lion mclionhead
lion mclionhead-
Unitree robot
11/11/2022 at 02:20 • 0 commentsChina made a bit more progress towards the ultimate goal with another robot dog.
https://www.unitree.com/en/go1
This one is specifically marketed as a running coach & food transporter. At the $2700 price point, payload is 7 lbs freedom units. Maximum speed is 5.5mph freedom units. Prices beyond $3500 enable speeds over 8mph. Range is 1 hour. It tips the scales at 26lbs freedom units. Of course, the reviewer didn't test any of the parameters.
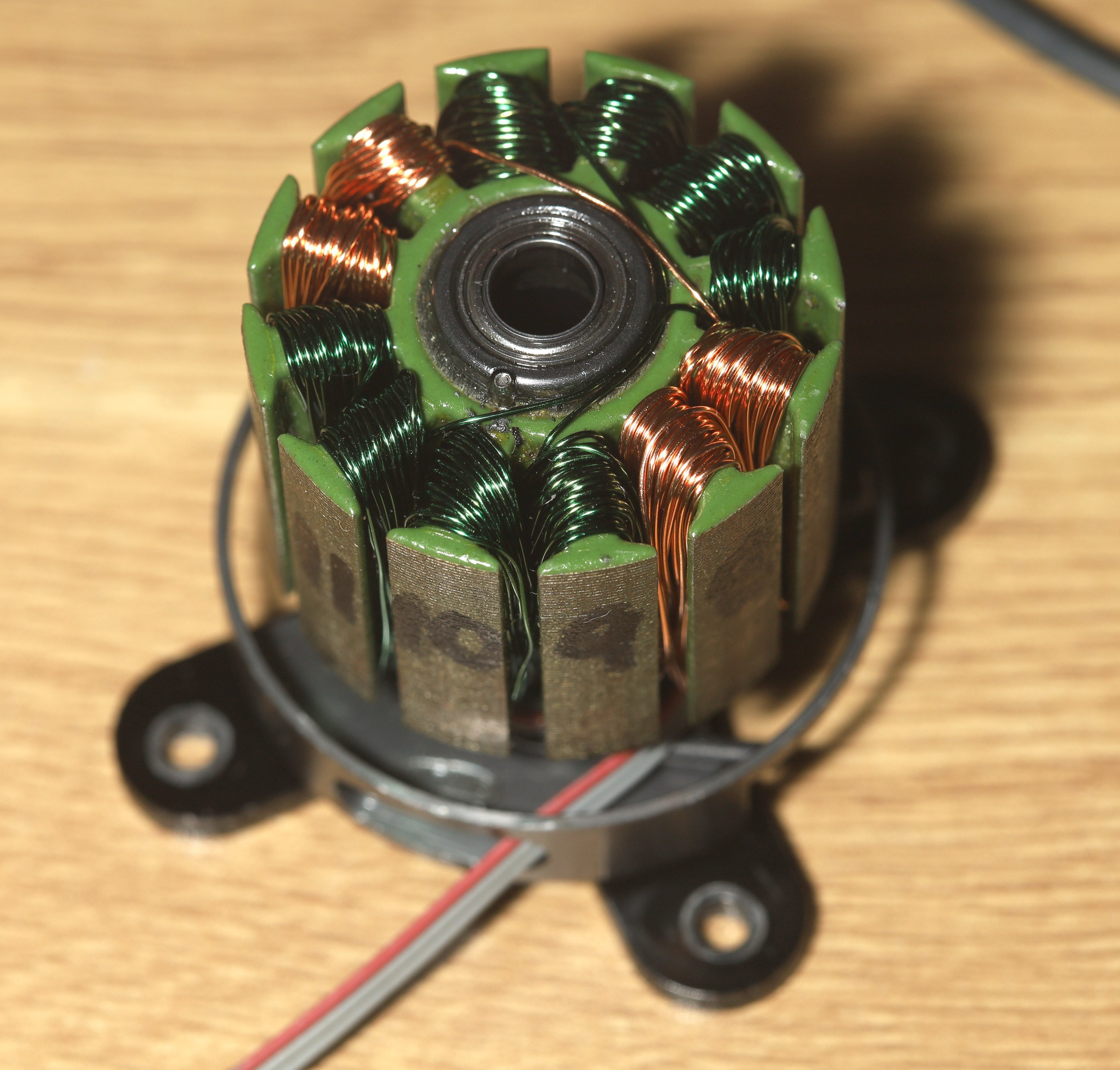
It uses direct drive brushless motors. There's no mention of walking on unimproved terrain, navigating obstacles, navigating crowds of animals. It has a bulky 2 paw controller & relies on a brain to navigate. It has some ability to stay in a fixed position relative to the user, through machine vision, but also shown is a GPS tag as a backup. They emphasize the SLAM functionality.
There's a 3-6 month warranty, depending on the component. The lion robots need major servicing by 6 months or 1000 miles.Lions aren't sure they'd want to haul 26lbs of robot around if it died, but there's definitely a lot to be gained by making it heavier. The lion robot is sized for its typical role. The typical need is a maximum speed of 10mph, payload of 5lbs, range of 4 hours, light enough to carry 6 miles if it dies, manual driving.
We're not sure why everyone in the video is sitting in an office to stare at confuser screens. It seems everyone in the transportation business is required to go to an office.
Bosstown dynamics always claimed the high mass & pinch points were the reason for its dogs not being intended for consumer roles. In typical chinese style, the users are expected to take risks.
-
Rudolf update
10/23/2022 at 03:16 • 0 commentsInstalling roborudolf is the 21st century equivalent of decorating the tree.
There is a desire to repaint the antlers with metallic brown, but this would entail rebuilding all the LED strings. Reprinting the antlers would fix some fitment problems. Another desire was flattening the tips of the antlers.
The headlight becomes another difficulty when the nose is installed. The red LEDs might be enough to replace it, if driven at their maximum voltage. The plastic dome could be taken off. The headlight could be installed above or below the nose. Maxing out the nose would entail yet another voltage converter.
![]()
![]()
![]()
Metallic brown is definitely more fitting for a robot. It went on more even than flat brown. Printing .8mm nozzle .32mm layers took up more ink. The ideal antler is metallic brown TPU, but that would be much harder to bond. These were printed as solid halves with 20% infill. The easiest way to bond was gluing a right angle out of 1 half & the base, then gluing the remaneing half.
![]()
![]()
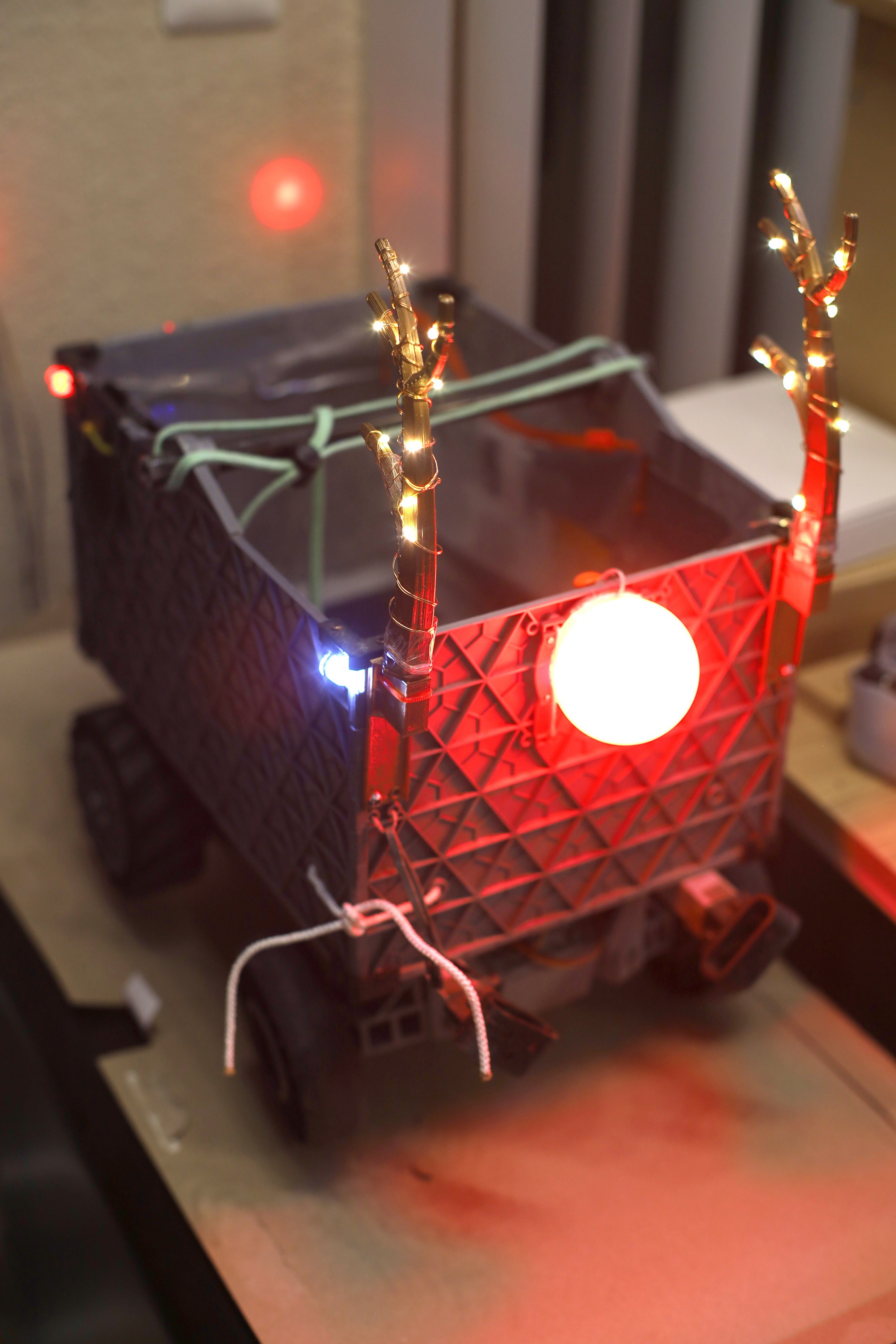
New antlers fitted with lights. The metallic brown is less obvious in the dark.
![]()
Locked & loaded
-
Propdrive dreams
10/22/2022 at 20:12 • 0 comments# dist sec min/mile 1 205 45 5:49 2 209 46 5:47 3 200 46 5:59 4 203 46 5:58 5 201 48 6:22 6 200 47 6:12 7 311 71 6:19 8 312 70 6:11 9 304 75 6:34 10 303 76 6:42 11 401 98 6:29 12 403 97 6:24
The lion kingdom evolved a routine of increasing interval distances as the headwind slowed it down. In this case, the headwind was weaker than expected & the 400's ended up faster than the 300's. There's not enough power to hit 6 minutes in the headwind as previous robots did.
![]()
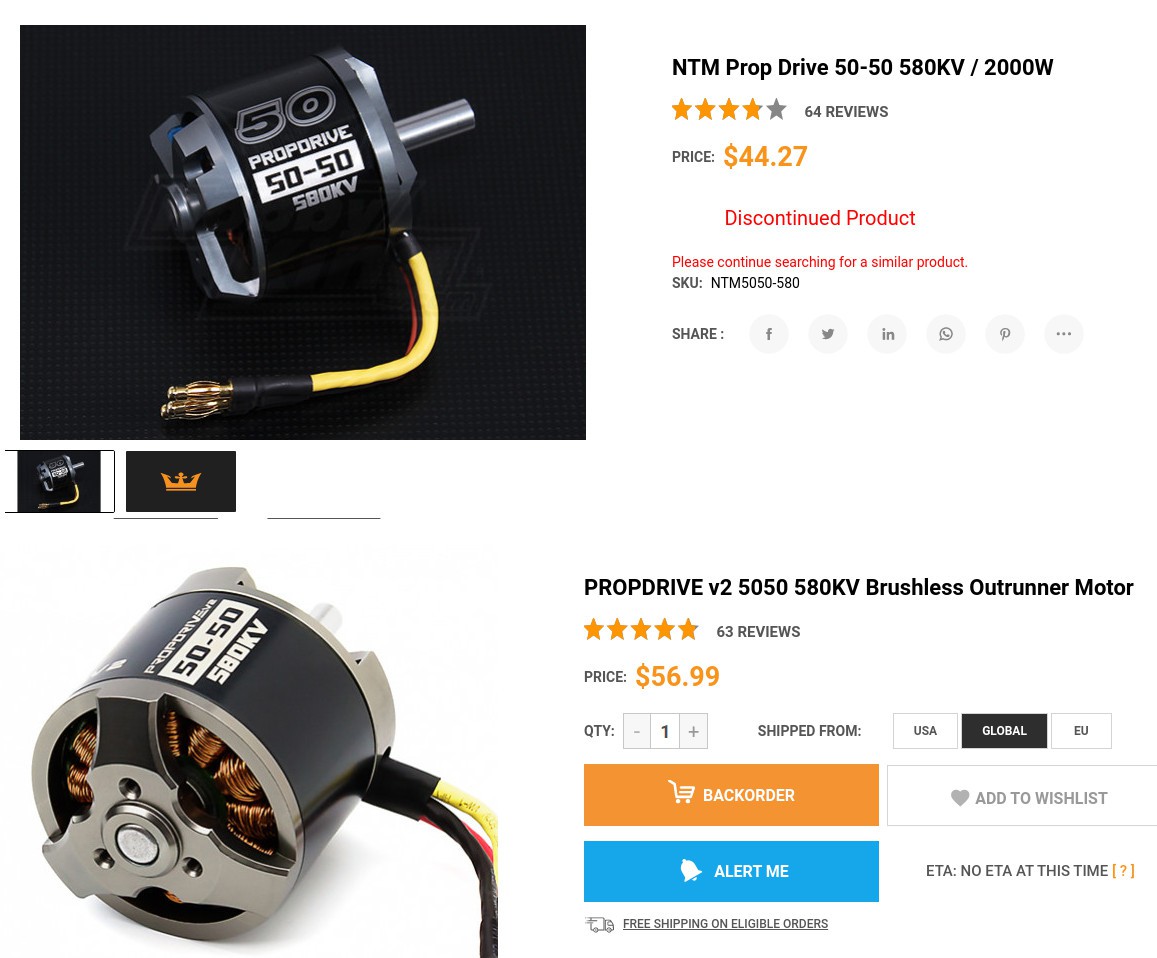
The propdrive 5050 is believed to have the key to 6 minute pace intervals. The weight increase could be manageable. It would fit in the latest wheel design. It only wouldn't fit in previous wheel designs which directly copied the dimensions of the lunchbox.
A pair was once $90 & after bideflation, was $120. The lion kingdom worked out a way to pay so much money when larger motors in the form of a hoverboard would be cheaper. It's all about saying the premium is for miniaturization.
![]()
![]()
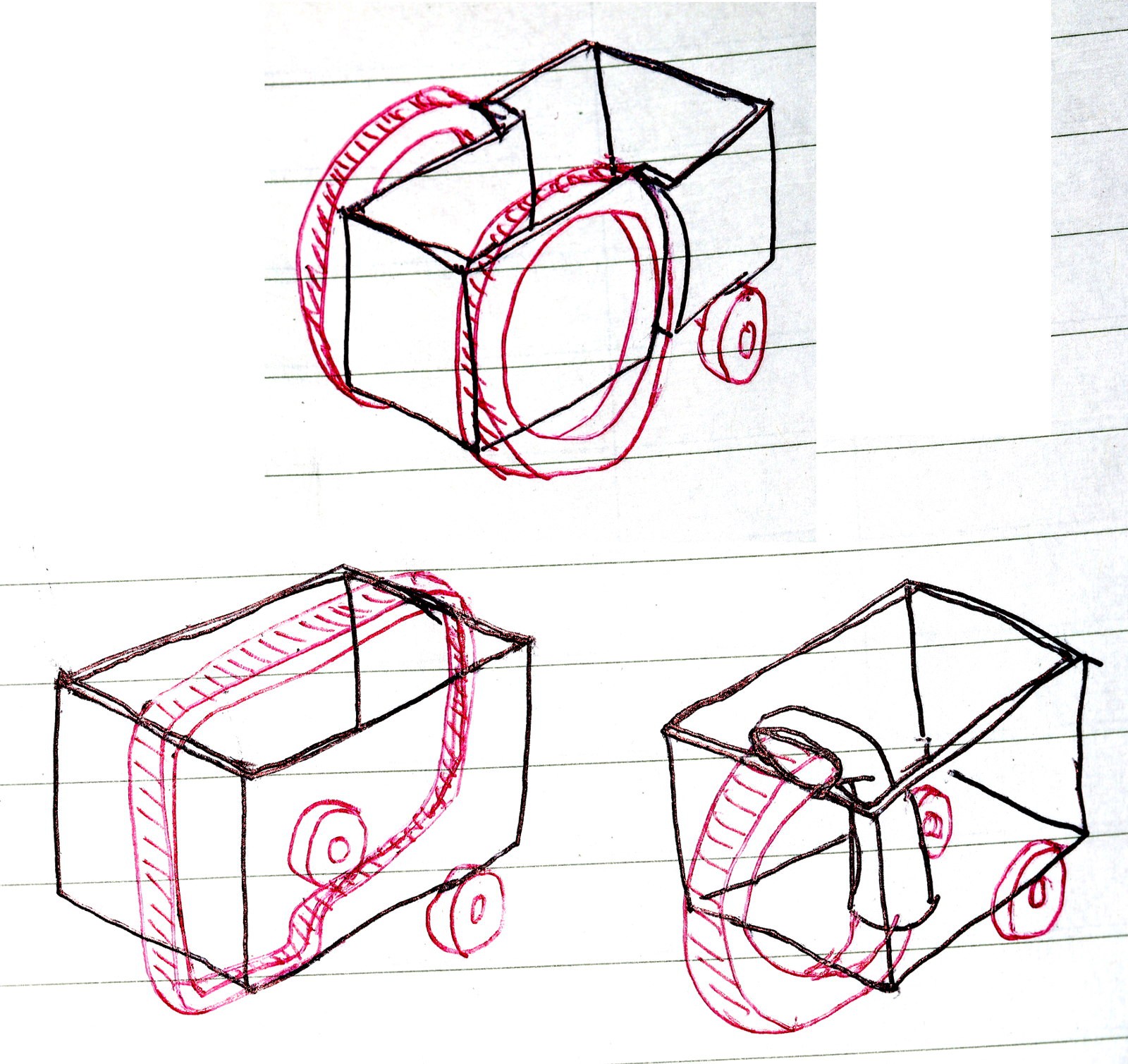
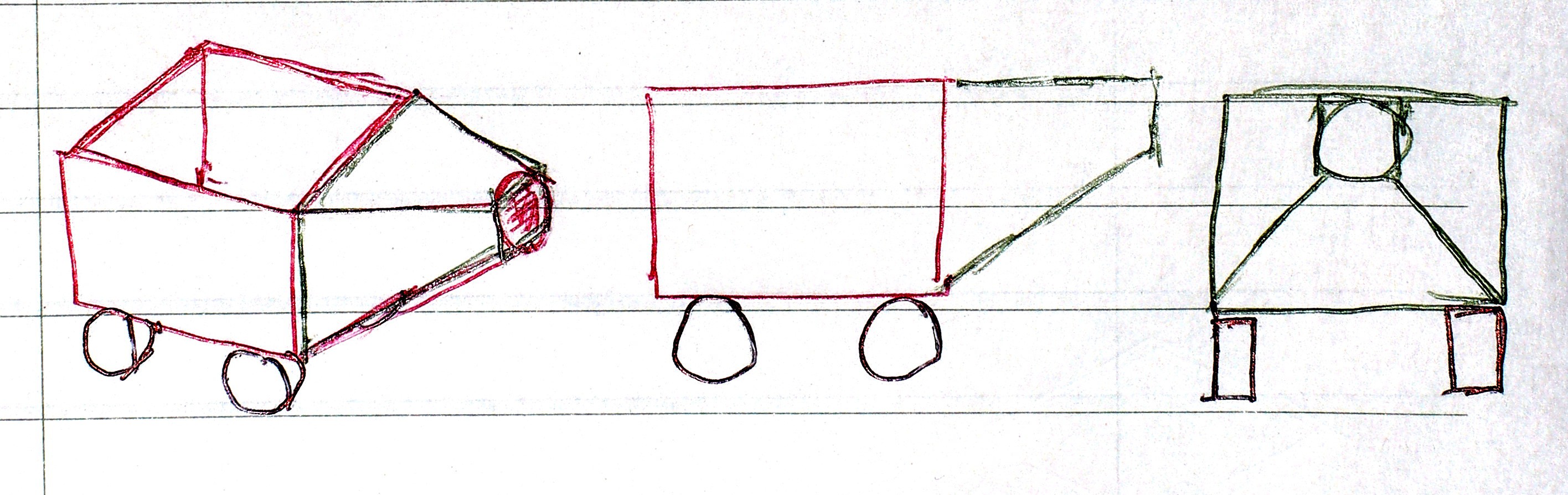
There's still the idea of having large diameter motors on the outside, extending the container all the way to the bottom, & making the container narrower. The electronicals & batteries could go inside the motors. This idea could also involve extensions of the container inside the motors.
The most radical idea is having a single traction motor which wraps around the entire container. It would require a tank tread to achieve the various bends. The motor is shaped like an oval. The problem is carrying the vehicle by the tire, mounting the camera on it, storing things which are taller than the motor. It's not believed having a single motor passing down the middle of the container would be practical.
The trend is large, hollow motors with the container integrated in the empty parts of the motors. It's believed these motors can be constructed out of electromagnets bolted onto a linear PETG framework & permanent magnets embedded into TPU. Smooth sliding of the TPU over the PETG would take some creative bearings & seals. Chinese do sell bare ball bearings without the races.
A gearbox or belt is just a way to increase the diameter of a motor, but compress it into a smaller area & make a lot of noise.
![]()
The leading candidate for increasing the speed is an aerodynamic nose cone. The problem with a nose cone is it's going to cover the headlights. It could be translucent PLA. The headlight could attach to the front of the nose cone & the front could be on top. The nose cone has to fold up & fit in the container. It might work if it hangs from the top.
-
Camera pole problems
10/11/2022 at 00:49 • 0 commentsSomething so simple can be complicated if you're poor enough. The camera pole developed a hair more friction. Then it started jamming, revealing the servo didn't make any torque at its highest speed. The trick with servos is they don't make any torque at their rated speed. Their rated torque only happens at low speed. They automatically slow down as the load increases. A stepper just stalls.
Running it on 6V buys more torque, but the raspberry pi can't run on 6V & it's still not jam proof. There's actually a sharp cutoff between high torque & low torque. The cutoff rises with increasing voltage.
More importantly, the L6234 falls over below 6V. The camera pole originally ran on 6V before the raspberry pi. There would have to be a different regulator for the raspberry pi or a lower speed would have to be found for the camera pole.
There can be 5 more wires to the motor sensors. It can go back to stock servo firmware, with PWM being used to control speed. Its Silabs F330 microcontroller could be reprogrammed as a stepper driver to run on 5V. Stock servo firmware with PWM is unlikely to be precise enough. The rest are a lot of work with little payoff.
No-one has ever hacked a servo's firmware. Using the sensors would entail making a speed governor instead of stepping on a schedule. The most effective solution is using the F330 as a lower voltage stepper motor driver.
The camera pole has always used a stepper motor out of a belief it offered the most speed control. If speed governors are the future, it would be a lot easier & smaller to use an N-20 gearmotor with some encoder. It could be a use case for back EMF but it would take some testing to see if the range of motion was enough for back EMF to be stable. The easiest solution is just an open loop H bridge driving an N-20 gearmotor, but the N-20's in the apartment are too fast. It would need some ramping for the PWM & it wouldn't be predictable enough to use machine vision.
There are other gearboxes in the apartment which could attach to stepper motors, but they're big. Stepper motors are big because they need a big old motor driver with heat sink.
The original pancake motor with gearbox never failed. It was just big.
https://hackaday.io/project/187734-convert-a-brushless-servo-into-a-stepper-motor
The decision was finally made to hack the servo to use its own 5V stepper motor driver. That 7 day investment solved the torque problem, reduced the voltage to 5V, & freed up another L6234.
The camera pole came back with a vengeance. The total power consumption with lion tracking was still 350mAh/mile. All this stepper motor work is quite worthless compared to a 360 cam. Maybe it's worth it if you have spare parts to make up for the $200 of mecha it would require from scratch.
-
Diablo robot
09/12/2022 at 19:58 • 0 commentsThe lion kingdom was intrigued by another self balancer. This one had articulated legs that could change height, move forward & backward, in addition to the hub motors. 4 of its 6 direct drive motors were devoted just to articulating the legs. Maybe the idea was to use the articulated legs to jump up curbs. It's a lot of mass to do just 1 thing. Curb hoppers have been made out of 6 wheels with just the center wheels articulated by servos.
-
Anti static front wheels
08/29/2022 at 20:15 • 0 comments![]()
![]()
The next point of friction discovered was between the front PLA wheels & the TPU wheel forks. There could be an inset where the bearings are half exposed & the PLA is away from the TPU. Printing the wheels out of conductive PLA might allow charge to return to the wheel forks. There could be a paper washer for the wheels, which doesn't generate static.
9 miles near water didn't have any problems, supporting the static theory. Even though the apartment hydrometer tops out from 40-45%, a trip back to the waterfront showed just how dry that really is. The lion kingdom once spent most of its life near the waterfront, eventually not noticing it anymore. That was much higher humidity even on dry days. Better than an embedded oscilloscope, it might be more useful to have a portable hydrometer for debugging.
![]()
![]()
![]()
The antistatic wheels were liberated from common PLA.
This too failed to end the servo failures. Servo lockups returned exactly the same as before. The lion kingdom takes note of every change that could have lead to a drive not locking up or locking up. Getting wet obviously prevents lockups. A battery connector on the left side, a repositioning of the speaker, a rollover preceded good phases. The servo motor case isn't grounded.
-
Static electricity
08/26/2022 at 05:26 • 0 commentsThe servo started locking up again after only 700 miles, always in the same place. It was another case of static electricity. This time, nothing was rubbing in the wheel wells. It's believed to still be static electricity, but lacking a definitive source, the focus turned to where the potential difference could be occurring. There are the aluminum angle rods. It's believed a potential exists between the aluminum rods & the battery ground so some jumper cables were put in.
![]()
It immediately became obvious that getting good conduction with anodized aluminum was hard. The anodized layer is actually very resistive. It's not easily conducting with the motor driver ground. Only heavy scraping with the probe got a continuity beep. That resistance makes anodized aluminum prone to static discharge. It's believed to discharge into the motor driver ground, which causes the mane board to briefly have a large negative voltage.
The grounding straps did nothing & attention turned to the wheels. Maybe the TPU gaskets build up static electricity as they rub against PLA. A potential would develop between the stationary motor parts & the rotating motor parts.
Eventually, static discharges into the motor windings. Static discharge in motors is well known & manely happens in spaceships. It causes fluting of the bearings & failure of control moment gyros. They usually need a shaft grounding ring.
Creation of static electricity by rubbing materials is called the triboelectric effect.
https://en.wikipedia.org/wiki/Triboelectric_effect
No-one really knows why rubbing some materials creates static electricity while others don't. It's assumed 1 material has to be an insulator because 2 conductors would discharge when they touched. 1 material has to be an electron donor & 1 material has to be an electron receiver. A vandegraaf generator transfers electrons from an acrylic roller to a rubber belt. It doesn't rub anything. Electrons flow from the metal sphere to the brushes to the acrylic roller to the belt. The brushes transfer electrons through the air. The - charged belt deposits its extra electrons on a metal roller.
There's a table of electron donors & receivers. Polyurethane of TPU fame is shown as a good electron receiver. PLA would have to be a good electron donor based on observations. The outside of duct tape would have to be a good electron receiver based on observations & sure enough, duct tape is covered in polyethylene. Acrylic is a good electron donor. Some metals create charges. Paper & wood are bad generators of charge. Theoretically, rubbing 2 identical materials doesn't generate a charge.
A return path from the chassis to the wheels is needed, no matter what. Maybe using identical materials for the motor shroud & gasket would reduce charge.
![]()
The decision was made to replace the TPU gaskets with PLA gaskets. They still managed to fit & rotate despite not being compliant. The theory is PLA will generate less static electricity than TPU. That didn't do anything. The servo still locked up in the same place.
The next plan is to print the gaskets & part of the shrouds out of conductive PLA. The lion kingdom ordered $20 of conductive PLA or 100 grams. 500 grams are now $50. The trick is printing the shrouds in 2 parts, gluing a conductive part where the shouds rub onto an insulating part. Then, the 2 rubbing parts would discharge into each other. Beyond the gaskets, the next source of static electricity could be debris inside the motor rubbing against the metal.
The trick with a 2 part shroud is it's very precisely aligned with the motor. It would need a filament change during a single print.
-
Casted tire treads & new controller sock
07/29/2022 at 02:16 • 0 commentsShe uses a single part mold out of pre degassed silicone. Then she pours VytaFlex 60 - Liquid Urethane Rubber in the mold. This is a degassed rubber like what lions searched for years ago. Sadly, it doesn't release from PLA molds. Maybe it releases from TPU molds or it can take a release agent. The lion kingdom can't afford to make a silicone mold. It's still prone to air bubbles getting trapped so it needs some massaging.
Another vijeo says it doesn't have the amount of grip you want in a tire tread.
![]()
![]()
![]()
The last sock was installed back on April 1. It became pretty odoriferous despite all the effort at drying it. At least the electronicals never showed any of the problems they used to. It turns out the LEDs show through the tape. If the 1 piece of plastic can be sealed, this could be a fabric sock with a button to keep it in place.
There is a moisture absorbing elastic fabric with clasps which would make an ideal sock. The pious religious left voting amerikans might disagree with an animal running around with this fabric. -
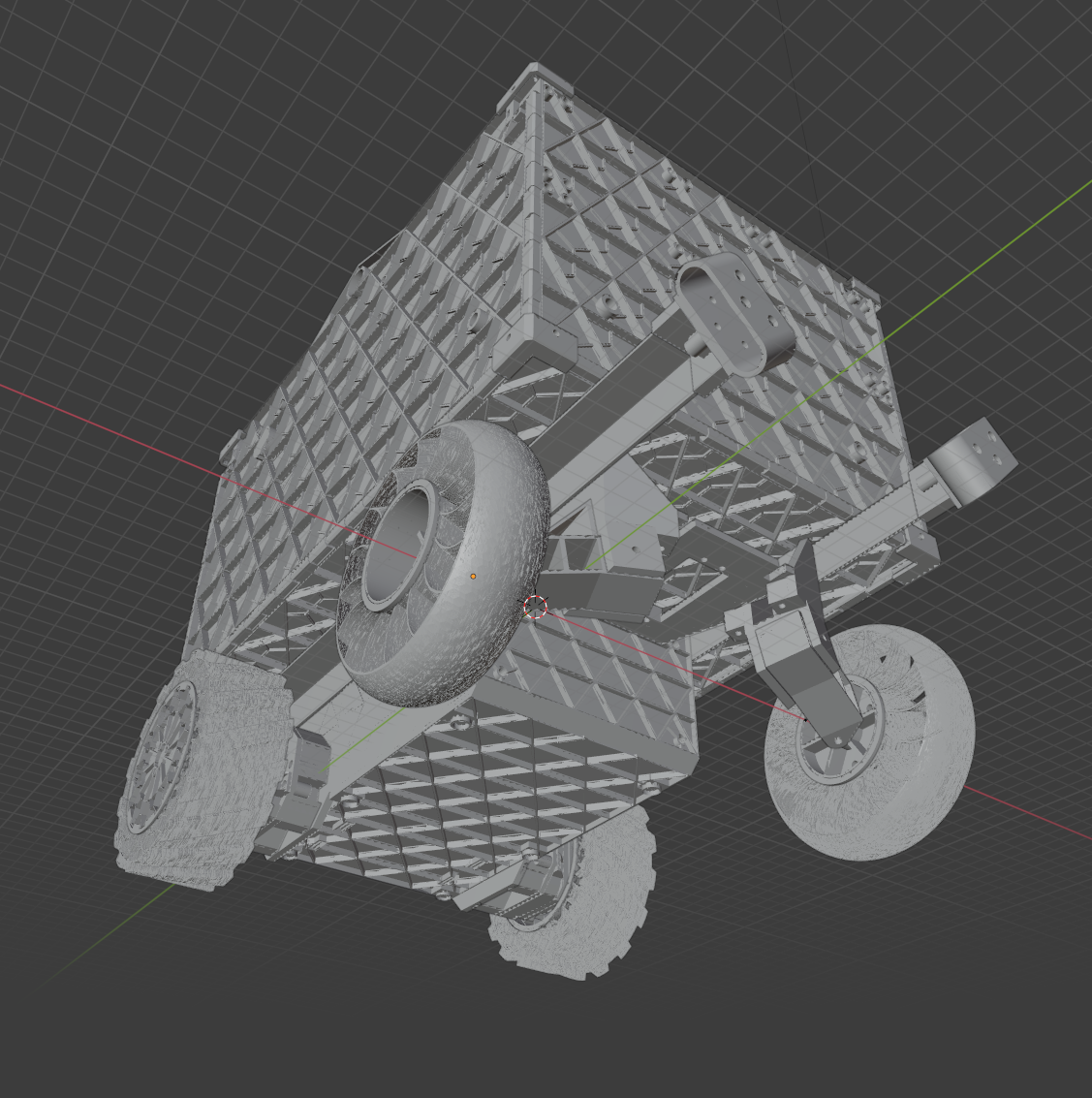
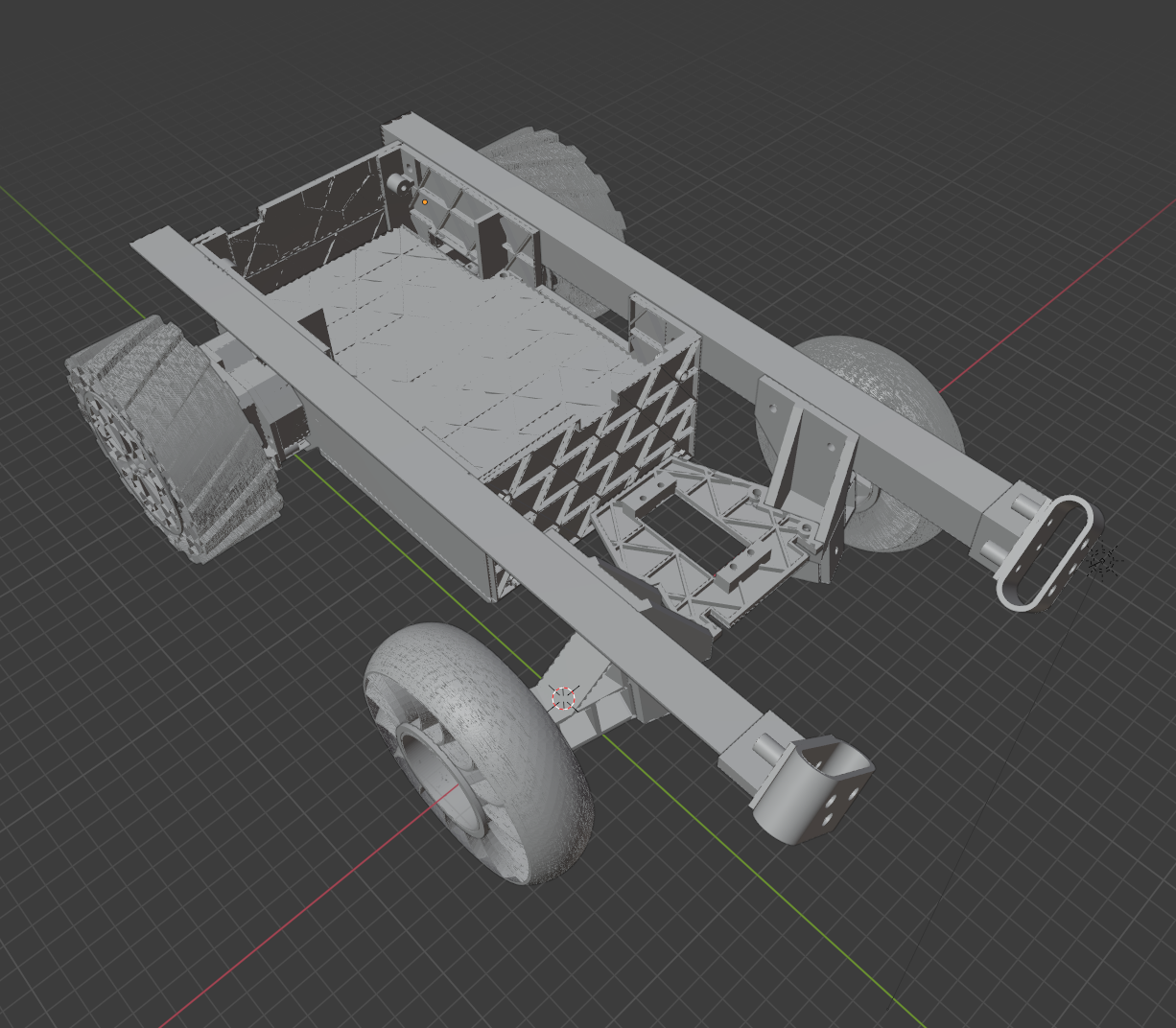
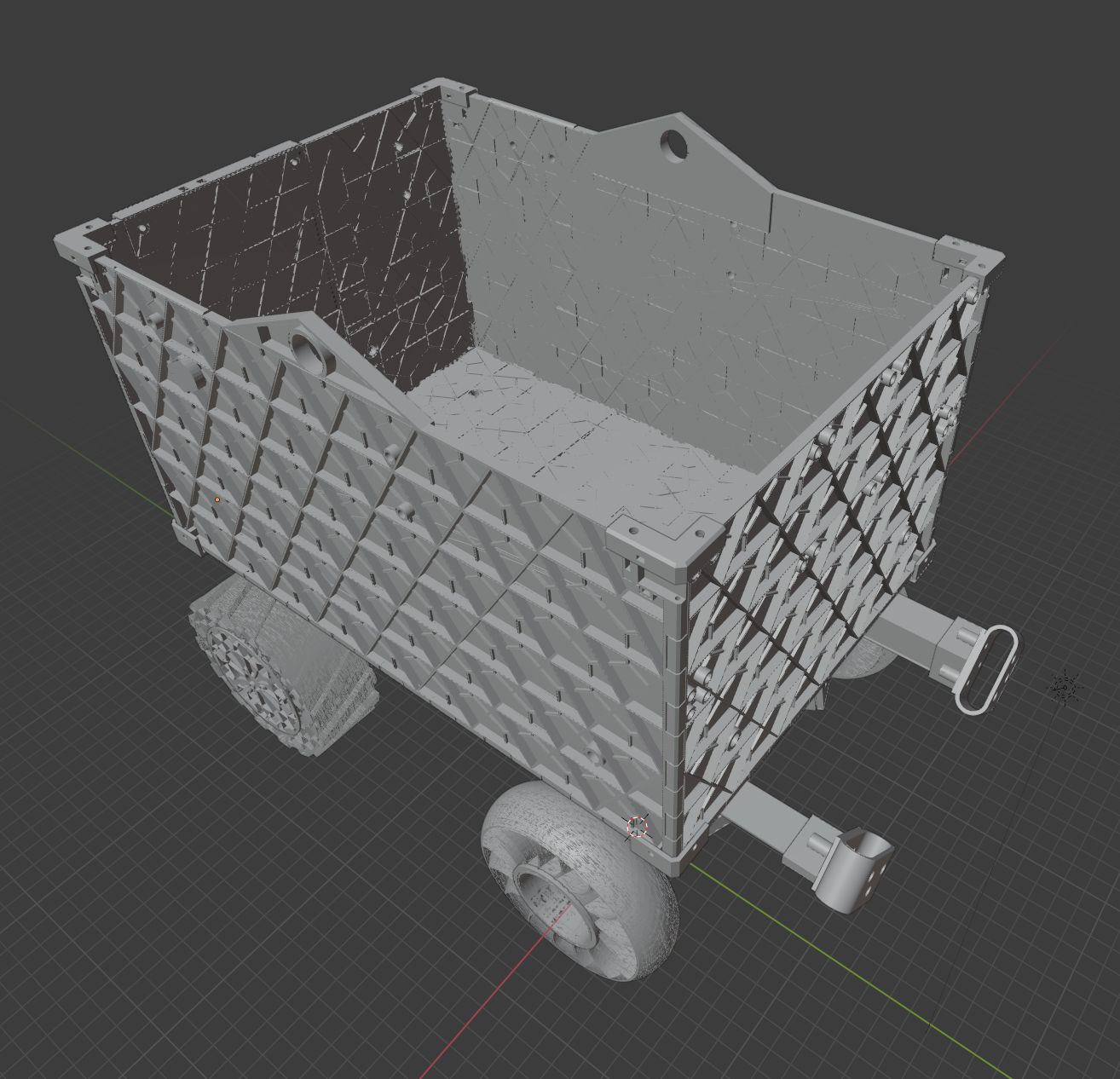
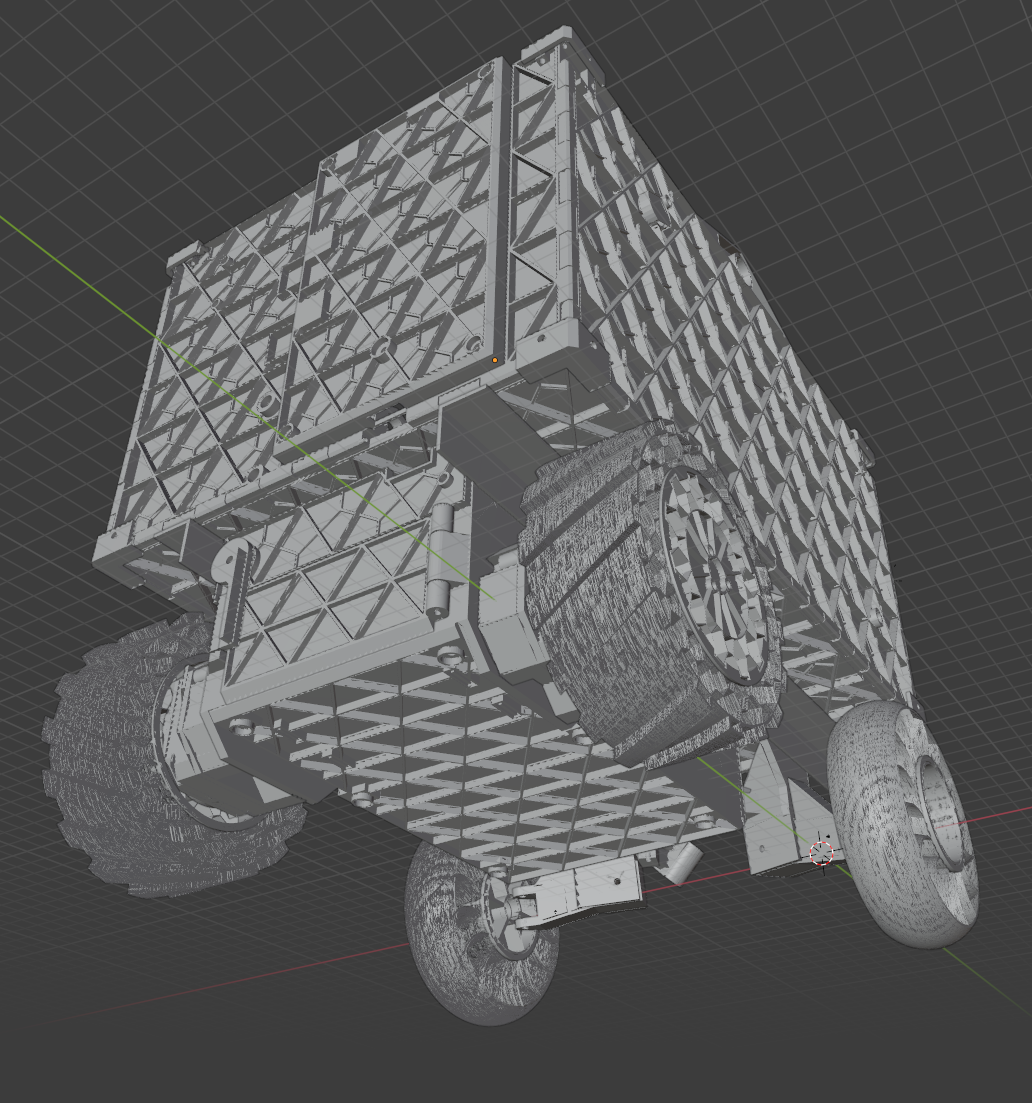
CAD mockup
05/04/2022 at 17:50 • 0 commentsThought it would be fun to join all the CAD files in Blender & see if they all fit together like they do in real life. Assemblies are real hard in Free CAD. Only the 3D printed parts were mocked up. It didn't really serve any purpose. There are no model viewers on the internet which can show the 150MB file. The Blender model allows some limited teardowns. Making an online model viewer which allowed rotating around it, hiding parts, simulating the moving parts would be hard & no-one would use it. No-one goes around loading random web pages like they did 30 years ago.
![]()
![]()
![]()
![]()
![]()
-
Steering failure, motor failure, container replacement, suspension upgrade
04/23/2022 at 00:29 • 0 comments![]()
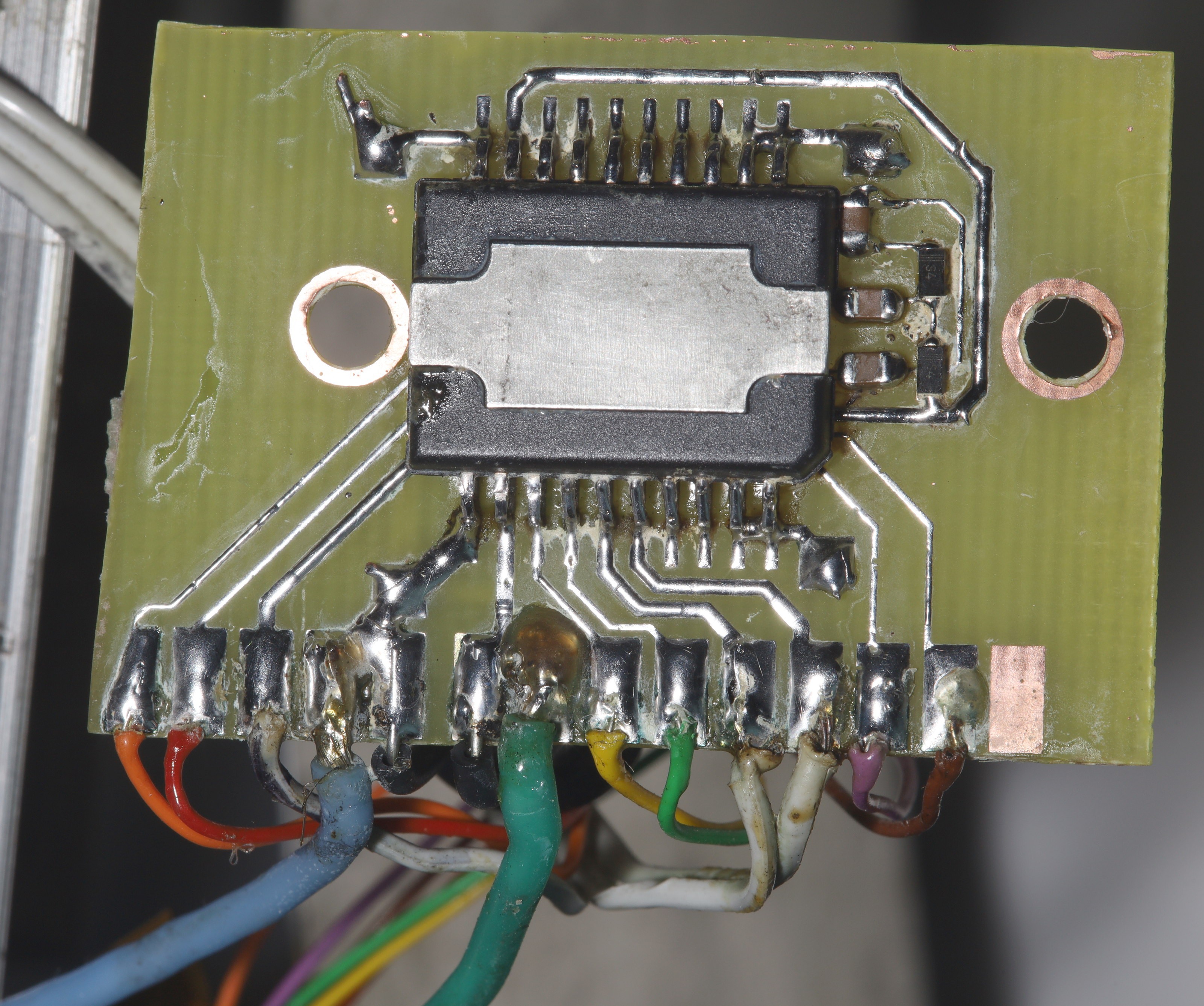
The last steering failures were narrowed down to duct tape brushing the inside of the wheels. This generated static electricity which intermittently reset the servo, burned out motor controllers, or reset the mane confuser. This discovery was of course aided by rewinding a single motor phase & discovering the motor controller got fried.
![]()
![]()
The L6234 is no longer made, so the next replacement is going to require moving the camera motor to PWM from its L6234. It only used an L6234 because the source code was already done. The lion kingdom has always driven 360 deg servos with H bridges instead of PWM because the 1st robots used TTL logic instead of microcontrollers. It was easier to make DC than PWM with those circuits.
Anyways, after that replacement, the lion kingdom got a shock 1 day & realized the truck had a voltage from driving around. The duct tape flaps were supposed to keep dirt out of the motors, but they were also shaped like van de graf generators. Cutting off the flaps ended the servo failures once again. This leaves pushrod wear, servo pot wear, servo motor wear, stick controller water intrusion, broken traces, & static electricity as the causes of steering failure.
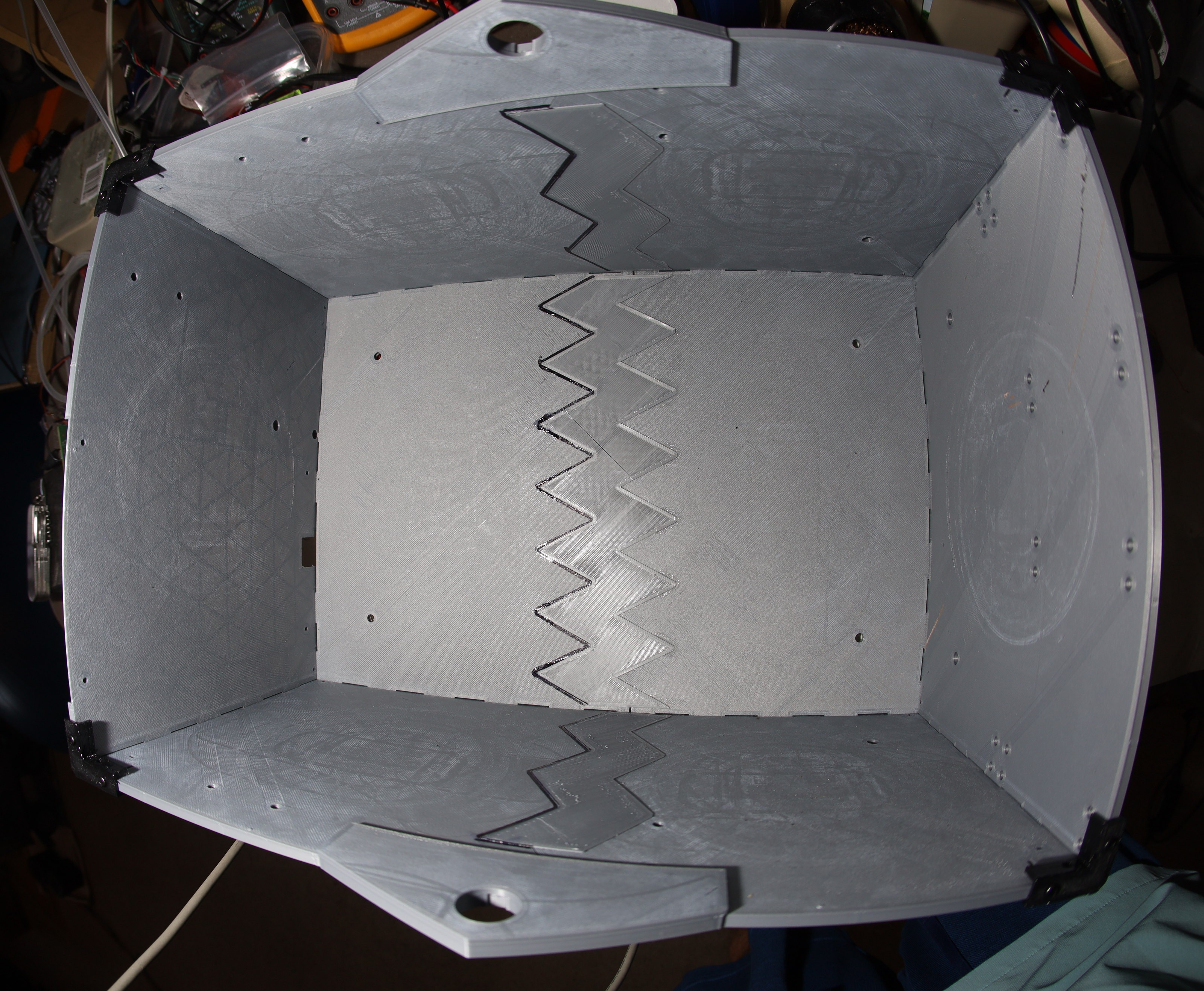
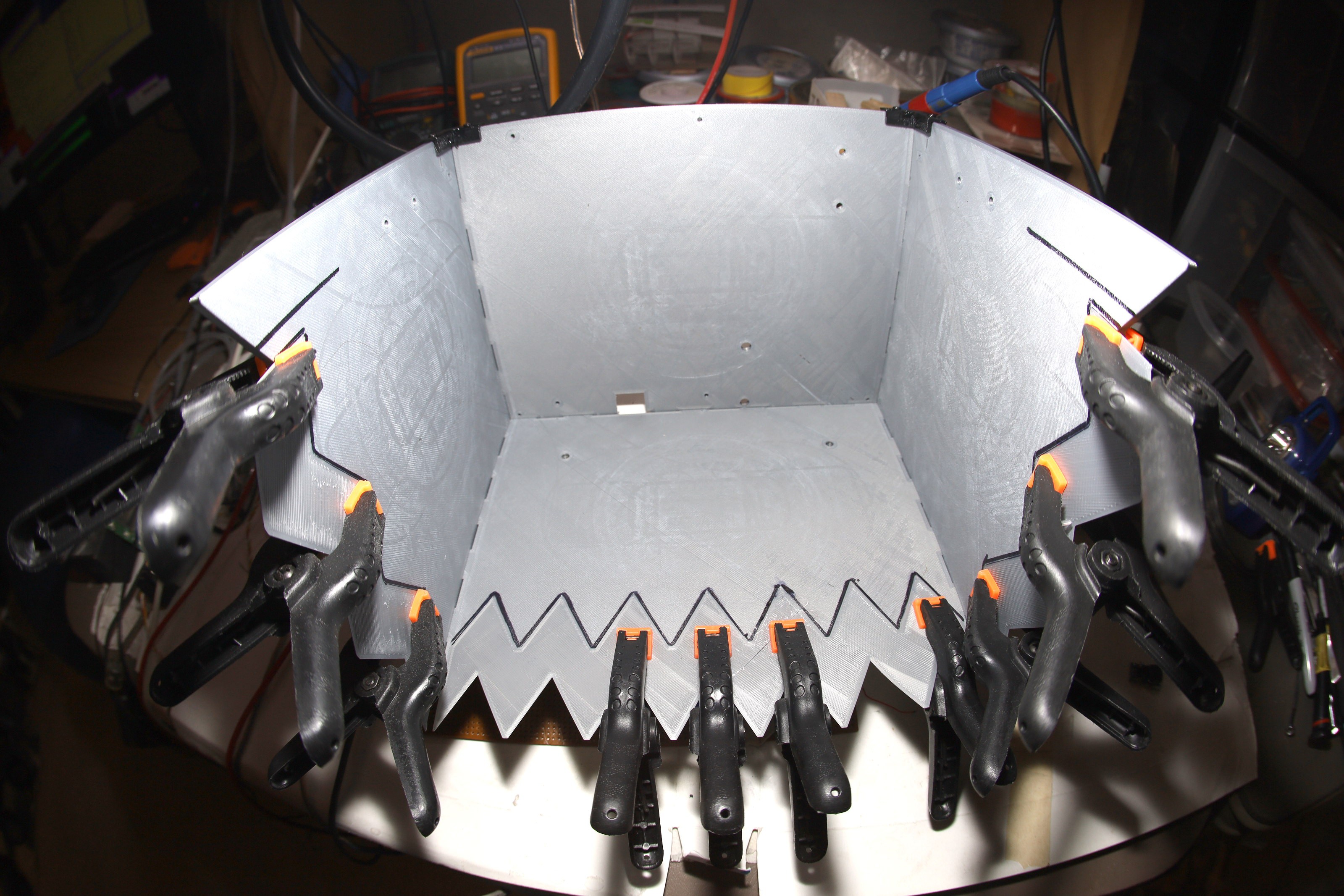
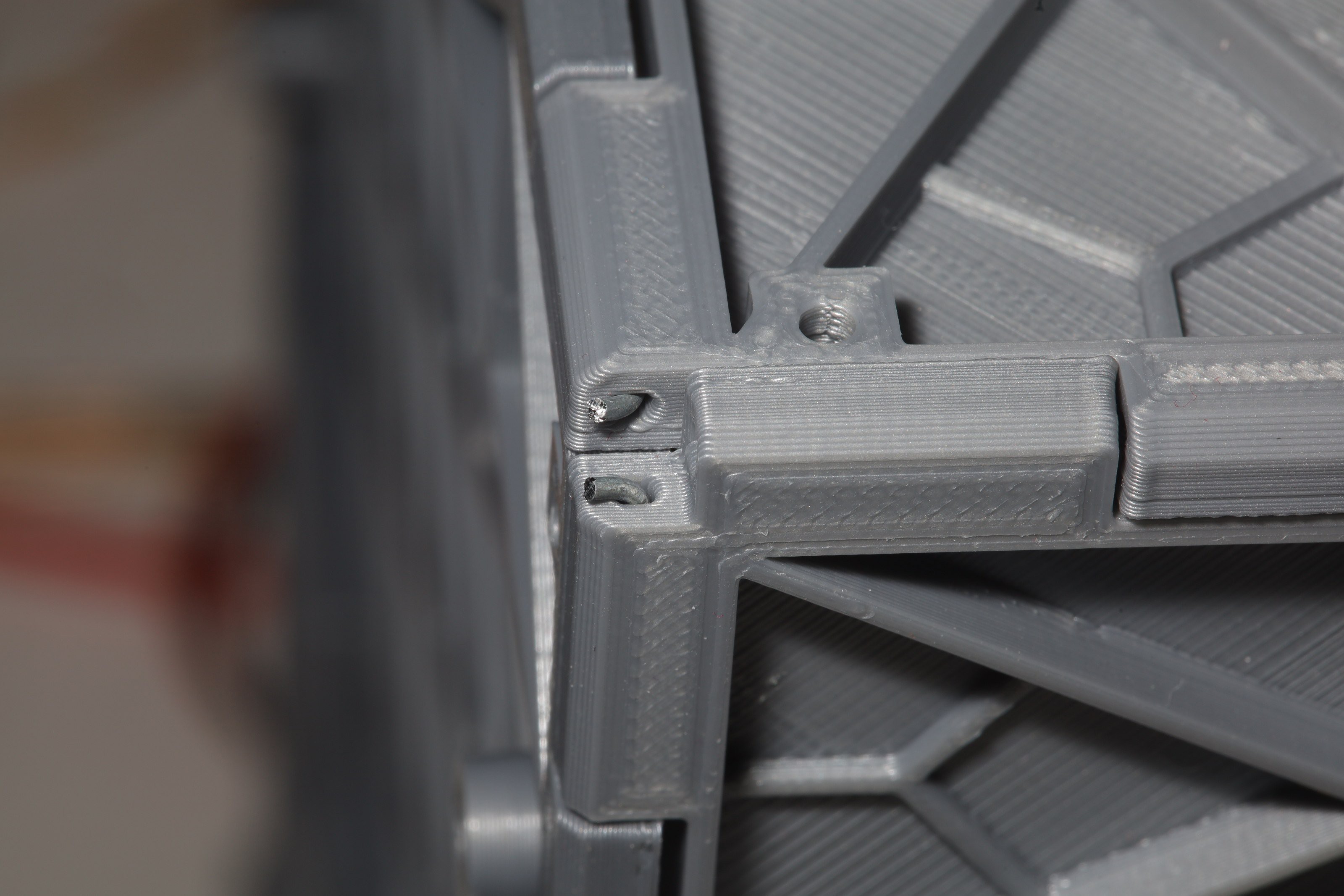
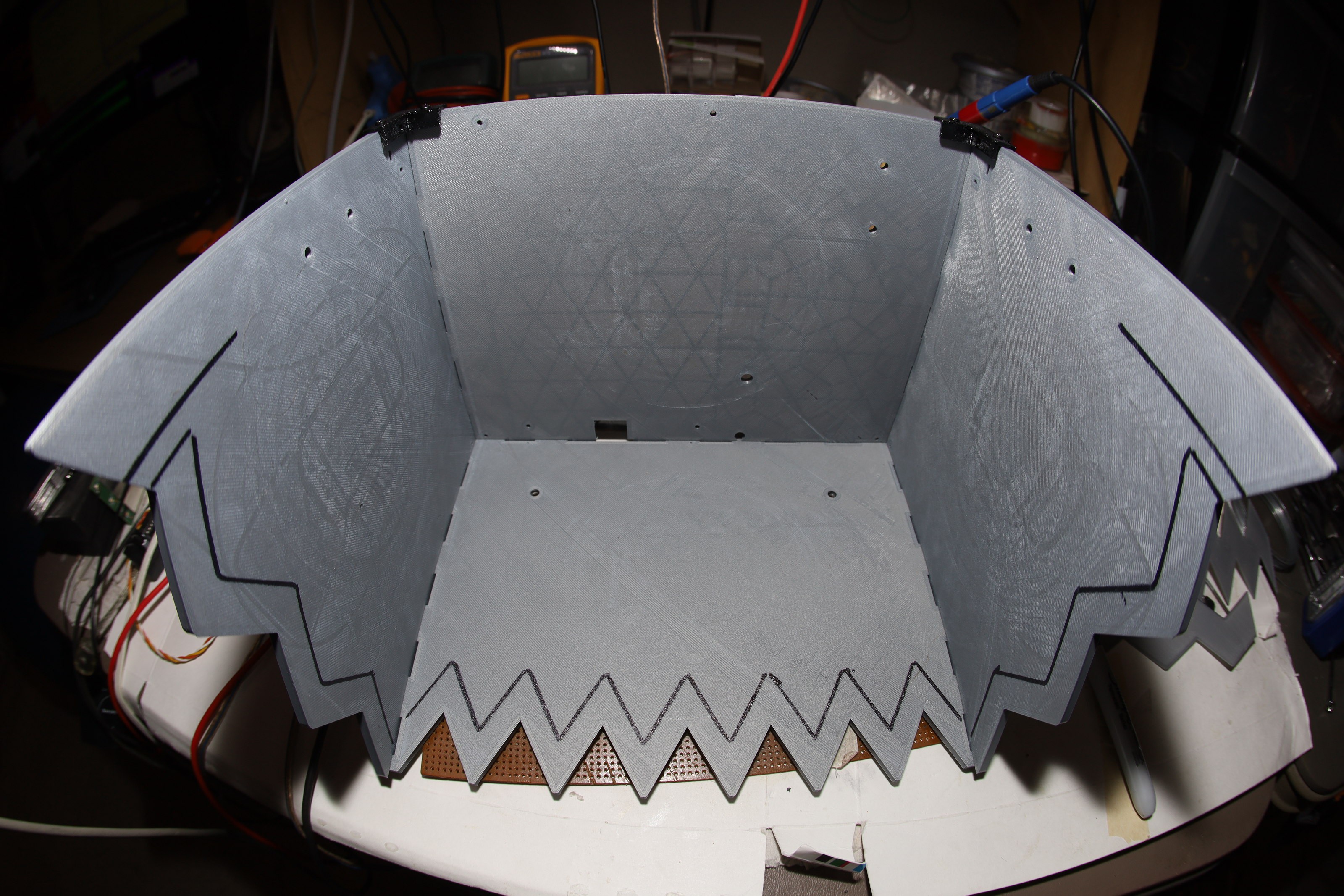
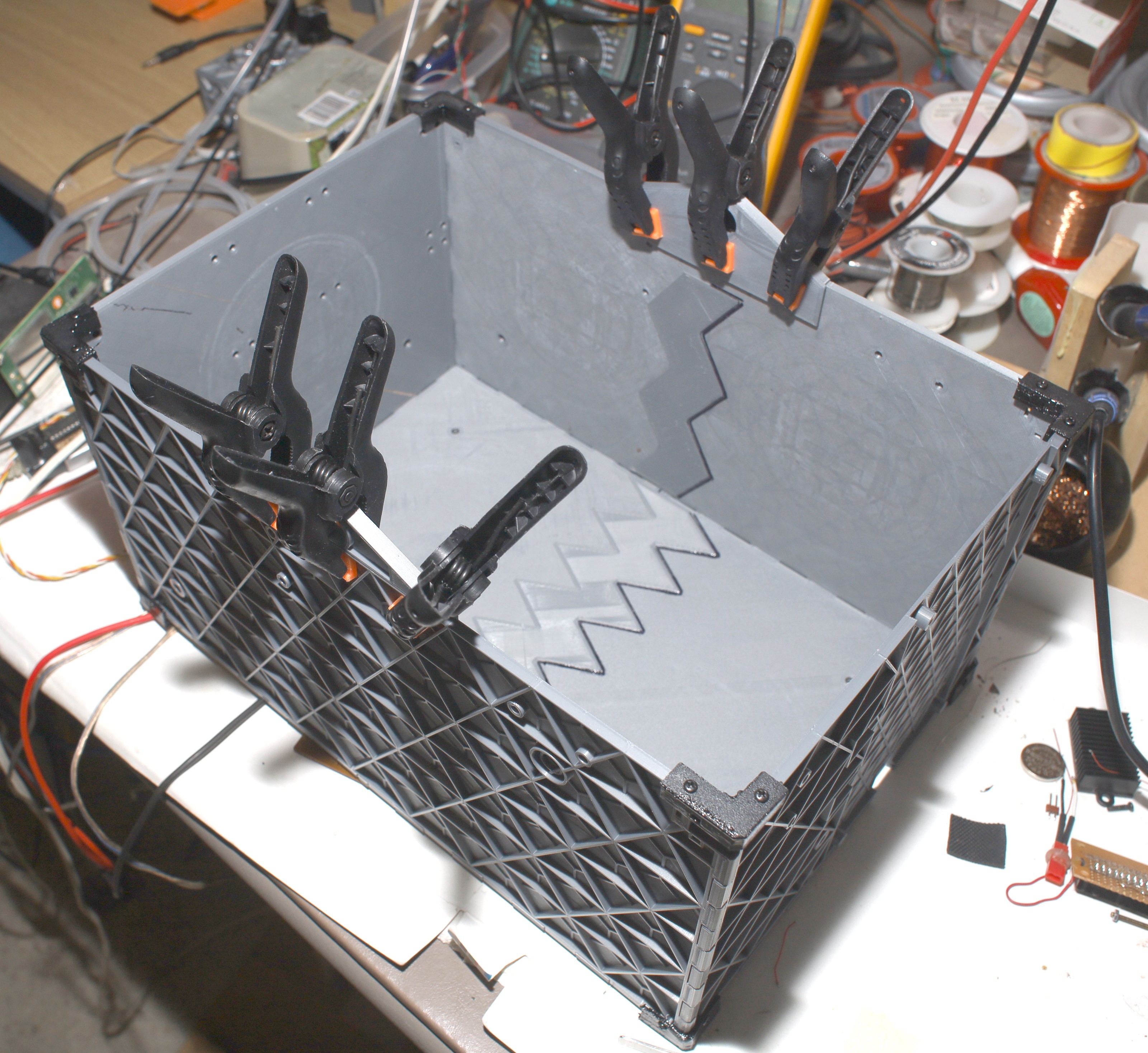
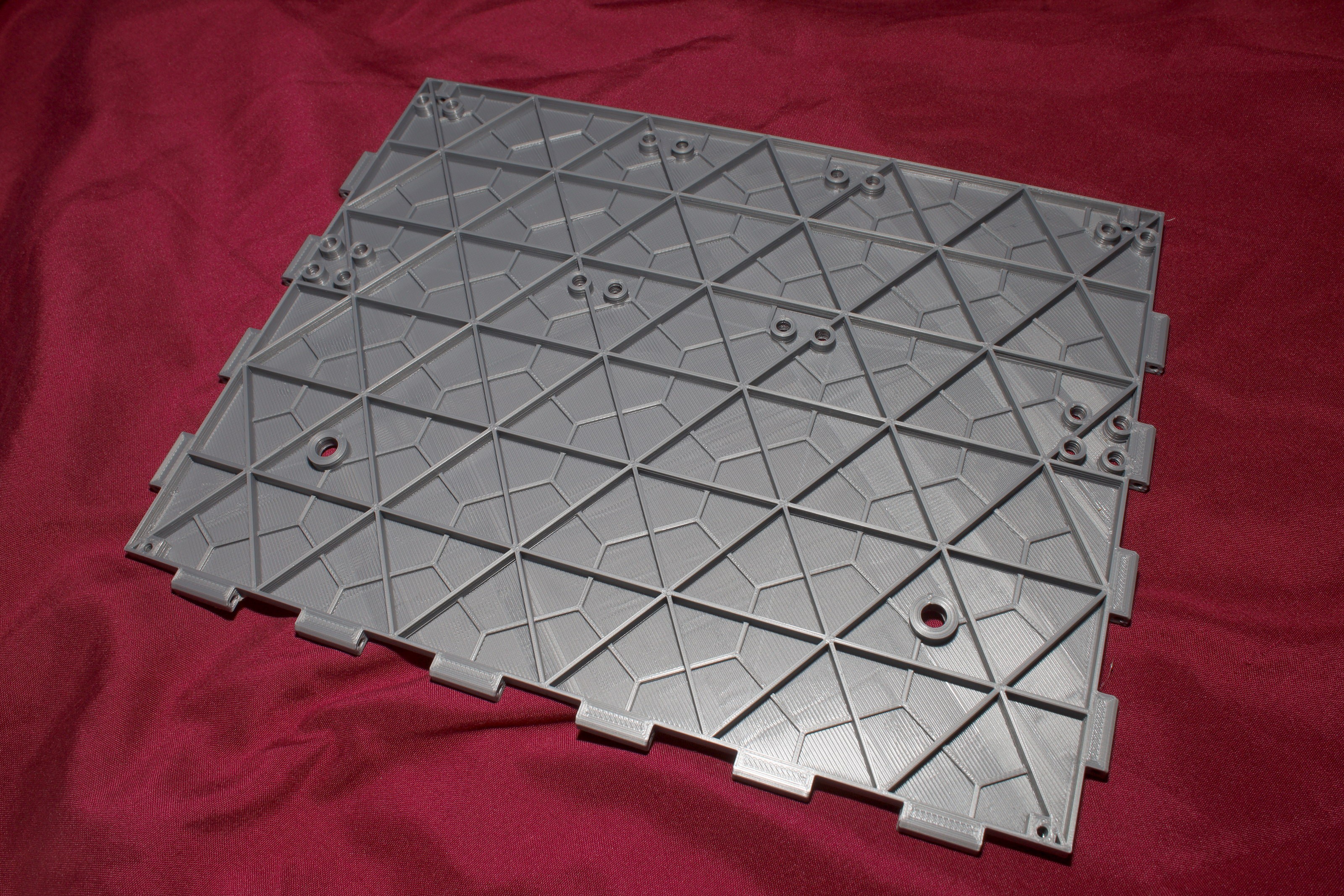
The old container was near its end of life, so another was printed.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
PLA has proven a lot weaker than coroplastic. It's lucky to go 6 months.
![]()
A new wheel fork was printed to try to make it more rigid. Helas most of the flex is on the ends.
Manually drying the controllers before charging them has proven a viable solution to the water intrusion. This is 1 area where a custom charger with longer range than Qi is needed. The charger needs a blower. to dry off the controller.