Samuk
Samuk-
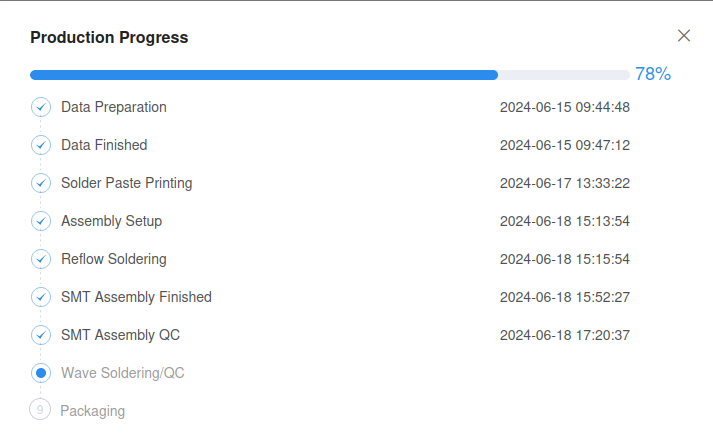
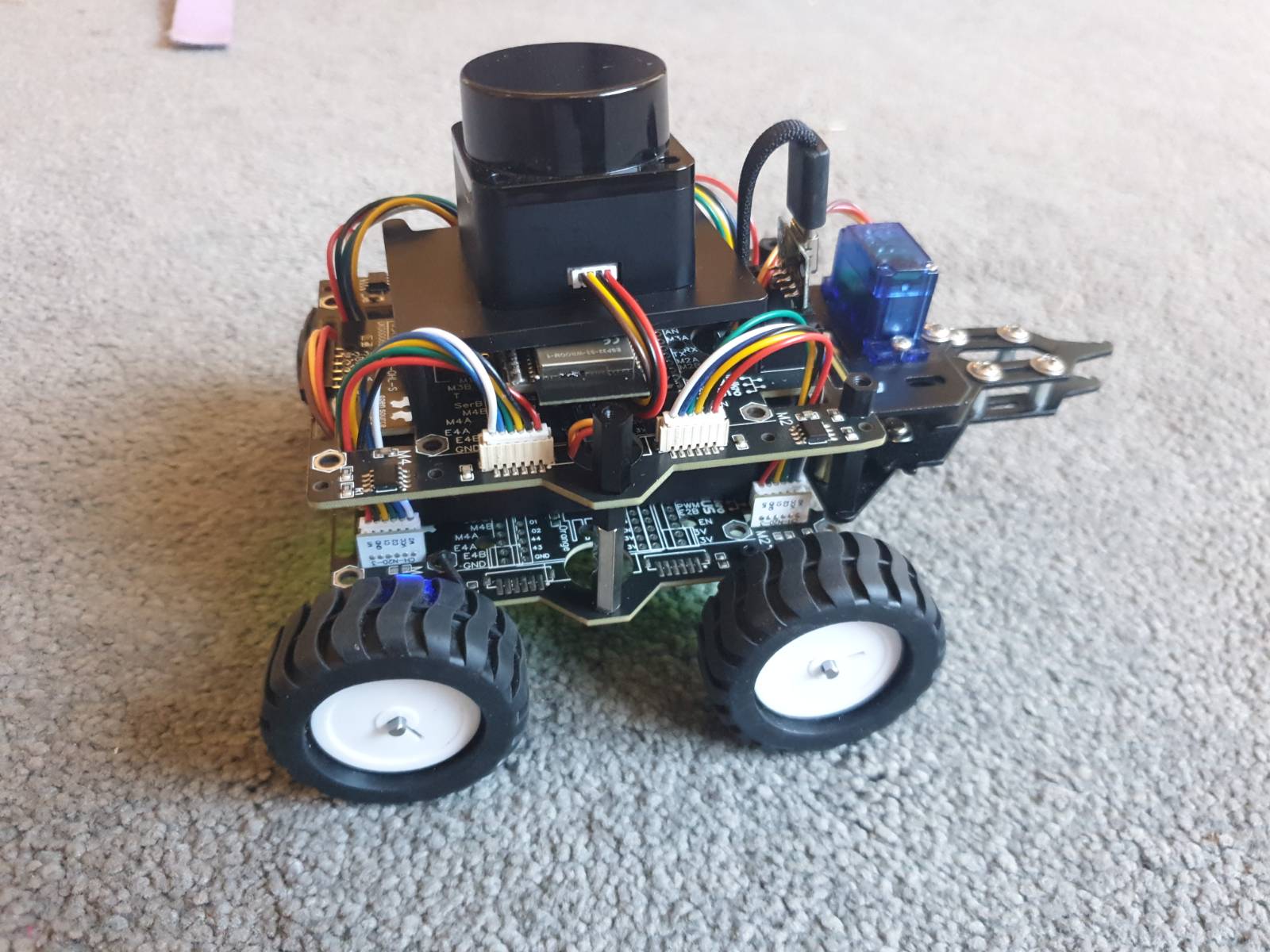
Final testing & Production
06/18/2024 at 17:46 • 0 comments![]()
One more final test and I'll sell some of these little bots. If you fancy one please sign up for the Tindie Waitlist so I know how many to make -
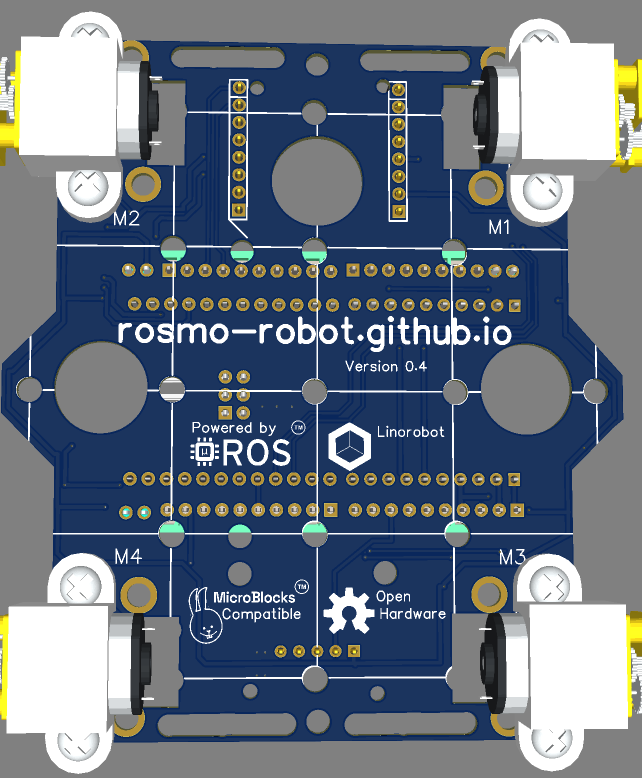
Microblocks & Mecanum working
06/13/2024 at 18:56 • 0 comments -
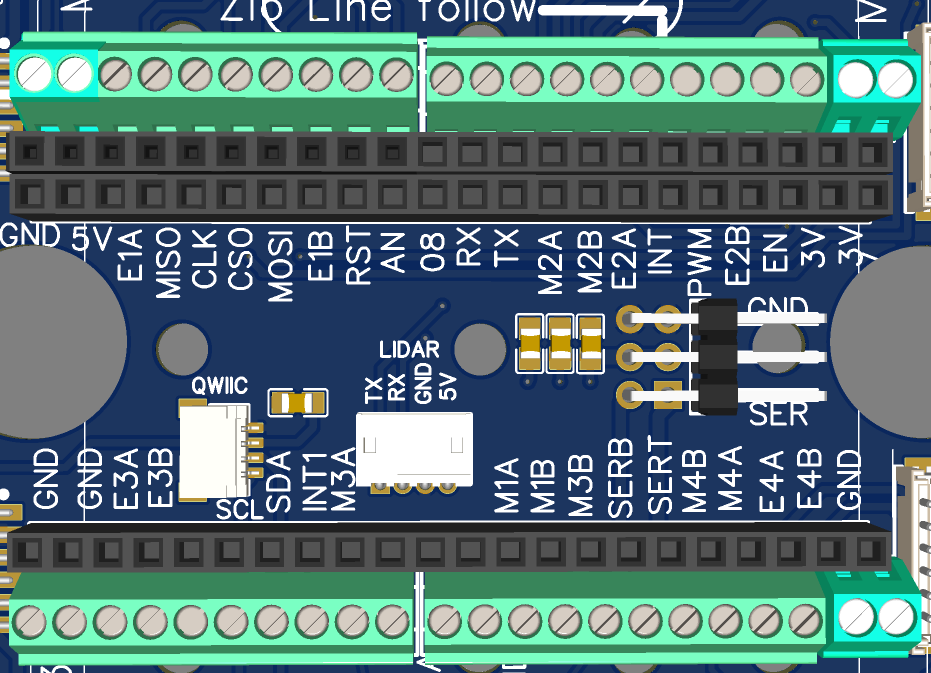
Lidar header
04/08/2024 at 17:53 • 0 comments![]()
I added a header for the Lidar sensor I'm not sure if the new £45 one will work with ROS2 yet, but the pinout seems to be the same as the older £69 ones so I stuck one on for covenience
-
New breakout boards
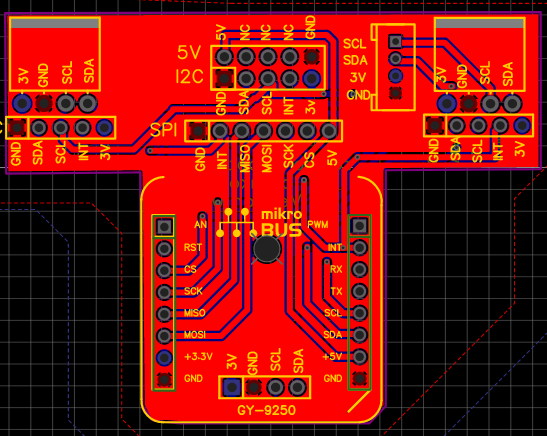
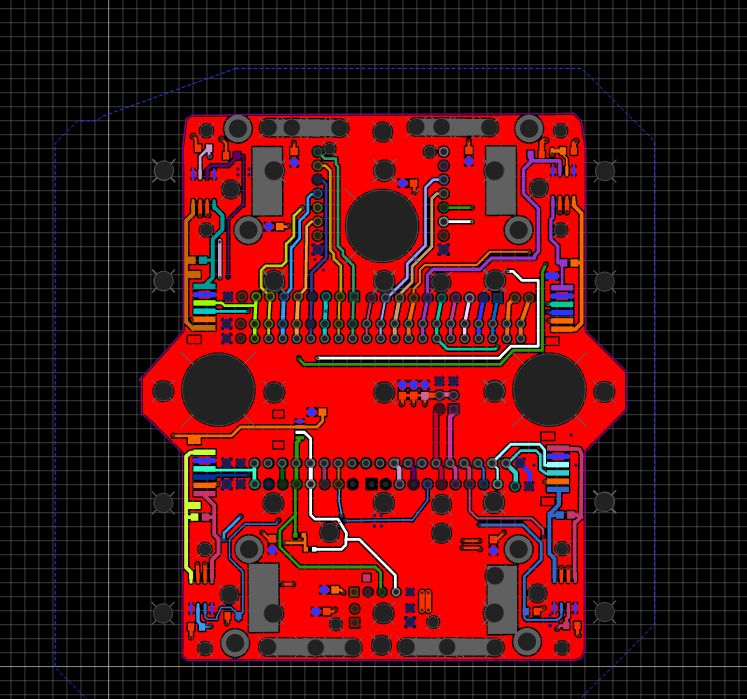
04/04/2024 at 23:15 • 0 commentsI finished* routing the 'main' breakout board
![]()
![]()
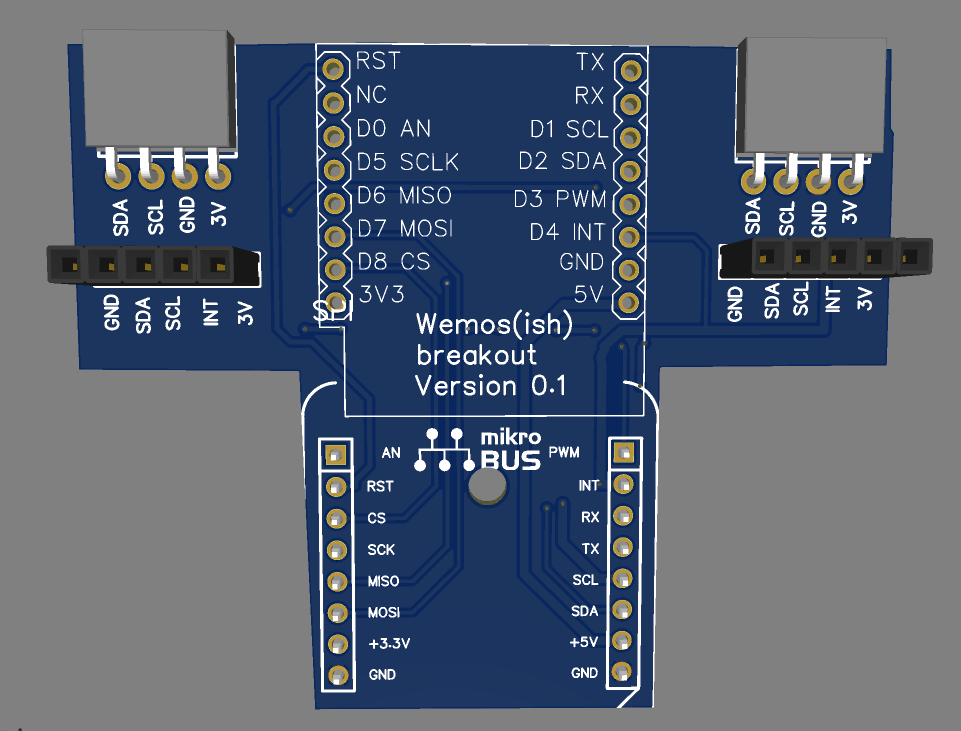
I also did one with a Wemos(ish) footprint
![]()
Both of these are designed to connect to the Mikrobus header on https://rosmo-robot.github.io/
* It's not actually finished, I just haven't spotted the errors yet
-
Xiao-S3 camera mount & less ground islands
04/01/2024 at 21:53 • 0 comments![]()
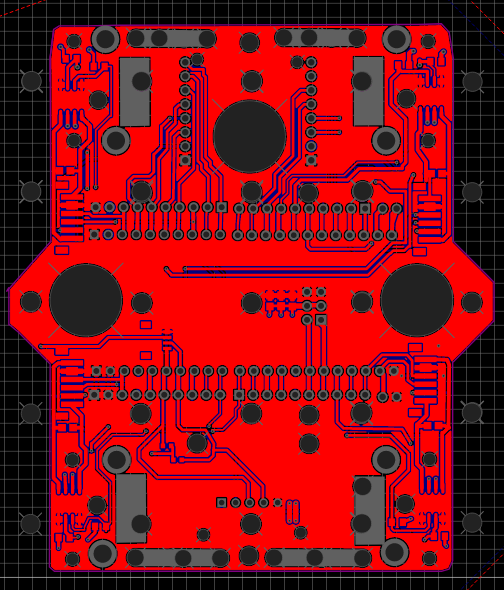
I spotted a ground island in the PCB so did yet another iteration- Ground islands (hopefully!) removed
- Added a bunch of capacitors to smooth out the power
- Added a 5v header (bottom of the PCB) So you could plug in one of these USB-C connectors the idea is you could then add a USB powered Wifi/ AI camera
- Added extra female header so you could now use the Open hardware ESP32-S3 or the closed hardware ones that are a bit cheaper
- Bottom silkscreen tidied up a bit
- More: rosmo-robot.github.io/
![]()
-
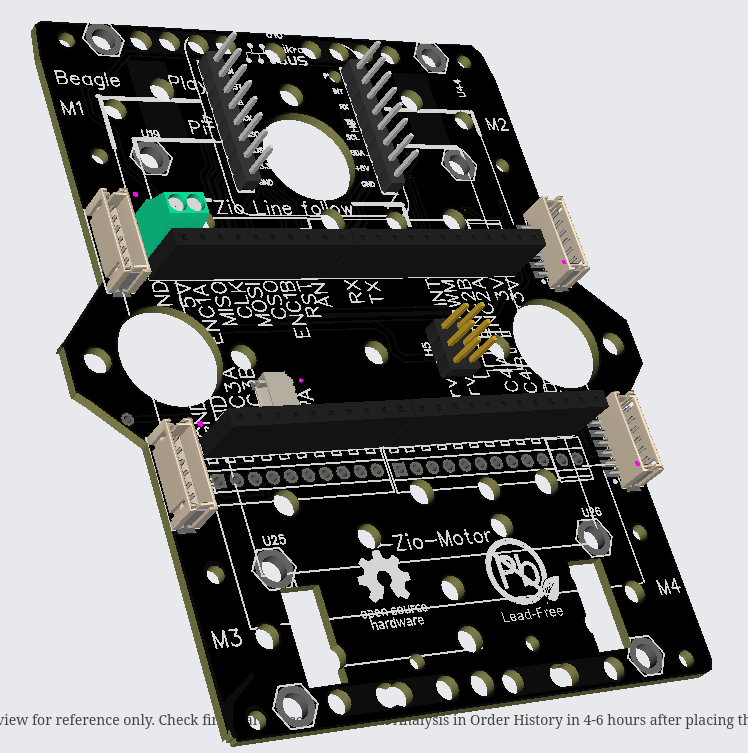
Onboard motor drivers
03/14/2024 at 22:16 • 0 comments![]()
![]()
![]()
Did a bit of work on a version with on-board L9110S motor drivers, you can find that here it's currently untested, but I'll try it soon -
Version 1.0 approaches? Stuff to do, looking for collaborators
03/06/2024 at 09:57 • 0 comments![]()
I've just ordered a PCB that I'm hopeful will be a 'Version 1' https://rosmo-robot.github.io that I'll offer for sale on Lectronz.
This will support Microblocks Teleop from an Android app and also ROS2 Teleop from a browser.
There's a bunch of further software stuff that I'd like to get done 'at some point' I thought it would be good to write down some of these ideas to help potential collaborators jump into a bit of the project that's interesting to them.
ROS2 tasks
- Create a URDF file for simulation
- Confirm the Lidar to be working
- Confirm IMU working
- Confirm Mecanum drive working
- Configure Foxlglove studio
- Create up to date Virtualbox image of ROS2 install
- Use BeagleboardY-AY for on-board compute/ vision processing
- Create Docker image of ROS2 install
Microblocks tasks- Confirm Ultrasonic working
- Confirm vl53l0x working
- Write autonomy sketch based on distance sensors
- Confirm OLED 'eyes' working
- Write 'eyes' sketch to give some personality
- Configure Android app to support voice control
- Configure Android app to have 'eyes' so phone can be robot-mounted
Hardware tasks
- Iterate on 'Rosmo' the 'daughterboard' & 'Medium' PCB
Organisation/documentation tasks
- Add photos to 'build' page & tweak wording
- Add PCB to Lectronz store
- Social media stuff, make some videos
Arduino tasks
- Do Arduino sketch based on Smartcar shield work
Micropython tasks
- Do alternate Micropython firmware
If you'd like to get involved in any of that you could join the project team here, or chat to me on Twitter
-
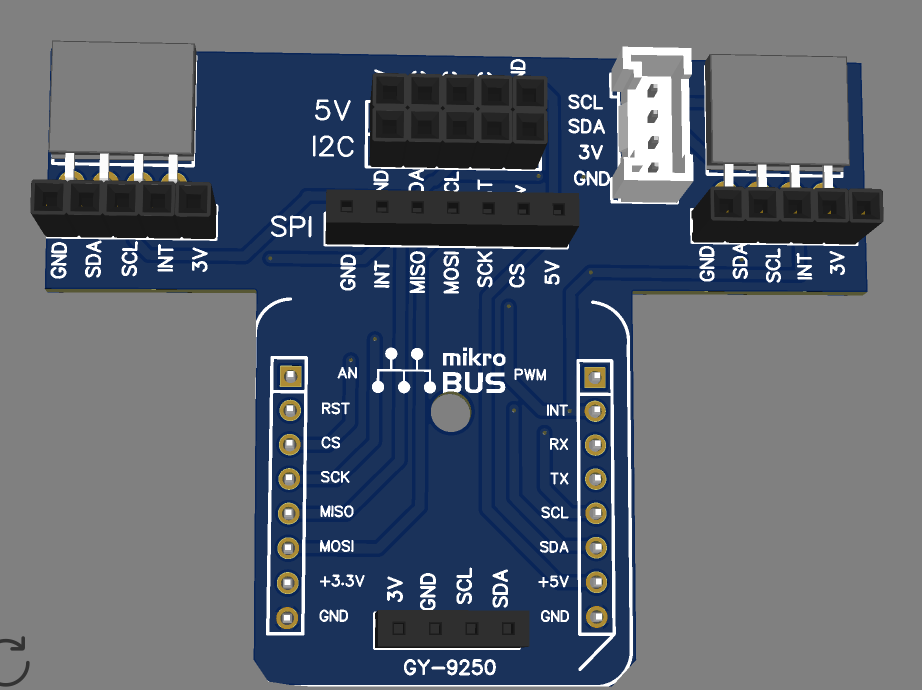
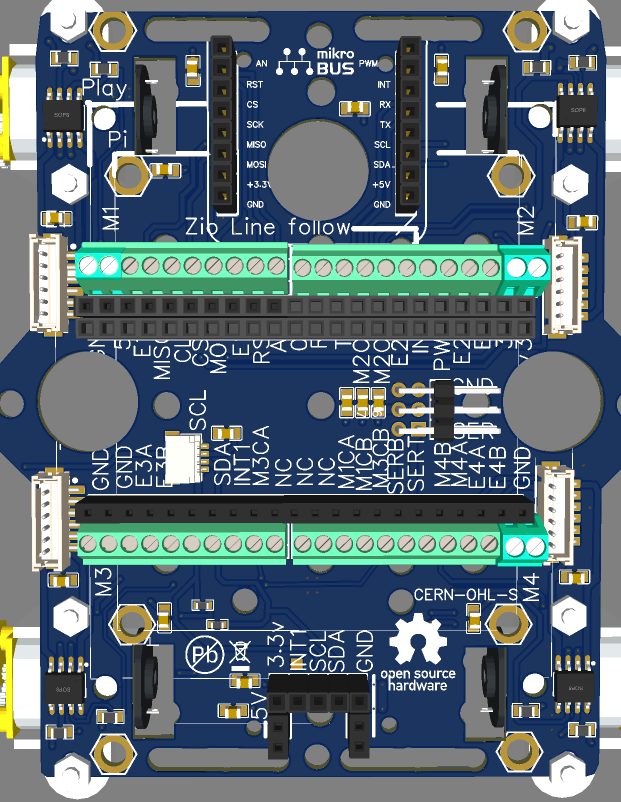
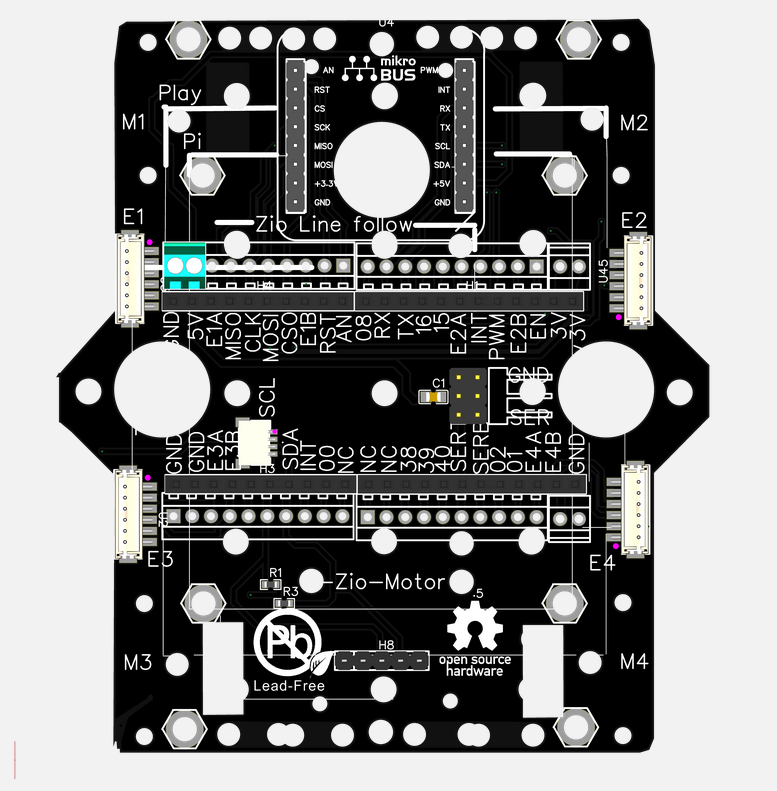
MikroBUS expansion
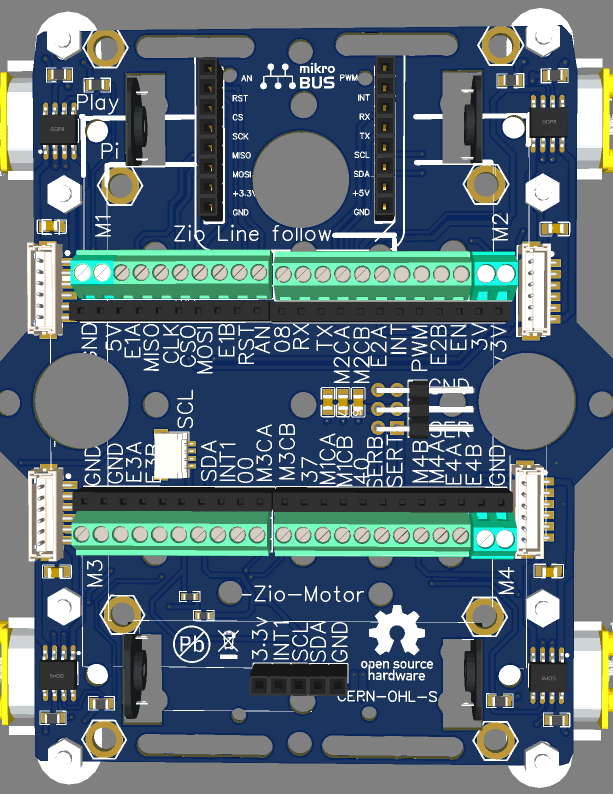
03/04/2024 at 14:30 • 0 commentsAt one end of https://rosmo-robot.github.io/ you'll spot a MikroBUS expansion header, the thinking with this is that this gives access to the ~1200 official MikroBus click boards
![]()
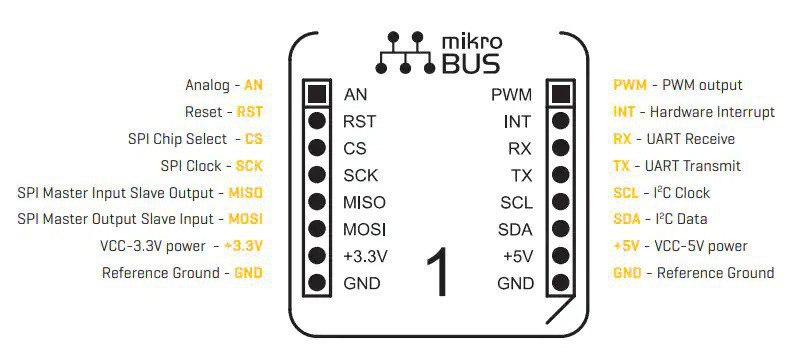
There is also scope for people to make expansion boards based on the very useful pinout.
![]()
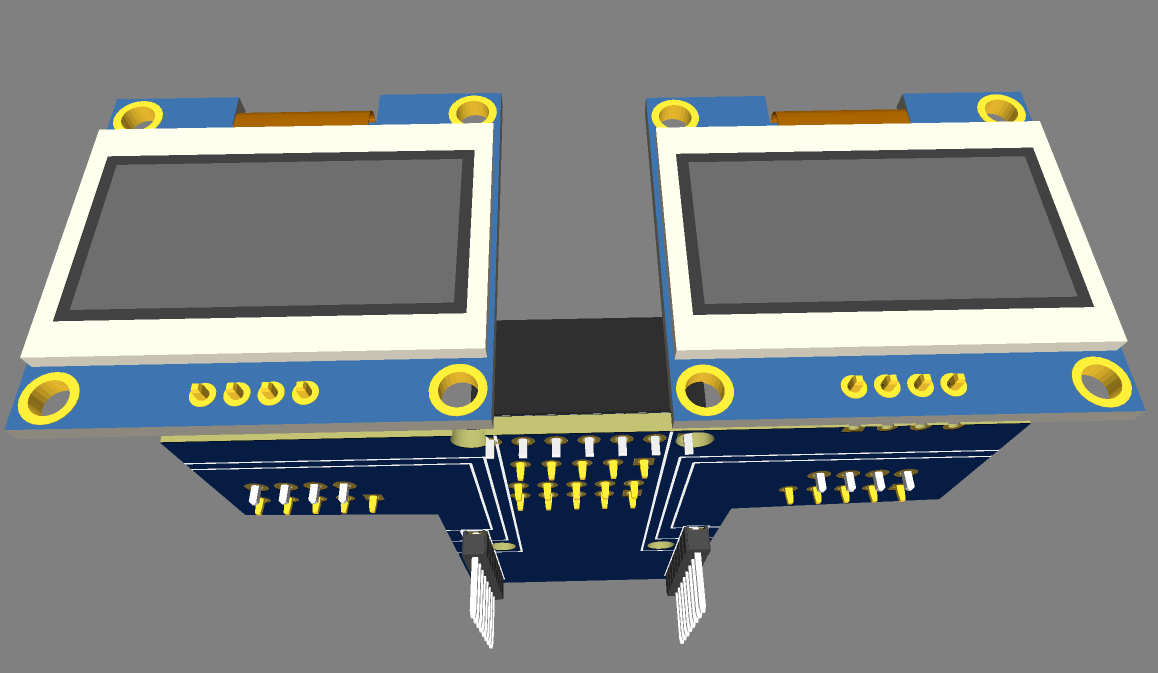
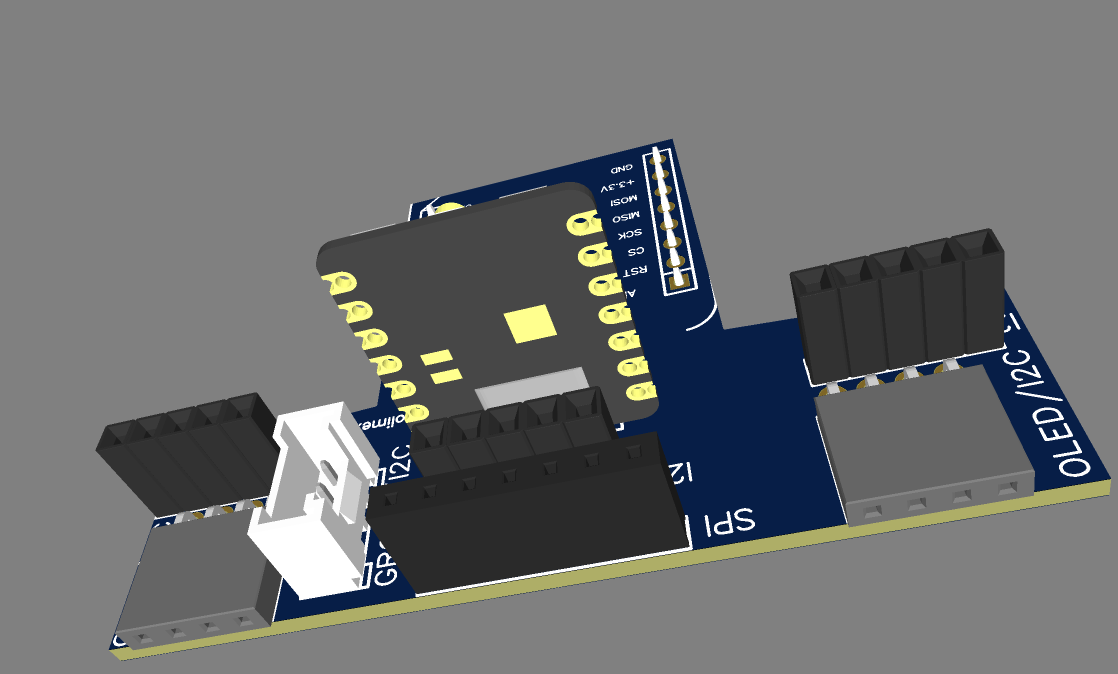
I started having a play with one today, tackling the all important question of how to give this robot silly eyes.
![]()
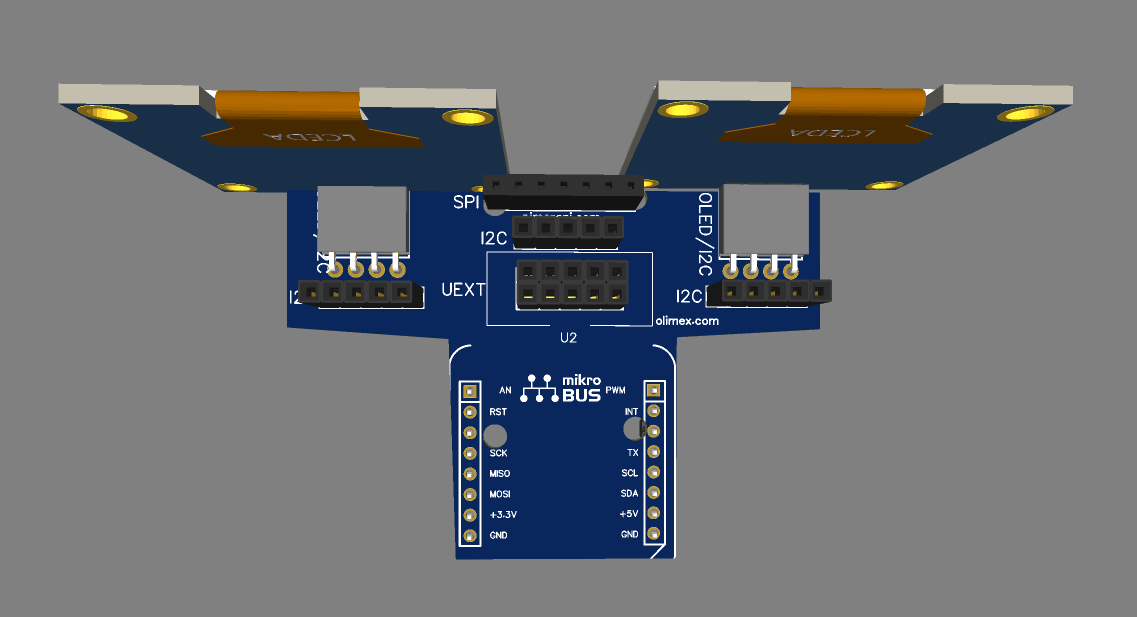
In the image below you'll see a bunch of interfaces;
- Pimoroni breakout garden I2C and SPI headers
- UEXT female header for the open hardware Olimex sensors
- Two I2C for the all important silly eyes OLED (haven't yet decided between the 1.3" or 1.5" pinout)
![]()
The MikroBus header compliments the on-board Qwiic and I2C breakout garden header as an attempt to navigate the I2C Zoo maybe I should stick a Grove on the breakout board to complete the menagerie..
![]()
This variant adds a Grove & Xiao camera for on board image processing
-
Breakout garden I2C
03/04/2024 at 09:44 • 0 comments![]()
Did some more edits on the PCB, including adding an additional I2C breakout header, I chose the Breakout garden pin order for this header.
- Female header would enable users to plug in either some straight or 90degree pins
- Alternately plug in a breakout garden socket
- Enables plugging in the I2C range of Breakout Garden components
- Also enables use of 4trionics ultrasonic sensor
- Alternately you could stick some Dupont cables into it if that's more your jam
-
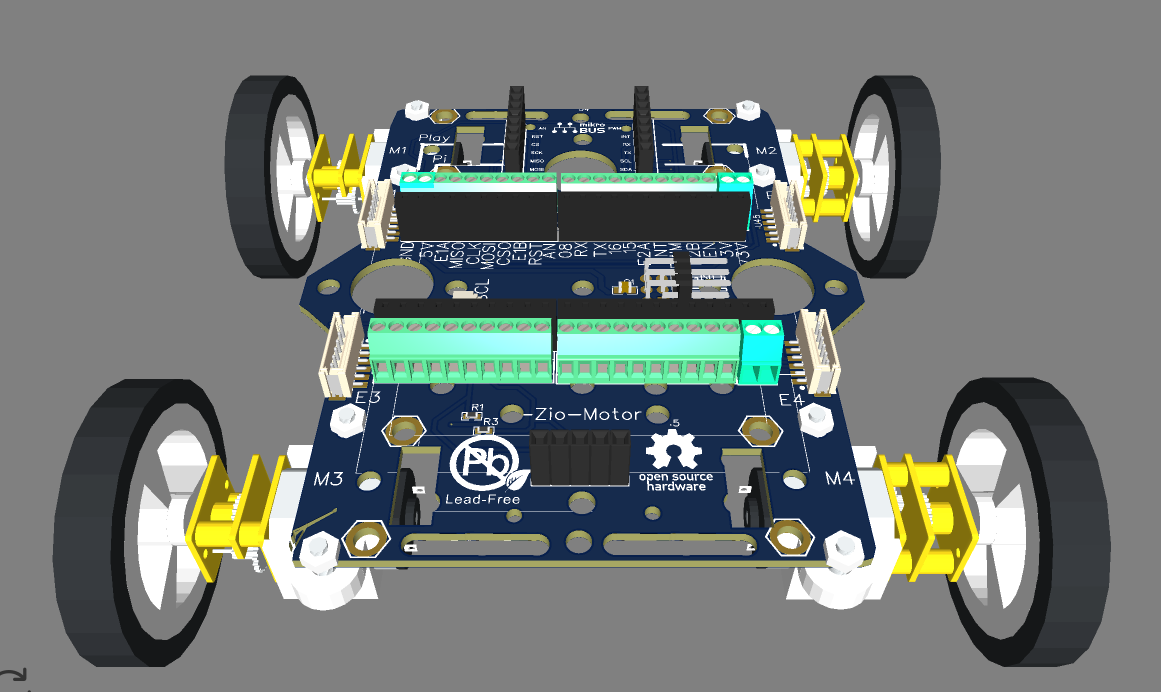
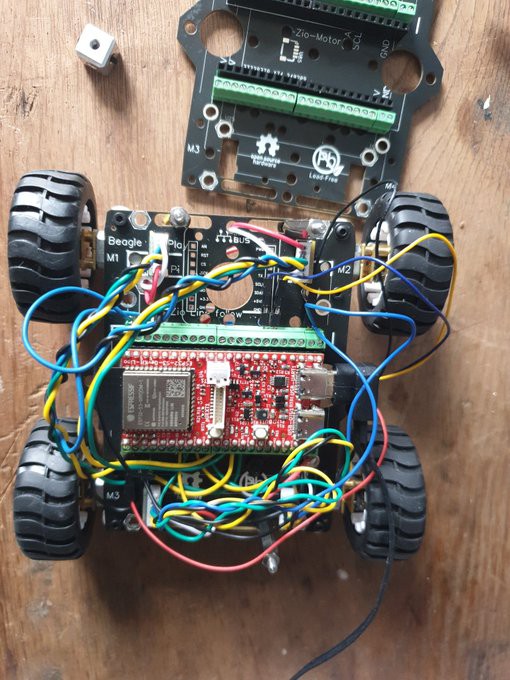
Pluggable motors
03/02/2024 at 19:38 • 0 comments![]()
Having a bunch of encoder cabling is quite messy, It is functional but also fiddly to connect. I've almost finished a version that includes pluggable motor sockets to make the cable connection easier and less error prone
![]()