Wprowadzenie
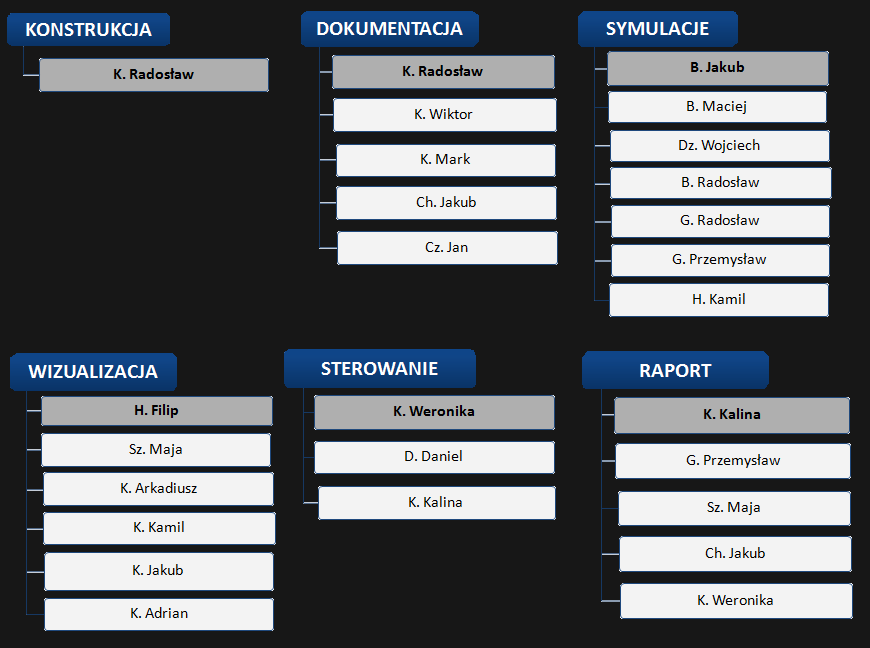
Członków zespołu podzielono na sześć podzespołów:
Projekt automatycznej skrzyni biegów wykonano przy użyciu środowiska
programowego Autodesk Fusion 360, a jej sterowanie za pomocą Arduino Uno.
Przeprowadzono również symulacje podzespołów, wykonano dokumentację
techniczną i wizualizację (render) projektu.
Konstrukcja
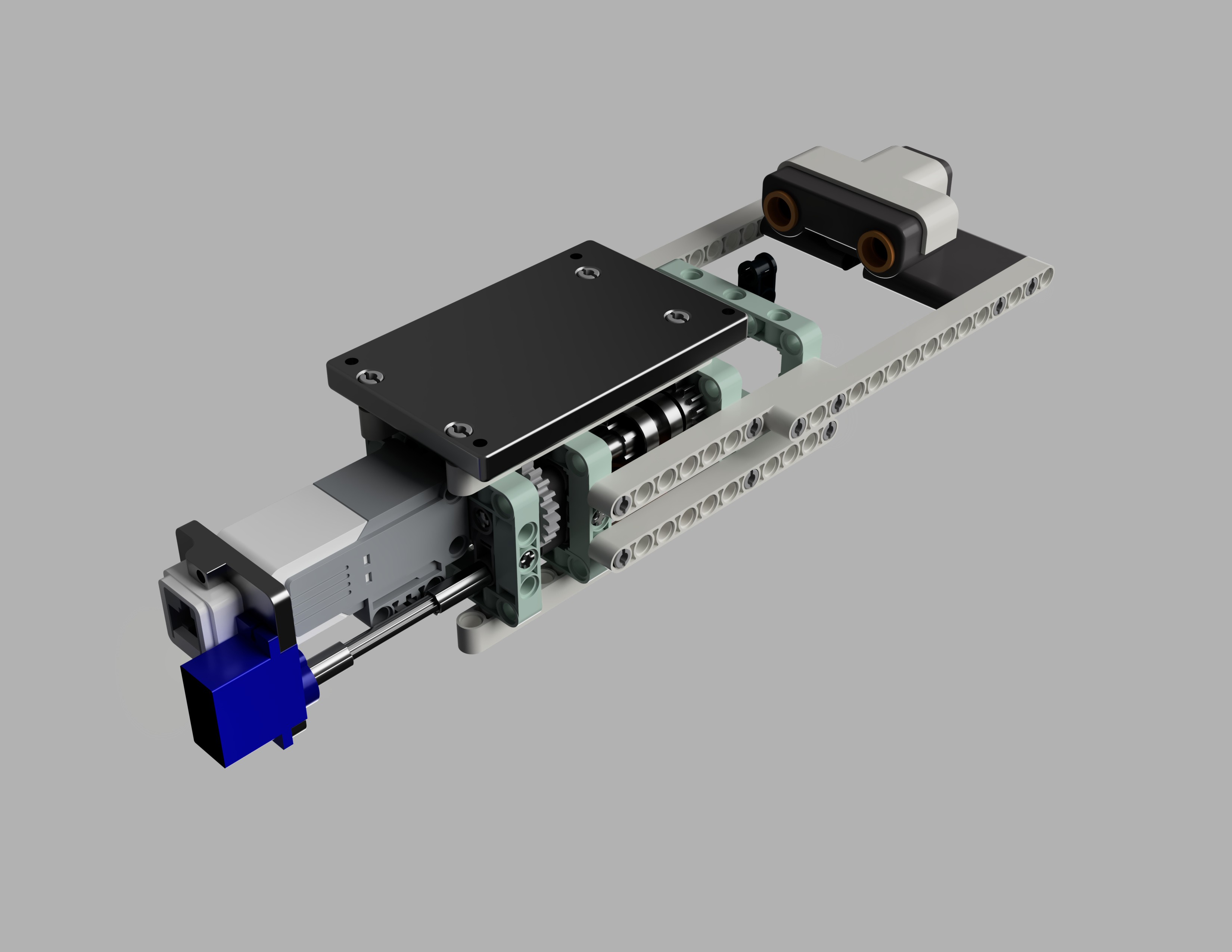
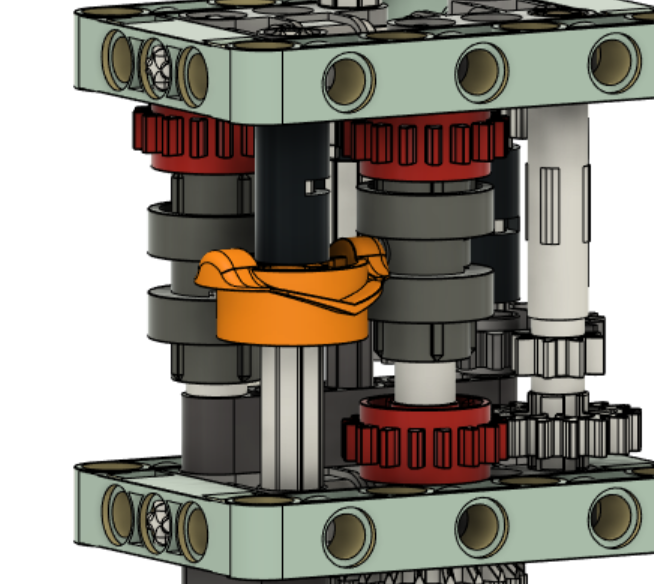
Układ skonstruowany w programie Fusion 360 składa się z modułu do zmiany
biegów, czujnika ultradźwiękowego, silnika LEGO oraz serwa, które służy do zmiany
biegów.
Render modelu - widok z ukosa:
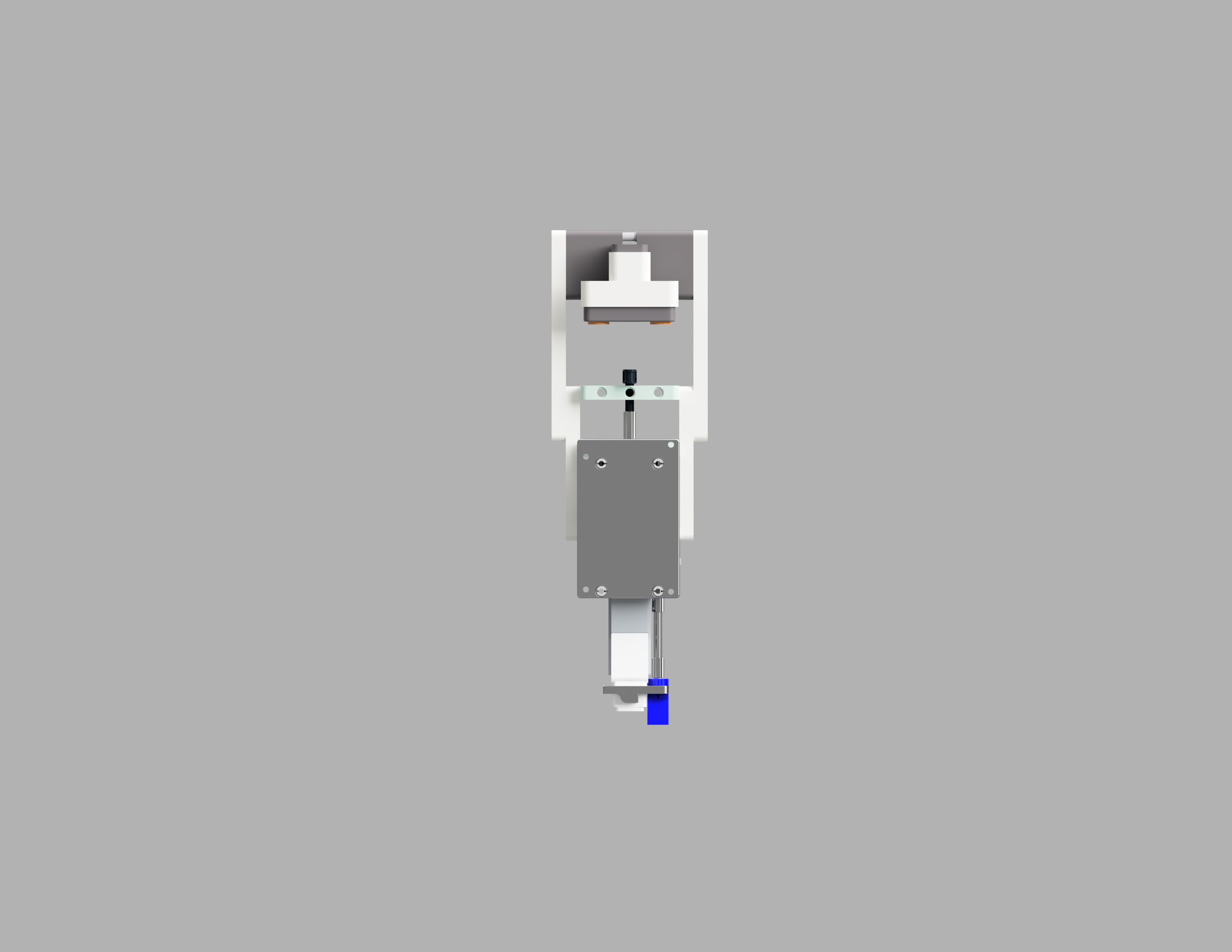
Render modelu - widok z boku:

Render modelu - widok z góry:
Opis działania
Schemat kinematyczny:
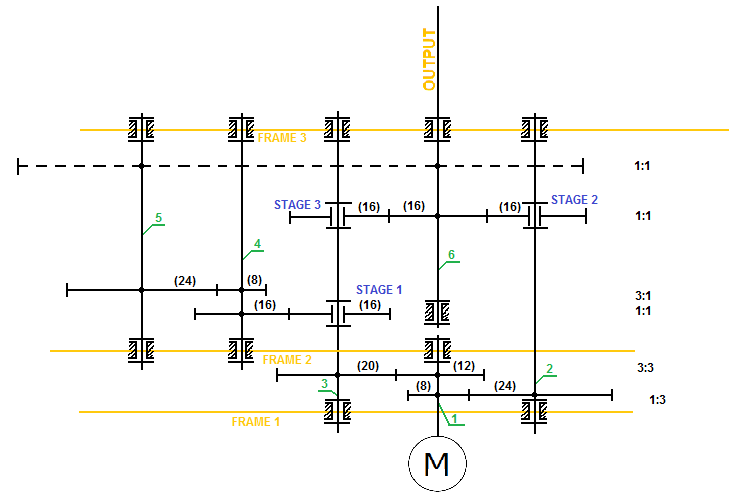
Schemat został zmodyfikowany na rzecz zaprezentowania działania skrzyni na płaszczyźnie 2D. W wyniku czego linią przerywaną narysowano elementy fikcyjne, gdzie w rzeczywistości zamiast nich znajduje się jedno koło (16). Działanie automatycznej skrzyni biegów opiera się na utwierdzaniu z osią odpowiedniego koła obrotowego w wyniku czego uzyskujemy odpowiedni bieg.
Biegi są zmieniane na podstawie elementu podobnego do mechanizmu krzywkowego:
Wizualizacja działania wykonanego projektu automatycznej skrzyni biegów:
Analiza kinematyczna
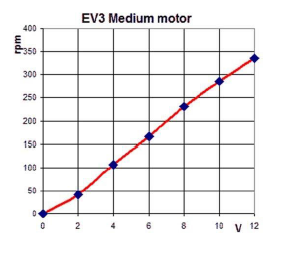
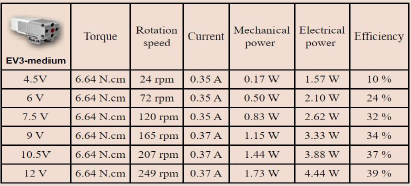
Dane techniczne silnika LEGO EV3 medium motor:
masa = 39 [g]
Parametry w stanie nieobciążonym (dla 9 [V] DC):
n = 260 [rpm]
I = 80 [mA]
Parametry w stanie przeciążonym (stalled motor) (dla 9 [V] DC):
M = 15 [Ncm]
I = 780 [mA]
Parametry w stanie obciążonym (normalnej pracy):
Kwestia prędkości i momentów poszczególnych osi skrzyni:
Oś 1 jest osią napędową, a oś 6 osią wyjściową (napędzaną).
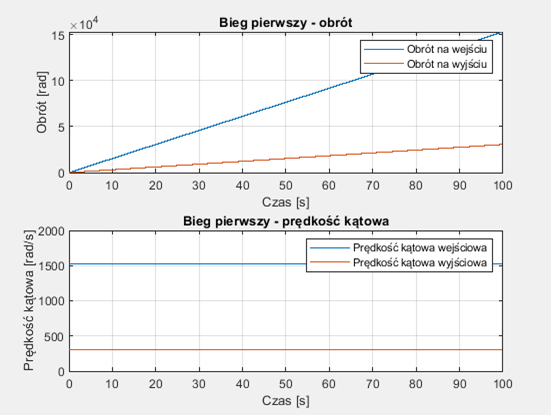
STAGE 1
Istotne osie o numerach 3, 4, 5.

Ostatecznie na wyjściu mamy:

Wykresy prędkości kątowej i obrotu dla biegu pierwszego:
STAGE 2
Istotna oś 2.

Ostatecznie na wyjściu mamy:

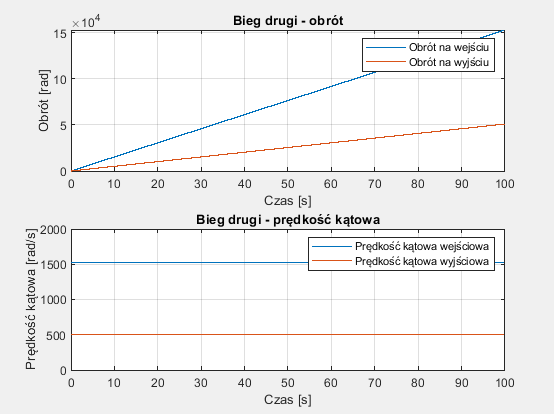
Wykresy prędkości kątowej i obrotu dla biegu drugiego:
STAGE 3
Istotna oś 3.

Ostatecznie na wyjściu mamy:

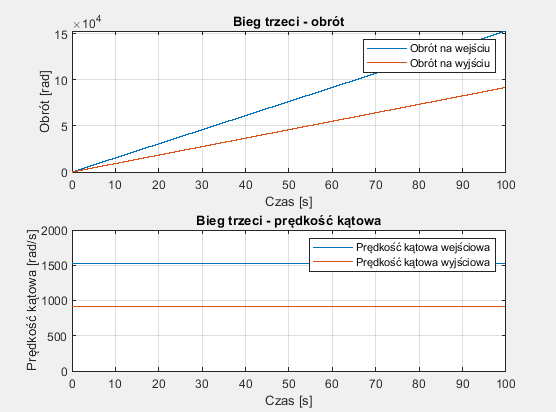
Wykresy prędkości kątowej i obrotu dla biegu trzeciego:
Analiza kinematyczna została przeprowadzona dla każdego biegu z osobna w postaci animacji (stage 1, 2 i 3) oraz wykresów obrotu i prędkości wejściowej od wyjściowej, które zostały wygenerowane za pomocą poniższego pliku Matlaba:
%% Kinematyka skrzyni biegów
clc; clear all; close all;
%wektor czasu
t=0:0.001:100;
%prędkość kątowa na wejściu (dobrana ze specyfikacji silnika (część o
%numerze 9455) z napięciem 9 [V] na wejściu silnika)
w=160*60/(2*pi);
w_in=w*ones(1,length(t));
fi_in=w.*t;
%% Bieg pierwszy
%przełożenie obliczone analitycznie
I1=1/5;
%wykresy wartości kinematycznych, wartości te są wyznaczone analitycznie,
%ale z dobrą dokładnością w praktyce, jako że połączenia kształtowe mają
%dość wysoką sprawność (około 99%)
figure(1);
subplot(2,1,1);
plot(t,fi_in,t,I1*fi_in);
xlabel('Czas [s]');
ylabel('Obrót [rad]');
legend('Obrót na wejściu','Obrót na wyjściu');
title('Bieg pierwszy - obrót');
grid on;
subplot(2,1,2);
plot(t,w_in,t,I1*w_in);
xlabel('Czas [s]');
ylabel('Prędkość kątowa [rad/s]');
legend('Prędkość kątowa wejściowa','Prędkość kątowa wyjściowa');
title('Bieg pierwszy - prędkość kątowa');
grid on;
ylim([0,2000]);
%% Bieg drugi
%przełożenie obliczone analitycznie
I2=1/3;
%wykresy wartości kinematycznych, wartości te są wyznaczone analitycznie,
%ale z dobrą dokładnością...
Read more »
 Hari Wiguna
Hari Wiguna