 Leandro
LeandroThis project is entirely open source and I looking for makers interested in help get this project going!!!!
Slowly I will better detail the project and next step, for now there is a TODO in the project page in github
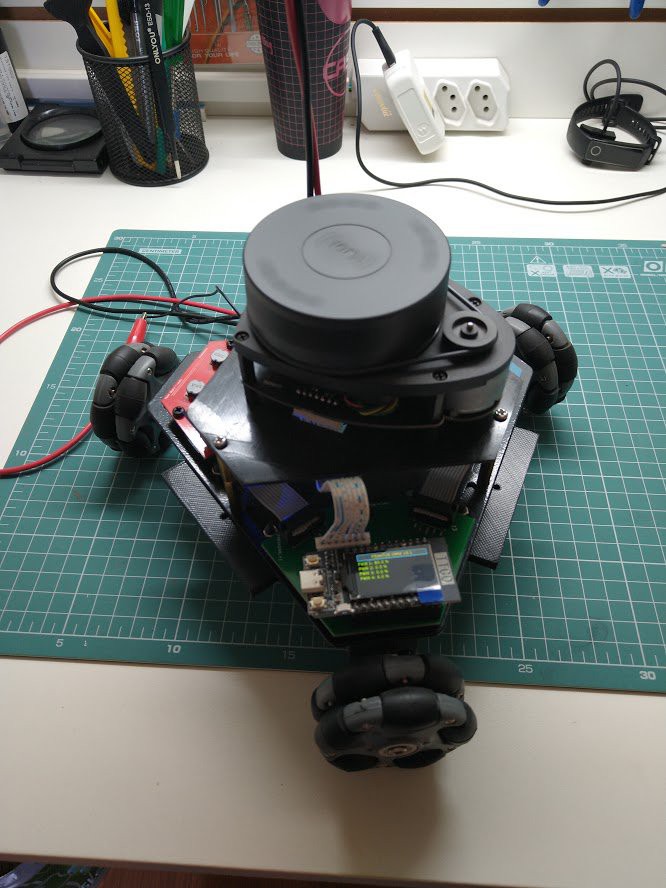
iOmni, is an autonomous (eventually) robot with Lidar to be used as a security system
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Slowly I will better detail the project and next step, for now there is a TODO in the project page in github
base_v37.step3D model of primitus omnistep - 3.74 MB - 06/27/2020 at 22:03 |
|
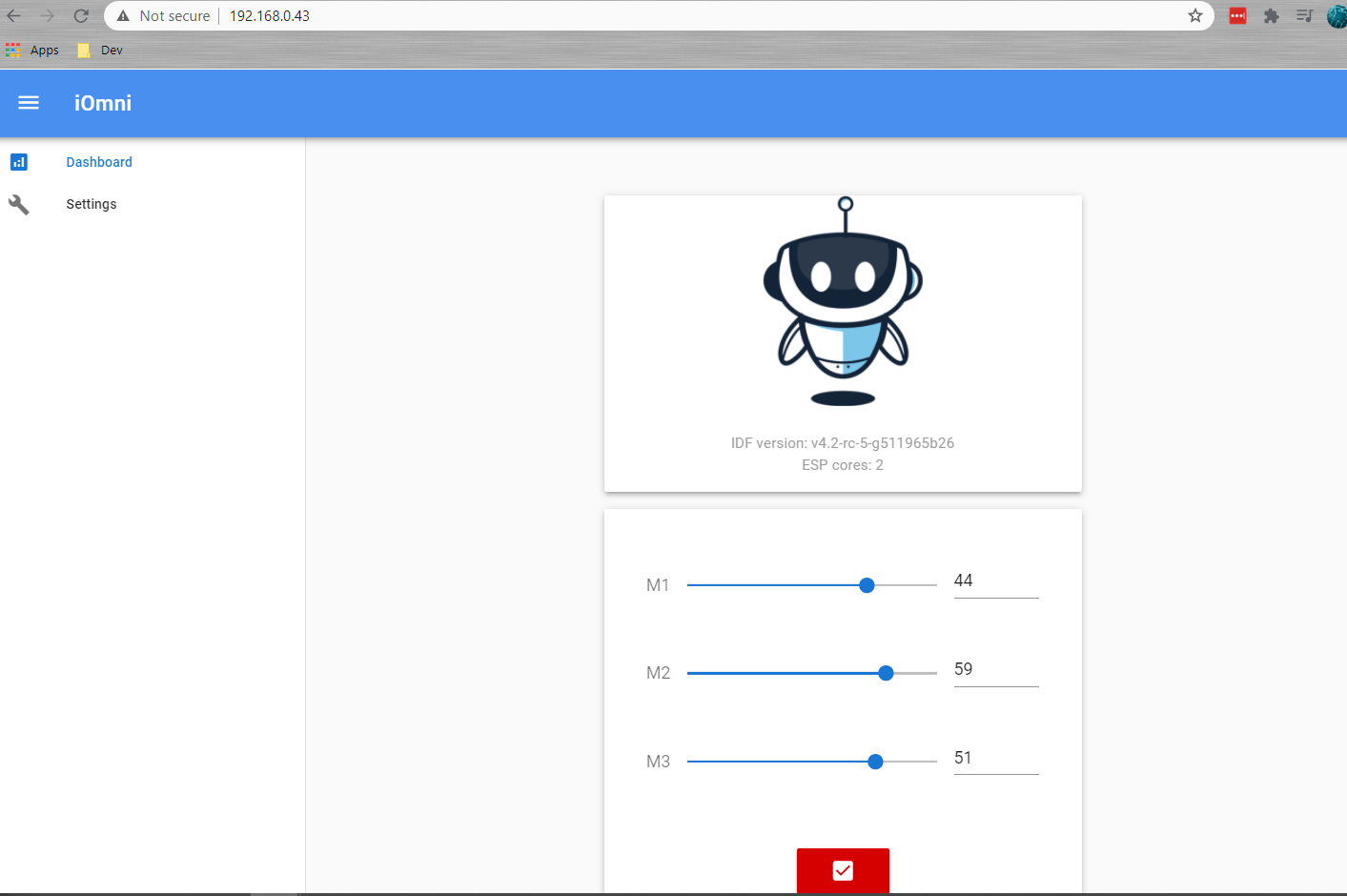
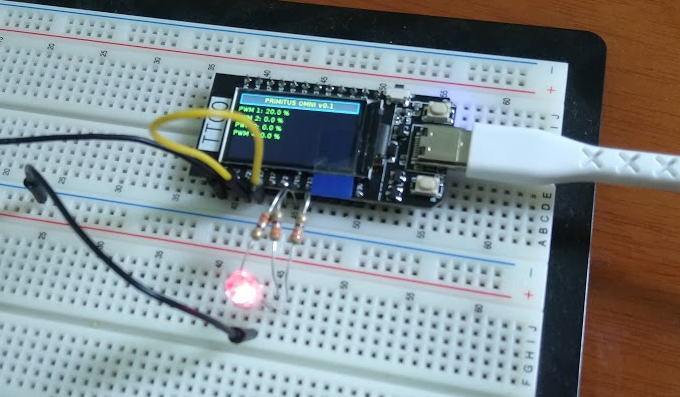
To help in the developmento of the project I added a simple dashboard in the ESP (based on Vue JS) to help control the robot and be able to see the stats of the robot.
For now is only implemented a card to send the motor speed, however it can be added new card to display any information from the robot, as more information is needed I will add other cards.
Also the web app will be use in the future to send an image using OTA (that is the purpose of the "settings" page which for now doesn´t have anything).
One of the great things about using Vue (with vuetify) is the the webpage is responsive and works great either in a PC as a mobile.
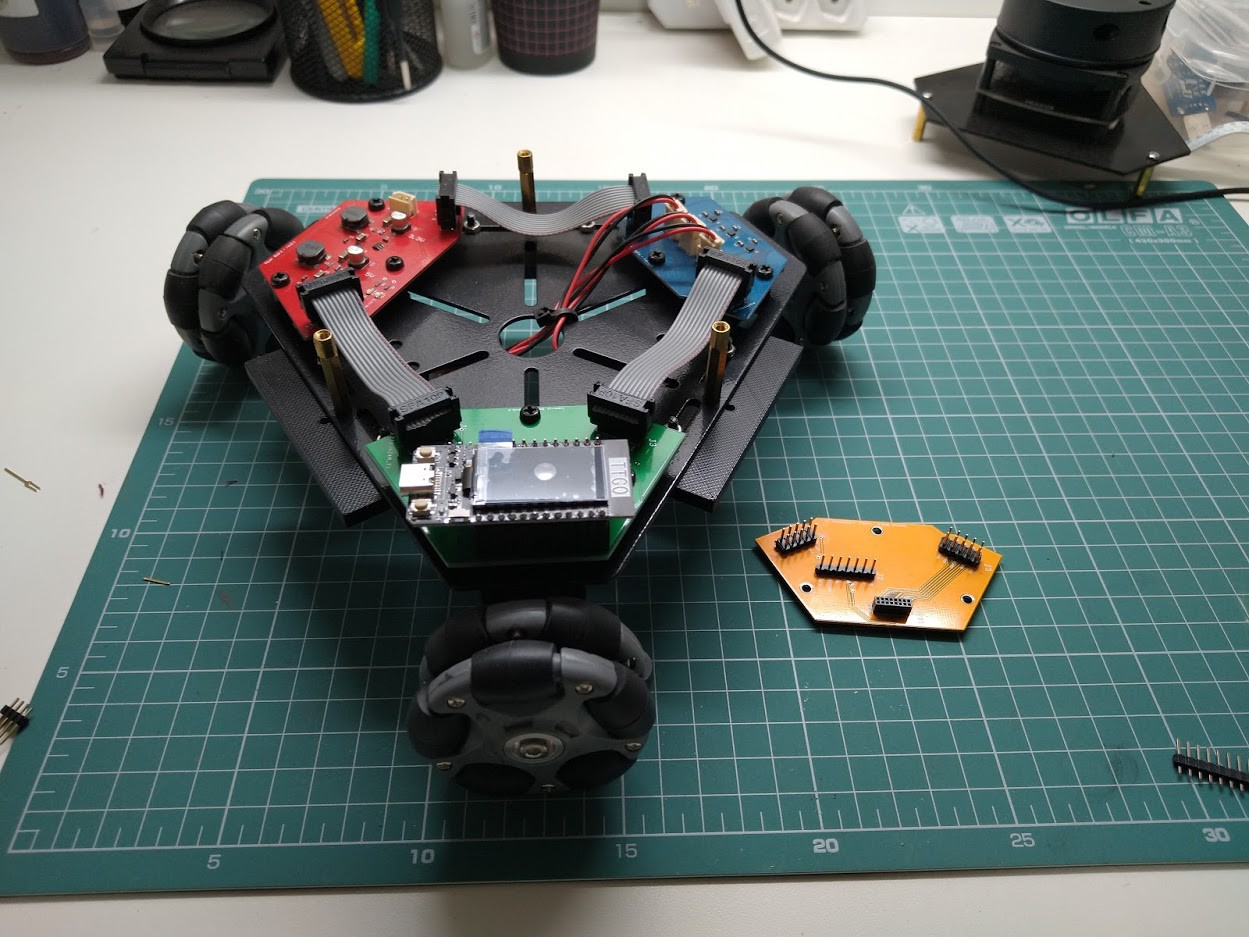
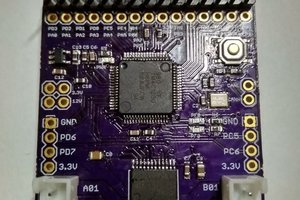
The new control board rev0.2 arrived!!! All the components were soldered and the new board was tested in the robot.
This new board will speed the development since the lidar, ESP and motor have different voltages, so with this boars is possible to test and development directly in the robot.
With this upgrade all the logical and control board are done, the last hardware need it is the batterry control board, which if anyone could recommend any design I would much appreciated! (the plan is to use 3 series and 2 parallel, total of six batteries).
Finished tested all the hardware interface with the TTGO t-display board, and send the pcb to manufacture.
Now I start to develop the code to interface with de Lidar. To help coding I solder a simple board to interface the Lidar with ttgo, tested the pwm which works fines, for next few days I will work on implementing the protocol for the lidar.
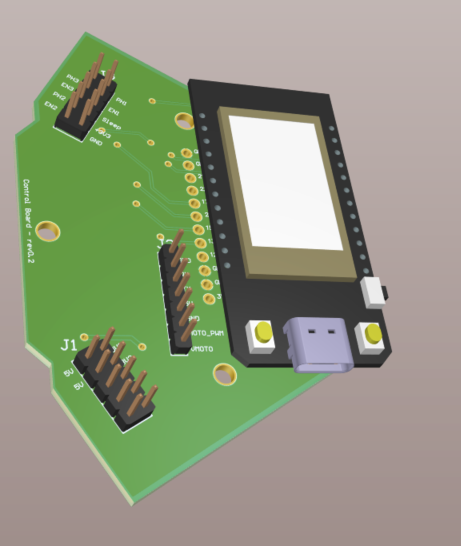
Currently I am on the stage of upgranding the control board to use the TTGO t-display board, which has an integrated display which will help in the development of the prject and also is a cheap and easily available board.
Yesterday I finished the board v0.2 with TTGO:
And in parrelel I am testing all the interface with the other parts of the robot before sending to manufactured (GPIO, PWM, UART).
The pcb files are already available in github:
https://github.com/LeandroTE/OmniHardware


Hello Dan, it actually works very nice, this configuration gives a lot of degree of freedom and also help a lot in the programming because is very easy to use both polar and cartesian coordinates, there is a nice video explain the how the motion works

 Ben Lim
Ben Lim
 Jaap
Jaap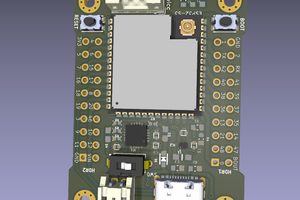
 Holotype Robotics
Holotype Robotics
 Samuk
Samuk
Interesting design. How well do omniwheels work in a three-axle configuration like that? I'd think it would be difficult to travel in straight lines.