Naman Pushp
Naman Pushp-
Design #5 - Prototype V2
05/21/2021 at 07:51 • 0 commentsBackground
This design did not entail many major structural changes, rather cosmetic ones. Only minor improvements were made to the design, based on more recent considerations, the bulk of the work was done to make the CAD more suitable for renders, so that it could be effectively presented on our website and to potential investors/customers. This design also reflected the new manufacturing processes. While this didn’t lead to a particularly significant shift in the design itself, we had initially begun with a plan to 3D print the drone, then moving on to sheet metal fabrication and finally settling on a composite wet layup process for the body. The new coloring also more accurately reflects the final finish on the drone
-
Design #4 - Prototype
05/21/2021 at 07:50 • 0 commentsBackground
This design was a similar redesign of the second blended wing model, however in this case the visual changes were not as striking. The main intent of this model was not to change the underlying structure of the drone, rather to optimize the design for structural stability and manufacturability. This design was then rigorously tested through various simulations and was finally validated for use.
Design Process
Although this design took far less time to make than the others, the validation process took months, making it the longest process by far. The design itself was simplified to be defined more through lofts and extrudes rather than an organic environment, to allow for a greater ease of manufacturability. The ailerons have been made larger to improve maneuverability in the air, and many of the fillets
Simulations
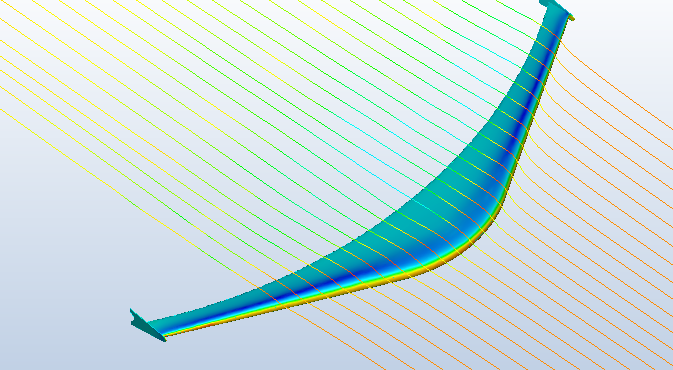
CFD
The simulation involved a basic CFD wind tunnel analysis to get an idea of the pressures and wind forces involved on the drone. These, along with hand calculations (refer to the calculations document) provided a solid framework for the FEA simulations.
FEA
Compared to CFD, the FEA validation process was far more complex and involved many more steps. Initially, basic elements of the design were validated, such as modal frequency and wind forces, to make sure the drone could handle basic flight. After that, the major analysis was done through a series of drop tests in Ansys, calculating whether the frame could handle a 21m drop from various angles and trajectories without plastic deformation
-
Design #3 - Blended Wing V2
05/21/2021 at 07:49 • 0 commentsBackground
This design was a complete redesign of the first blended wing model, but retained many of the characteristics. This design was made organically, allowing for a larger middle section, which allows for enough space to store the electronics and the cargo. Since we had gained the relevant data and had created a document with the prototype design requirements the problem was better defined and we could refine the design. This design would now represent the final shape of the prototype, however certain details may change to accommodate the electronics.
Design Process
This design took a far more analytical approach and really improved on each part of the previous design. Firstly, the airfoil was selected based on a paper on BWB aircraft - NACA SC(2)-0518 in the center and the NACA SC (2)-0410 airfoil at the ends. Furthermore, the design itself was altered slightly in a t-spline environment to more precisely model the central section. The fillets near the winglets are smaller, to allow for easier cleaning without directing air over them.
-
Design #2 - Blended Wing V1
05/21/2021 at 07:42 • 0 commentsBackground
So this design was really marking the switch from what people imagine a ‘drone’ to look like, to one more in line with the requirements of a long-range delivery drone. A VTOL drone allows us to effectively glide and greatly increase our range, like a traditional fixed wing drone, yet the vertical take-off allows the drone to be installed almost anywhere, with minimal infrastructure.
Design Process
Although we had decided we needed a VTOL drone, VTOL is an incredibly broad field and we had to settle on a design. Since simplicity is one of our goals, we decided to go for a tail-sitter design.
Most other designs either involved additional propellers on the top for upward flight, which requires additional power, increases cost, and induces greater drag.
Another option were pivoting propellers, which would move the drone up, then rotate and act like traditional plane propellers. This design would increase complexity, and the existence of more moving parts would also reduce the longevity of each drone.
Finally, we settled on a tail-sitter, where the drone would sit vertically, take off, and roll 90 degrees to transition into fixed wing flight. We chose this because most of the complexity lies in the software, which we can existing open-source solutions for, and the only mechanical difference is the presence of a winglet to prop it up, which has the added benefit of preventing air from mixing at the tips of the wings, removing the need for vortex generators.
As for the design of the body itself, this initial version served more as a crude proof of concept. The airfoil was automatically generated by a program (airfoiltools) based on certain constraints, and the drone followed a generally aerodynamic shape, but there were no special considerations made to the detail of the design itself.
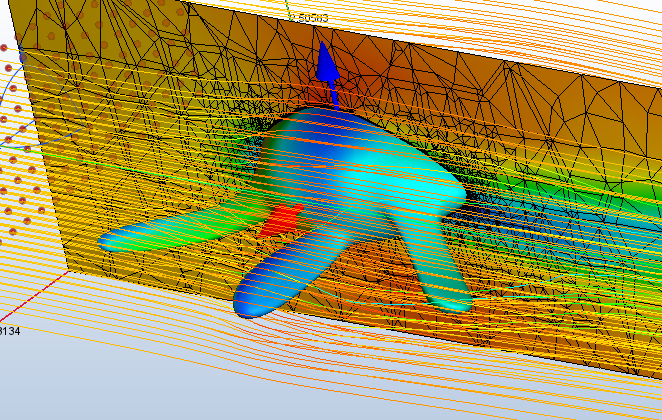
Simulations
The steady state simulation was performed by Naman using Autodesk CFD. This helped give a general idea of whether the design would work and gave positive results. The CFD also helped recognize the unintended effect of the winglet - it prevented the air from above and underneath from mixing.
-
Design #1 - The hexacopter
05/21/2021 at 07:40 • 0 commentsBackground
When the project first began, I was only aware of two drone types - fixed wing and multicopter. Although fixed wings were far more common for more sophisticated drone delivery services, multicopter designs were seeing some use in shorter range deliveries. Since the infrastructure for fixed wing drones is very high, requiring either a long runway or some kind of specialized launching system. Therefore, despite the massive range advantage of fixed-wind, the accessibility of multicopters led us to choose that design.
Design Process
The shape for this drone was quite unconventional, and didn’t seem to follow the design philosophies of any existing drone. The main difference is the usage of this drone is not like other drones. Since a majority of the movement is going to be in one direction, the drone only needs to be aerodynamic in one direction, therefore, the body was modeled after a teardrop, to ensure maximum aerodynamic efficiency. The supports for the propellers are roughly modeled after airplane wings, to further streamline the body.
The design used 6 wings, as based on our requirements, a quadcopter design would not have provided enough thrust, and an octocopter design would be too expensive to make.
Simulations
We conducted a simple steady-state wind tunnel simulation on the body to test the viability of such a design. Overall, the simulation showed promising results, however we were unable to get a transient state simulation complete before we decided to pivot to a VTOL design
OpenDrone
OpenDrone is a service that makes medical drone delivery accessible by eliminating the need for infrastructure