 Samuk
Samuk
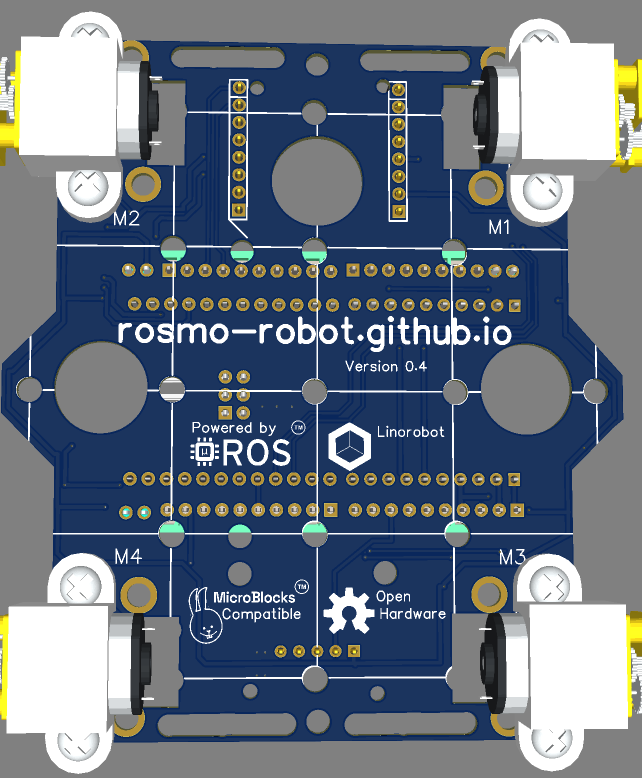
A Open-hardware micro-robot for ROS2 that can be assembled without soldering, or access to a 3D printer.
Built using affordable components available worldwide. For hobbyists, universities, R&D. https://rosmo-robot.github.io/
Modular open hardware robot for uROS2 & Microblocks
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
A Open-hardware micro-robot for ROS2 that can be assembled without soldering, or access to a 3D printer.
Built using affordable components available worldwide. For hobbyists, universities, R&D. https://rosmo-robot.github.io/
One more final test and I'll sell some of these little bots. If you fancy one please sign up for the Tindie Waitlist so I know how many to make
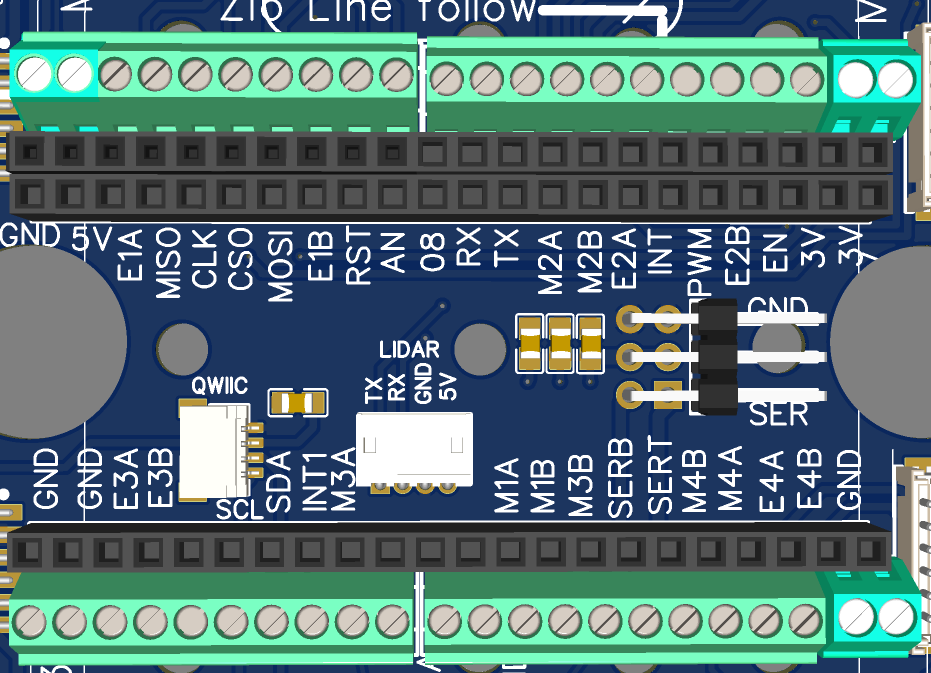
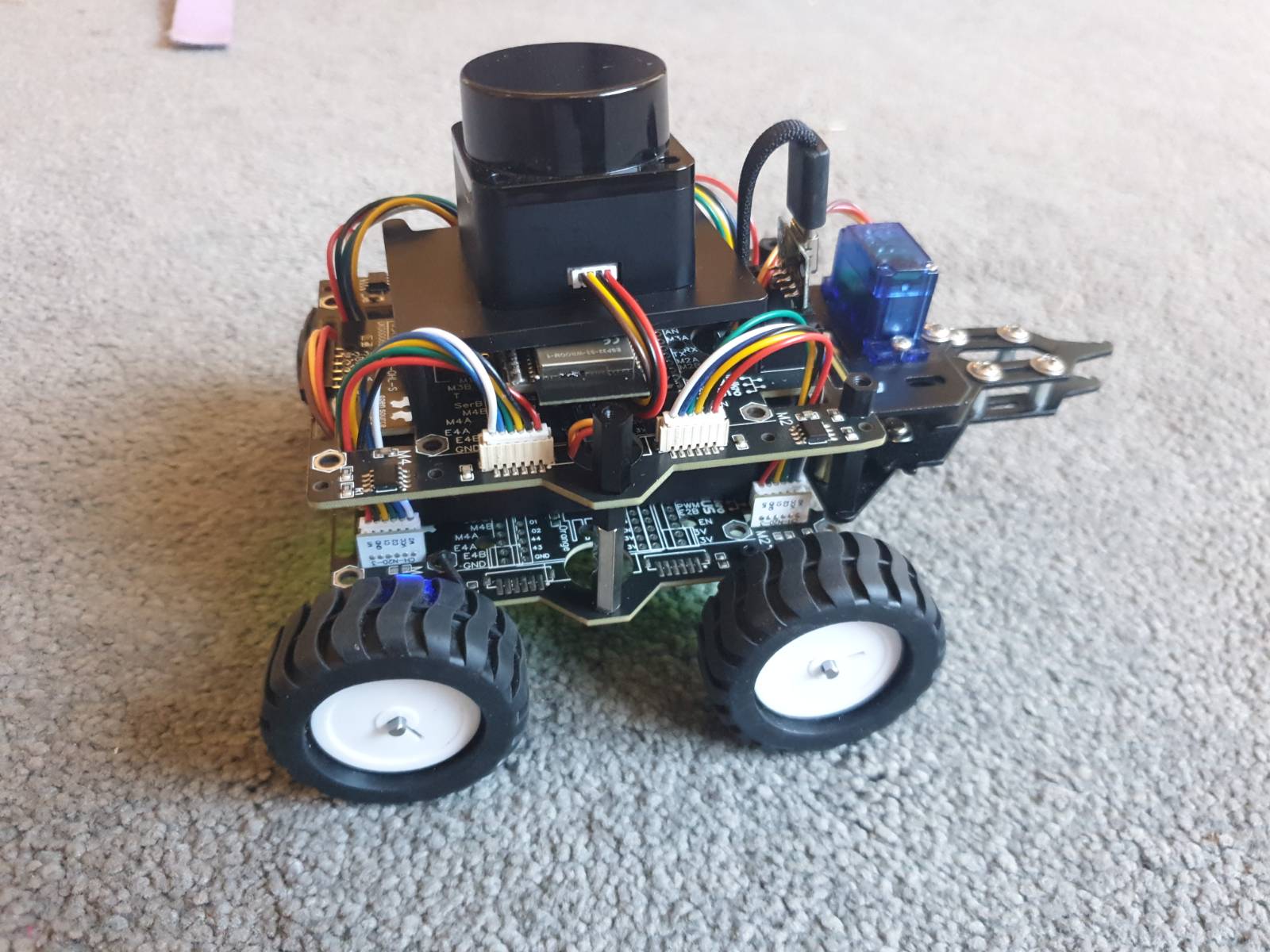
I added a header for the Lidar sensor I'm not sure if the new £45 one will work with ROS2 yet, but the pinout seems to be the same as the older £69 ones so I stuck one on for covenience
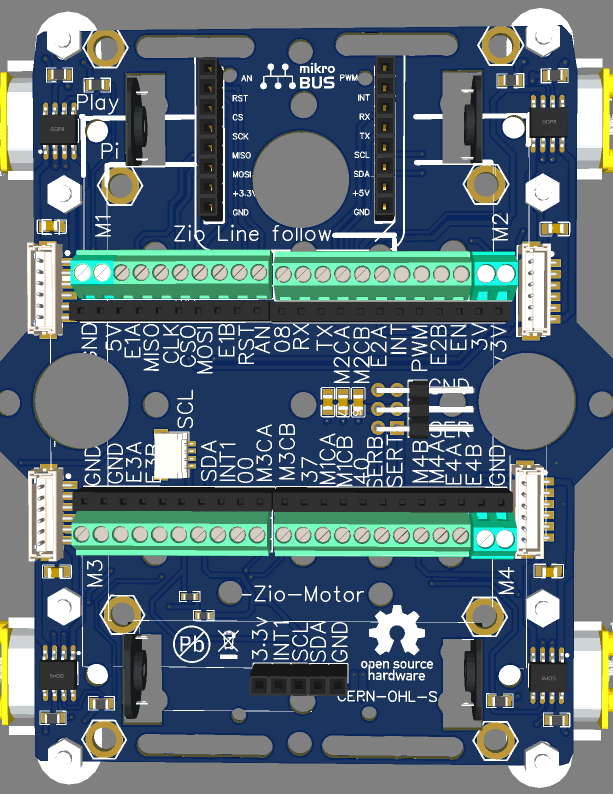
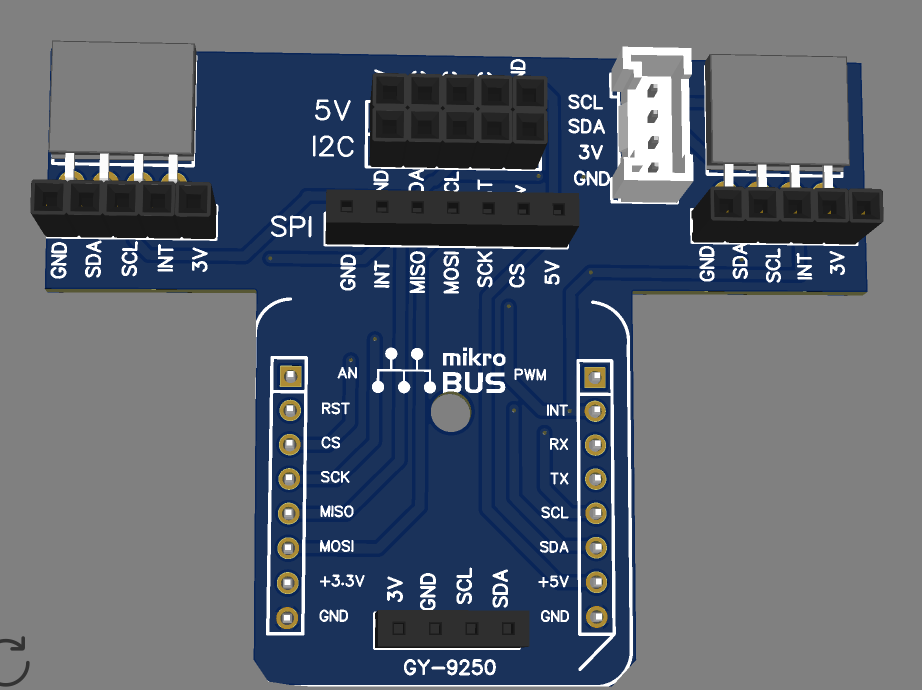
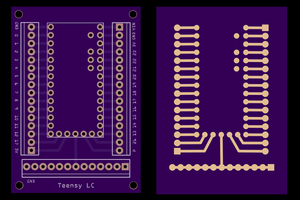
I finished* routing the 'main' breakout board
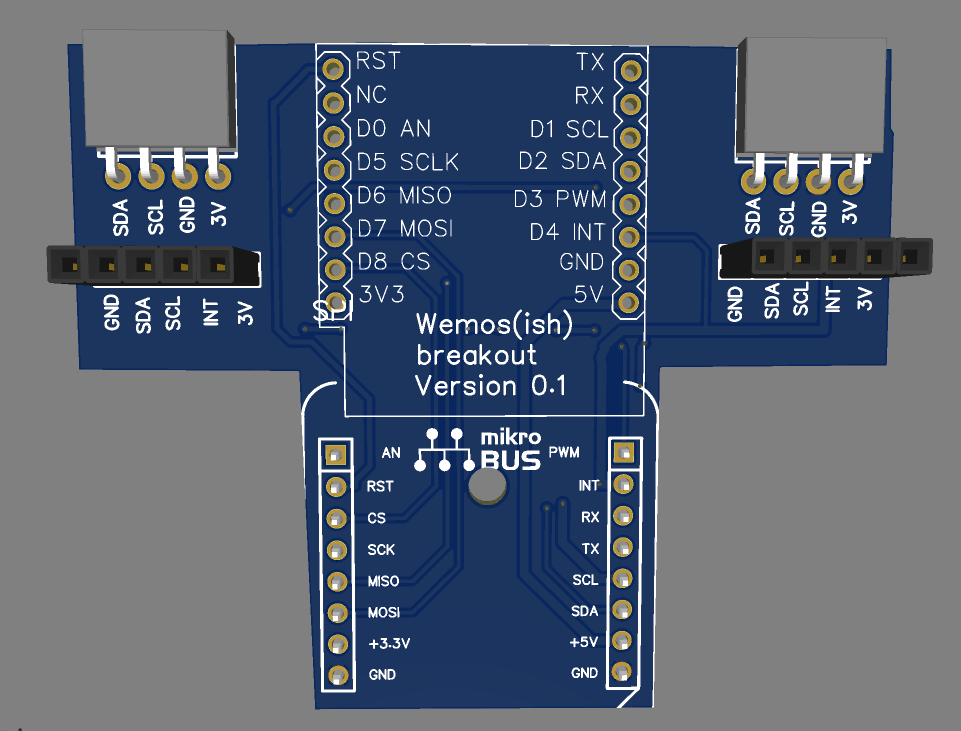
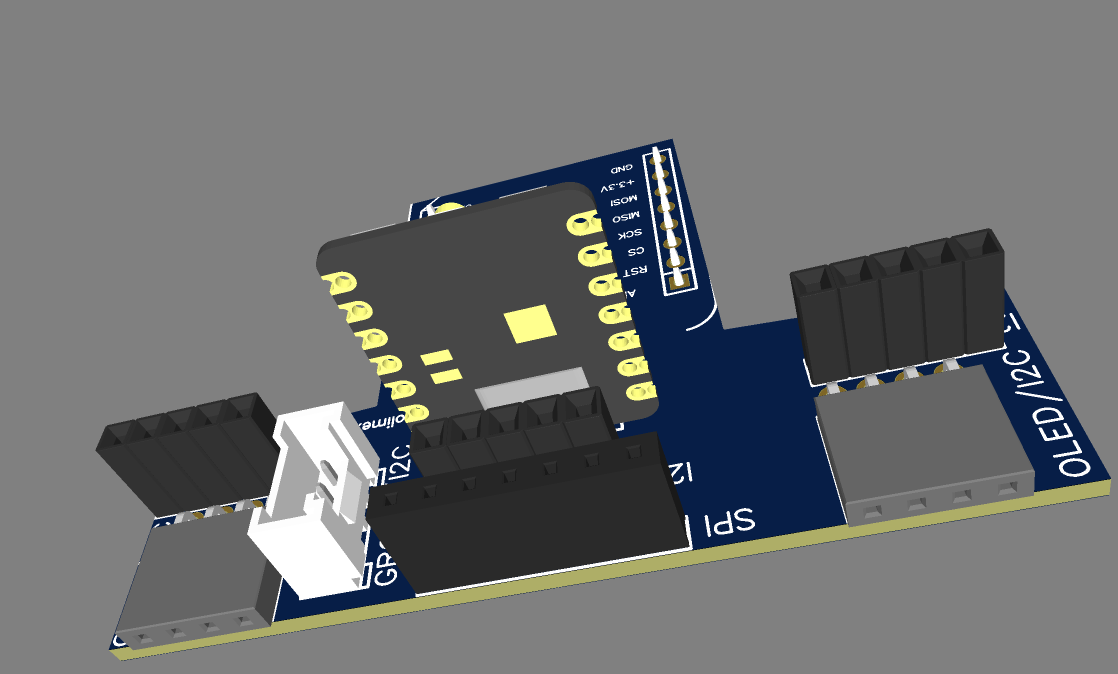
I also did one with a Wemos(ish) footprint
Both of these are designed to connect to the Mikrobus header on https://rosmo-robot.github.io/
* It's not actually finished, I just haven't spotted the errors yet
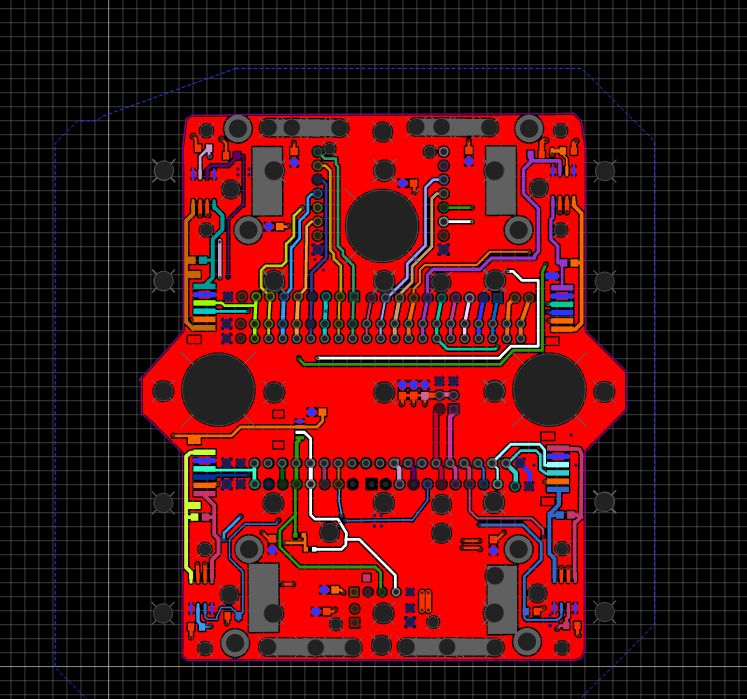
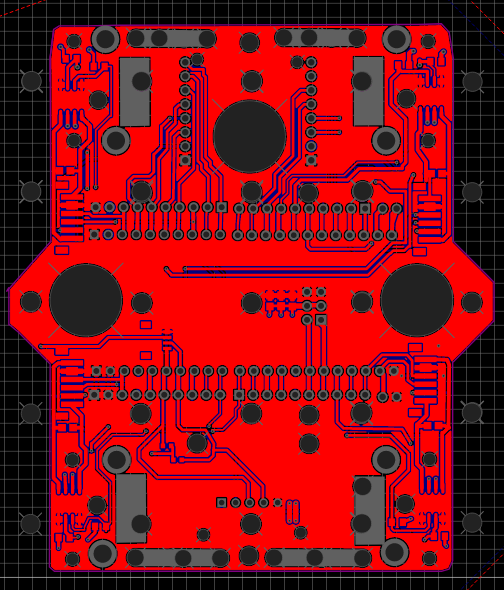
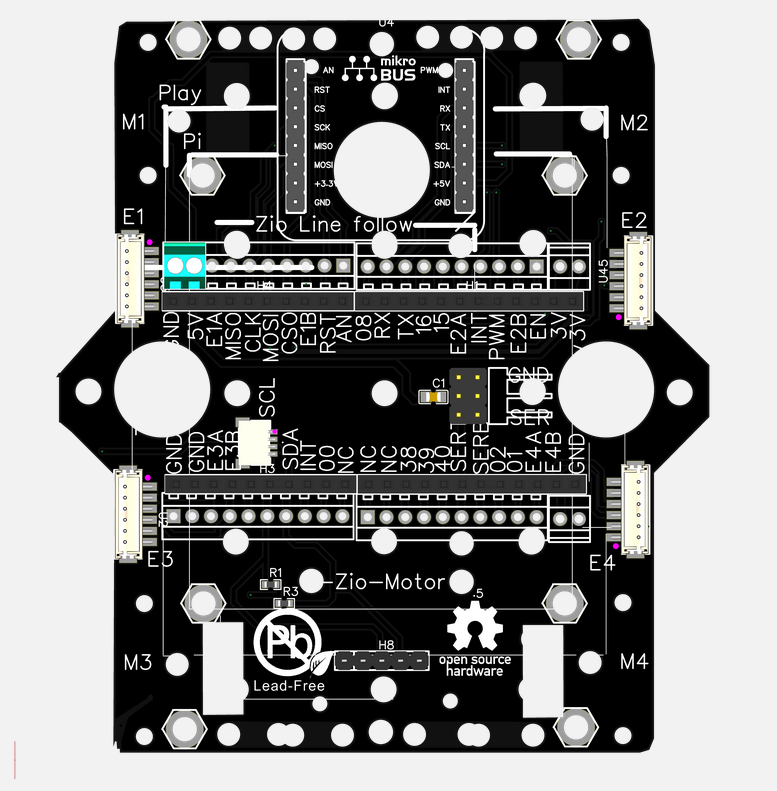
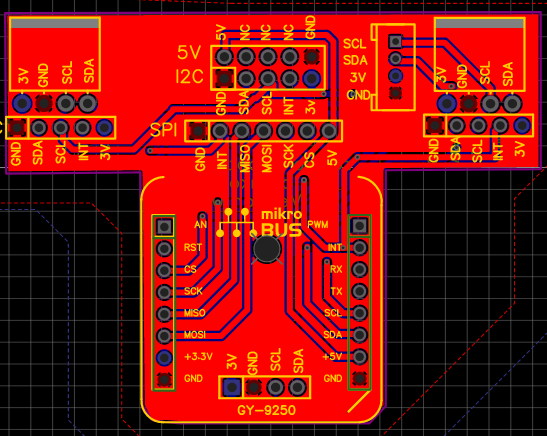
I spotted a ground island in the PCB so did yet another iteration
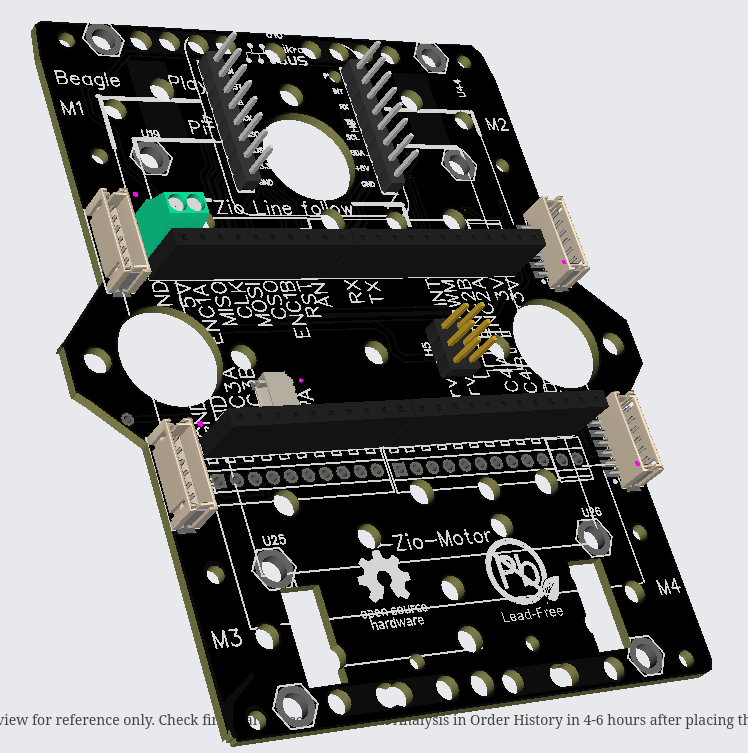
Did a bit of work on a version with on-board L9110S motor drivers, you can find that here it's currently untested, but I'll try it soon
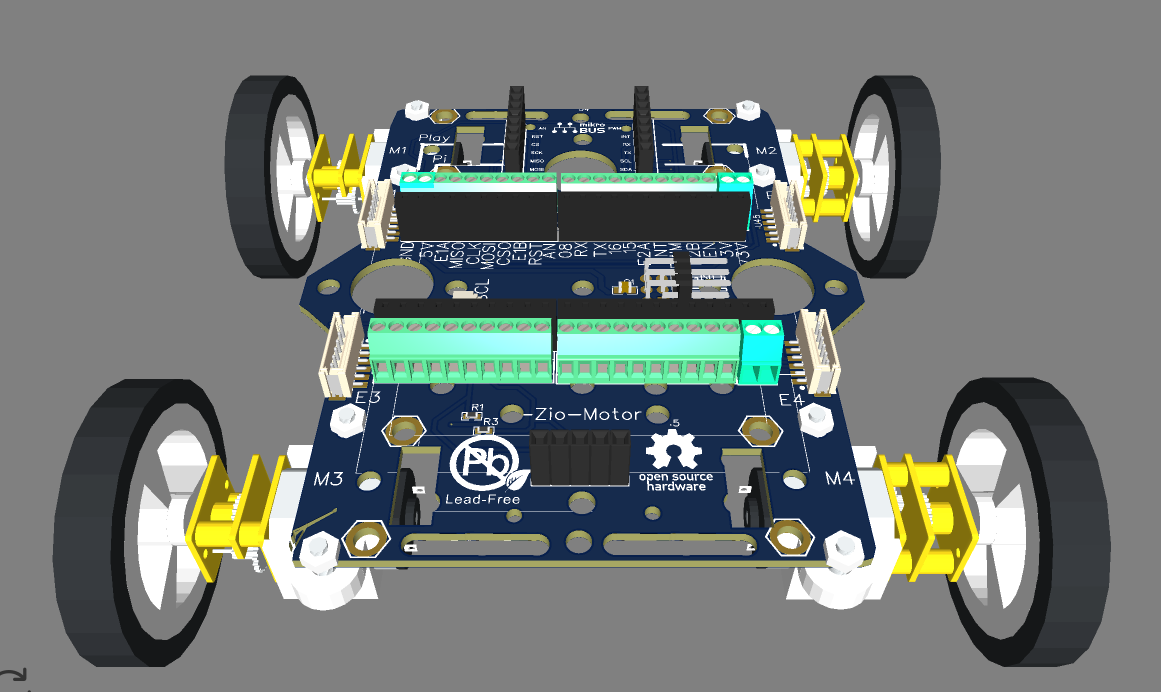
I've just ordered a PCB that I'm hopeful will be a 'Version 1' https://rosmo-robot.github.io that I'll offer for sale on Lectronz.
This will support Microblocks Teleop from an Android app and also ROS2 Teleop from a browser.
There's a bunch of further software stuff that I'd like to get done 'at some point' I thought it would be good to write down some of these ideas to help potential collaborators jump into a bit of the project that's interesting to them.
ROS2 tasks
Microblocks tasks
Hardware tasks
Organisation/documentation tasks
Arduino tasks
Micropython tasks
If you'd like to get involved in any of that you could join the project team here, or chat to me on Twitter
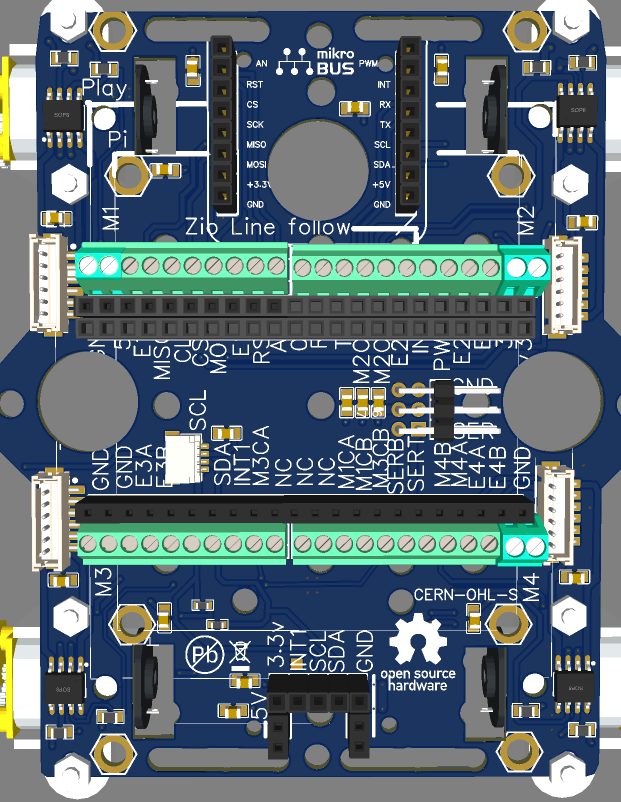
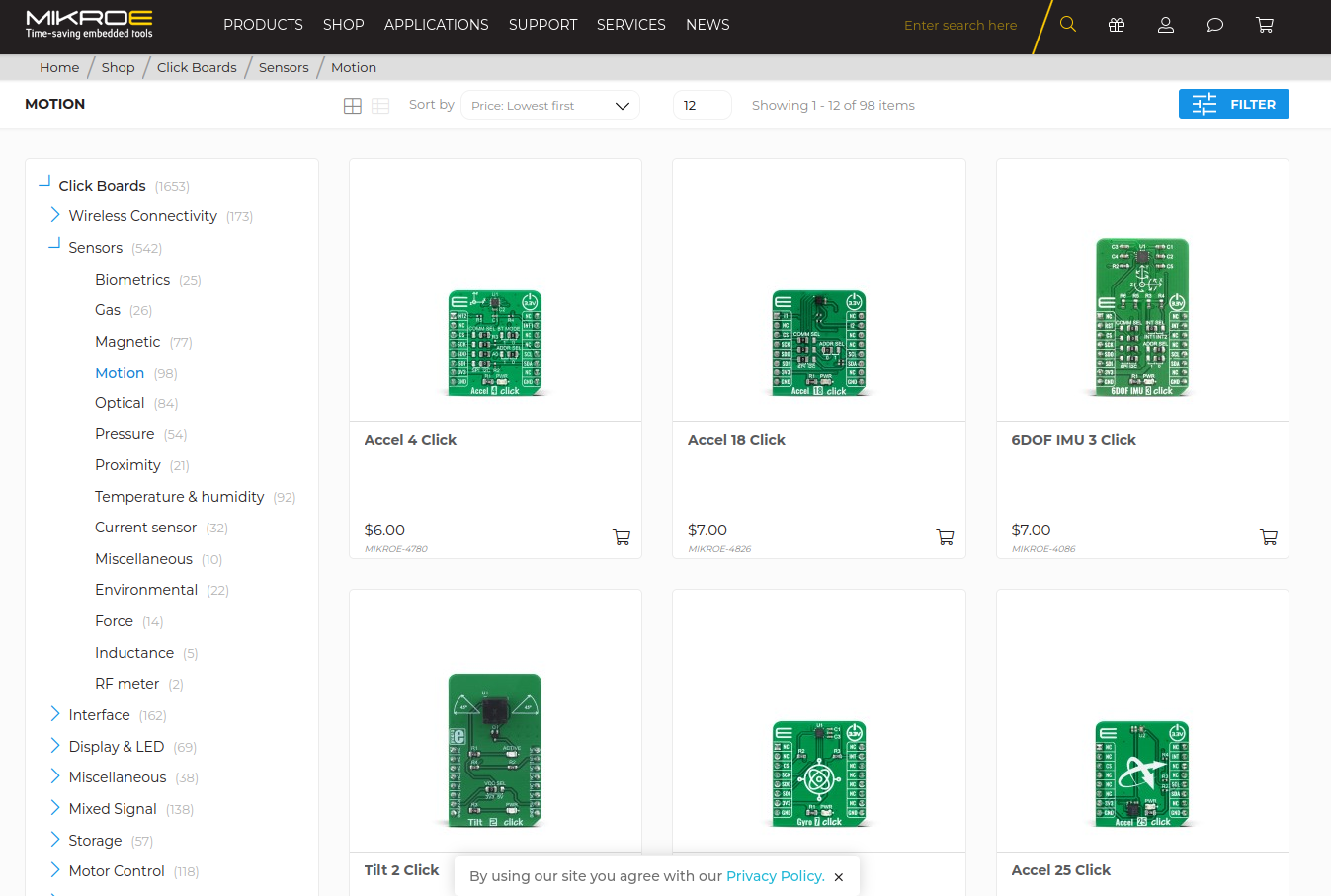
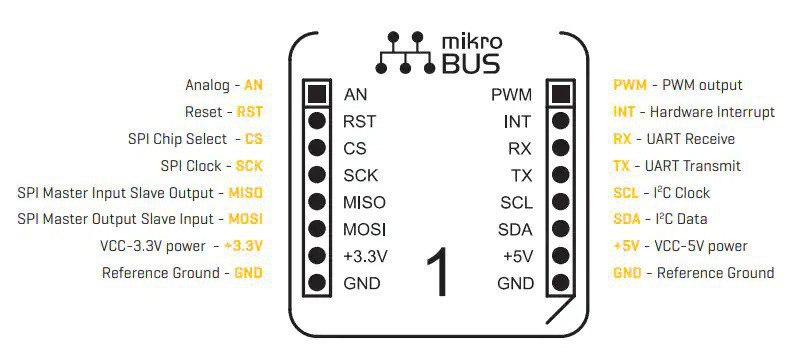
At one end of https://rosmo-robot.github.io/ you'll spot a MikroBUS expansion header, the thinking with this is that this gives access to the ~1200 official MikroBus click boards
There is also scope for people to make expansion boards based on the very useful pinout.
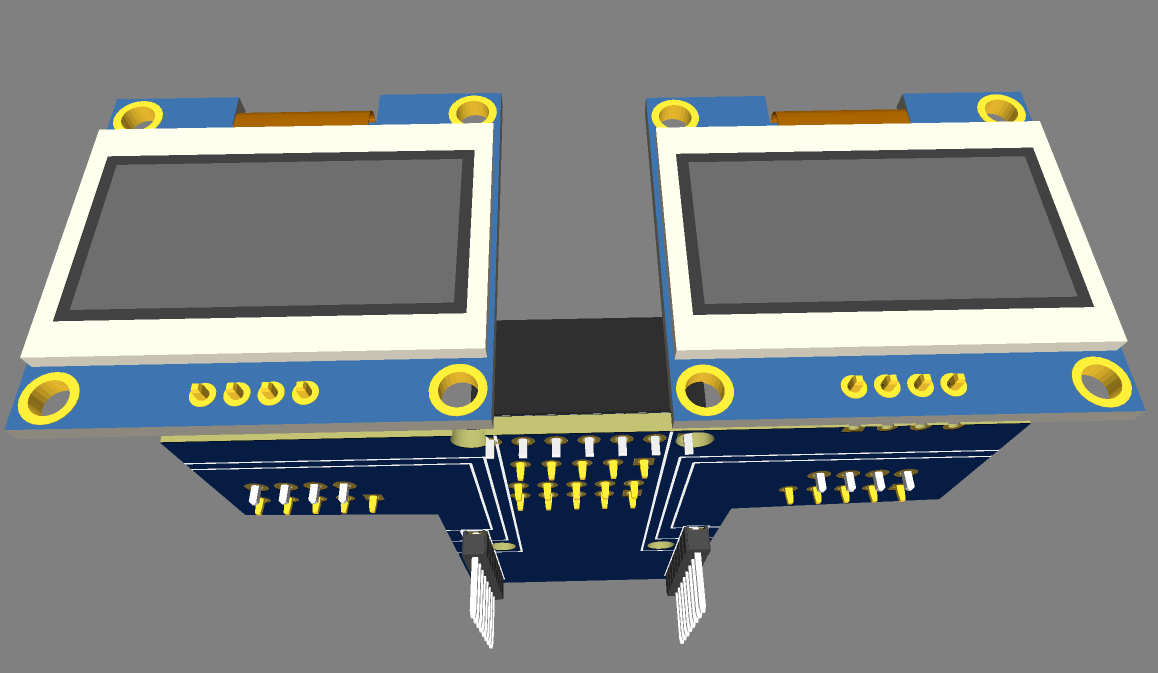
I started having a play with one today, tackling the all important question of how to give this robot silly eyes.
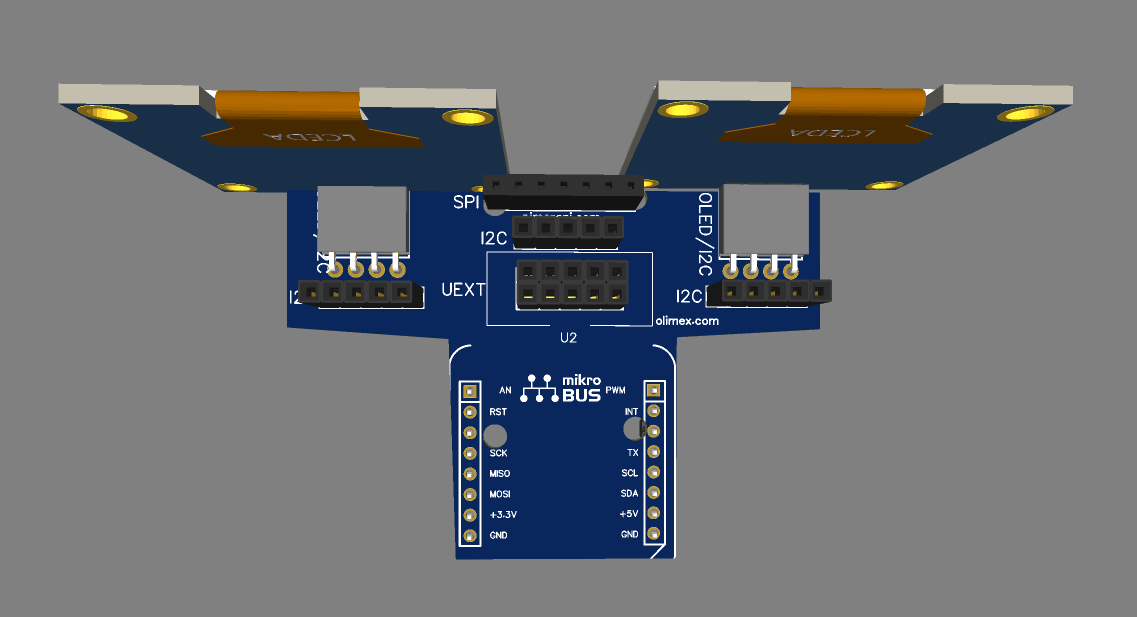
In the image below you'll see a bunch of interfaces;
The MikroBus header compliments the on-board Qwiic and I2C breakout garden header as an attempt to navigate the I2C Zoo maybe I should stick a Grove on the breakout board to complete the menagerie..
This variant adds a Grove & Xiao camera for on board image processing
Did some more edits on the PCB, including adding an additional I2C breakout header, I chose the Breakout garden pin order for this header.
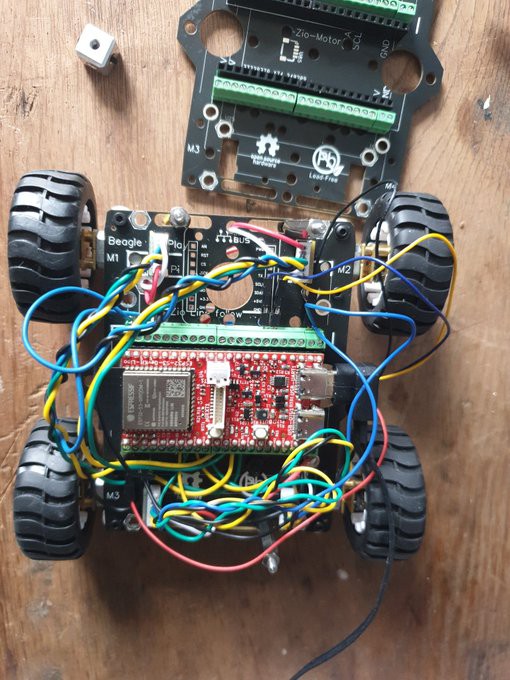
Having a bunch of encoder cabling is quite messy, It is functional but also fiddly to connect. I've almost finished a version that includes pluggable motor sockets to make the cable connection easier and less error prone


 Pete Prodoehl
Pete Prodoehl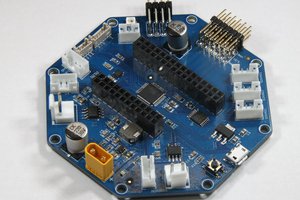

 Endbots
Endbots
 Salah Missri
Salah Missri