 deʃhipu
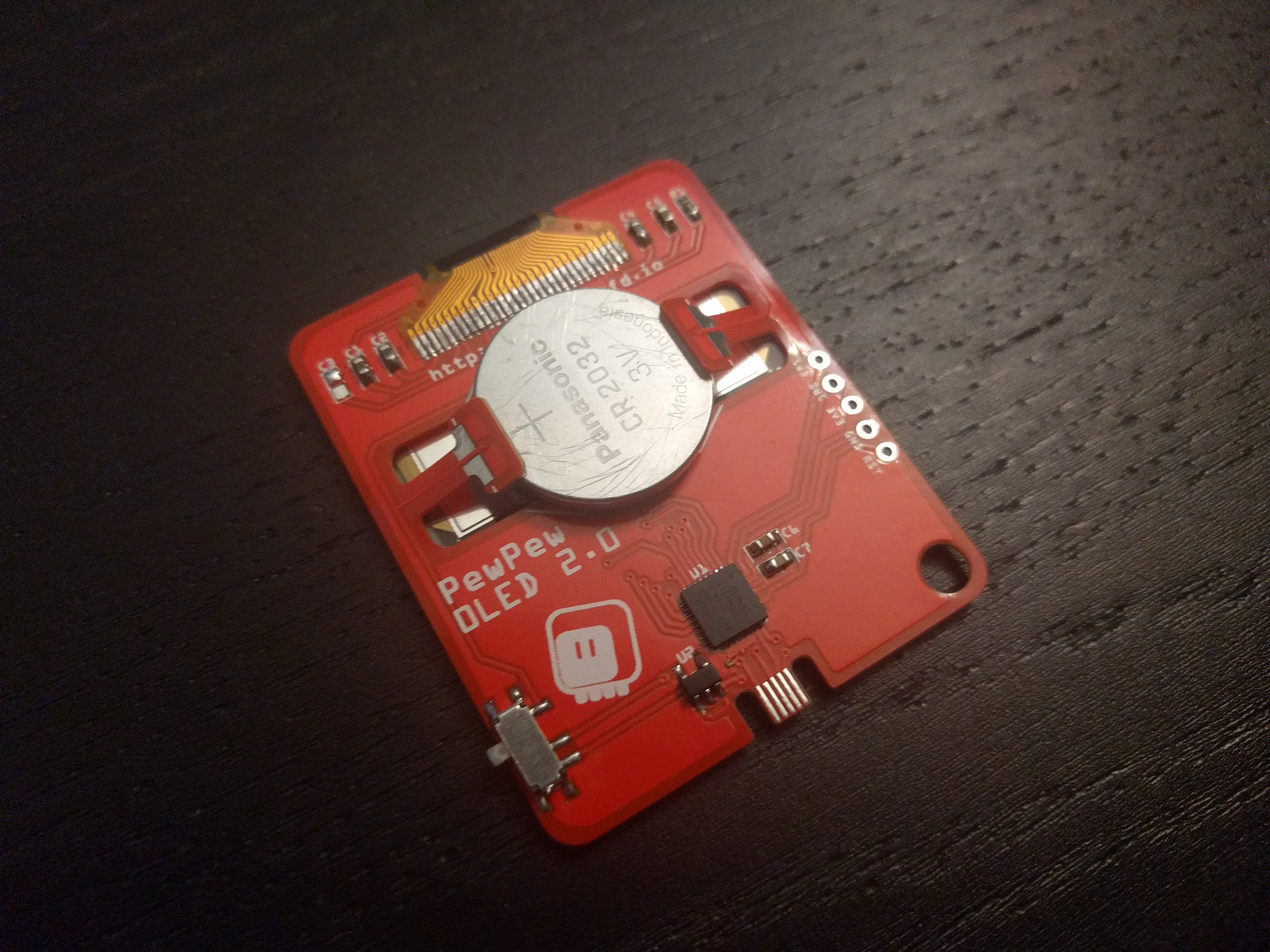
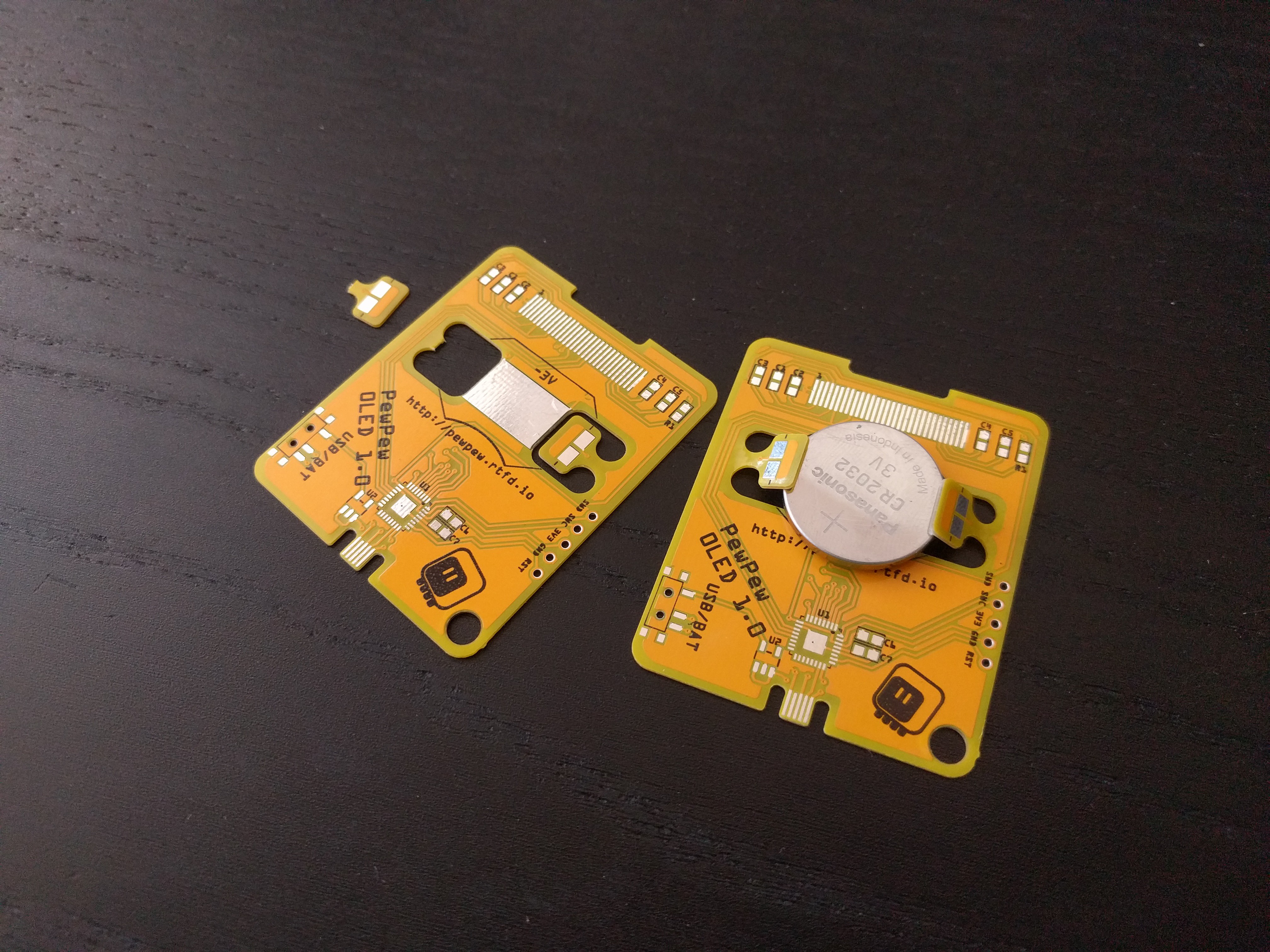
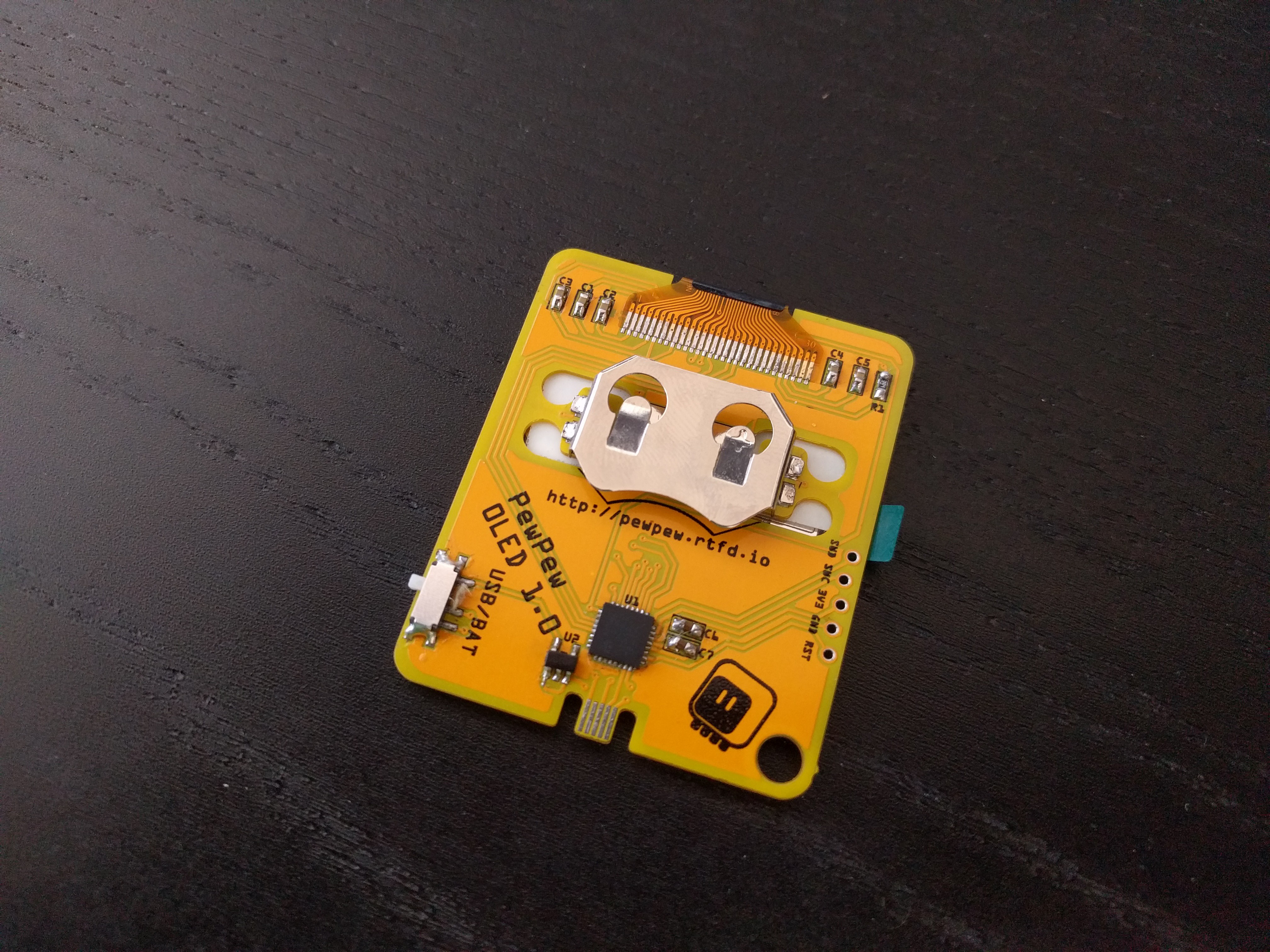
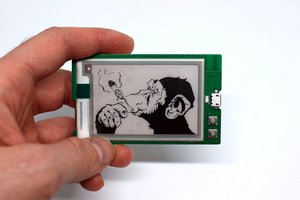
deʃhipuBlack-and-white graphics for games has its appeal, so I decided to revisit a prototype that I first made back in 2018 and a year later even managed to get the PewPew games to run on it.
But of course there needs to be some innovation and a challenge, so I decided to change two things:
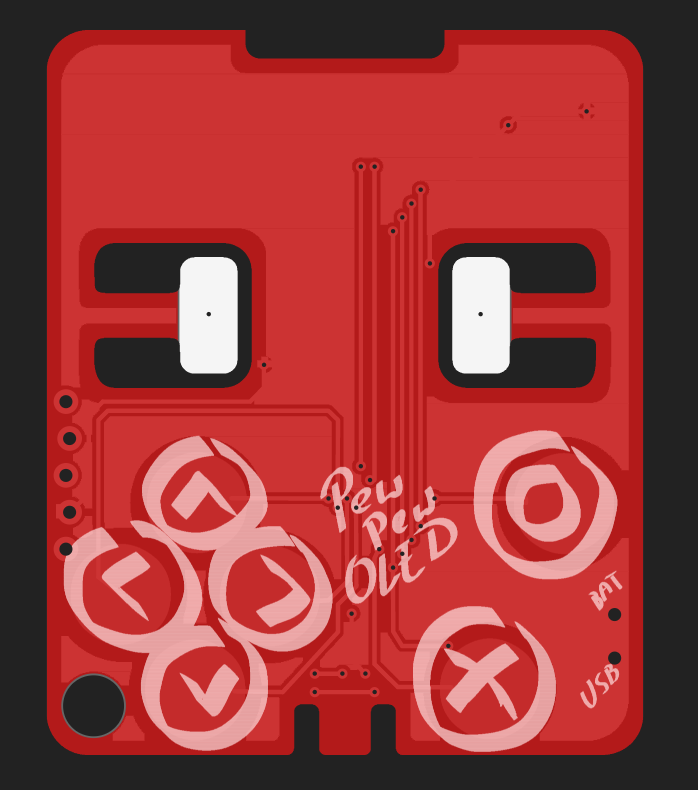
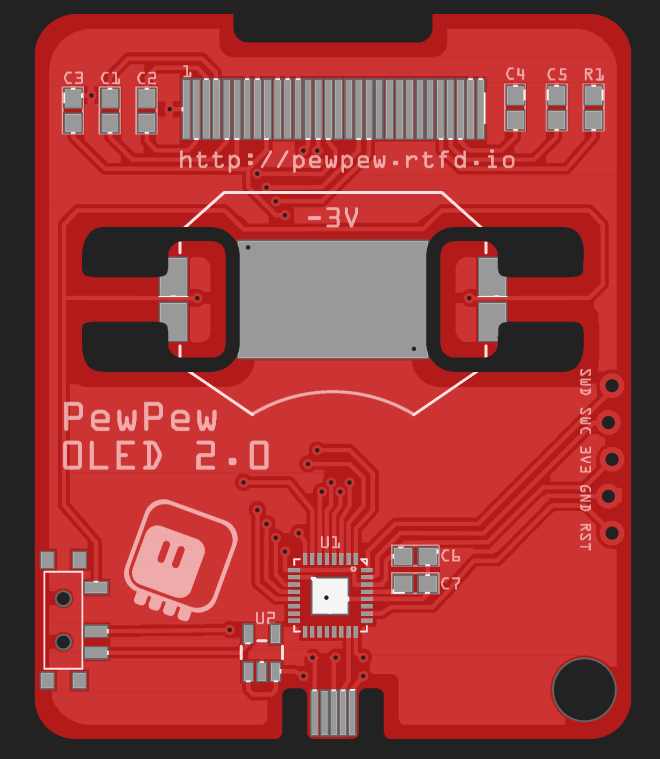
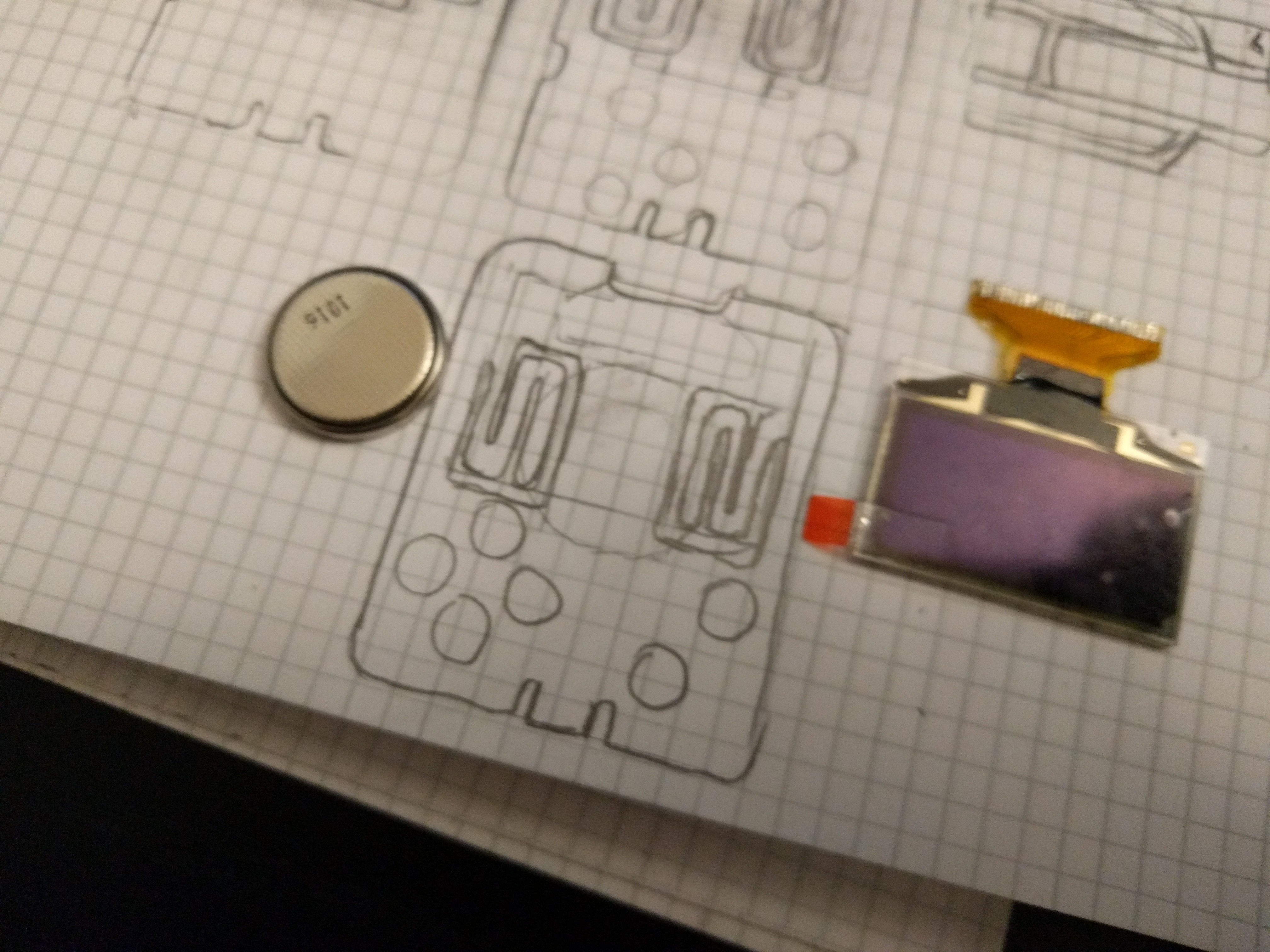
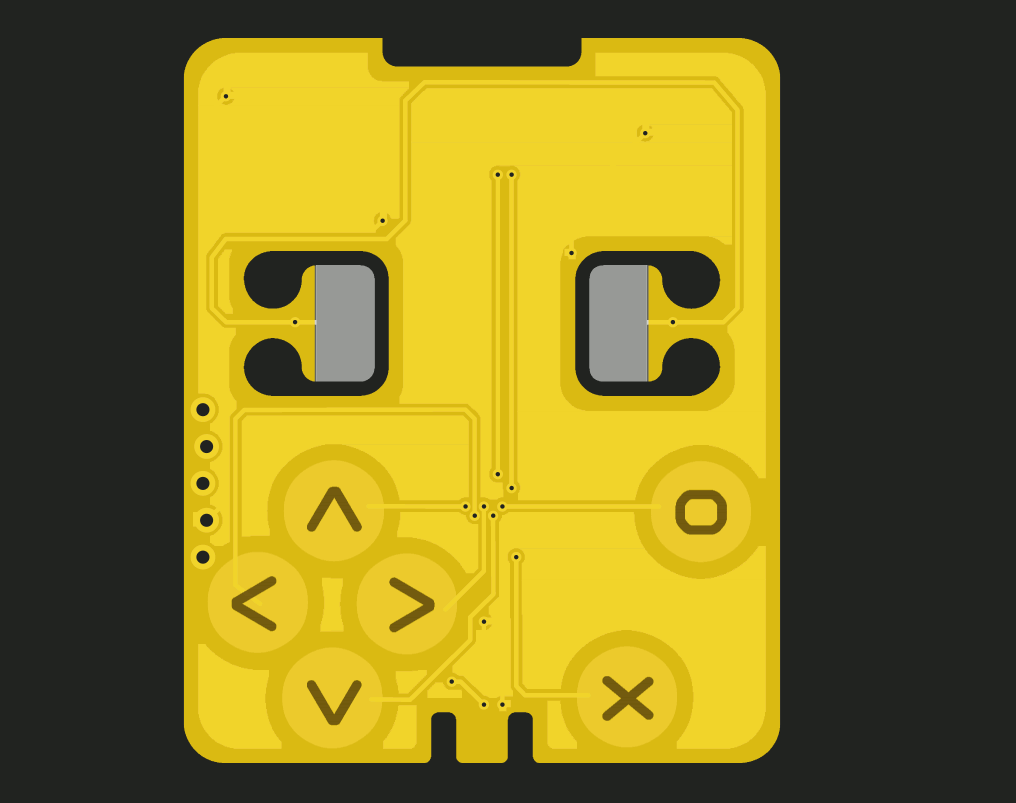
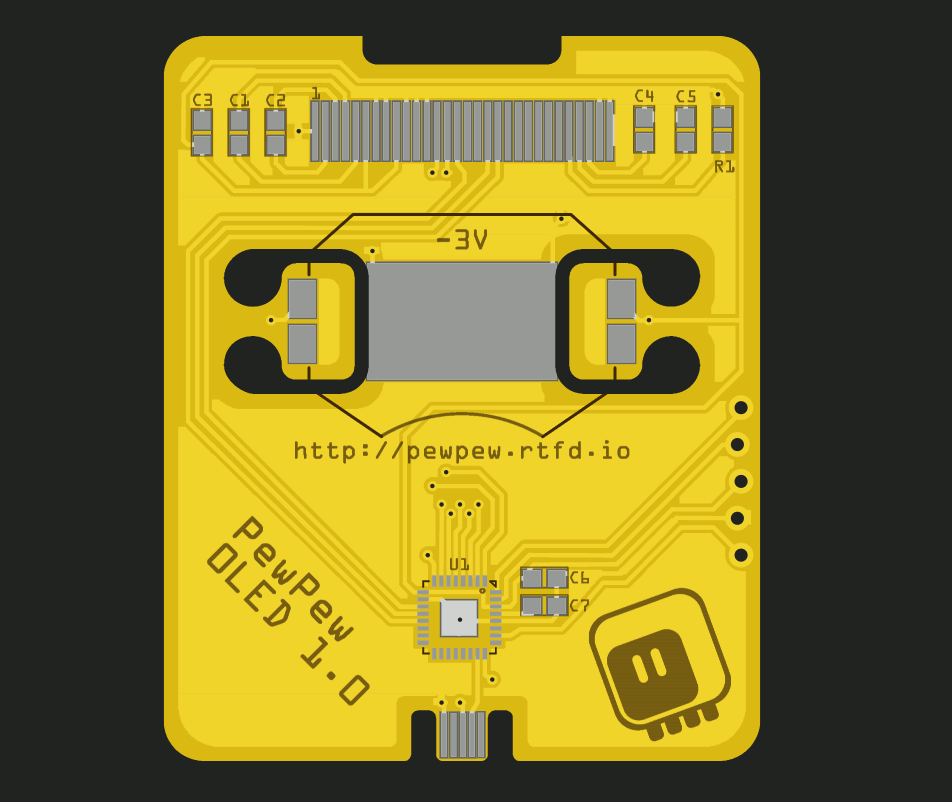
- make the hardware design even more minimal, with most parts, such as the buttons, the USB socket or the battery holder simply made out of the PCB itself, and
- develop a CircuitPython library for the OLED displays similar to #Stage, a Tile and Sprite Engine, but optimized for monochromatic games.
And of course that also means some new games will need to be written, to make sure that the library is usable.



 Dimitar
Dimitar

 kmatch98
kmatch98