-
Arm Update
10/29/2021 at 19:59 • 0 commentsThe forearm was bugging me, so I changed the shape
![]()
-
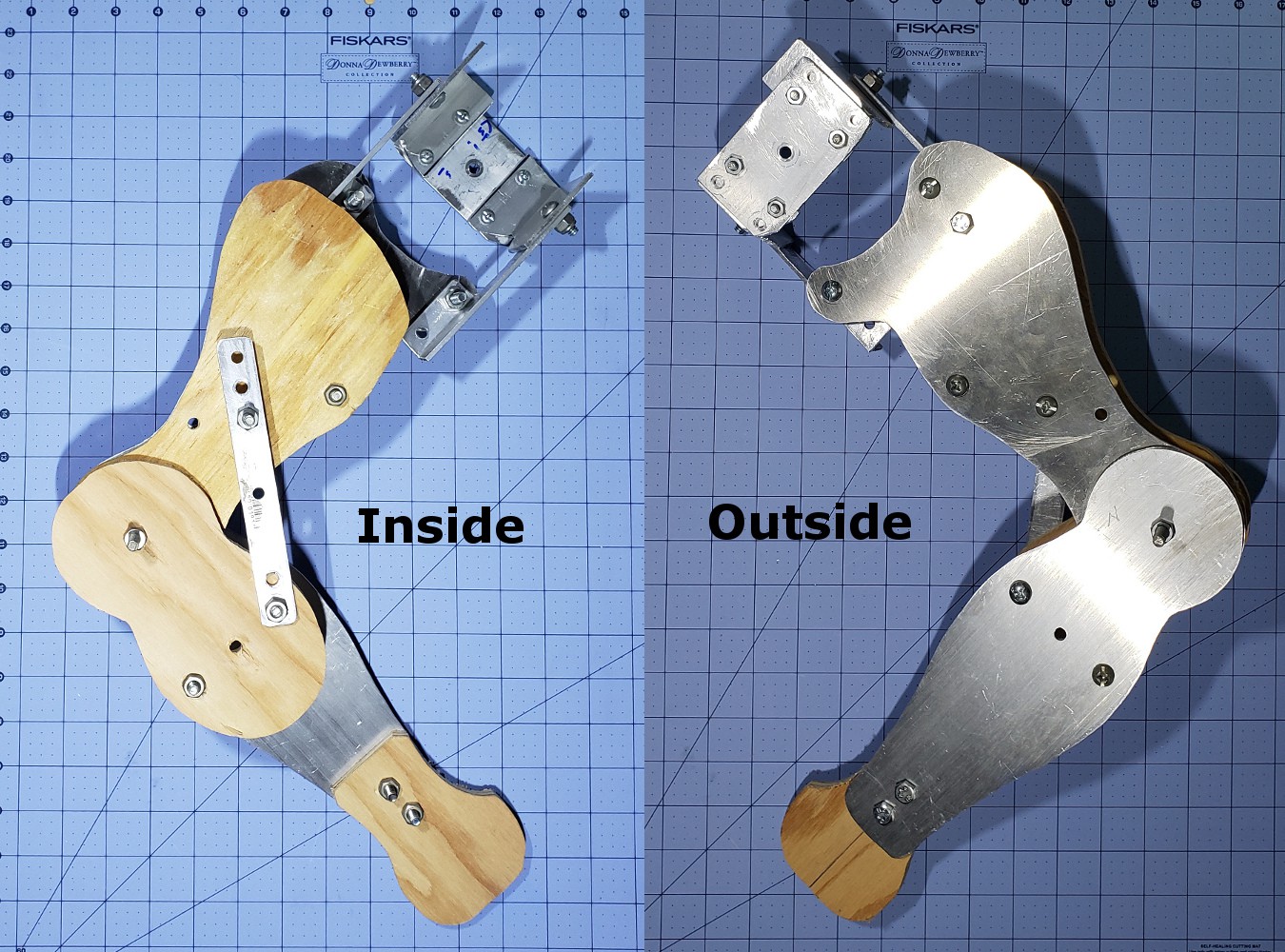
Slimmer arms for 3" kinematic actuator
10/25/2021 at 23:08 • 0 commentsEarlier I mocked out some arms to be used with Dynamic Actuators which are about 4" in diameter. There are 2 problems with the arms. Firstly the torso with 4 actuators is a little heavy for dynamic actuators. Secondly, the arms look a little husky. Recently I found these...
https://www.robotshop.com/en/my-actuator-rmd-x6-s2-brushless-dc-gear-servo-motor-136-mc300a.html
They have a 36x gearbox, so I don't think they are back drivable, and hench not dynamic? But at 36x they have a little more torque, so I could use them with my 4 axis torso. Secondly they are 3" diameter so they look alittle sleaker. I made a second set of arms for the 3" 36x actuator. I think if someone wanted to make a "sport" robot, you could use a 2 axis torso with a rigid spine in the rib area, and use 4" dynamic actuators. If you didn't care about dynamics you could use a 4 axis spine with the 3" 36x actuator with the sleaker arms.
![]()
-
Gaming Robot Update, Drive Box and Shoulders
07/17/2021 at 02:26 • 0 commentsUpdates that can be seen in this video...
aluminum support plates in drive box
sliding tension adjustable motor mounts
1/16" kevlar control lines
doubled up u-bolt clamps to anchor control lines
Lumenier LU8 Pro motors closer to body
10T to 18T timing belt drive
shoulder actuator mounts attached to spine
shoulder actuator place holders (temporary)
shoulder blade mounts attached to spine.
poly-carbonate should blades, 2 layers of 3/32" -
Arm Update
07/01/2021 at 23:05 • 0 commentsRecently worked out an arm shape I can live with. They look a bit "aggressive". My hope is that I can decorate the large looking triceps so that the forward portion looks like the arm, and a rearward portion looks like armor of some sort or maybe a crazy fashionable fluff of something. We'll see. Keep in mind I'm trying to keep all 3 actuators for the arm on the arm, and off the body. I think if I was building a nimble quad like Cheetah or Spot, this wouldn't work as well. I'll just have to keep motions slow and smooth.
![]()
Gaming Robot
A robot to play NPCs in an Augmented Reality fiction or role playing game. This robot can also be used to produce media content.