 Bartosz Starzyk
Bartosz StarzykCel projektu:
Stworzenie modelu samochodu terenowego z zawieszeniem adaptacyjnym na bazie klocków Lego
Wykorzystane oprogramowanie:
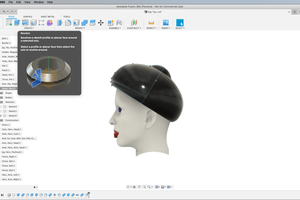
-Fusion 360
-Tinkercad
Członkowie projektu:
-Mikołaj Żelazny
-Jakub Wojciechowski
-Jan Pudełek
-Tymoteusz Walczak
-Daniel Jóźwik
-Jacek Hożejowski
-Robert Sowa
-Bartosz Starzyk
-Hubert Janiec
-Jakub Mikulski

 Tea B
Tea B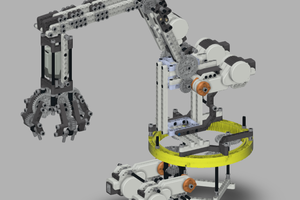
 Greg Zumwalt
Greg Zumwalt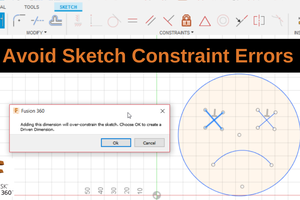
 Vladimir
Vladimir
Nice thing. But small tires. You have to actually build one of your robots. I do like your mechanic transmission https://hackaday.io/project/25322-automatyczna-skrzynia-biegw-v2