Petar Crnjak
Petar Crnjak-
Added assembly instructions on github
09/13/2021 at 16:19 • 0 commentsIt will be updated regularly. Atm only mechanical assembly instructions!
https://github.com/PCrnjak/CM6_COBOT_ROBOT/blob/main/assembly_instructions_v1.pdf
-
S-Drive BLDC driver firmware
09/09/2021 at 15:23 • 0 commentshttps://github.com/PCrnjak/S-Drive-Firmware
PCB build files are in this repo:
-
CM6 control software github
09/09/2021 at 15:21 • 0 commentshttps://github.com/PCrnjak/CM6_control_software
Instructions on how to install and use it are in the github repo!!
-
CM6 main github page
08/31/2021 at 18:17 • 0 commentshttps://github.com/PCrnjak/CM6_COBOT_ROBOT
This is still work in progress but it will contain:
- Build instructions for the whole robot
- Production files for all PCBs
- BOMS
- Use guides
-
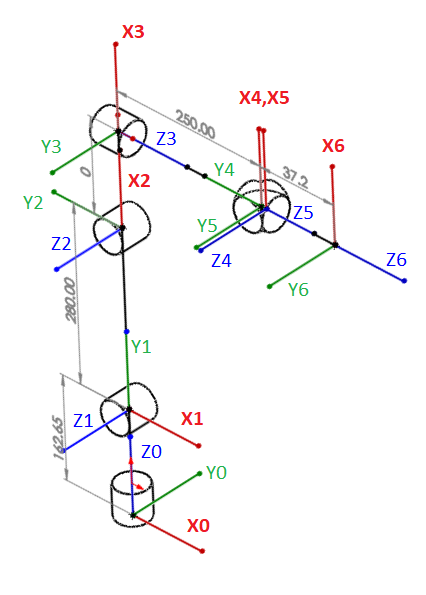
Kinematic diagram of the robot and Denavit-Hartenberg parameters
08/30/2021 at 17:17 • 0 comments![]()
So this is a kinematic diagram of the CM6 robotic arm. you can see that robot has a spherical wrist since axes Z5, Z4, and Z3 always intersect.
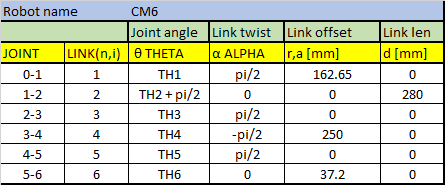
And here is DH table!
![]()
I also always like to have written what does every parameter mean since I forget every time so here they are! :D
Link offset = distance Zi-1 from Oi-1 to the intersection with Xi.
Link Length = Distance from Oi-1 and Oi measured along Xi
θ THETA = Rotation around Zi-1 to get Xi-1 to match Xi
α ALPHA = Rotation around Xi to get Zi-1 to match Zi (We are rotating frame Oi-1 around Xi)
-
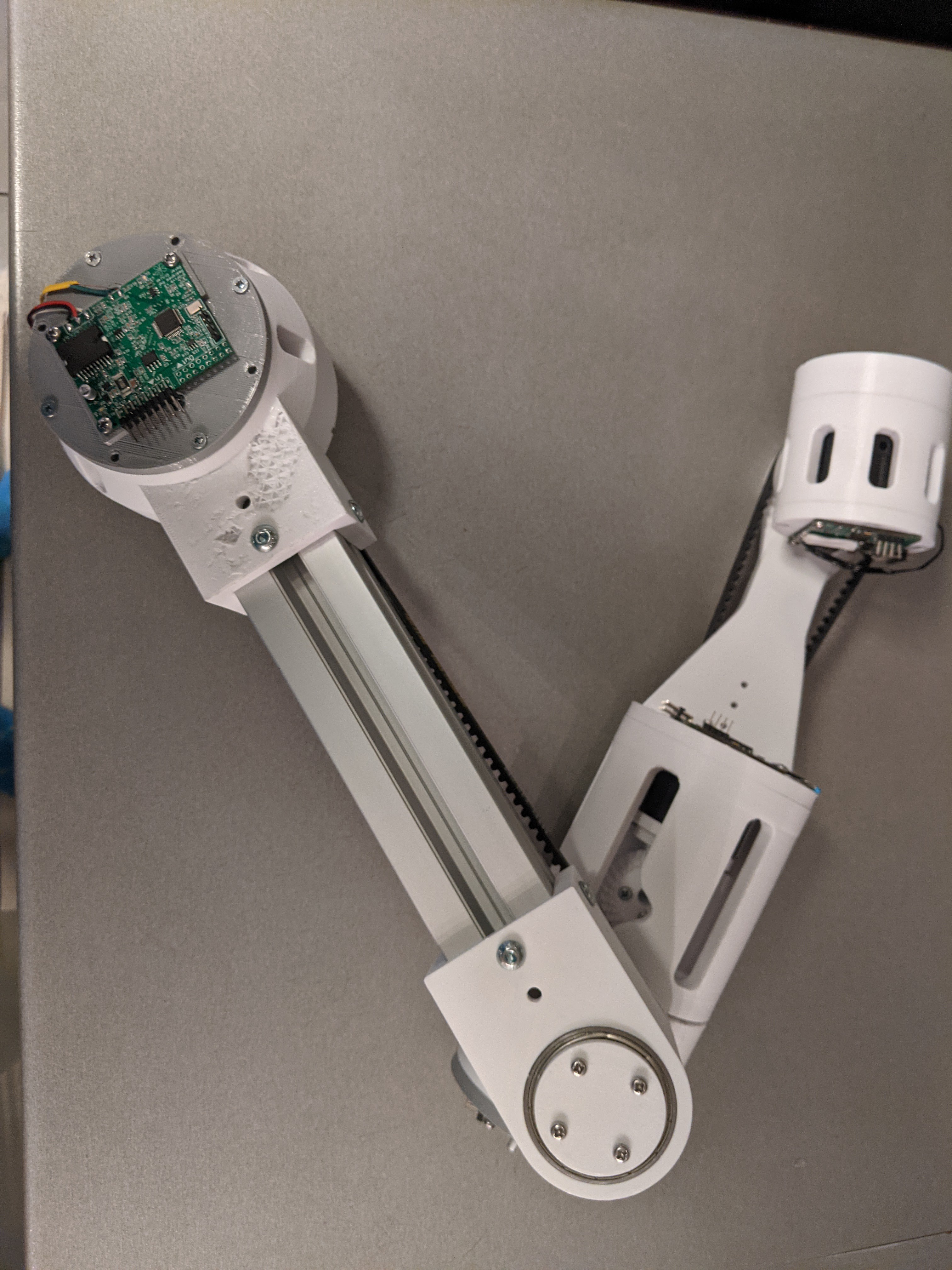
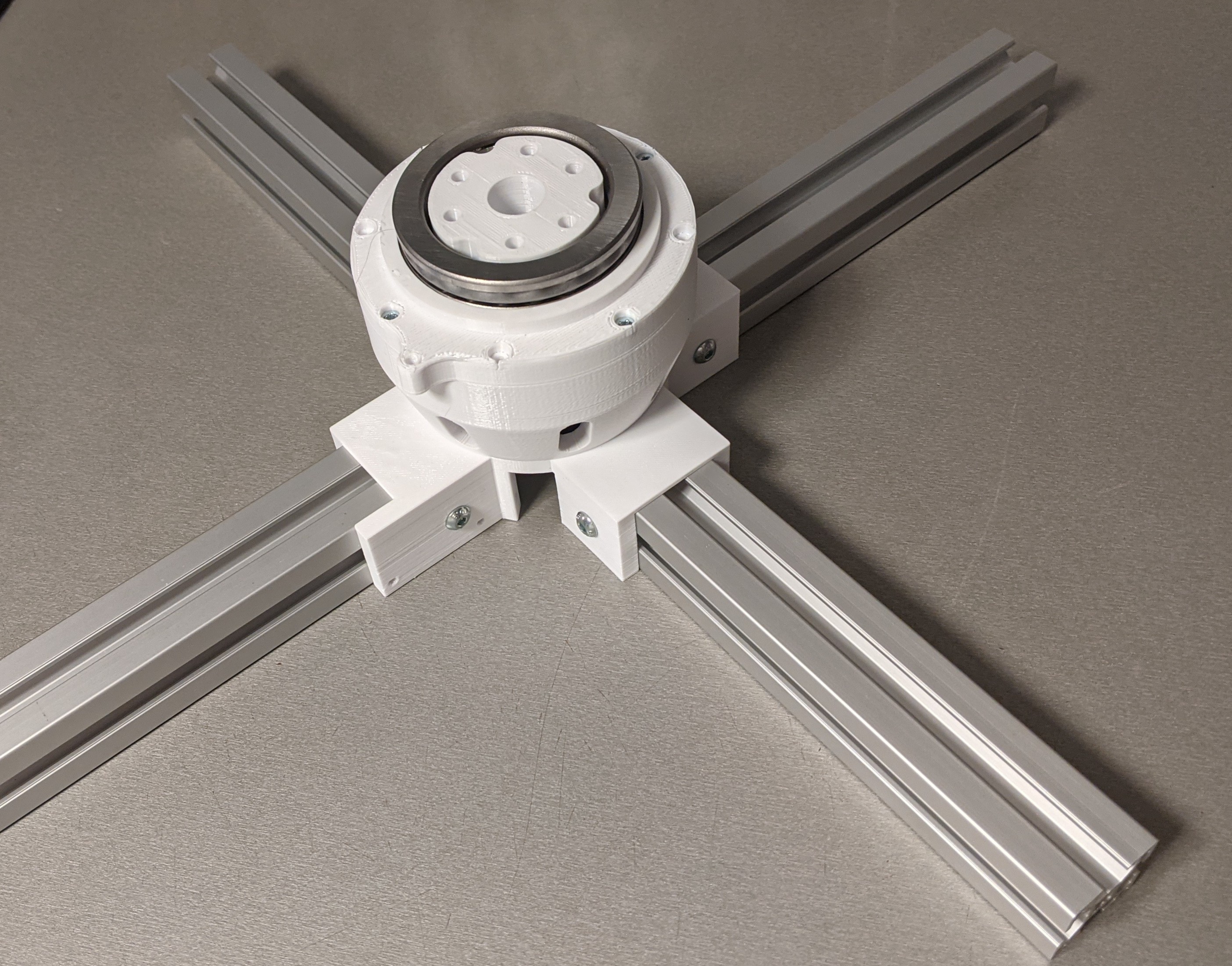
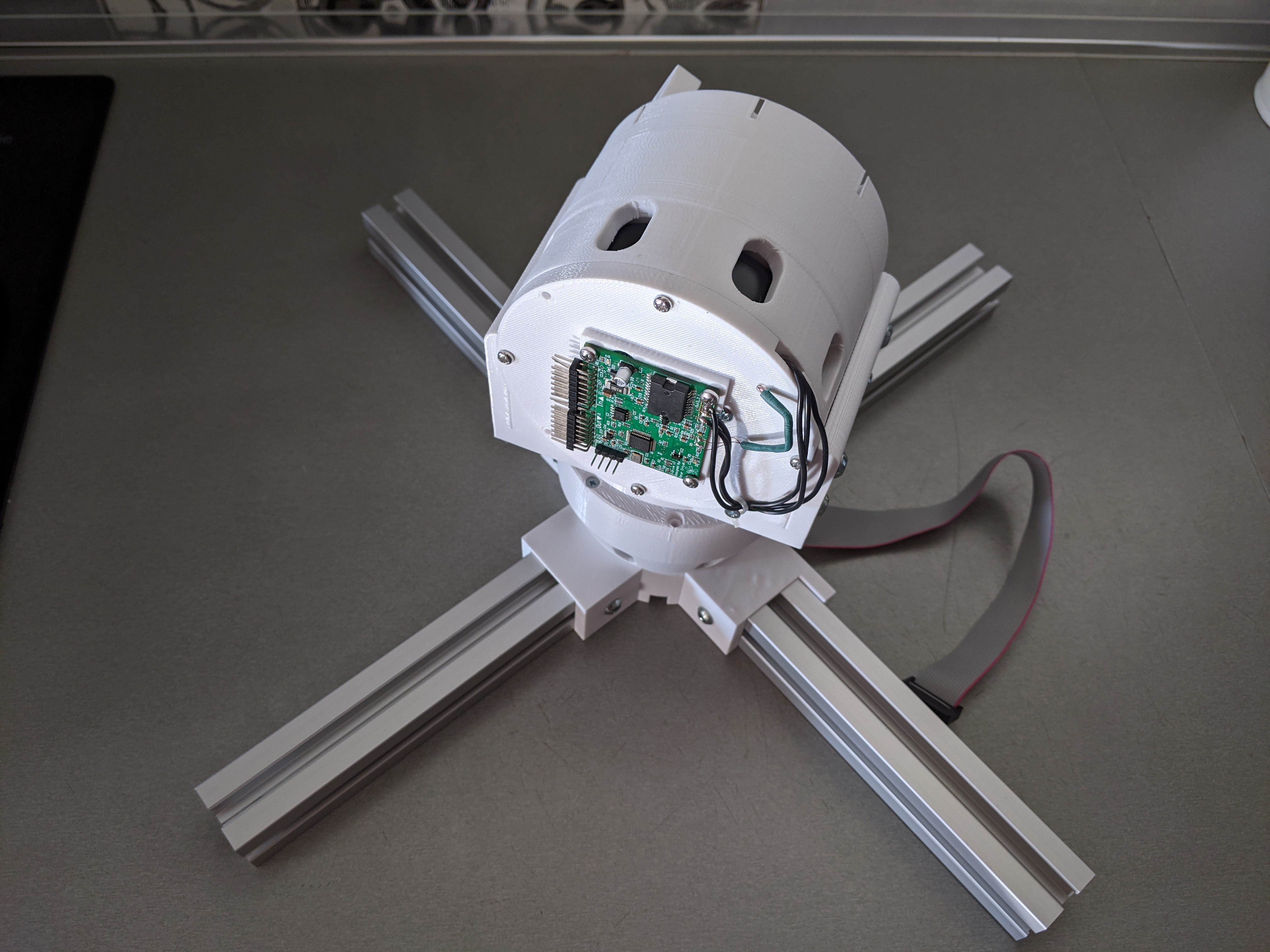
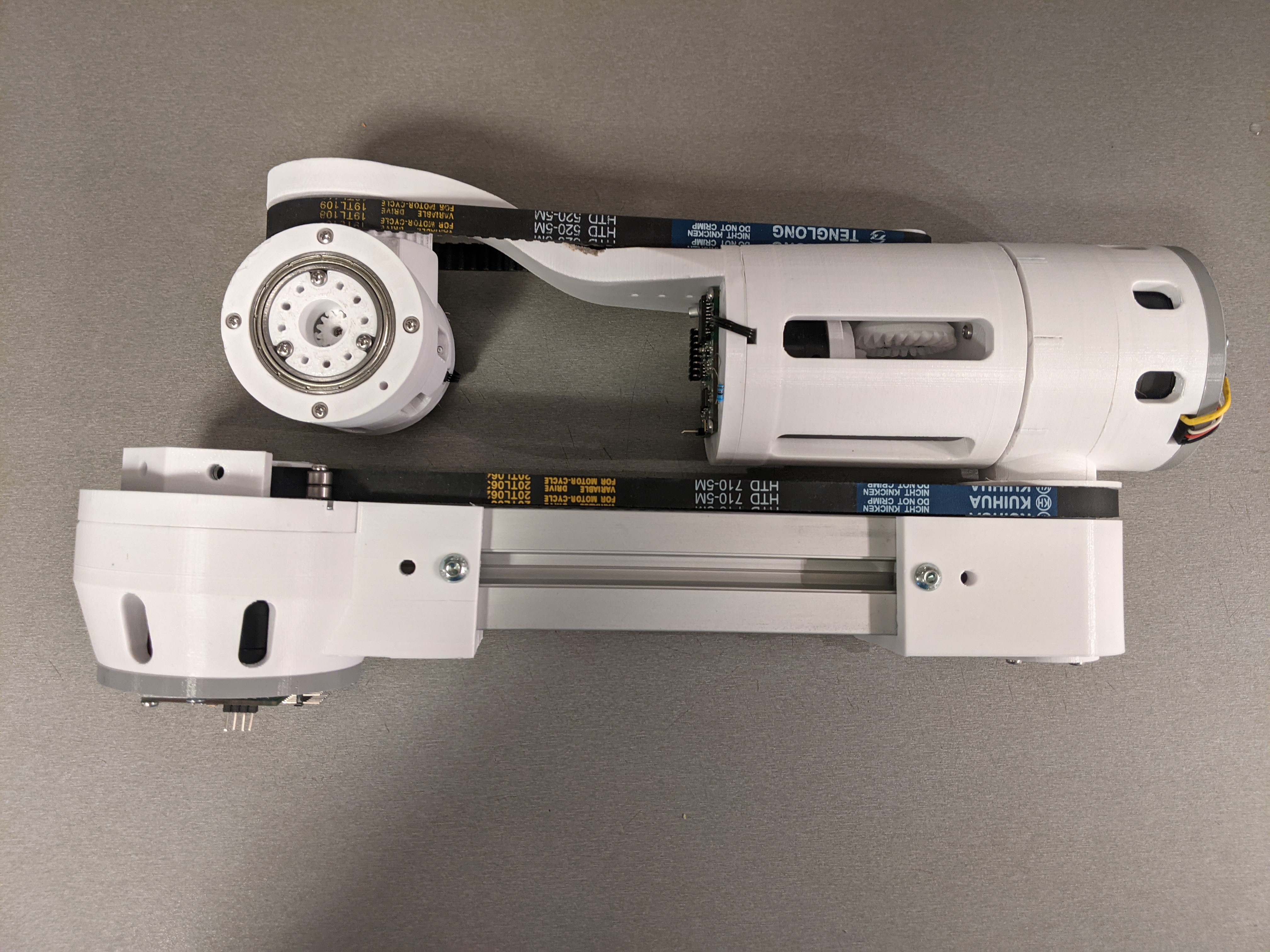
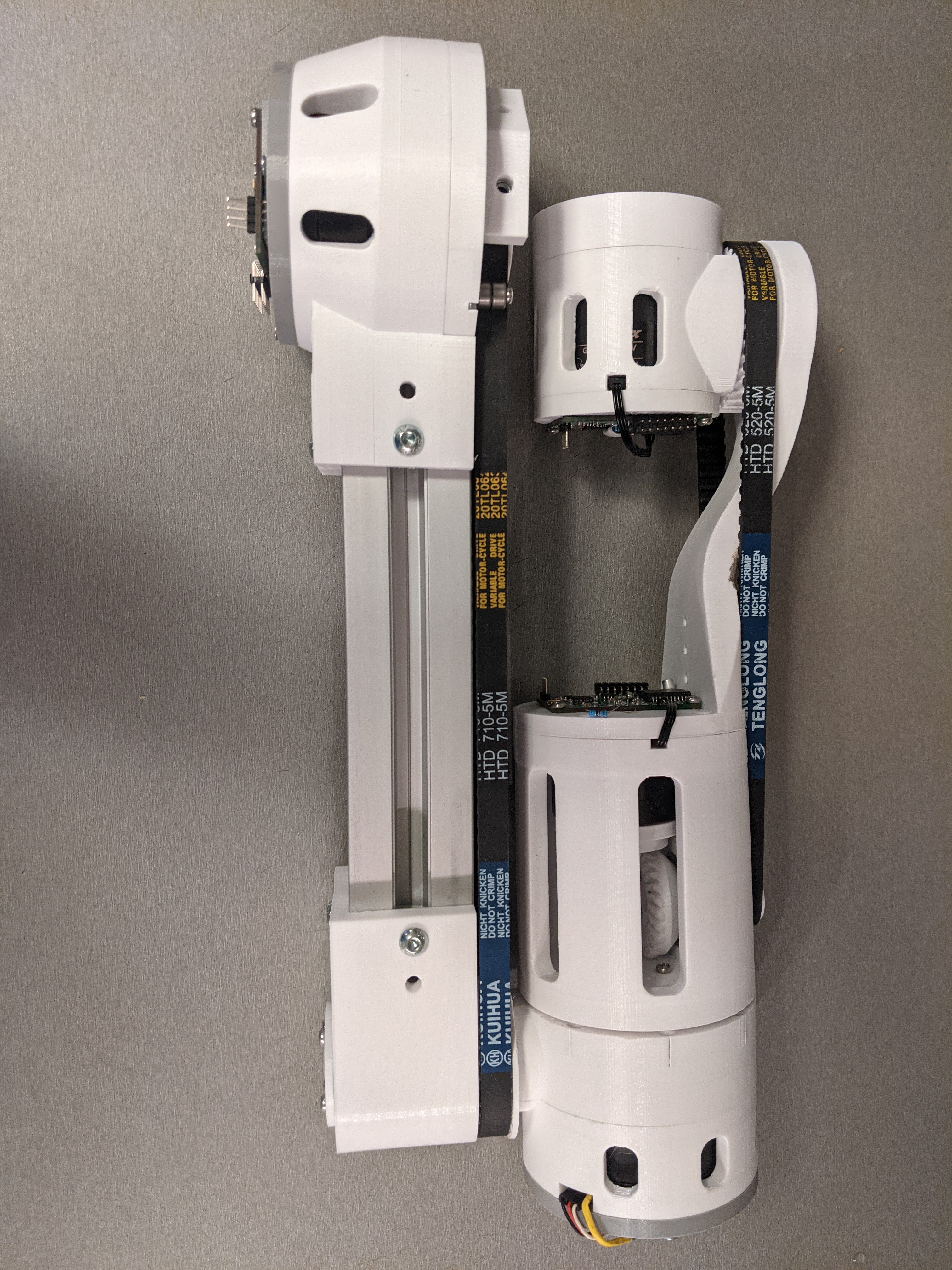
Image gallery of parts
08/30/2021 at 17:15 • 0 comments![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
CM6 - Compliant 3D printed robotic arm
Cheap, Open-source, safe, and compliant 6 - Axis 3d printed robotic arm based on Quasi direct drive BLDC drives.