 Pontus Borg
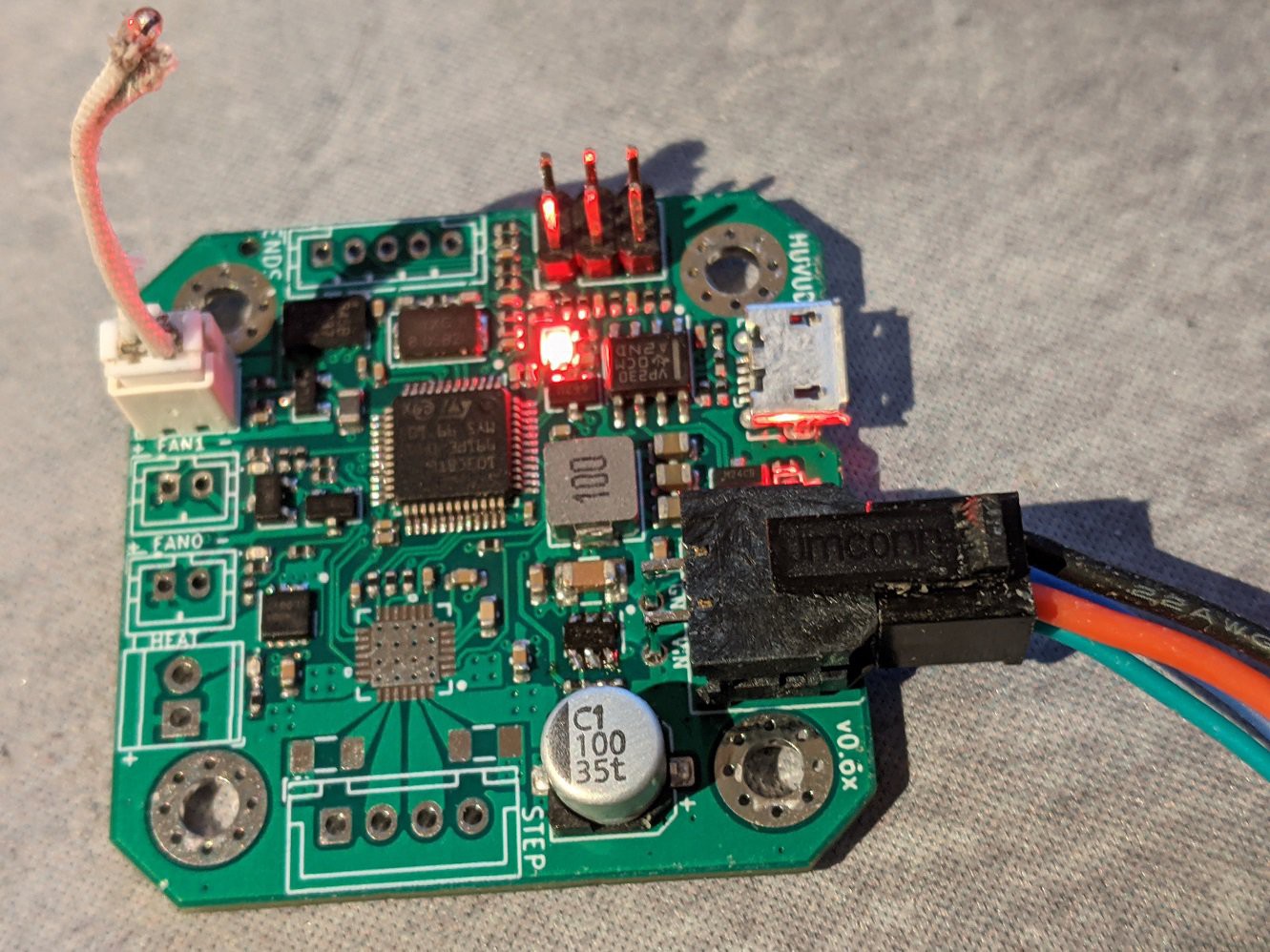
Pontus BorgThermals has been a challenge for this board. The stepper driver generates quite a lot of heat. Even if the TMC2209 is far more efficient than earlier drivers it's still a few Watts to get rid of, on a tiny board.
The goal is that is should be possible to run an extruder stepper with no extra cooling at all.
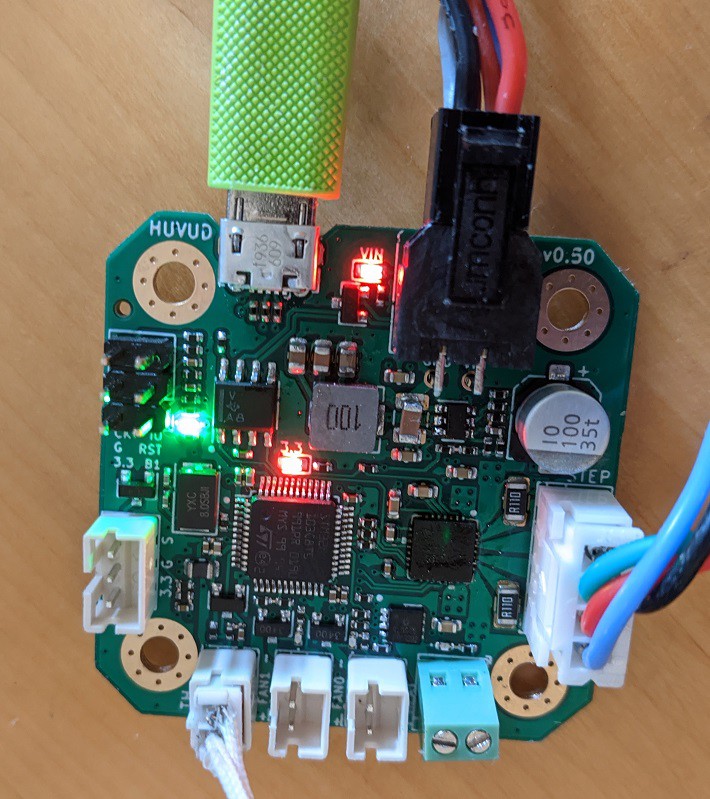
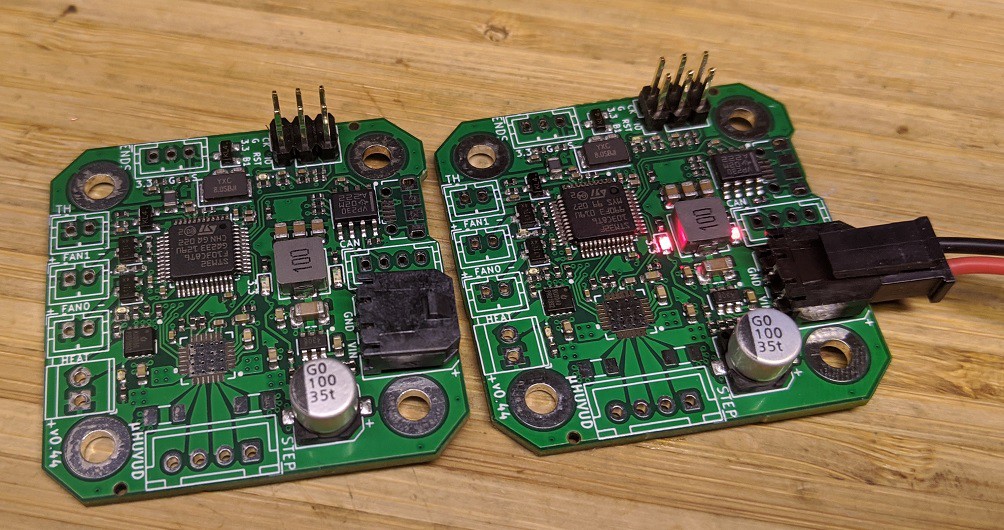
The board is designed to work as a heat sink, it has large ground planes to distribute the heat over the entire board. So far it's been manufactured with the normal thin 1oz copper layers, it works.
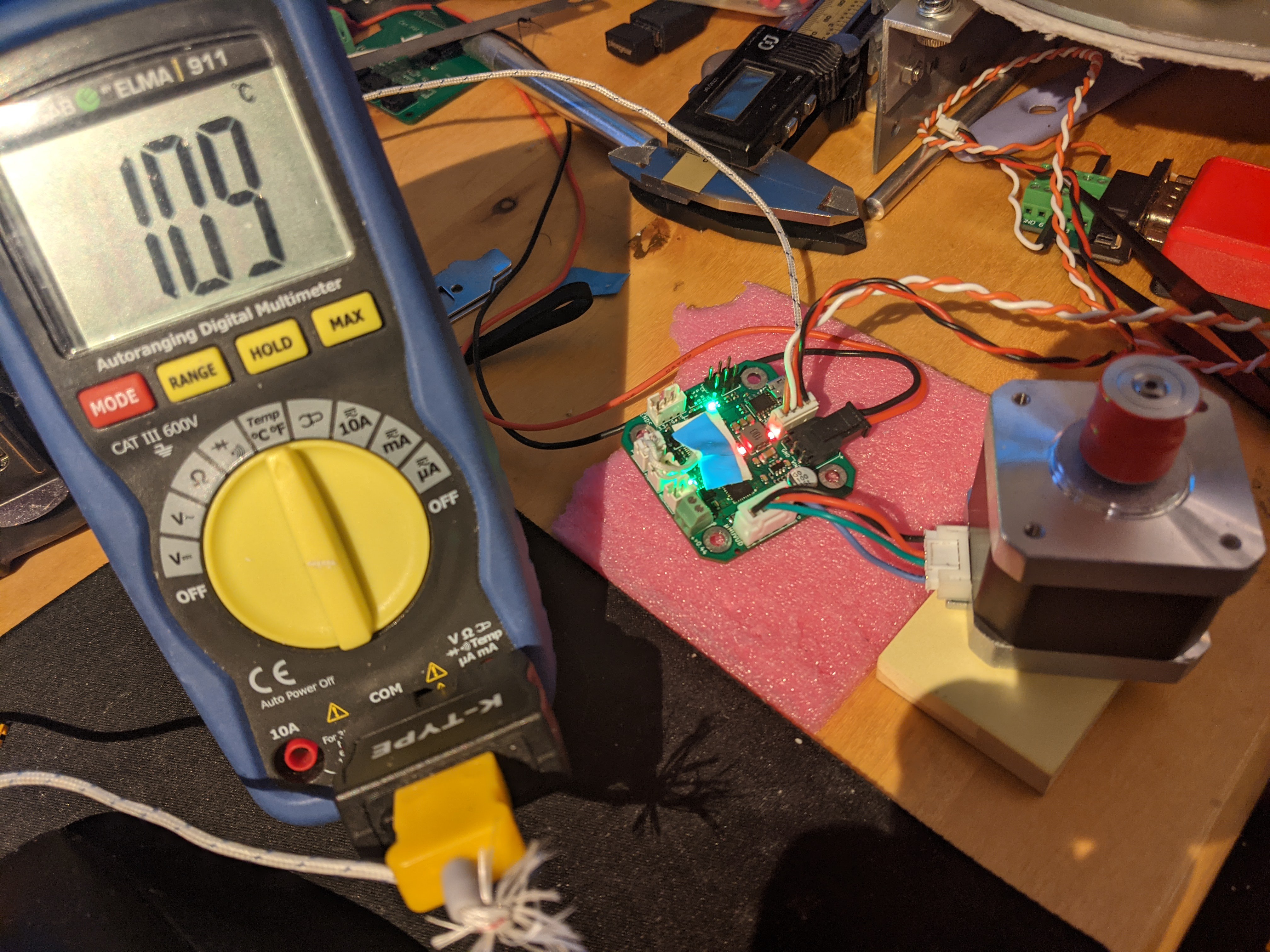
My testing has shown that it can run up to 1A RMS and it's just warm to the touch. At 1.2A it gets hot, and over that it's a good idea to add some small cooling fins. Results will vary depending on the motor you use.
I'll have to experiment with the CoolStep feature of the driver and see what results that might give. It's a cool (no pun intended) feature where the driver lowers the drive current when there is low load on the stepper driver.





 Paul Kocyla
Paul Kocyla
 Bharbour
Bharbour
 Paul J R
Paul J R
Is there a recommended tutorial for CANBUS 101.
I'm trying to get my head around the Huvud toolboard firmware requirements and the CAN Board firmware requirements (board connected to Raspberry Pi 4B) using Klipper CAN Bus support.