 Roddy "Rags" Read
Roddy "Rags" ReadThese are design and manufacture notes for Daisy3. A flying wind turbine.
After a few tweaks and tying it to a falco electric bike wheel... it looks like this and makes power...

A few more tweaks later and it looks like this.

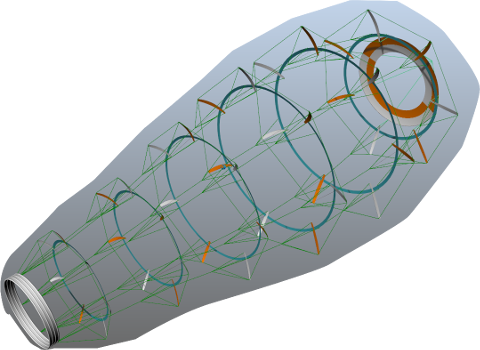
Here with the stack of 3 rings it is generating 100w constantly in 11mph winds. Notice how the bottom ring is struggling to hold form. It is getting crushed by torque in the bridling. I have revised the bridling to solve this for a more dynamic form and will test it soon.

Old design was a bit baggy... but I may tie it stacked on the back above the new one....
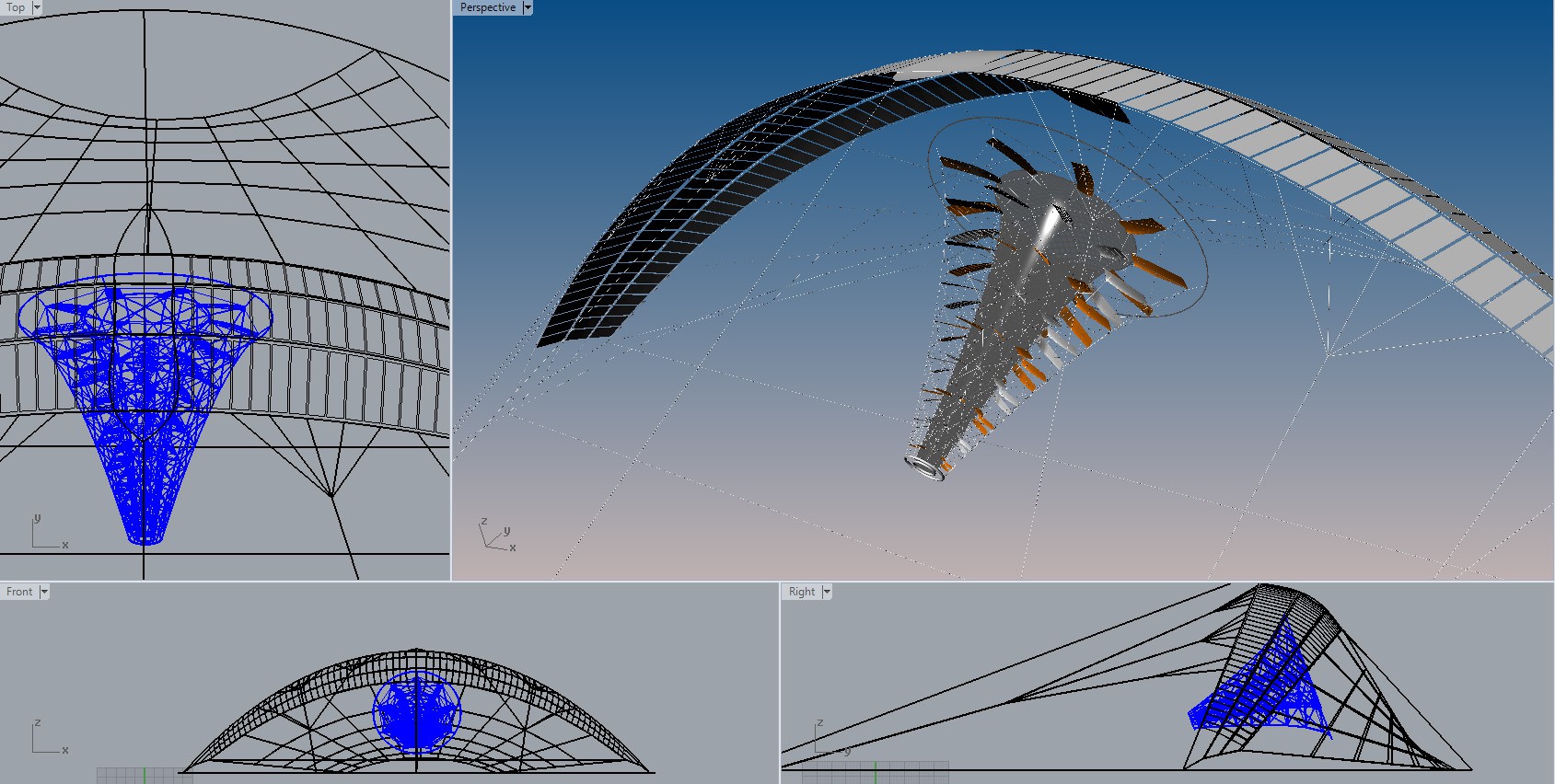
New Daisy has struts ahead of the leading edge to allow the kites further twist into wind and hold them steady in low speed. Much more reliable than the old one.
The principals are straight forward. Wind energy is sustainable. Wind is mostly high up.
Summarising the science of Airborne Wind Energy (AWE) it says:
Higher wind speed = way more power also more height = more power available to harvest.
Towers can't avoid cubic mass scaling law; more height = way more weight.
Therefore the future is flying wind turbines.
Design choices:
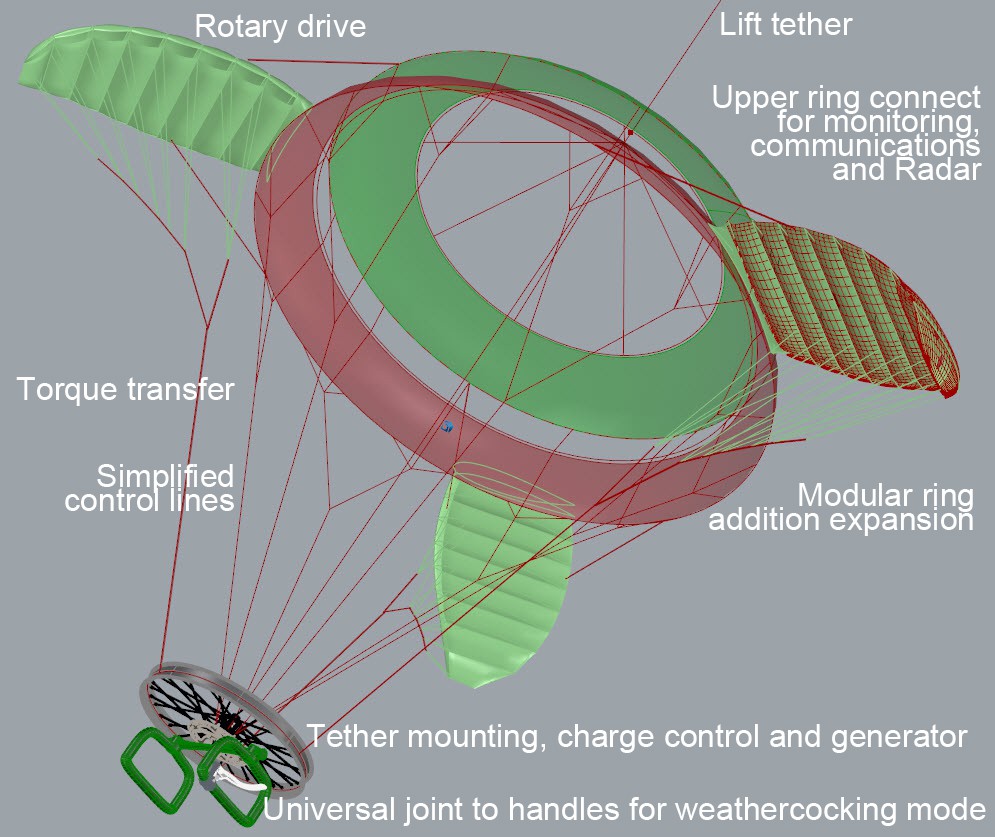
computer automated vs simple mechanics (I use simple mechanics but with monitoring and control options)
bouyant vs powered lift vs kite lift (So far I use kite lift but will also want to investigate hydrogen kiteoons, a steerable kite balloon generating it's own h2 aloft as buoyancy needs dictate)
airborne generation vs ground generation (ground = safer ; less mass aloft)
pumping reciprocal surfaces vs crosswind track vs crosswind rotary (rotary means continuous generation and less wear on components... needs good bearings)
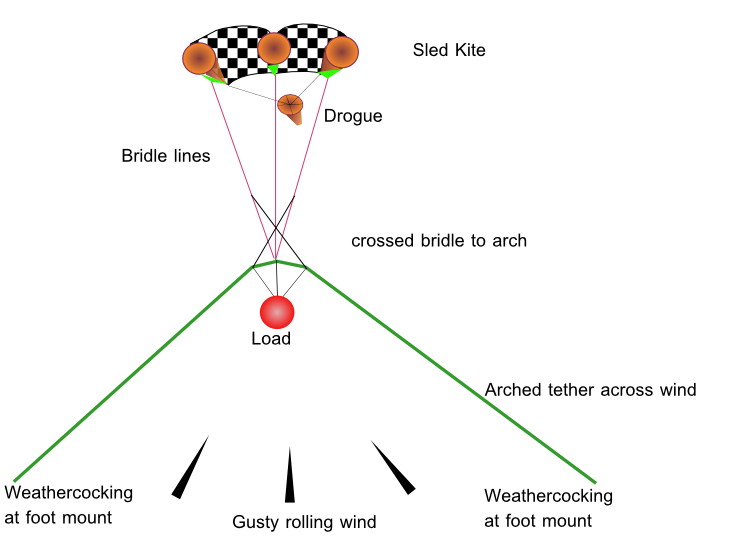
Google / Makani are building a robo helicopter kite. Sounds cool. But breaks some crucial rules of safe aviation. Most other companies use ground based generators ... I intend to use a small turret. (Even though Daisy can already fly without any pole e.g. in the image above or the youtube version.)
The standard FAA / CAA guidance is to have as little fast moving hard heavy stuff in the air as possible. So I try to use only rag and string soft kite architectures. Having said that, I do fly a cut down rollerblade wheel because good energy conversion often relies on a good set of bearings. The advantage to thinking about using soft rope and sheet materials is strength to weight in tension is much greater than standard compression devices. (My designs are often like fishing or climbing equipment)
Further FAA / CAA guidance suggests you should be visually conspicuous ... It's a very bright kite to help pilots. Yet just conspicuous enough to radar. I don't want to jam nor be invisible to Radar, So hoisting a small transponder on the stabilised lift kite will help.
Since we have steady 60m AGL altitude we can improve communications. The hills in this beautiful Island wilderness ruin my phone data. Luckily with my phone set to wifi hotspot and hoisted in a kite pocket, I can log in to internet (and all the goodness that brings) from ground level. Condition monitoring and many other uses come from having developed a Stabilised lightweight airborne lifting platform.
Sharing and openness is key to this project. That's how it has got this far.
Here are some more build notes







 Chris Low
Chris Low

 Timescale
Timescale
Hi Roddy - I was intrigued on (only just) seeing your videos. I'd been tinkering around on somewhat similar lines for a while - particularly with the basic idea of having a lifting kite separate from the rotational/generating component (ie. unlike Kitegen etc). I've not gotten as far as hooking anything up to a generator - just spinning a bike wheel. I was a bit stumped by the difficulty in finding/making inflated aerofoils which would greatly improve the power/weight ratio (and would, I imagine allow for scaling up - perhaps on a massive scale). Have you taken things any further since a year ago? I've got my own humble effort on Dropbox if you want to have a look. (I'm completely new to Hackaday so not sure about putting up videos here). Best wishes, Philip