GOAT INDUSTRIES
GOAT INDUSTRIES-
More pretty graphs
11/30/2021 at 10:14 • 0 comments![]()
-
Filters in Place
11/24/2021 at 20:06 • 0 comments![]()
-
Something Seriously Wrong !!
11/23/2021 at 13:47 • 0 commentsThe device was gently shaken up and down and, in theory, there should be a sine shaped plot on the Y axis, but it's obviously corrupted:
![]()
-
Pothole Detection
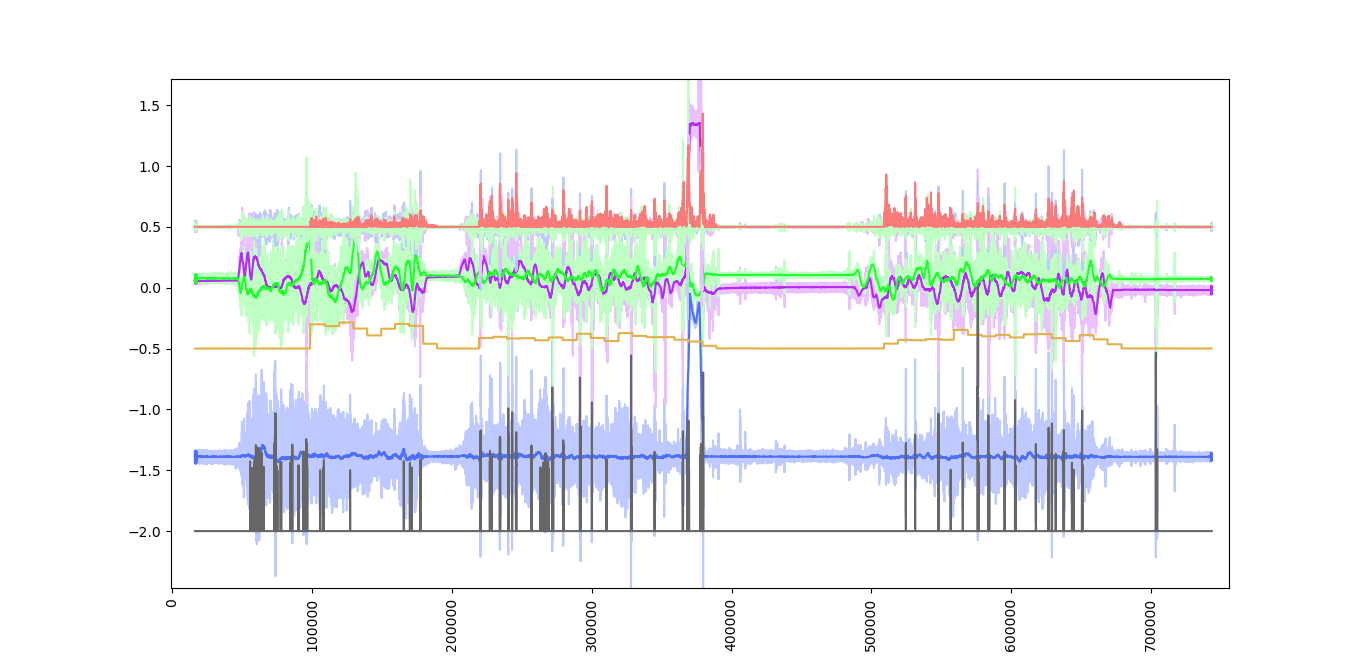
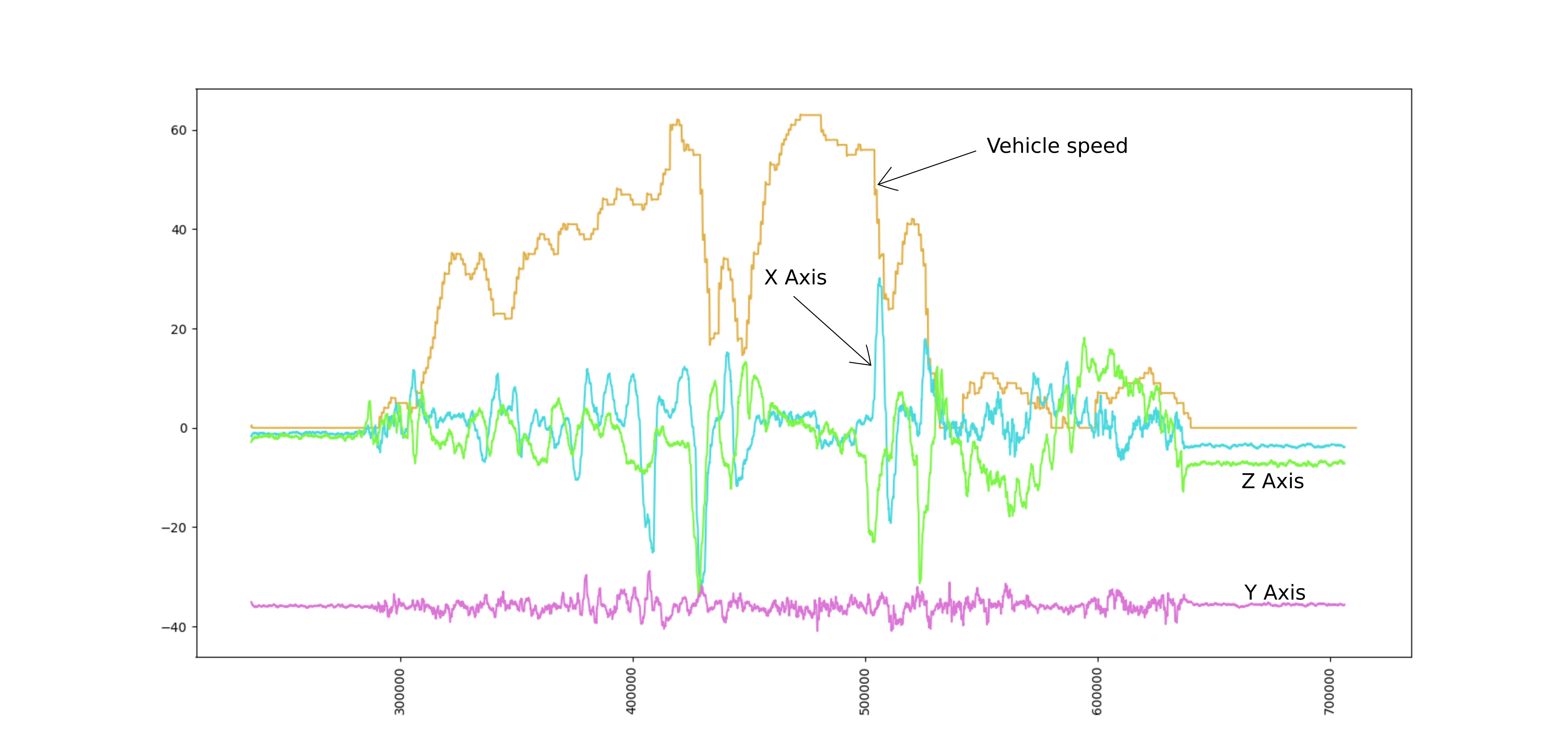
11/22/2021 at 10:21 • 0 commentsThe logger was put on the dashboard of my van in an attempt to detect pot holes.
![]() GPS logging was pretty good and after messing about with some basic sample length = 60 filters, I got some coherent results for the IMU. Potholes should have been seen on the Y axis in the last two 'hillocks' of speed, but nothing was seen !! Maybe a better IMU is required with less noise and more G-Force capability?
GPS logging was pretty good and after messing about with some basic sample length = 60 filters, I got some coherent results for the IMU. Potholes should have been seen on the Y axis in the last two 'hillocks' of speed, but nothing was seen !! Maybe a better IMU is required with less noise and more G-Force capability? -
SD card upgrade made no difference!
11/17/2021 at 16:44 • 0 comments![]()
-
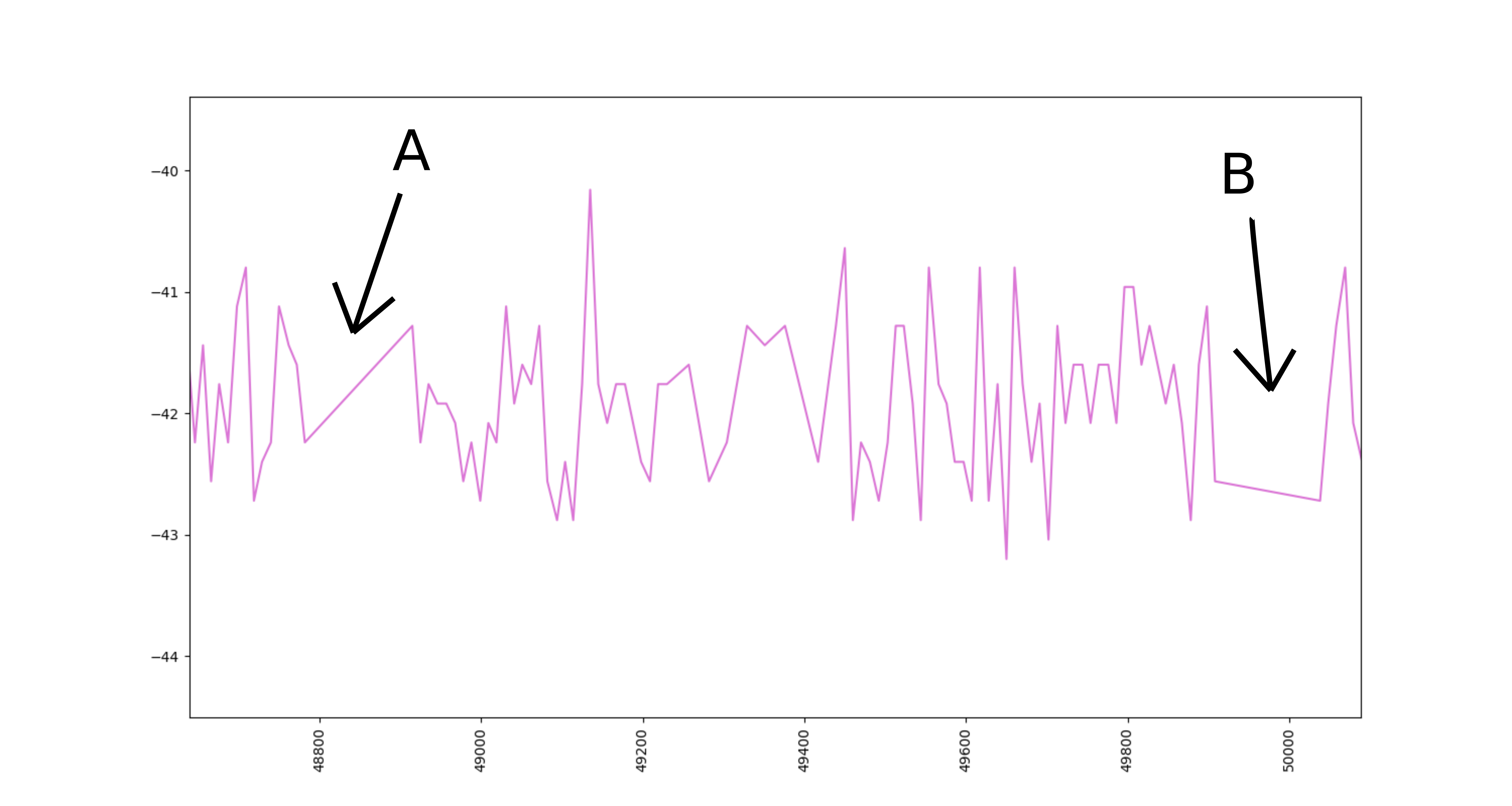
Checking data for integrity
11/16/2021 at 18:23 • 0 commentsThe image below is a screenshot of a portion of the IMU data captured at 100 Hz. A and B show areas where there seems to be data loss when the system writes to the SD card. The bottom axis is milli-seconds and data seems to be being written once every second or so, with about a 200 milli-second loss each time. There will be some kind of compromise between data output frequency and the amount of data outputted and some optimisation will probably be made by 1. Upgrading the SD card and 2. Doing some onboard averaging to reduce the amount of data getting written to SD. ![]()
-
Add flash stored integer for making filename change per session and various timers to check for data blocking
11/15/2021 at 15:50 • 0 comments#include <SoftwareSerial.h> #include <TinyGPS.h> #include <TFT_eSPI.h> // Graphics and font library for ILI9341 driver #include"LIS3DHTR.h" #include "RTC_SAMD51.h" #include "DateTime.h" #include <SPI.h> #include <SD.h> #include <FlashStorage_SAMD.h> #define FLASH_DEBUG 0 #define TFT_GREY 0x5AEB #define YELLOW 0xFFE0 #define RED 0xF800 FlashStorage(my_flash_store, int); TFT_eSPI tft = TFT_eSPI(); // Invoke library LIS3DHTR<TwoWire> lis; RTC_SAMD51 rtc; int captureTime; int SDWriteTime; unsigned long avSDWriteTime =0; int SDwriteCycleTime; unsigned long start1; unsigned long finish1; unsigned long start2; unsigned long finish2; unsigned long currentMicros1; unsigned long previousMicros1 =0; unsigned long count2 = 0; // string to buffer output String buffer; String filename; unsigned long lastMillis = 0; int stateOne = 0; float flat = 0.00000000; float flon = 0.00000000; float GPSspeed = 0.0; int GPSsatelites = 0; int GPSprecision = 0; int flashNumber; uint16_t address = 0; // File object to represent file File txtFile; /* This sample code demonstrates the normal use of a TinyGPS object. It requires the use of SoftwareSerial, and assumes that you have a 9600-baud serial GPS device hooked up on pins D0(rx) and D1(tx) - the SIM28 Seed studio grove GPS module. */ TinyGPS gps; SoftwareSerial ss(0, 1); void setup() { // Read the content of emulated-EEPROM EEPROM.get(address, flashNumber); // Save into emulated-EEPROM the number increased by 1 for the next run of the sketch EEPROM.put(address, (int) (flashNumber + 1)); if (!EEPROM.getCommitASAP()) { // Serial.println("CommitASAP not set. Need commit()"); EEPROM.commit(); } tft.init(); tft.setRotation(2); tft.fillScreen(TFT_BLACK); tft.setCursor(0, 0, 2); tft.setTextColor(YELLOW, TFT_BLACK); tft.setTextSize(2); tft.println(" GPS + G-Force "); tft.println(" Data Logger "); tft.println(" V.1.01 "); tft.setTextColor(TFT_WHITE, TFT_BLACK); tft.setTextSize(2); Serial.begin(115200); // while(!Serial){1;}; // tft.println("Serial started ..."); delay(5000); ss.begin(9600); lis.begin(Wire1); rtc.begin(); DateTime now = DateTime(F(__DATE__), F(__TIME__)); Serial.println("adjust time!"); rtc.adjust(now); // yyyy/MM/dd HH:mm:ss // SD file name is restricted to 8 characters !! // filename += now.year(); filename += ""; // filename += now.month(); filename += ""; filename += now.day(); filename += ""; filename += now.hour(); filename += "_"; // Use a flash stored variable to ensure unique filename: filename += String(flashNumber); filename += ".txt"; if (!lis) { Serial.println("ERROR"); while(1); } lis.setOutputDataRate(LIS3DHTR_DATARATE_50HZ); //Data output rate lis.setFullScaleRange(LIS3DHTR_RANGE_2G); //Scale range set to 2g // reserve 1kB for String used as a buffer buffer.reserve(2048); // set LED pin to output, used to blink when writing pinMode(LED_BUILTIN, OUTPUT); // init the SD card if (!SD.begin()) { tft.setTextColor(RED, TFT_BLACK); tft.setTextSize(2); tft.println(" No SD card? "); Serial.println("Card failed, or not present"); // don't do anything more: while (1); } // If you want to start from an empty file, // uncomment the next line: // SD.remove(filename); // try to open the file for writing txtFile = SD.open(filename, FILE_WRITE); if (!txtFile) { Serial.print("error opening "); Serial.println(filename); while (1); } txtFile.write("Millis,Timestamp,Accel_X,Accel_Y,Accel_Z,Satelites,Speed(km/h),Latitude,Longitude,GPSprecision \r\n"); Serial.print("Simple TinyGPS library v. "); Serial.println(TinyGPS::library_version()); Serial.println("by Mikal Hart"); Serial.println(); } void loop() { bool newData = false; unsigned long chars; unsigned short sentences, failed; // For one second we parse GPS data and report some key values for (unsigned long currentMillis = millis(); millis() - currentMillis < 1000;) { while (ss.available()) { start1 = micros(); char c = ss.read(); Serial.write(c); // uncomment this line if you want to see the GPS data flowing if (gps.encode(c)) // Did a new valid sentence come in? newData = true; finish1 = micros(); } captureTime = finish1 - start1; float x_values, y_values, z_values; x_values = lis.getAccelerationX(); y_values = lis.getAccelerationY(); z_values = lis.getAccelerationZ(); ////////////////////////////////////////////////////////////////// // check if it's been over 20 ms since the last line added unsigned long currentMillisTwo = millis(); if ((currentMillisTwo - lastMillis) >= 20) { DateTime now = rtc.now(); // Serial.println("Write to the buffer !!"); // add a new line to the buffer buffer += currentMillisTwo; buffer += ","; // yyyy/MM/dd HH:mm:ss buffer += now.year(); buffer += "-"; buffer += now.month(); buffer += "-"; buffer += now.day(); buffer += " "; buffer += now.hour(); buffer += ":"; buffer += now.minute(); buffer += ":"; buffer += now.second(); buffer += ","; buffer += String(x_values,3); buffer += ","; buffer += String(y_values,3); buffer += ","; buffer += String(z_values,3); buffer += ","; GPSsatelites = gps.satellites(); if (GPSsatelites == 255) { GPSsatelites = 0; } buffer += String(GPSsatelites); buffer += ","; GPSspeed = gps.f_speed_kmph(); if (GPSspeed < 0) { GPSspeed = 0.0; } buffer += String(GPSspeed,3); buffer += ","; buffer += String(flat,8); buffer += ","; buffer += String(flon,8); buffer += ","; GPSprecision = gps.hdop(); if (GPSprecision < 0) { GPSprecision = 0; } buffer += String(GPSprecision); buffer += "\r\n"; // Serial.println(flat); // Serial.println(buffer); lastMillis = currentMillisTwo; } // check if the SD card is available to write data without blocking // and if the buffered data is enough for the full chunk size unsigned int chunkSize = txtFile.availableForWrite(); // Serial.print("chunkSize: "); Serial.print(chunkSize); // Serial.print(" buffer.length(): "); Serial.println(buffer.length()); if (chunkSize && buffer.length() >= chunkSize) { currentMicros1 = micros(); SDwriteCycleTime = currentMicros1 - previousMicros1; previousMicros1 = currentMicros1; if (stateOne == 0) { stateOne = 1; digitalWrite(LED_BUILTIN, HIGH); } else { stateOne = 0; digitalWrite(LED_BUILTIN, LOW); } // Serial.println("Write the buffer to the SD card !!"); start2 = micros(); txtFile.write(buffer.c_str(), chunkSize); finish2 = micros(); SDWriteTime = finish2 - start2; // Initialise the averaging calc: if (avSDWriteTime == 0) { avSDWriteTime = SDWriteTime; } // Apply arbitary averaging weights: avSDWriteTime = (avSDWriteTime*49 + SDWriteTime)/50; // remove written data from buffer buffer.remove(0, chunkSize); } /////////////////////////////////////////////////////////// } if (newData) { unsigned long age; gps.f_get_position(&flat, &flon, &age); Serial.print("LAT="); Serial.print(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6); Serial.print(" LON="); Serial.print(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6); Serial.print(" SAT="); Serial.print(gps.satellites() == TinyGPS::GPS_INVALID_SATELLITES ? 0 : gps.satellites()); Serial.print(" PREC="); Serial.print(gps.hdop() == TinyGPS::GPS_INVALID_HDOP ? 0 : gps.hdop()); tft.fillScreen(TFT_BLACK); tft.setCursor(0, 0, 2); tft.print("LAT= ");tft.println(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6); tft.print("LON= ");tft.println(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6); tft.print("SATS= ");tft.println(gps.satellites() == TinyGPS::GPS_INVALID_SATELLITES ? 0 : gps.satellites()); tft.print("PREC= ");tft.println(gps.hdop() == TinyGPS::GPS_INVALID_HDOP ? 0 : gps.hdop()); // tft.print("SPEED= ");tft.println(gps.f_speed_kmph(), TinyGPS::GPS_INVALID_F_SPEED, 6, 2); tft.print("SPEED= ");tft.println(gps.f_speed_kmph() == TinyGPS::GPS_INVALID_F_SPEED ? 0.0 : gps.f_speed_kmph()); tft.print("CAPT= ");tft.print(captureTime);tft.println(" uS"); tft.print("SDWr= ");tft.print(SDWriteTime);tft.println(" uS"); tft.print("aSDW= ");tft.print(avSDWriteTime);tft.println(" uS"); tft.print("SDWc= ");tft.print(SDwriteCycleTime);tft.println(" uS"); tft.print("FName= ");tft.print(filename); } else { tft.fillScreen(TFT_BLACK); tft.setCursor(0, 0, 2); tft.println("No GPS fix"); tft.print("CAPT= ");tft.println(captureTime); } gps.stats(&chars, &sentences, &failed); Serial.print(" CHARS="); Serial.print(chars); Serial.print(" SENTENCES="); Serial.print(sentences); Serial.print(" CSUM ERR="); Serial.println(failed); if (chars == 0) Serial.println("** No characters received from GPS: check wiring **"); } -
Inital Code Using the Arduino IDE
11/13/2021 at 22:06 • 0 comments#include <SoftwareSerial.h> #include <TinyGPS.h> #include <TFT_eSPI.h> // Graphics and font library for ILI9341 driver #include"LIS3DHTR.h" #include "RTC_SAMD51.h" #include "DateTime.h" #include <SPI.h> #include <SD.h> #define TFT_GREY 0x5AEB #define YELLOW 0xFFE0 #define RED 0xF800 TFT_eSPI tft = TFT_eSPI(); // Invoke library LIS3DHTR<TwoWire> lis; RTC_SAMD51 rtc; int captureTime; unsigned long start; unsigned long finish; // string to buffer output String buffer; String filename; unsigned long lastMillis = 0; int stateOne = 0; float flat = 0.00000000; float flon = 0.00000000; float GPSspeed = 0.0; int GPSsatelites = 0; int GPSprecision = 0; // File object to represent file File txtFile; /* This sample code demonstrates the normal use of a TinyGPS object. It requires the use of SoftwareSerial, and assumes that you have a 9600-baud serial GPS device hooked up on pins D0(rx) and D1(tx). */ TinyGPS gps; SoftwareSerial ss(0, 1); void setup() { tft.init(); tft.setRotation(2); tft.fillScreen(TFT_BLACK); tft.setCursor(0, 0, 2); tft.setTextColor(YELLOW, TFT_BLACK); tft.setTextSize(2); tft.println(" GPS + G-Force "); tft.println(" Data Logger "); tft.println(" V.1.01 "); tft.setTextColor(TFT_WHITE, TFT_BLACK); tft.setTextSize(2); Serial.begin(115200); // while(!Serial){1;}; // tft.println("Serial started ..."); delay(5000); ss.begin(9600); lis.begin(Wire1); rtc.begin(); DateTime now = DateTime(F(__DATE__), F(__TIME__)); Serial.println("adjust time!"); rtc.adjust(now); // yyyy/MM/dd HH:mm:ss // SD file name is restricted to 8 characters !! // filename += now.year(); filename += ""; // filename += now.month(); filename += ""; filename += now.day(); filename += ""; filename += now.hour(); filename += ""; filename += now.minute(); filename += ""; filename += now.second(); filename += ".txt"; if (!lis) { Serial.println("ERROR"); while(1); } lis.setOutputDataRate(LIS3DHTR_DATARATE_50HZ); //Data output rate lis.setFullScaleRange(LIS3DHTR_RANGE_2G); //Scale range set to 2g // reserve 1kB for String used as a buffer buffer.reserve(2048); // set LED pin to output, used to blink when writing pinMode(LED_BUILTIN, OUTPUT); // init the SD card if (!SD.begin()) { tft.setTextColor(RED, TFT_BLACK); tft.setTextSize(2); tft.println(" No SD card? "); Serial.println("Card failed, or not present"); // don't do anything more: while (1); } // If you want to start from an empty file, // uncomment the next line: // SD.remove(filename); // try to open the file for writing txtFile = SD.open(filename, FILE_WRITE); if (!txtFile) { Serial.print("error opening "); Serial.println(filename); while (1); } txtFile.write("Millis,Timestamp,Accel_X,Accel_Y,Accel_Z,Satelites,Speed(km/h),Latitude,Longitude,GPSprecision \r\n"); Serial.print("Simple TinyGPS library v. "); Serial.println(TinyGPS::library_version()); Serial.println("by Mikal Hart"); Serial.println(); } void loop() { bool newData = false; unsigned long chars; unsigned short sentences, failed; // For one second we parse GPS data and report some key values for (unsigned long currentMillis = millis(); millis() - currentMillis < 1000;) { while (ss.available()) { start = micros(); char c = ss.read(); Serial.write(c); // uncomment this line if you want to see the GPS data flowing if (gps.encode(c)) // Did a new valid sentence come in? newData = true; finish = micros(); } captureTime = finish - start; float x_values, y_values, z_values; x_values = lis.getAccelerationX(); y_values = lis.getAccelerationY(); z_values = lis.getAccelerationZ(); ////////////////////////////////////////////////////////////////// // check if it's been over 20 ms since the last line added unsigned long currentMillisTwo = millis(); if ((currentMillisTwo - lastMillis) >= 20) { DateTime now = rtc.now(); // Serial.println("Write to the buffer !!"); // add a new line to the buffer buffer += currentMillisTwo; buffer += ","; // yyyy/MM/dd HH:mm:ss buffer += now.year(); buffer += "-"; buffer += now.month(); buffer += "-"; buffer += now.day(); buffer += " "; buffer += now.hour(); buffer += ":"; buffer += now.minute(); buffer += ":"; buffer += now.second(); buffer += ","; buffer += String(x_values,3); buffer += ","; buffer += String(y_values,3); buffer += ","; buffer += String(z_values,3); buffer += ","; GPSsatelites = gps.satellites(); if (GPSsatelites == 255) { GPSsatelites = 0; } buffer += String(GPSsatelites); buffer += ","; GPSspeed = gps.f_speed_kmph(); if (GPSspeed < 0) { GPSspeed = 0.0; } buffer += String(GPSspeed,3); buffer += ","; buffer += String(flat,8); buffer += ","; buffer += String(flon,8); buffer += ","; GPSprecision = gps.hdop(); if (GPSprecision < 0) { GPSprecision = 0; } buffer += String(GPSprecision); buffer += "\r\n"; // Serial.println(flat); // Serial.println(buffer); lastMillis = currentMillisTwo; } // check if the SD card is available to write data without blocking // and if the buffered data is enough for the full chunk size unsigned int chunkSize = txtFile.availableForWrite(); // Serial.print("chunkSize: "); Serial.print(chunkSize); // Serial.print(" buffer.length(): "); Serial.println(buffer.length()); if (chunkSize && buffer.length() >= chunkSize) { if (stateOne == 0) { stateOne = 1; digitalWrite(LED_BUILTIN, HIGH); } else { stateOne = 0; digitalWrite(LED_BUILTIN, LOW); } // Serial.println("Write the buffer to the SD card !!"); txtFile.write(buffer.c_str(), chunkSize); // remove written data from buffer buffer.remove(0, chunkSize); } /////////////////////////////////////////////////////////// } if (newData) { unsigned long age; gps.f_get_position(&flat, &flon, &age); Serial.print("LAT="); Serial.print(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6); Serial.print(" LON="); Serial.print(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6); Serial.print(" SAT="); Serial.print(gps.satellites() == TinyGPS::GPS_INVALID_SATELLITES ? 0 : gps.satellites()); Serial.print(" PREC="); Serial.print(gps.hdop() == TinyGPS::GPS_INVALID_HDOP ? 0 : gps.hdop()); tft.fillScreen(TFT_BLACK); tft.setCursor(0, 0, 2); tft.print("LAT= ");tft.println(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6); tft.print("LON= ");tft.println(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6); tft.print("SATS= ");tft.println(gps.satellites() == TinyGPS::GPS_INVALID_SATELLITES ? 0 : gps.satellites()); tft.print("PREC= ");tft.println(gps.hdop() == TinyGPS::GPS_INVALID_HDOP ? 0 : gps.hdop()); // tft.print("SPEED= ");tft.println(gps.f_speed_kmph(), TinyGPS::GPS_INVALID_F_SPEED, 6, 2); tft.print("SPEED= ");tft.println(gps.f_speed_kmph() == TinyGPS::GPS_INVALID_F_SPEED ? 0.0 : gps.f_speed_kmph()); tft.print("CAPT= ");tft.print(captureTime);tft.println(" usecs"); } else { tft.fillScreen(TFT_BLACK); tft.setCursor(0, 0, 2); tft.println("No GPS fix"); tft.print("CAPT= ");tft.println(captureTime); } gps.stats(&chars, &sentences, &failed); Serial.print(" CHARS="); Serial.print(chars); Serial.print(" SENTENCES="); Serial.print(sentences); Serial.print(" CSUM ERR="); Serial.println(failed); if (chars == 0) Serial.println("** No characters received from GPS: check wiring **"); }
GPS + IMU Wio Terminal Logger
This gadget will record GPS and IMU data at 50 Hz onto an SD card for further processing on a PC.
 GPS logging was pretty good and after messing about with some basic sample length = 60 filters, I got some coherent results for the IMU. Potholes should have been seen on the Y axis in the last two 'hillocks' of speed, but nothing was seen !! Maybe a better IMU is required with less noise and more G-Force capability?
GPS logging was pretty good and after messing about with some basic sample length = 60 filters, I got some coherent results for the IMU. Potholes should have been seen on the Y axis in the last two 'hillocks' of speed, but nothing was seen !! Maybe a better IMU is required with less noise and more G-Force capability?