This project was developed in partnership with Robô Lúdico School and JLCPCB Factory that offers 5 free PCBs of Arduino Compatible Board.
Your robot with wheels will not work on some terrains! Read on to understand this problem and how to resolve it. Most mobile robots are built with wheels.
See the robot with wheels presented below.

They are great for navigation on flat terrain and with few irregularities, but present great difficulties for operations on terrain with high irregularity.
Why does this defect happen with robot with wheels, and what are its consequences?
This is because the wheels lock or slide on the surface of the terrain. This prevents the robot from moving and arriving at its destination.
In addition, the wheels cannot overcome large obstacles on the ground. For this, the robot with wheels would need to be twice the size of the obstacle and this would make the wheel structure unfeasible to be built.
To solve this situation, it is ideal to use a track robot.
In this article you will learn:
- Build a robot capable of moving around different types of terrain (here I will show you how to increase your robot's mobility for any type of terrain)
- How the structure of a track works
- How to obtain the control board of the treadmill robot
- The reasons that guarantee the superiority of the structure of the track robot in relation to a robot with wheels.
See an example of a track robot.

Mobile robots with wheels are the best tools when we want to carry objects and explore environments that pose risks to human life. However, these terrains cannot be uneven, as this prevents the mobility of the robot with wheels.
For this case, I recommend that you use a track robot because the treadmill offers greater traction and reduces slippage.
The tracks offer a better way of getting around to travel in rough, uneven, and loose terrain and pass through various obstacles.
Now, you will learn how to build a mobile robot with a track, and we will talk about its main advantages and disadvantages in relation to the robot with wheels.
Now, we'll learn all points presented above.
What is a track robot?
These robots use treadmills instead of wheels and are widely used in rough, uneven, and loose terrain. The treadmills allow the robot to pass through several obstacles because it has a larger area of contact with the ground and offers greater traction to the robot.
How tracks are constructed?
The project was built in the shape of a tank and its internal structure has all the electronic components that will process the signal and perform the displacement of the robot.
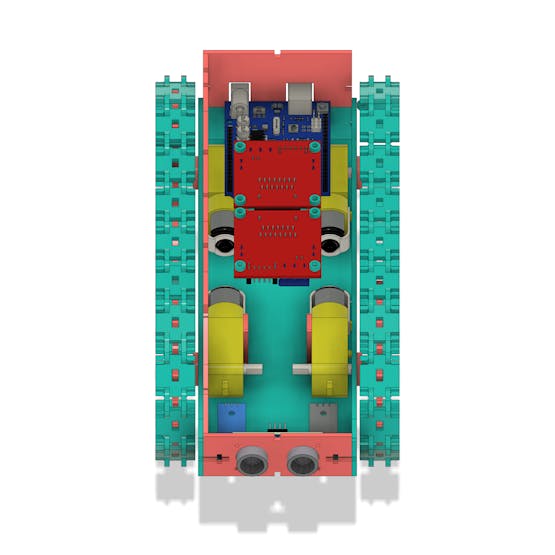
Figure 2 illustrates the robot's internal region.
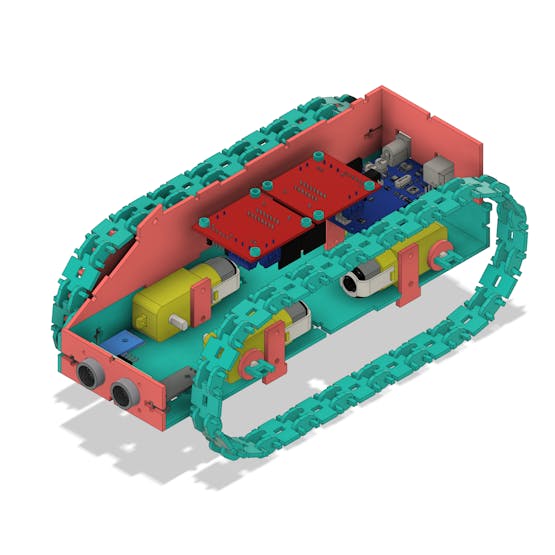
In its lower internal structure, it is possible to observe the 4 motors (each with two lateral supports) and their respective sprockets, as well as the two line-following sensors.
The DC motors and driver
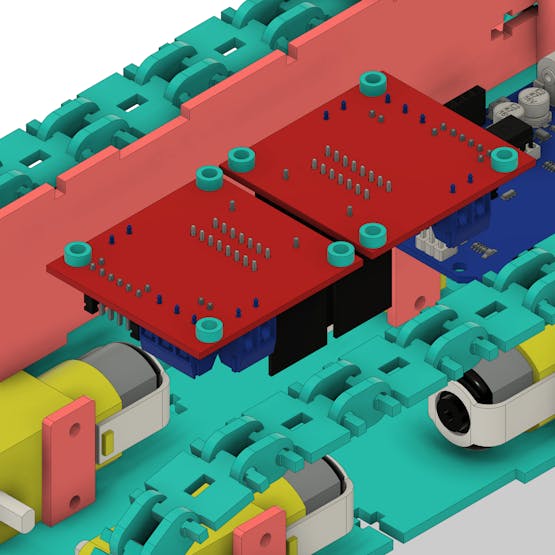
The robot consists of 4 motors and two drive drivers. See the figure below.
The drivers are responsible for receiving the command signals from the Arduino and activating / deactivating the motors. For each pair of engines we will use an L293D driver.
This driver can control from the speed of the robot's sprockets through the PWM pins of the Arduino, to the direction of rotation, being able to control up to two DC motors.
The drivers were installed on the inner ceiling surface, next to the Arduino Uno.
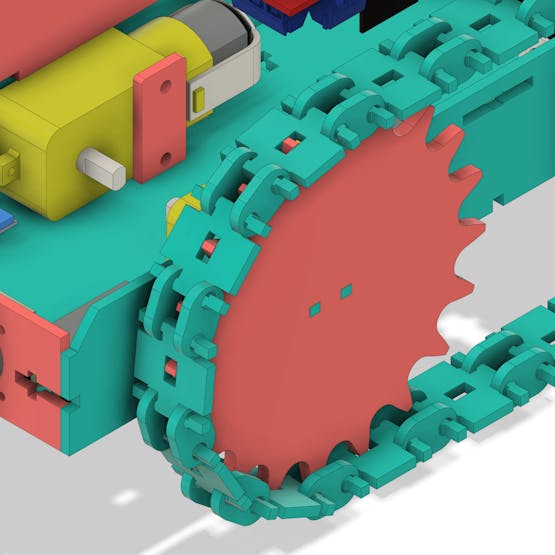
The motors are coupled to a sprocket. It is responsible for transmitting the movement to the conveyor, which is attached to its structure.
The structure of the track is shown below. It was built from the coupling of several parts.
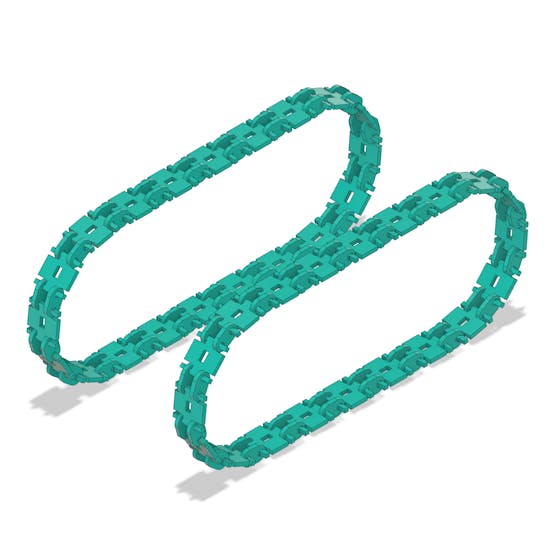
This structure is basically divided into two categories: the link and the wheel connection. The connection is responsible for connecting the cogwheel, and they unite them.
Figure 5 illustrates the mechanism of the links, connections, and sprocket. The connections are responsible for engaging...
Read more »