Mr.Else
Mr.Else-
Breadboard #2 - with Home Assistant
10/10/2020 at 20:59 • 0 commentsdetailed documentation will be added...
If you do not need the home automation integration check out the Log for Breadboard #1, maybe this will fit your needs. It works completely offline.
Until then, check out the videos:
-
Breadboard #1
10/10/2020 at 19:16 • 0 commentsThis post is dedicated to the first prototype, which I used reliably for about 1 year. In this version of the garage there was no connection to home assistant or the local network. An advantage of this version is that it works independent from network failures etc. On the other hand in this version the flap remains open as long as the vacuum cleaner robot is on the road.
Electronics:
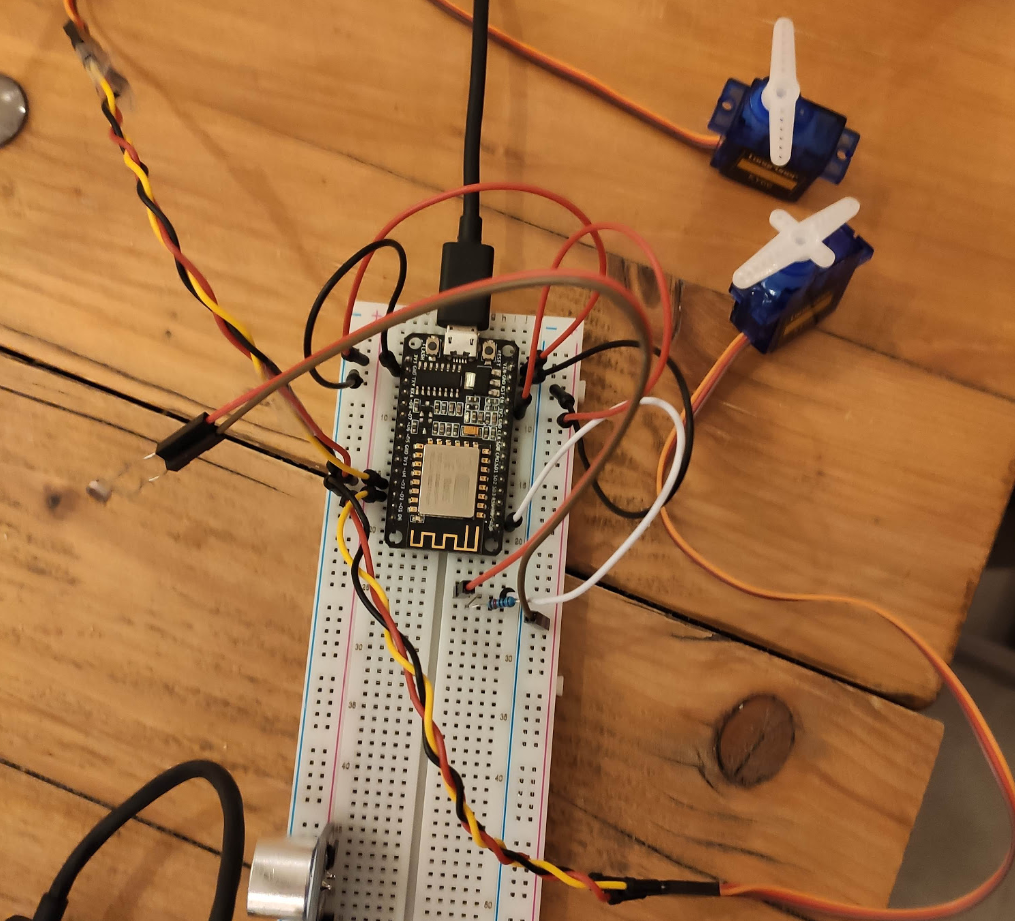
The general setup is quite simple. A LDR is used to access the status LED of the docking station from the vacuum cleaner robot (see previous Log). As soon as the LED is ON a NoedMCU registers the change of the LDR signal and gives the servos the instruction to open the flap. I also added a switch for opening the flap, a switch for closing the flap and a LED that lights up when the flap is open.
The setup is shown in the picture below (Note that the switch and the LED is not attached in the picture below):
![]()
The according code is printed below. There is a lot room for improvement (e.g. instead of letting the garage door bump down like a stone let it go down smooth) but it works. The appropriate NodeMCU pins can be found as comments in the code.
#include <Servo.h> Servo servo1; Servo servo2; const int ldrPin = A0; int ledPin = 2; //Set pin for LED Light ESP D4 int switchOpen = 14; //D5 int switchClosed = 12; //D6 void setup() { Serial.begin(115200); pinMode(ldrPin, INPUT); pinMode(LED_BUILTIN, OUTPUT); // set the digital pin as output. pinMode(ledPin, OUTPUT); // set output for LED pinMode(switchOpen, INPUT_PULLUP); digitalRead(switchOpen); pinMode(switchClosed, INPUT_PULLUP); digitalRead(switchClosed); servo1.attach(4); //D2 servo2.attach(0); //D3 //servo1.write(10); //servo2.write(10); delay(2000); } void loop() { int ldrStatus = analogRead(ldrPin); // read the input on analog pin A0 Serial.println(ldrStatus); // print out the LDR value if (digitalRead(switchOpen) == LOW) { ServoOpen(); Serial.println("Servo Open via Switch"); } else if (digitalRead(switchClosed) == LOW) { ServoClosed(); Serial.println("Servo Closed via Switch"); } else if (ldrStatus <= 100) { ServoClosed(); Serial.println("Servo Closed via Sensor"); } else { ServoOpen(); Serial.println("Servo Open via Sensor"); } } void ServoOpen() { servo1.attach(4); //D2 servo2.attach(0); //D3 servo1.write(5); servo2.write(120); digitalWrite(LED_BUILTIN, LOW); digitalWrite(ledPin, HIGH); delay(250); servo1.detach(); servo2.detach(); } void ServoClosed() { servo1.attach(4); //D2 servo2.attach(0); //D3 servo1.write(120); servo2.write(5); digitalWrite(LED_BUILTIN, HIGH); digitalWrite(ledPin, LOW); delay(250); servo1.detach(); }Hardware:
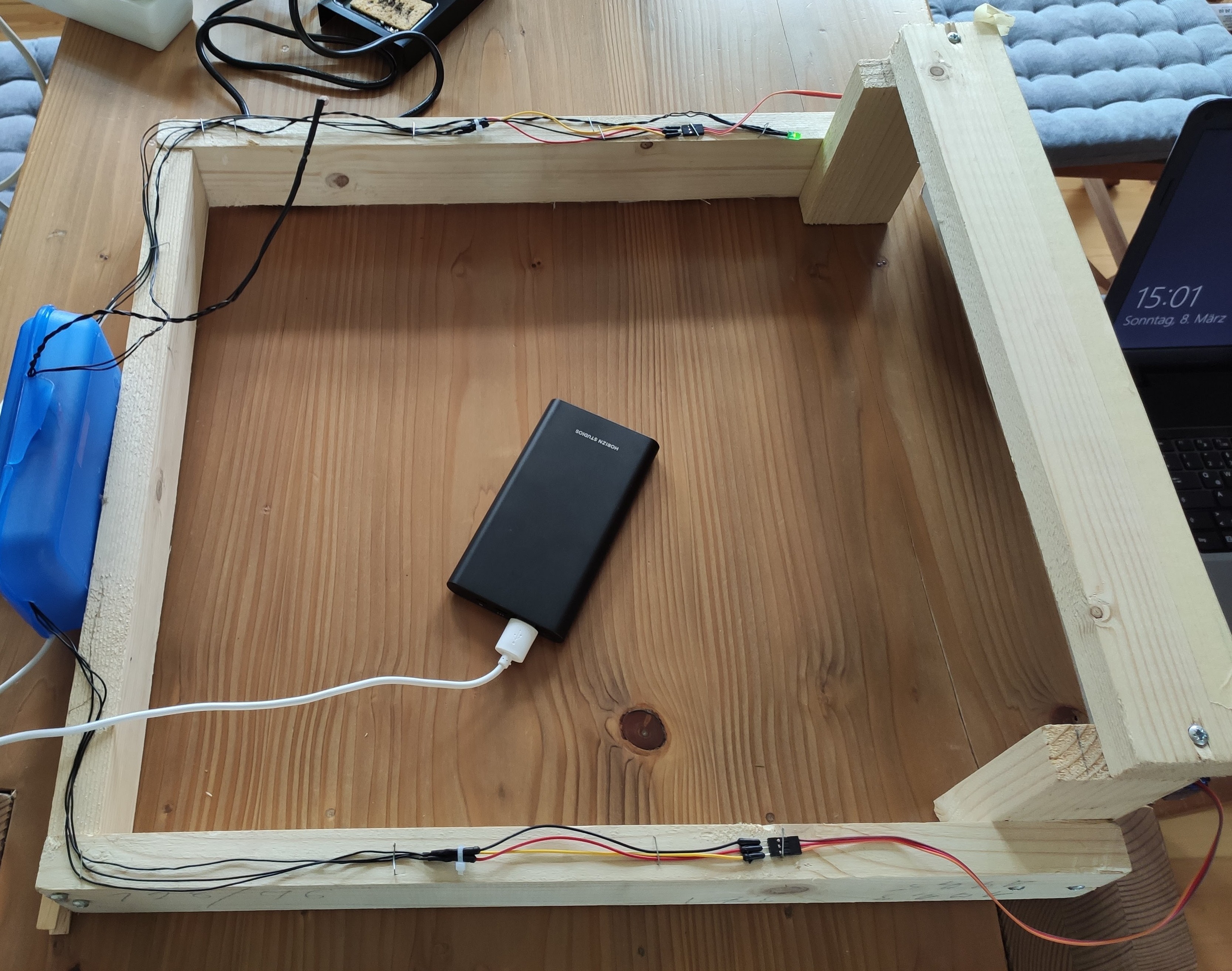
For the frame I made a simple gate out of wood. The electronics were attached to it.
![]()
The servos are held in position by simple screws. Not really pretty but functional. I also painted the frame black. As servo arm I used a threaded rod and cable ties. Unfortunately I had nothing better at hand. It's really time for a 3D printer!
![]()
![]()
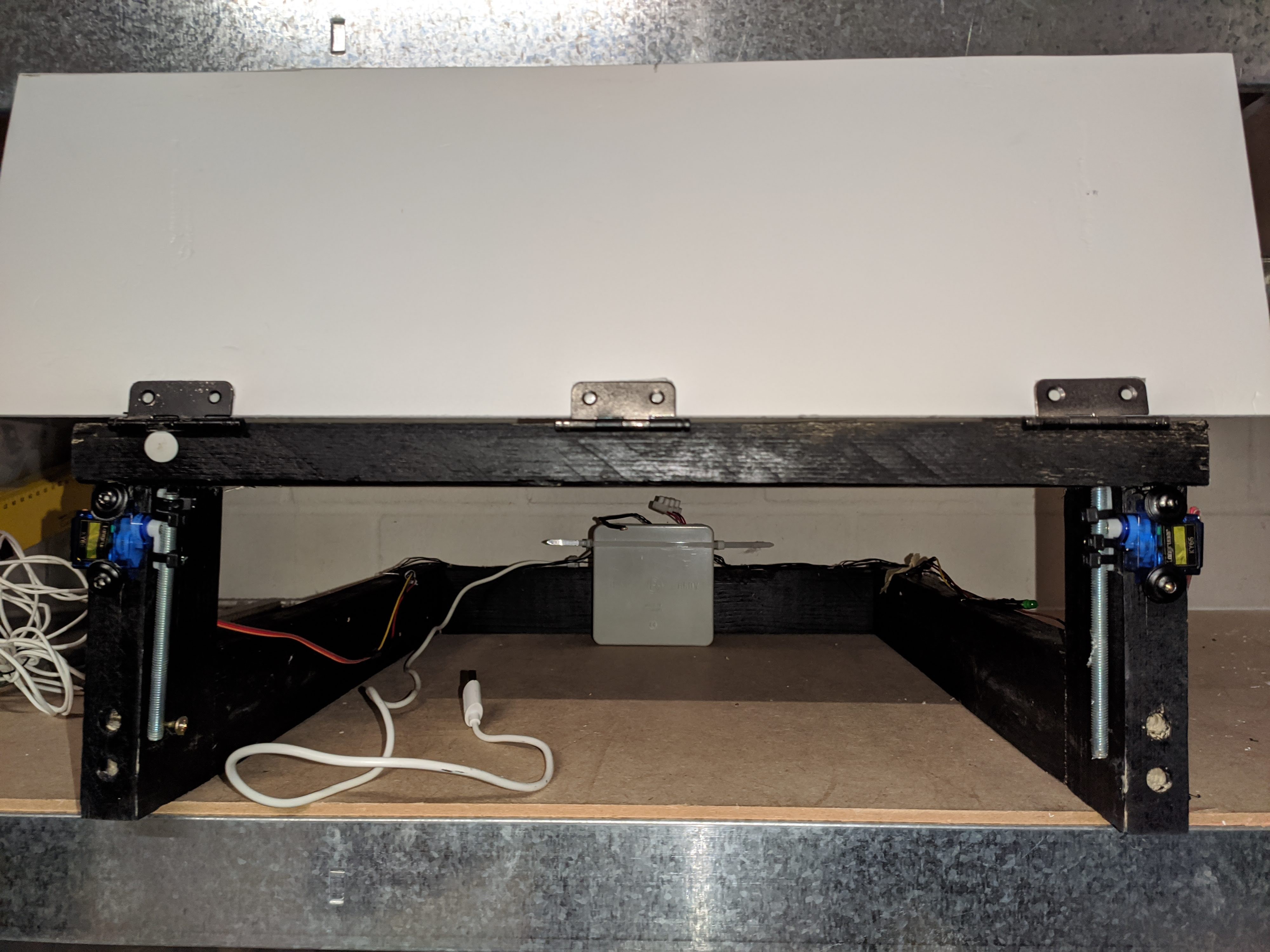
The door was made out of 3 mm rigid foam board. This material was light enough to be lifted by the SG90 micro servos.
![]()
The whole setup was then installed under the kitchen cabinet.
![]()
![]()
See the video below for the complete setup in action. Note that the door stays open while the vacuum robot does its job.
-
Initial thoughts
10/10/2020 at 12:38 • 0 commentsFirst of there were considerations on how exactly I could build a vacuum robot garage:
The garage needs to recognize when the robots starts
I wanted to keep things as simple as possible. The Roborock S 50 has a status LED on its loading dock that switches from off to on during cleaning. So I wanted to use it as a trigger for my garage. Since I didn't want to disassemble the charging dock, I wanted to read the LED signal with a light sensor (LDR).
![]()
Loading dock LED on - Vacuum Robot cleaning ![]()
Loading Dock LED off - Vacuum Robot parking/charging The space under the kitchen cabinet is limited by the depth and width of the cupboard
In my case this was approximately 43 cm x 50 cm. Since the robot already needs a width of 38 cm, there is not much space to the left and right. Therefore, too bulky frames could not be used. For the first version I used wood, later I changed to plastic L profiles.
The height prohibits bulky open and close mechanisms for the garage door
In my case the available height is 16 cm. It would have been nice if the garage door had disappeared into the frame when it was opened. This is difficult to achieve because there are only a few centimeters left between the robot and the cabinet. For this reason, the door opens outwards by two servo arms pushing the door up.
![]()
With this approach, however, the load on the servo arm is quite high. So the weight of the door itself needs to be as low as possible. Unfortunately, a wooden door would be too heavy (at least for the servos I used. Obviously you could use high torque servos, but the usually expensive and require more space). Instead I simply used hard foam board for the door. The material is light, thin and durable and fits my needs perfectly
Vacuum Robot Garage with Home Assistant
Project for a vacuum cleaner robot garage with Home Assistant integration. Save space - park your vacuum cleaner under the kitchen cabinet.