For some time I've wanted a simple hand-held altimeter that is easy to read and can be used in the car or while hiking. There are plenty of smartphone apps for this but they can be awkward: pull the phone out, unlock it, swipe for the appl, etc.. Sometimes it is just nice to have a dedicated device.
I finally got around to building it because I needed to develop I2C/SPI routines for another project and the barometric sensor I had been considering supported both.
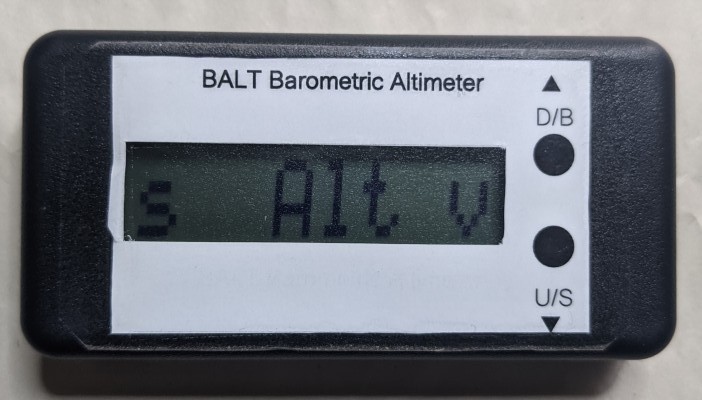
FEATURES & SPECIFICATIONS- 8 digit, 12mm (0.472") tall, high contrast transflective LCD
- User activated back-light for nighttime use
- Displays altitude, accumulated climb/descent, vertical speed, temperature, pressure, and compensation
- English or metric units
- Compensation settable in feet, meters, inches of mercury (Hg), or millibars (mbar)
- Sleep and deep sleep (off) to conserve battery life
- Adjustable off time from 0 (always on) to 12 hours, default 30 minutes
- Accuracy: +/- 1.5% of displayed altitude
- Operating temperature range -20 to +70C
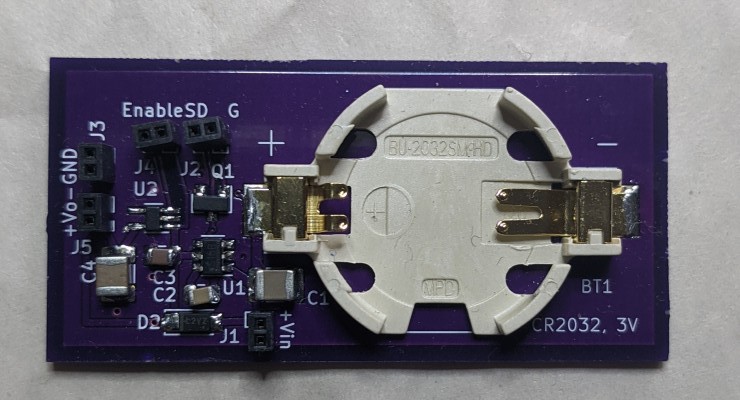
- Single CR2032 3V lithium battery
- Dimensions (LxWxH) 8.95cm x 4.49cm x 1.87cm (3.52" x 1.77" x 0.74")
NO WARRANTY & DISCLAIMER
THIS UNIT IS NOT WARRANTED FOR ANY USE AND THE USER ASSUMES ALL RISK & RESPONSIBILITY IN ESTABLISHING ITS SUITABILITY & FITNESS FOR A PARTICULAR USE.