent people during the Hacking health Besançon.
 Julien OUDIN
Julien OUDIN