0%
0%
GPS + IMU Wio Terminal Logger
This gadget will record GPS and IMU data at 50 Hz onto an SD card for further processing on a PC.
 GOAT INDUSTRIES
GOAT INDUSTRIESBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
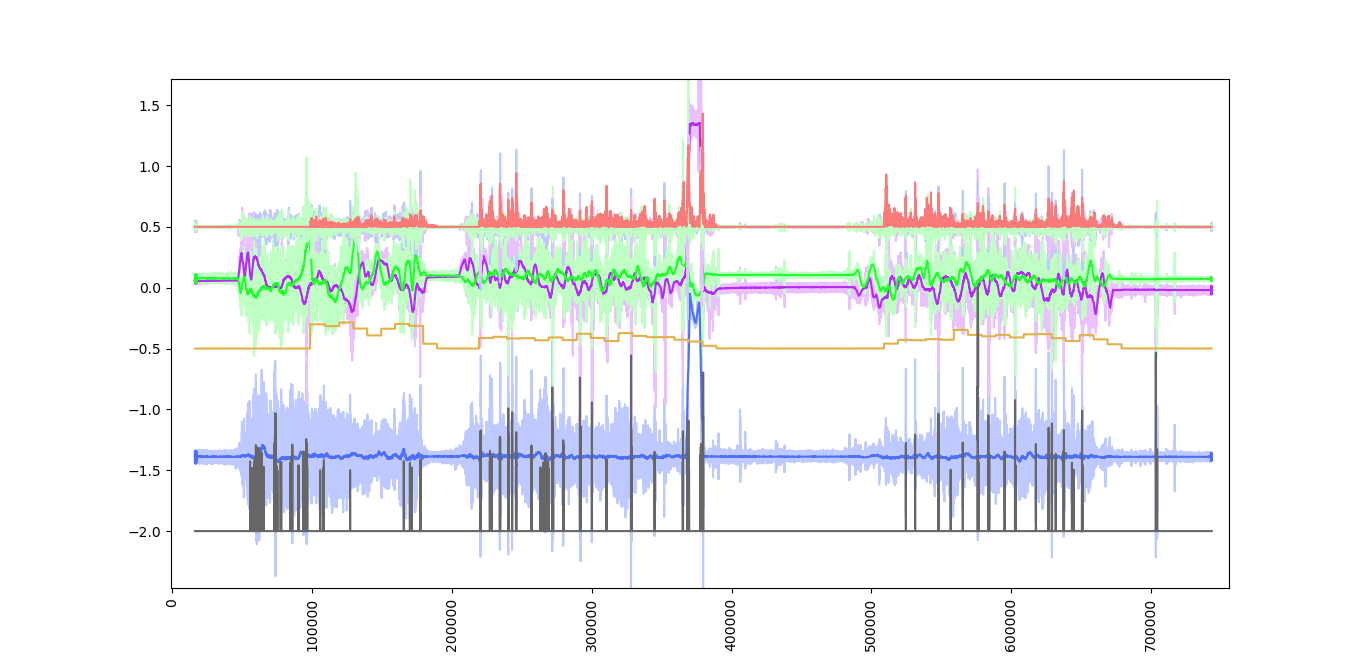
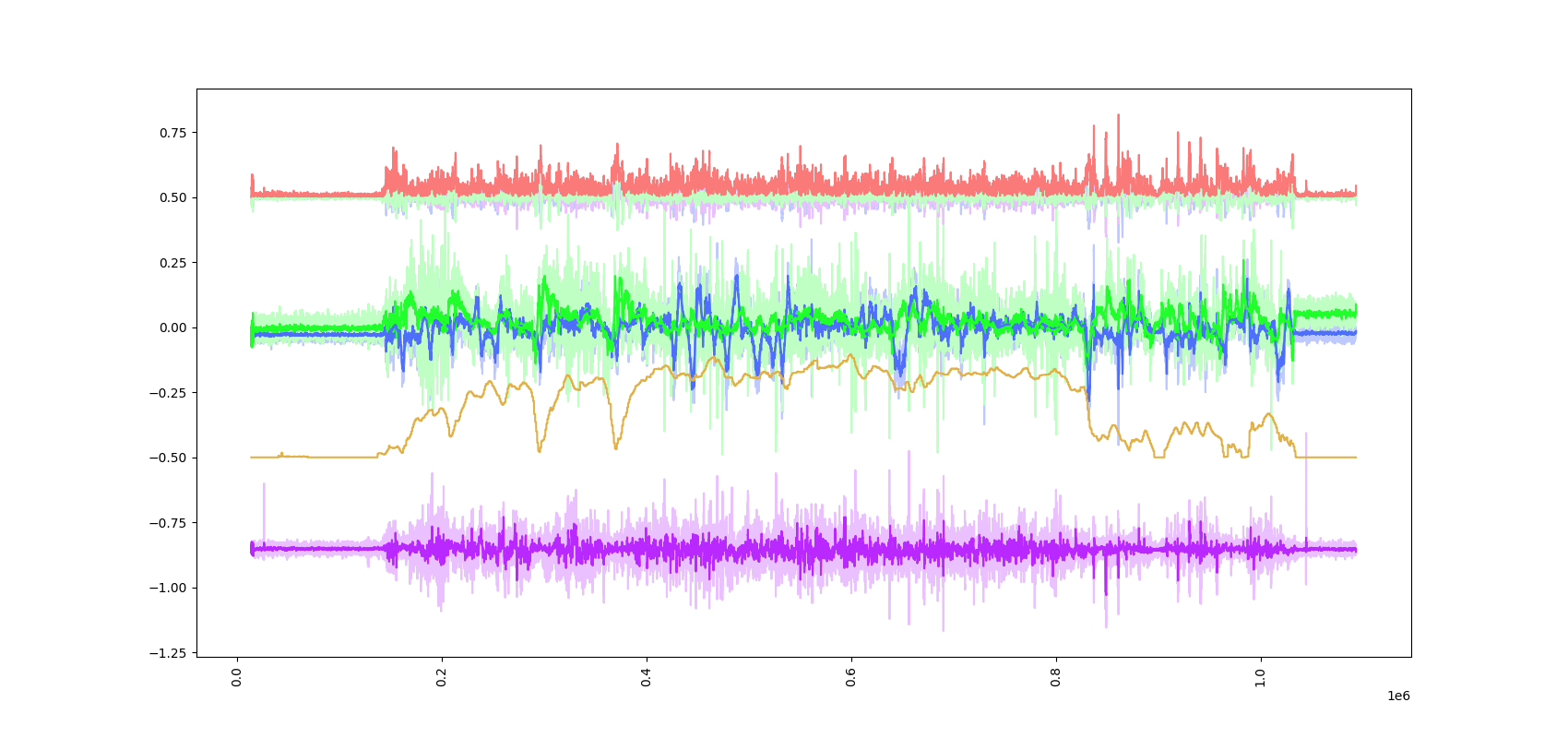
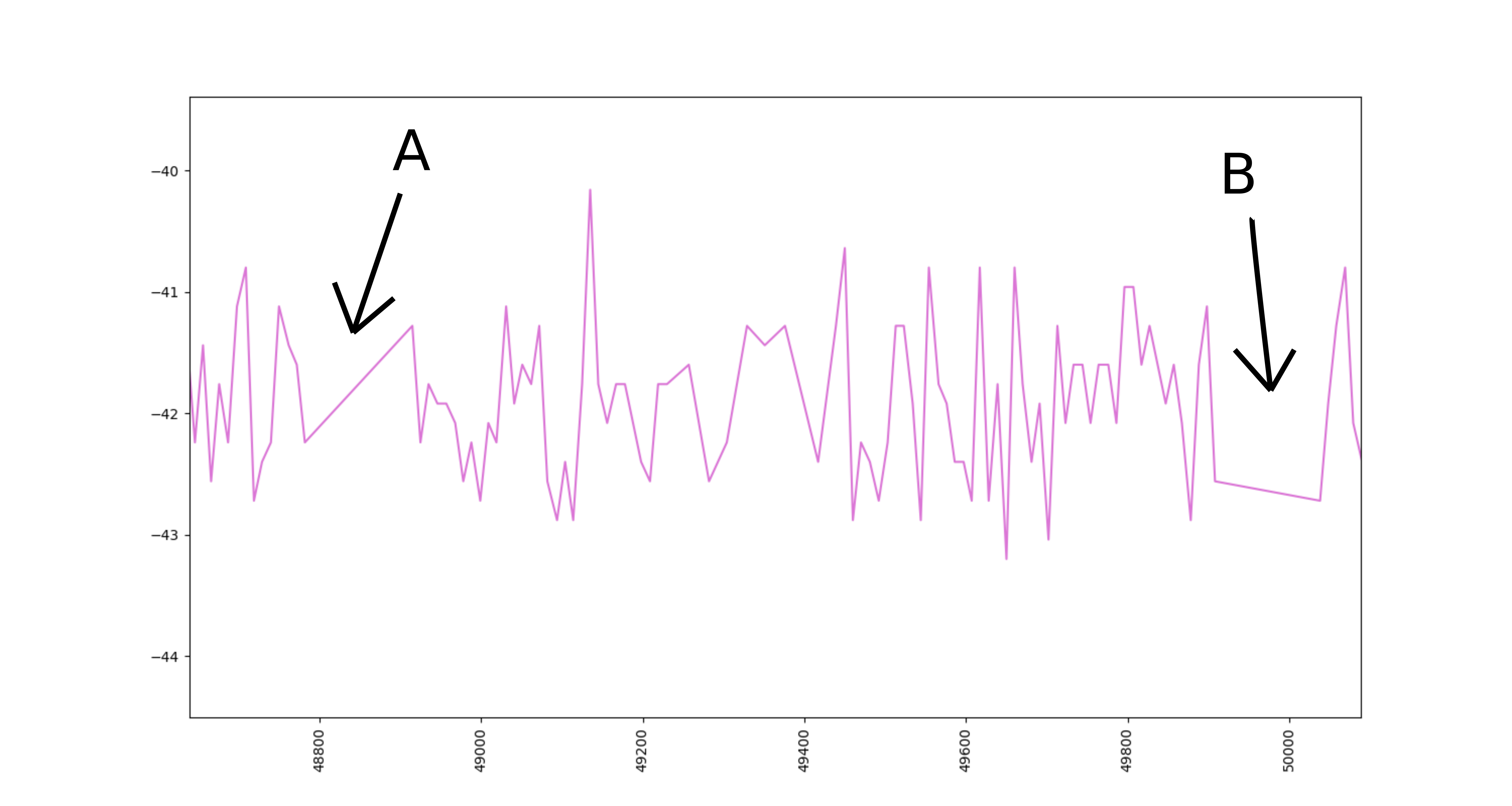
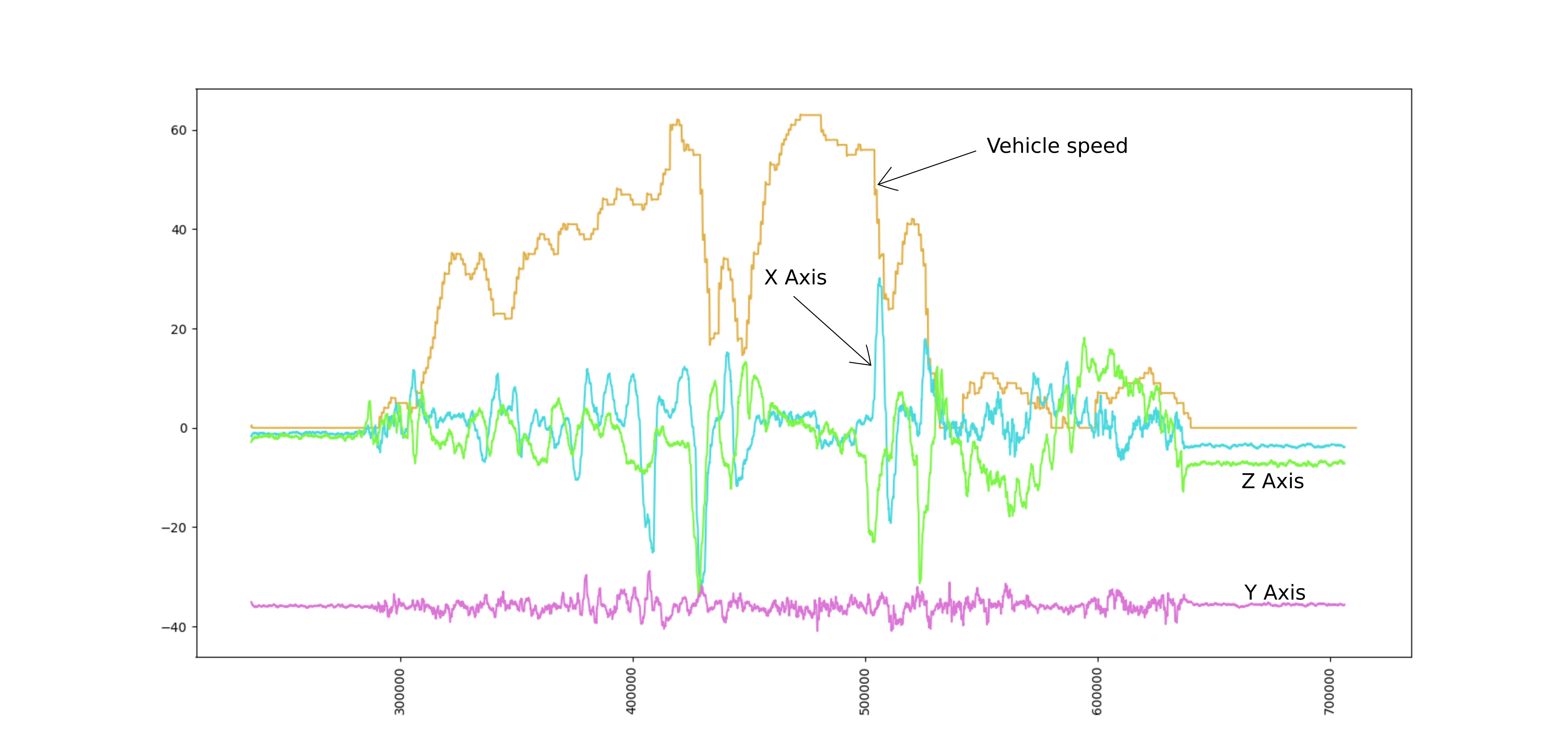 GPS logging was pretty good and after messing about with some basic sample length = 60 filters, I got some coherent results for the IMU. Potholes should have been seen on the Y axis in the last two 'hillocks' of speed, but nothing was seen !! Maybe a better IMU is required with less noise and more G-Force capability?
GPS logging was pretty good and after messing about with some basic sample length = 60 filters, I got some coherent results for the IMU. Potholes should have been seen on the Y axis in the last two 'hillocks' of speed, but nothing was seen !! Maybe a better IMU is required with less noise and more G-Force capability?

 Pradeeplogu
Pradeeplogu
 Paul Scott
Paul Scott
 Ken Yap
Ken Yap
 C A Fillekes
C A Fillekes