Tobias
Tobias-
Update, approaching completion & other projects
08/10/2023 at 05:36 • 0 commentsI'm afraid it's been a while since I've posted any updates to this project. At this point, the project is functionally complete, but I really need to take some time to complete the documentation. This should be happening in the next couple of days, including
- making sure all 3d printable files are up to date in the Github repo
- completing the build instructions and parts list
- adding a bit of information on wiring and the Arduino interface
In the meantime, I also wanted to share a couple of the other related projects I've been working on. While these all fit into the KSP/space sim theme, I've set them up on hackaday as different projects as the parts list and assembly is completely different.
First, I've been working on a more realistic abort handle that uses a similar spring-loaded cam mechanism which feels really nice. You can follow the project here: https://hackaday.io/project/192126-spacecraft-abort-handle
![]()
Second is a set of parts to make a replica spacecraft hatch, starting the the locking latch mechanisms, and eventually the complex hinge mechanism and hatch lever system. You can follow this project here: https://hackaday.io/project/192181-spacecraft-hatch-parts
![]()
-
Still waiting for parts to arrive
02/17/2022 at 13:31 • 0 commentsWhile I'm (still) waiting on parts to arrive so I can complete the controllers, here are a couple of things I've been working on:
![]()
![]()
![]()
![]()
More to come soon...
-
Waiting for parts...
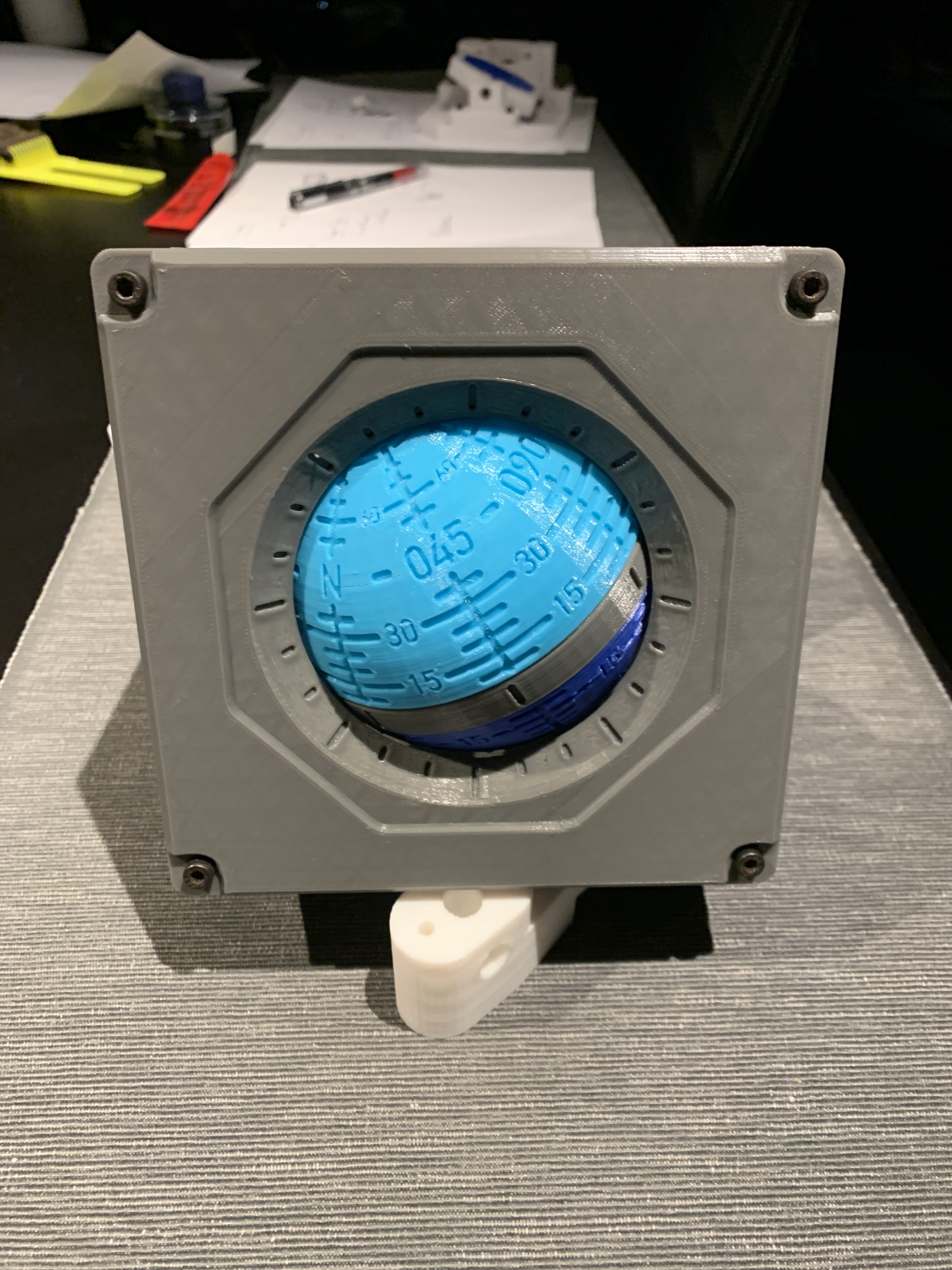
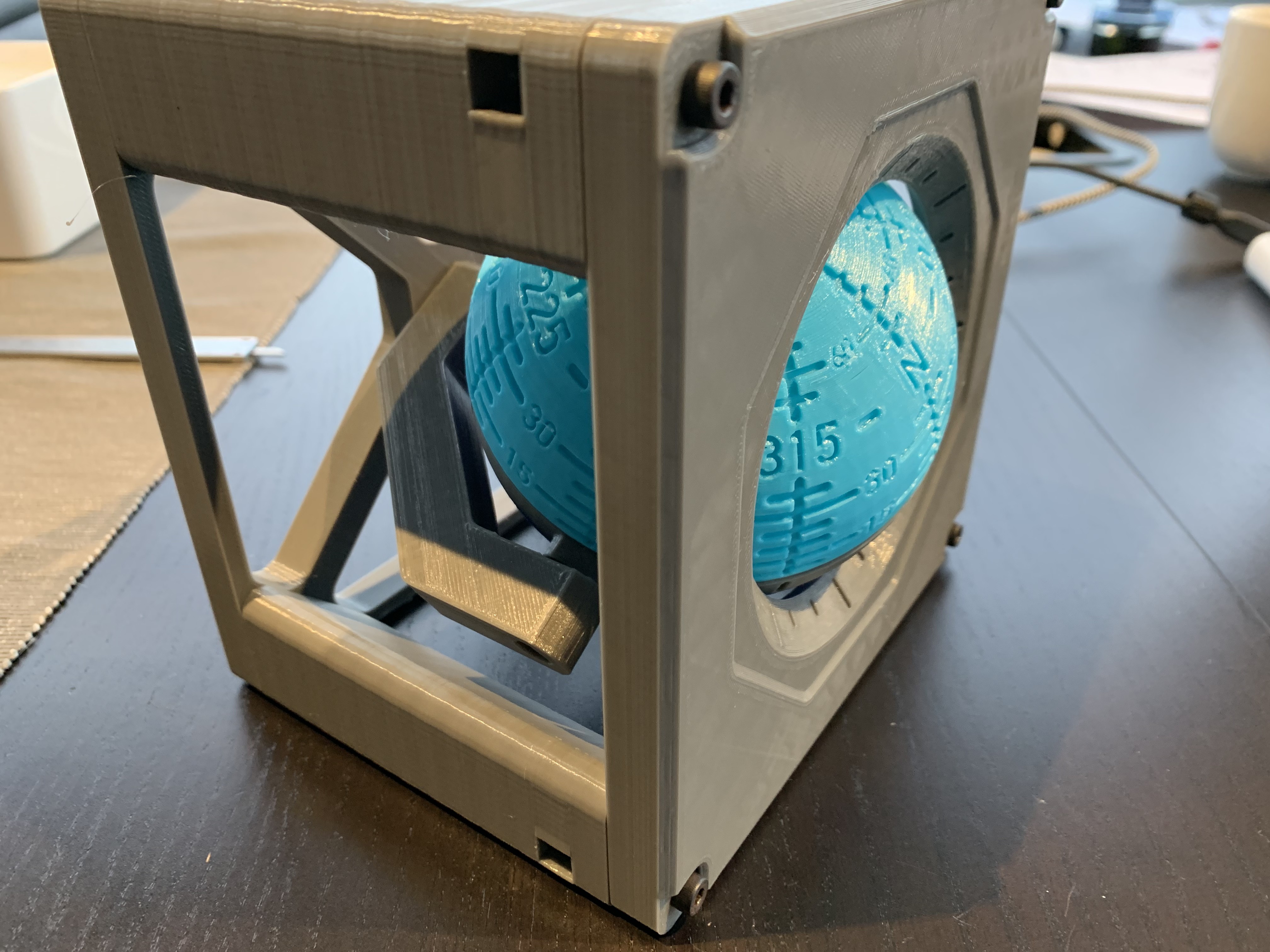
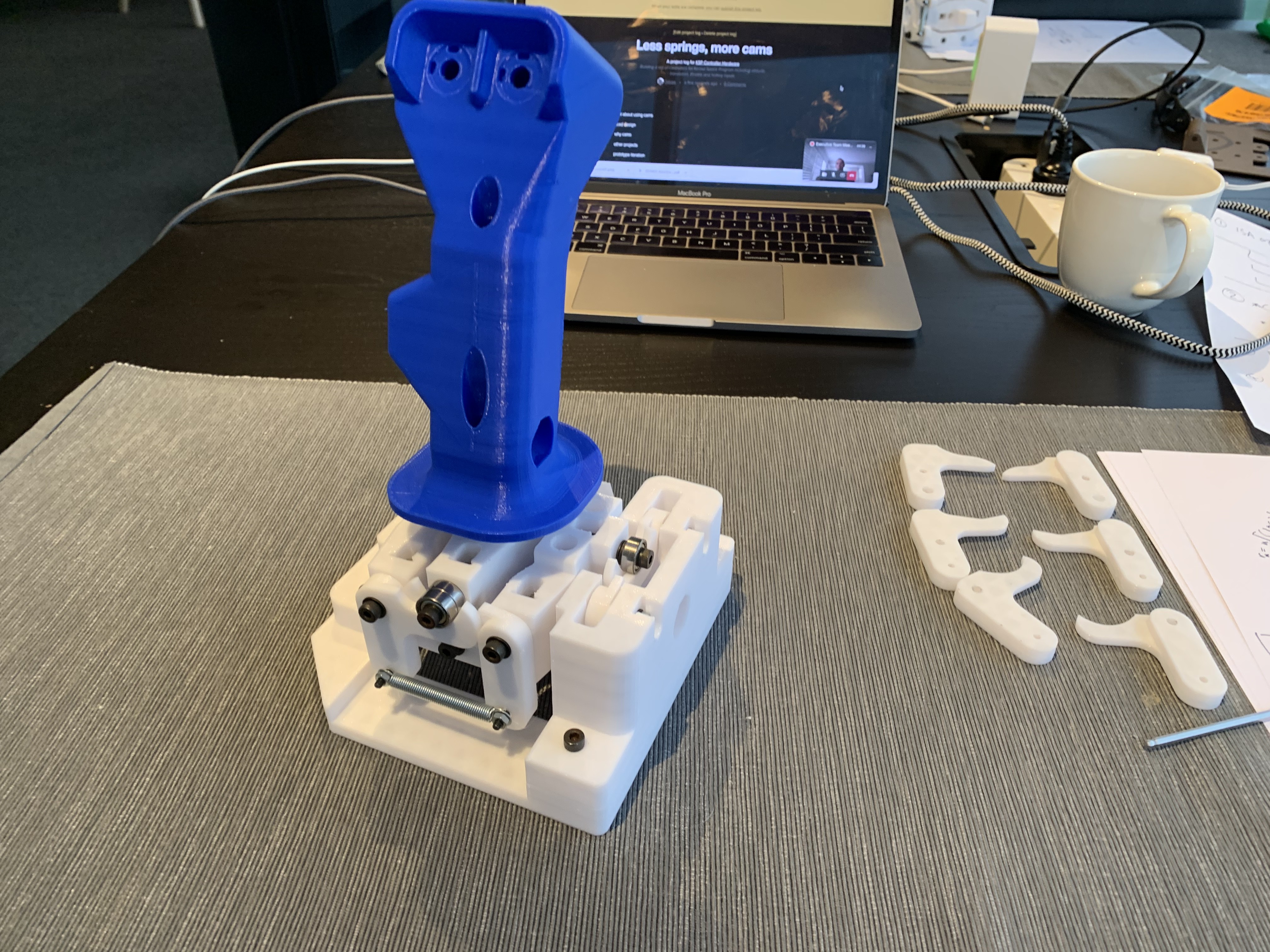
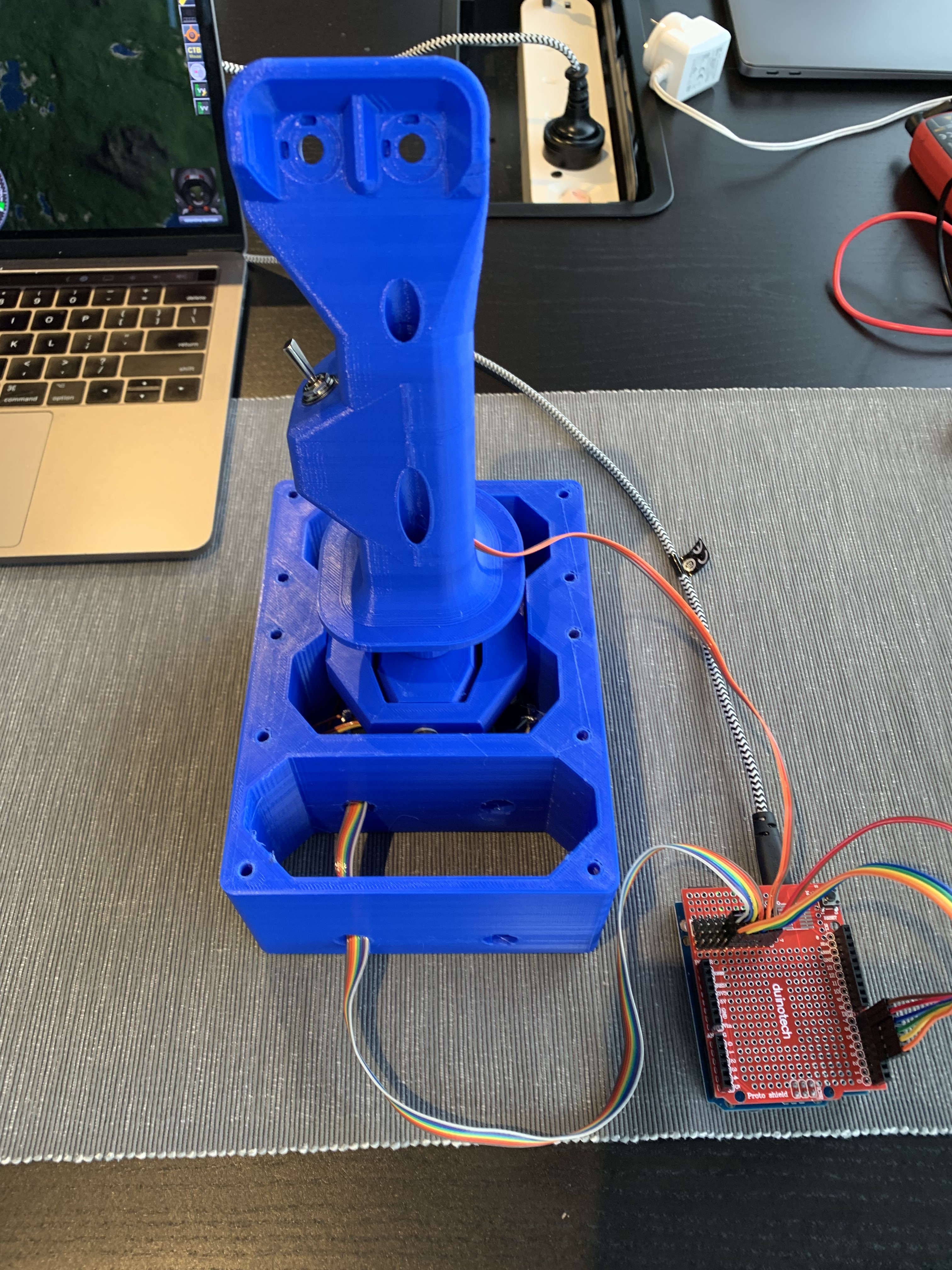
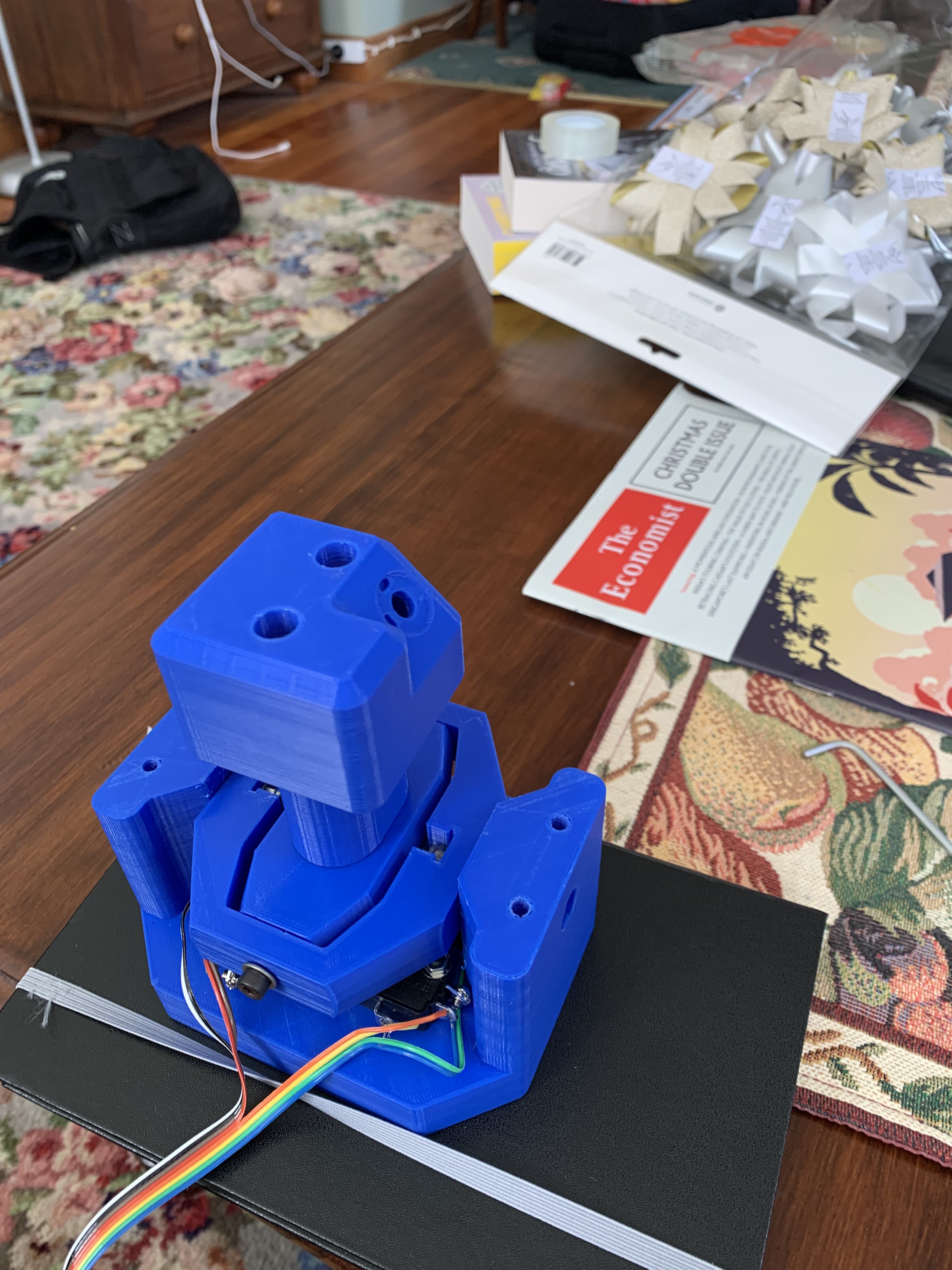
01/17/2022 at 12:17 • 0 commentsSo, for the past few days I've been stuck waiting for parts to arrive. In the meantime I decided to spend the weekend designing and printing this:
![]()
![]()
![]()
The plan will be to motorise it and connect it through kRPC (yep, more waiting for parts on order), but that will have to wait until everything else is finished
-
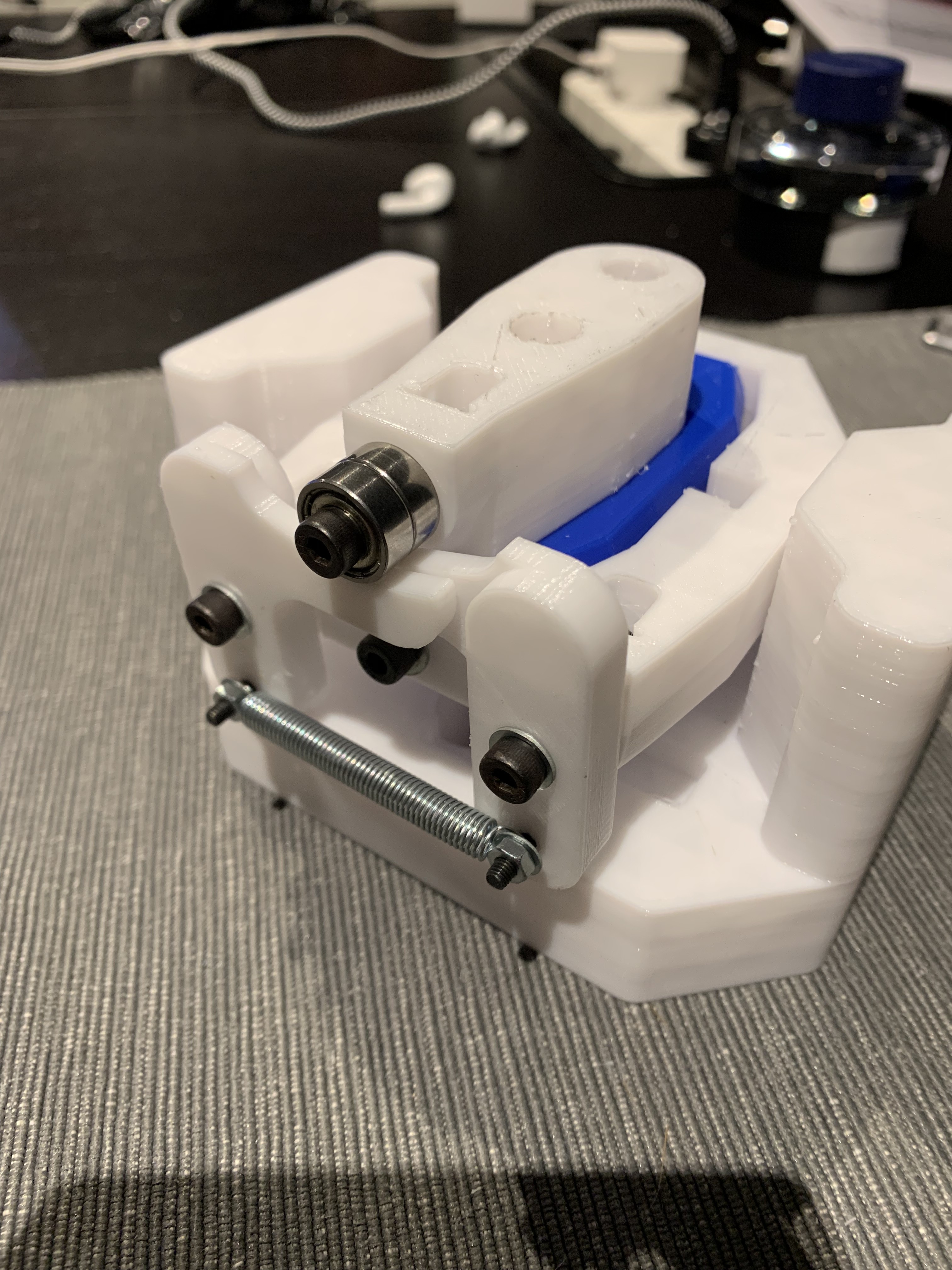
Less springs, more cams
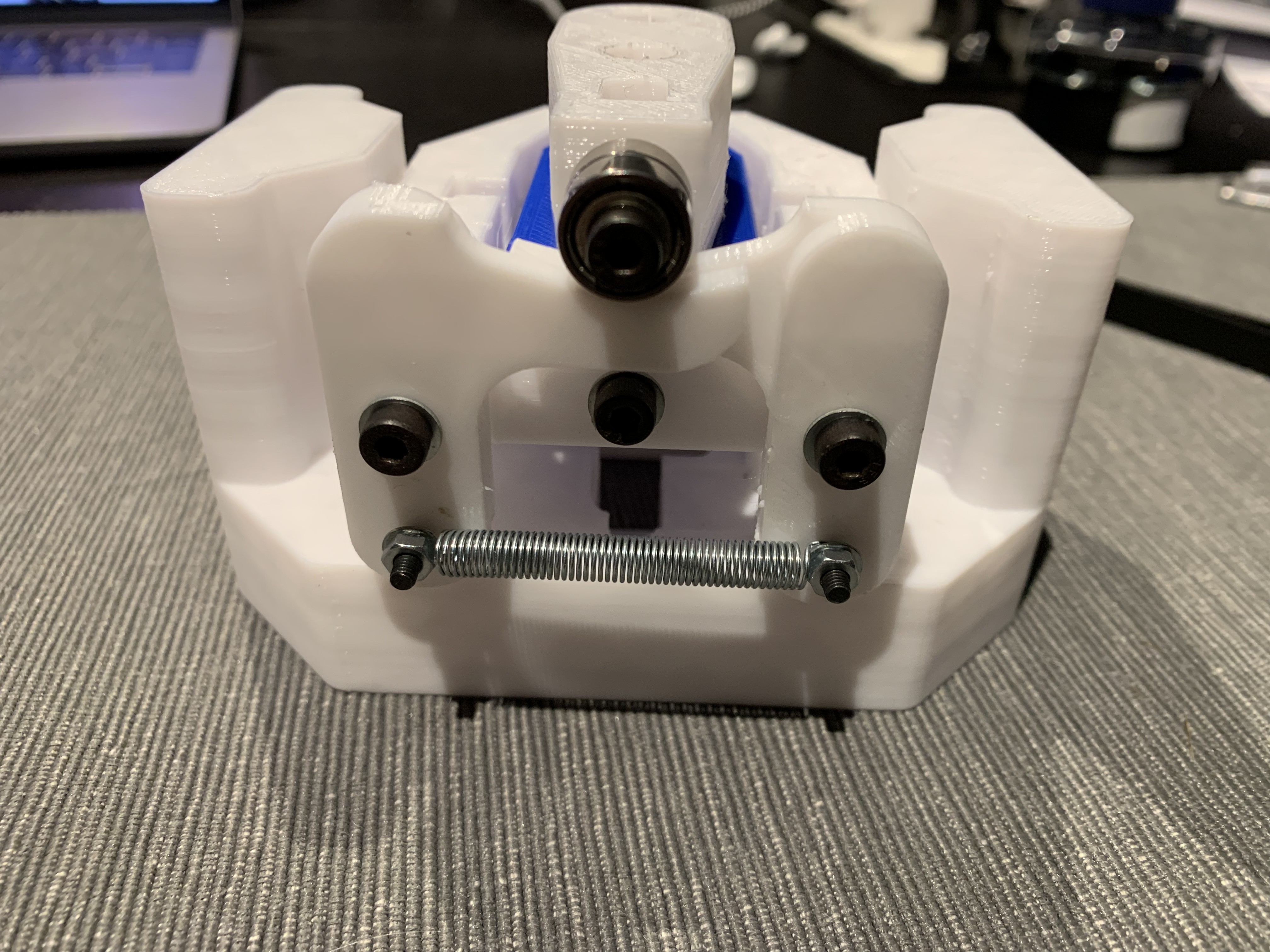
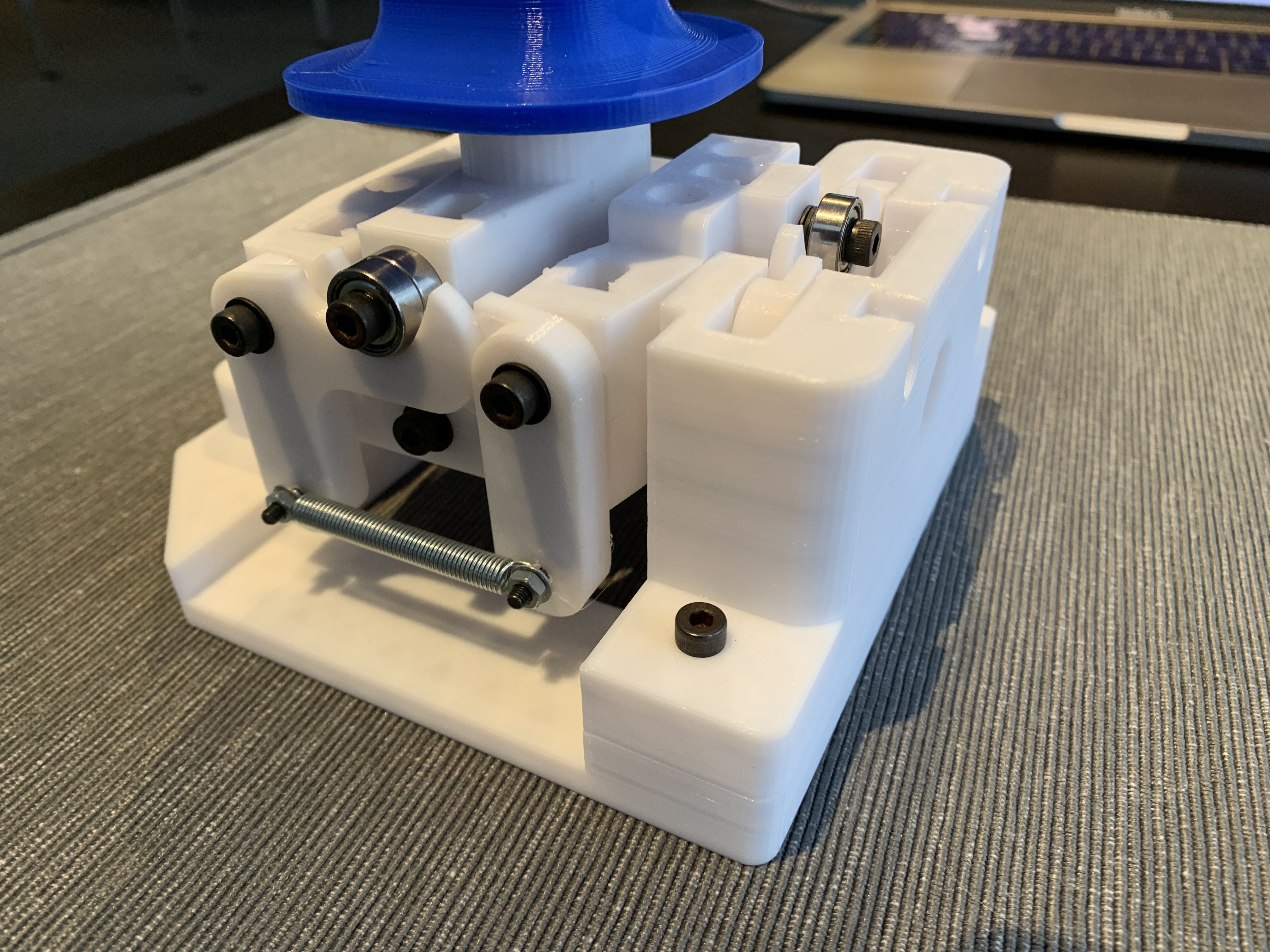
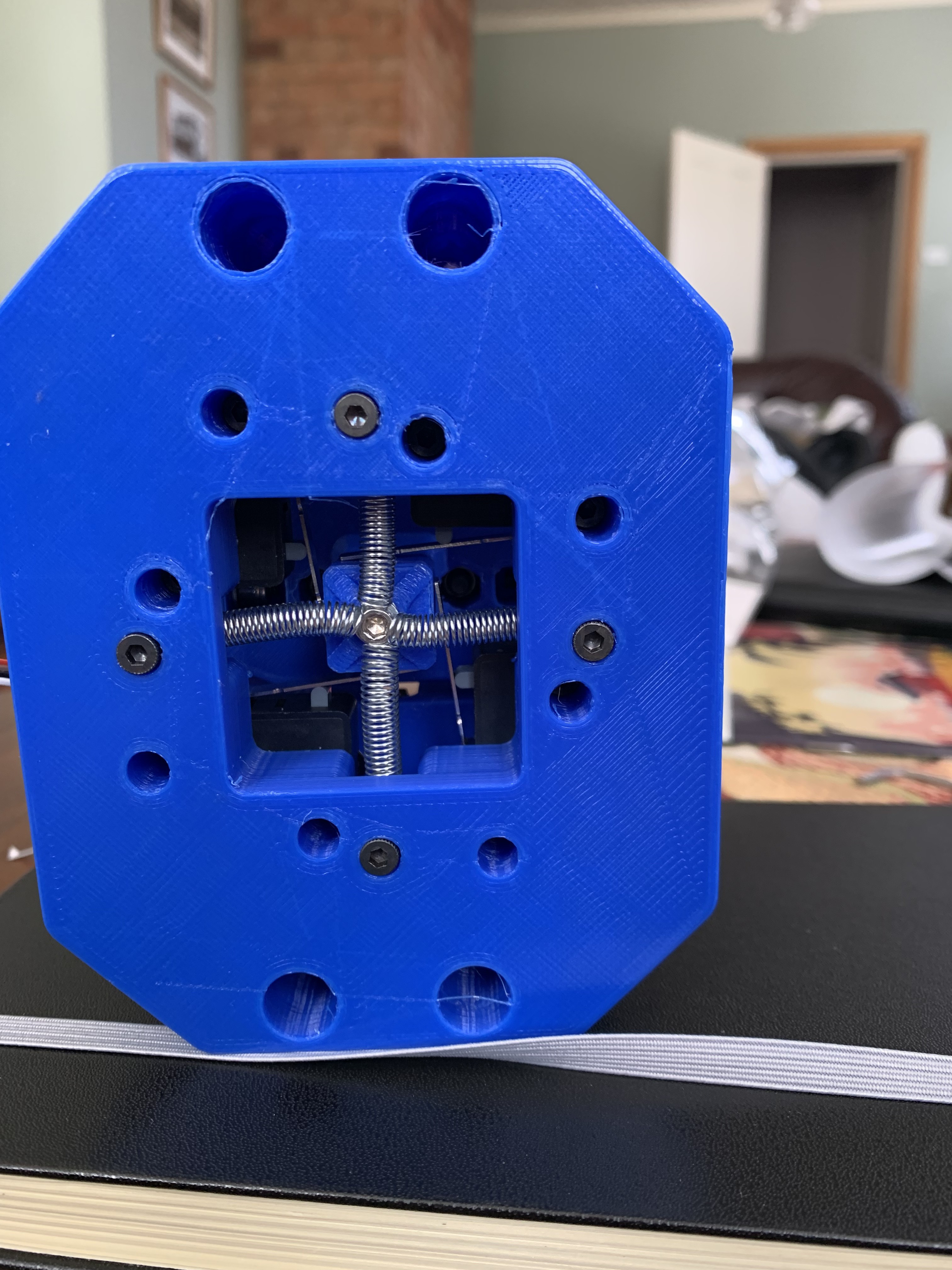
01/17/2022 at 07:55 • 0 commentsAfter using the prototype of the attitude joystick the feel of the return springs was really unsatisfactory. Looking at high-end joysticks the common solution appears to be cams actuated by a roller - as the joystick is tilted a bearing is rolled across a cam surface on a lever, and the lever acts on a spring. Here's the resulting design:
![]()
![]()
By changing the shape of the cam surface you can achieve just about any resistance profile, for example an exponential curve where a small movement away from the center encounters little resistance, but a pushing all the way to the end-stops will result in an exponentially increasing resistance. A linear curve will give the same resistance from the center to the end-stops, and will always snap back to the center. Finally, all of the properties can be combined to produce a completely custom feel.
This isn't a new idea by any means, and you should check out the great work by Olukelo at Thingiverse which provided a great amount of inspiration.
Of course, I went through a lot of design iterations and test prints, here's the first one:
![]()
![]()
It was pretty clear that the pivots for the cam arms needed to be higher. This version also used a really simple design for the cam surface, and it was clear that some more math would be required to create the right shape (more on this below).
Here's the next prototype with cams for the x-axis:
![]()
![]()
The shape of the cam surface is pretty complex, and took a few iterations:
![]()
From top to bottom:
- Cam surface based on a convex and concave circle.
- Next attempt with a really simple v-shape with two straight lines. Because this is a cam, these straight lines do not result in a linear amount of deflection
- This is the first version where the surface is based on a mathematical formula. Unfortunately the formula didn't take into account the radius of the bearing, and so didn't really work
- The first successful version. This weird shape results in linear deflection - tilt the joystick 1 degree and the spring gets stretched by 2mm, tilt 2 degrees and the spring is stretched 4mm, and so on
There's a lot more to the design of the surface, and I plan on going into more detail in a future post.
So, what's next? Unfortunately I'm now waiting on a stack of parts to arrive so that I can make sure that everything works and fits together
-
It works!
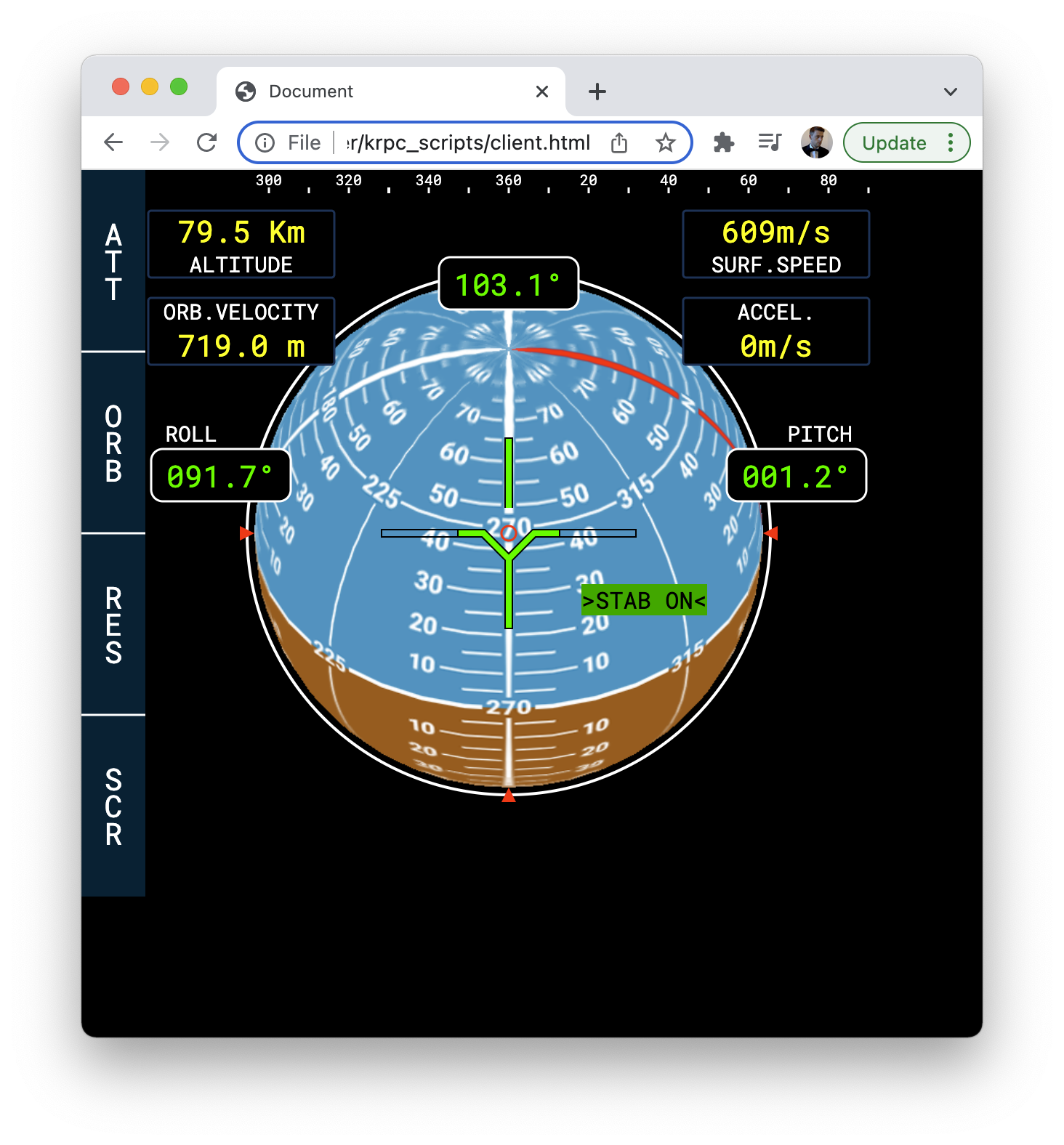
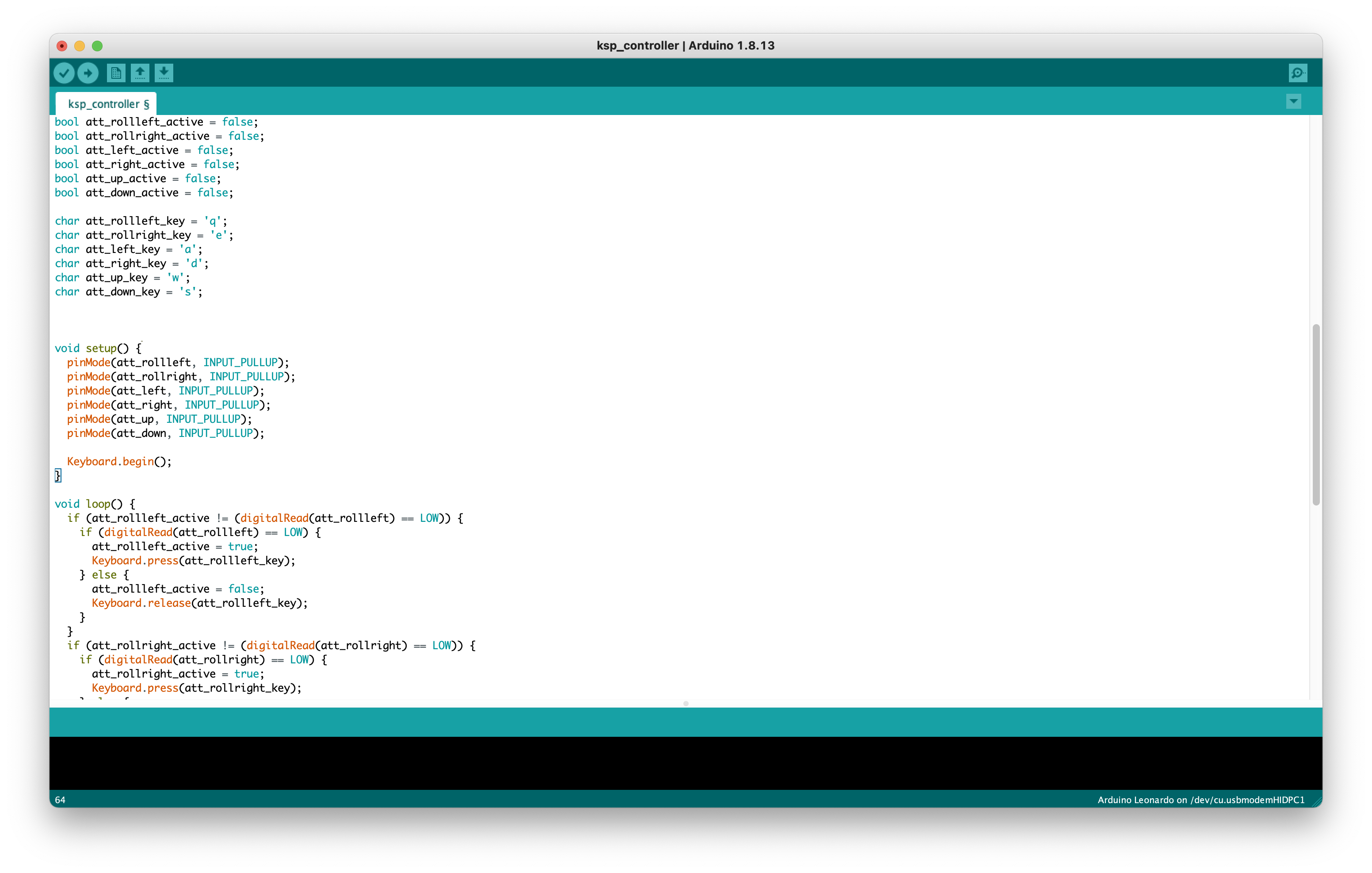
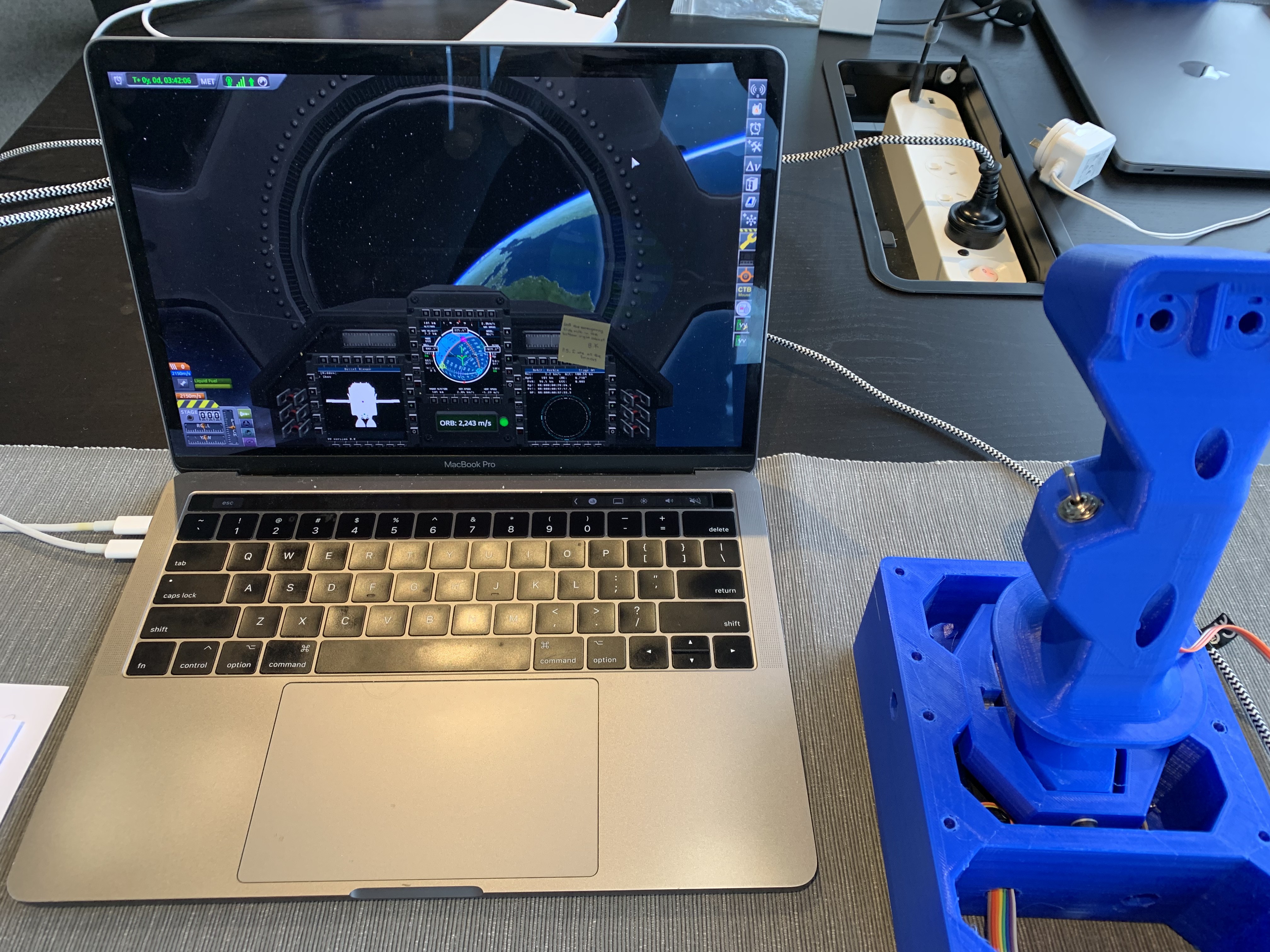
01/08/2022 at 07:13 • 0 commentsAfter completing the assembly and wiring of the first prototype attitude controller, I put together some arduino code and tried it out in KSP.
![]()
The code is fairly simple as it simulates a keyboard with the microswitches of the joystick triggering key presses.
![]()
![]()
![]()
![]()
The code still needs a fair bit of work including some form of debouncing and making sure the latency isn't to high
-
Switch labels in the CW panel
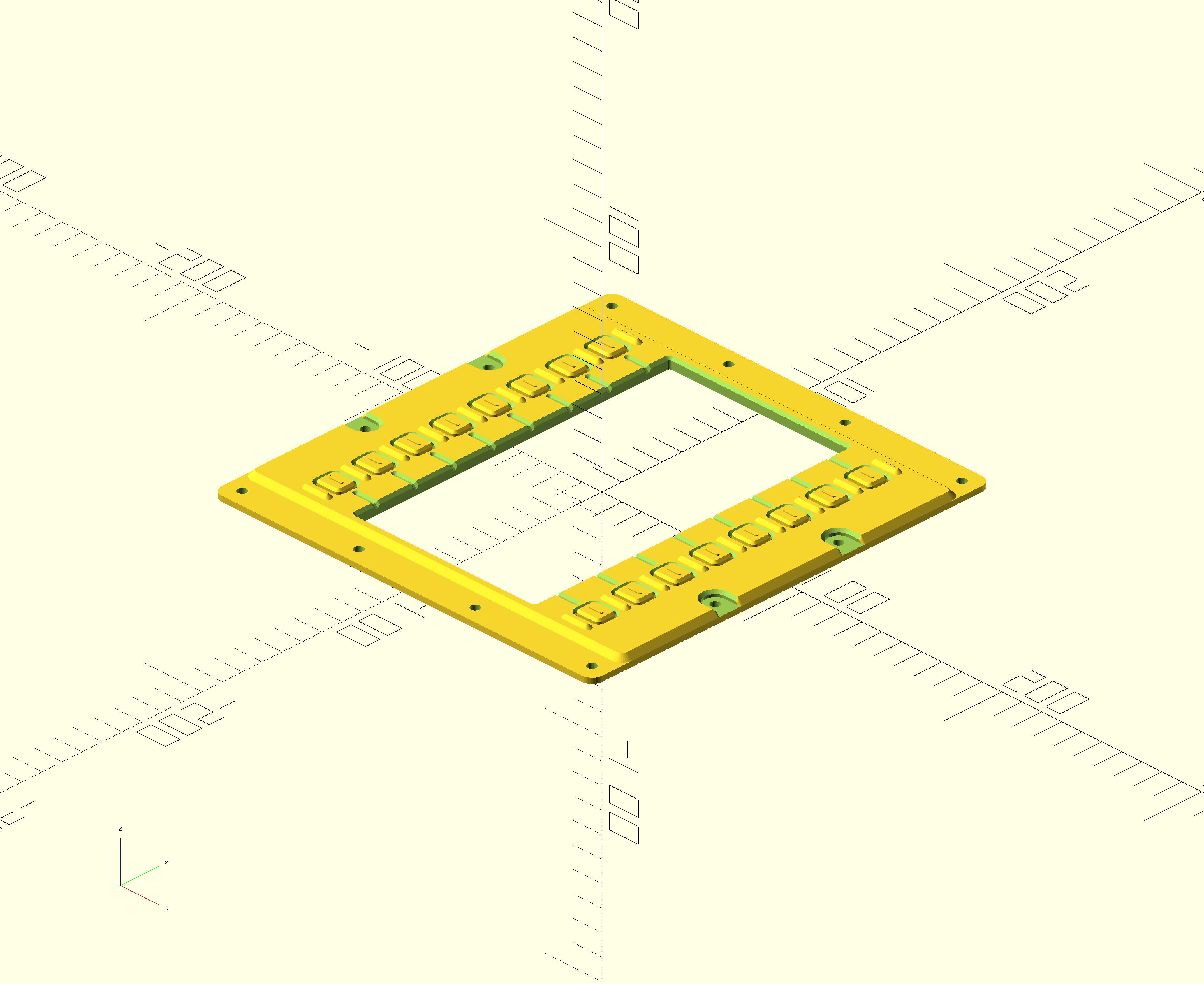
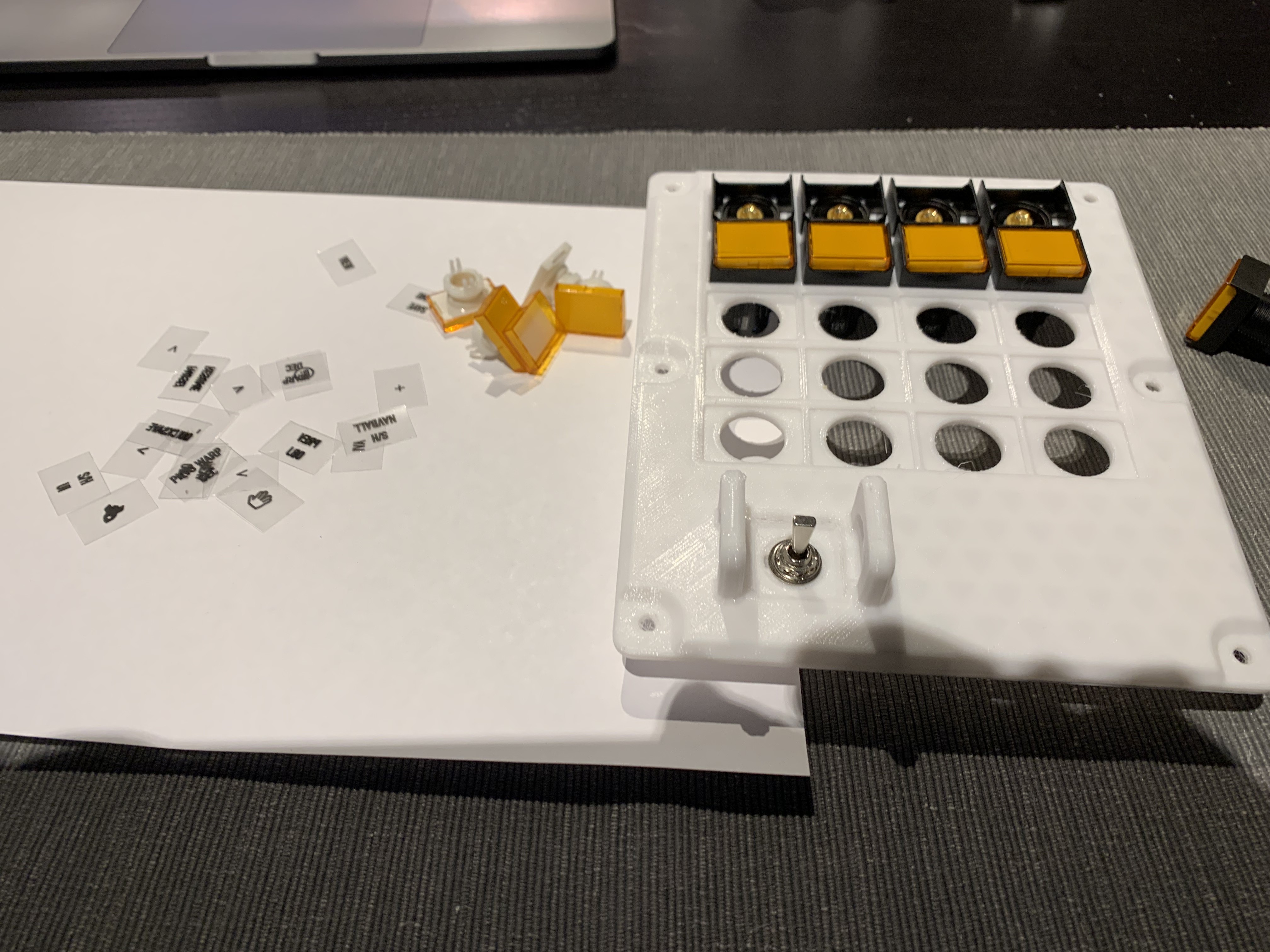
01/08/2022 at 06:57 • 0 commentsI've been working on adding labels to the switches in the caution and warning panel. This name is a bit misleading, as it won't be acting anything like a real caution and warning panel that you would find in an aircraft. There are a lot of useful buttons that aren't part of the simulation, as they don't exist in the real world - things like pause and save, and time warp in Kerbal Space Program. I was looking for a way to have these buttons, but not have them look out of place. The solution I found was to make them look like a caution and warning panel, but with illuminated buttons instead of indicator lights.
Installing labels: the labels are printed on an overhead transparency and cut to size.
![]()
![]()
All switches and labels installed:
![]()
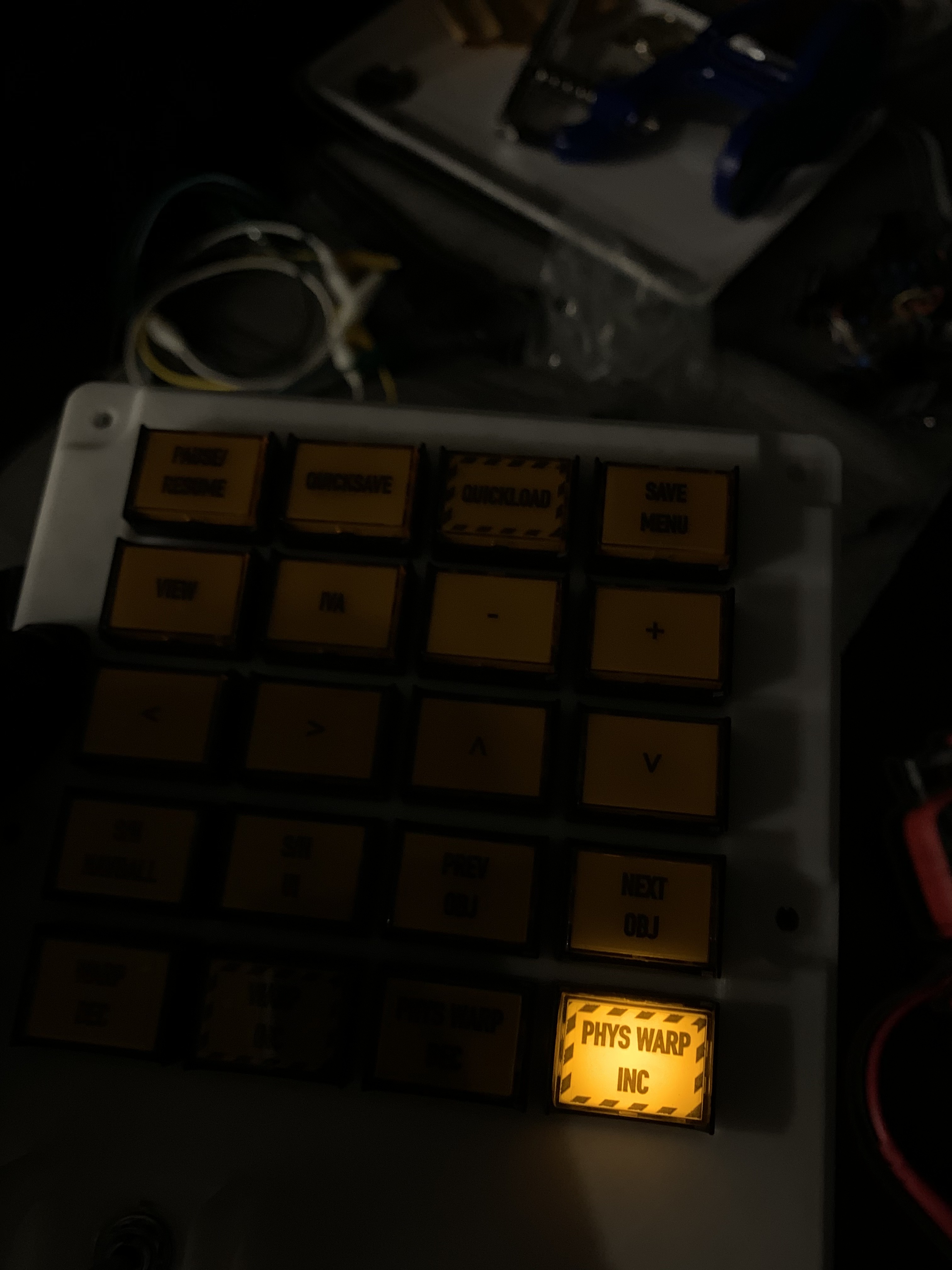
Illuminate!
![]()
There are a few more buttons here than I have inputs on an Arduino pro micro, so I intend to wire these up as a matrix keypad, which will only use 9 inputs (4 columns and 5 rows). As this will involve soldering all of the switches together, this will have to wait until I print the final version of the case (in a more attractive gray plastic).
-
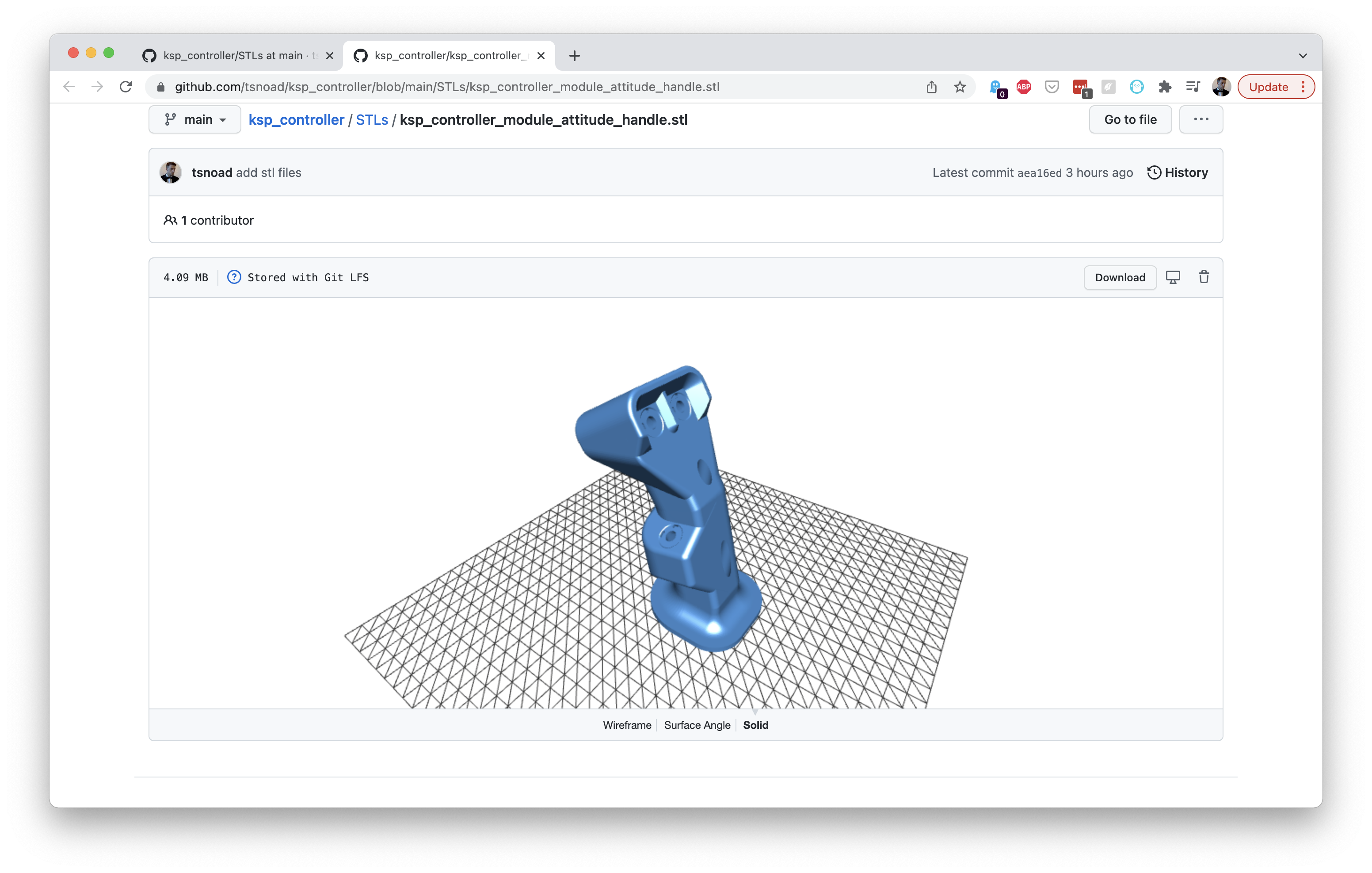
Files added to Github
12/28/2021 at 09:00 • 0 commentsOpenSCAD files have been added to a new Github repository, and the repo linked from the project page. I have also added some printable STL files, and will be adding more going forward. In the process I learned two awesome things, first that git can handle binary files using git-LFS and that github is able to display STL files. You can access the github repository from the link on the left of this Hackaday project page, or directly here https://github.com/tsnoad/ksp_controller
![]()
-
Assembly update
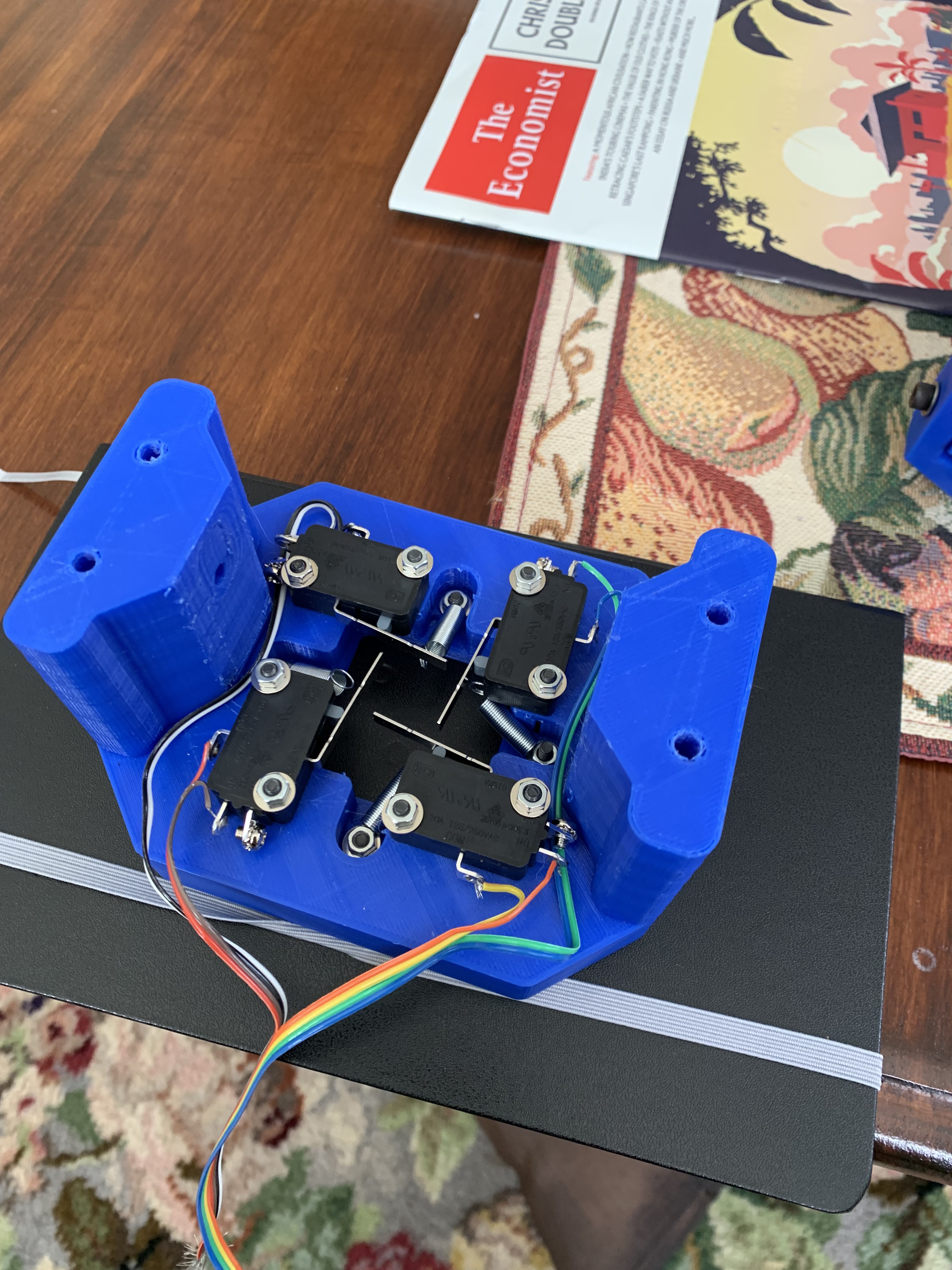
12/27/2021 at 23:46 • 0 commentsinstalling springs. These springs provide return and centering for the joystick.
![]()
Installing microswitches:
![]()
Installing the pivot mechanism and the translation controller:
![]()
Attaching the springs to the center of the pivot mechanism. This is also what actuates the microswitches.
![]()
-
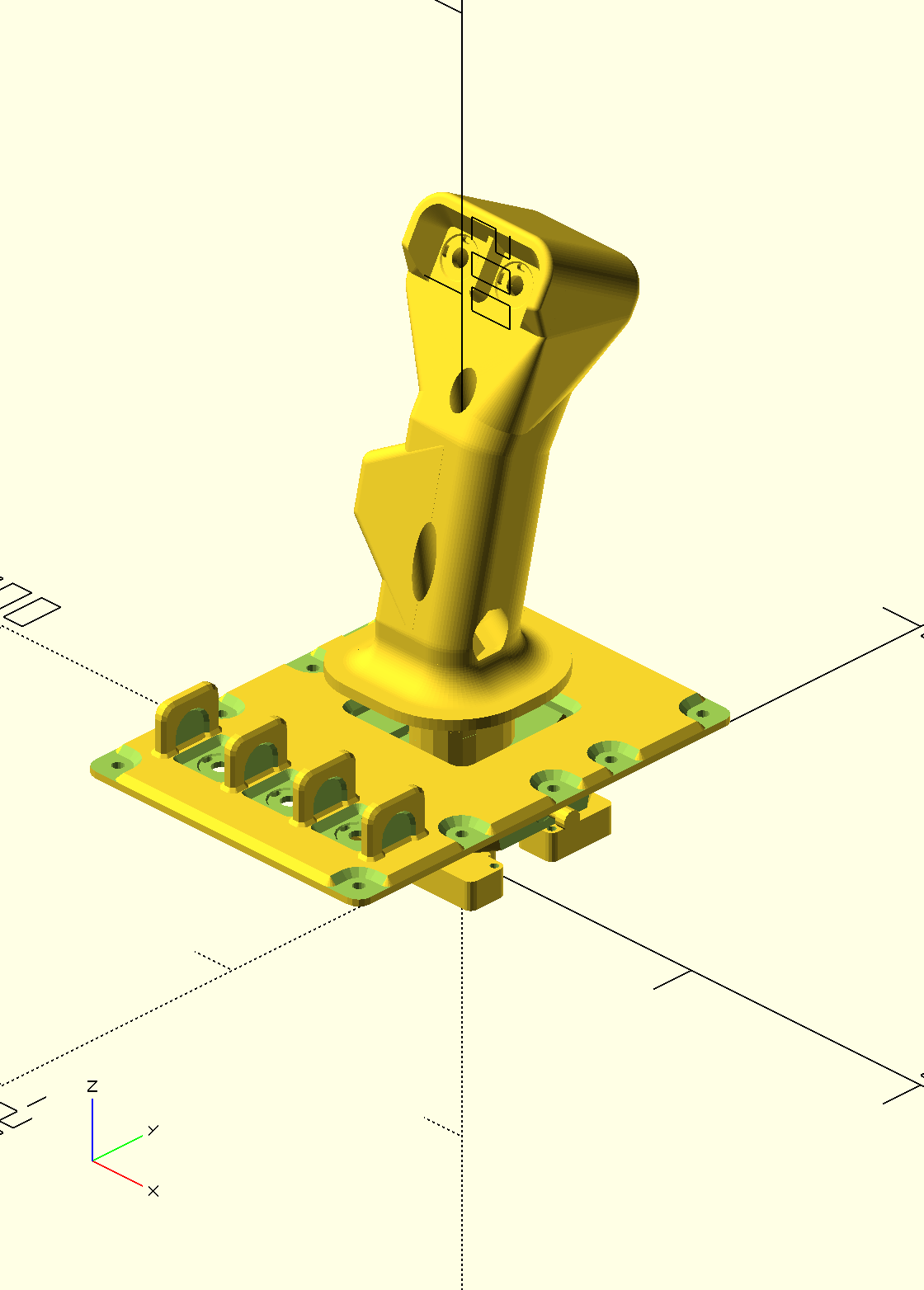
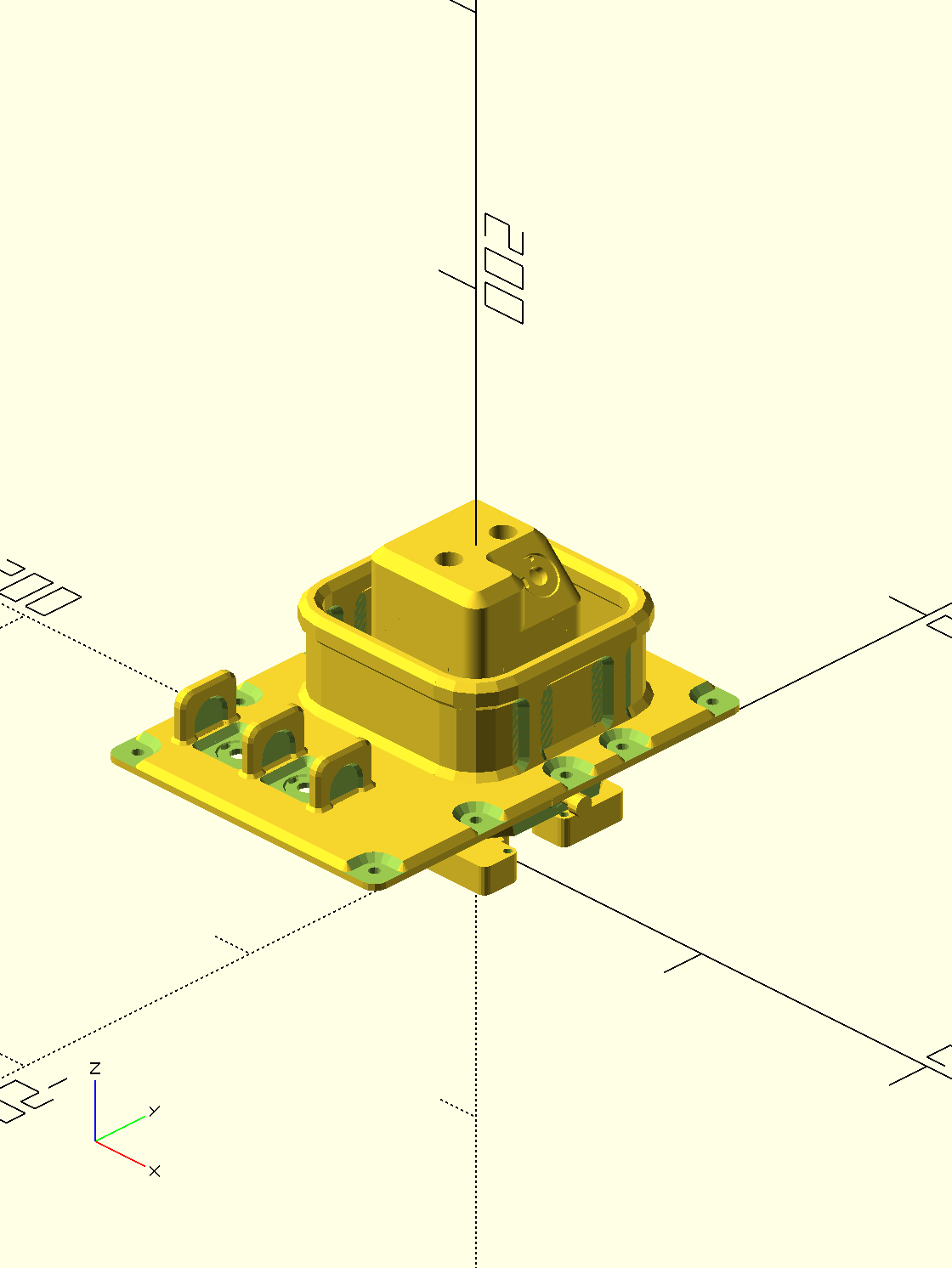
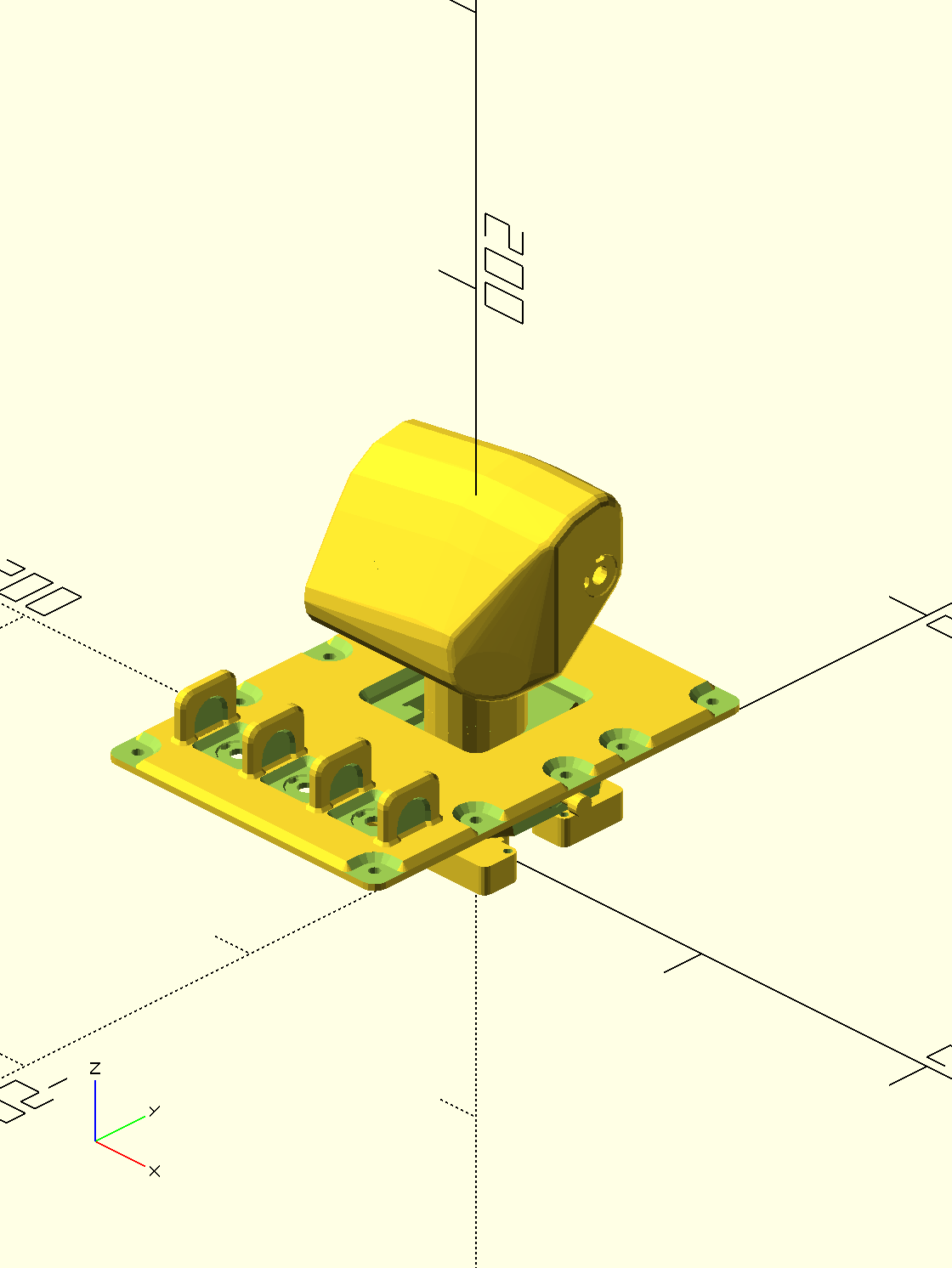
Animation of exploded assembly
12/27/2021 at 07:52 • 0 commentsAnimation of the exploded assembly of the translation controller. The translation controller is the joystick that moves the ship forwards/backwards, up/down, etc in linear movements, as opposed to pitch, yaw, etc provided by the attitude controller.
![]()
-
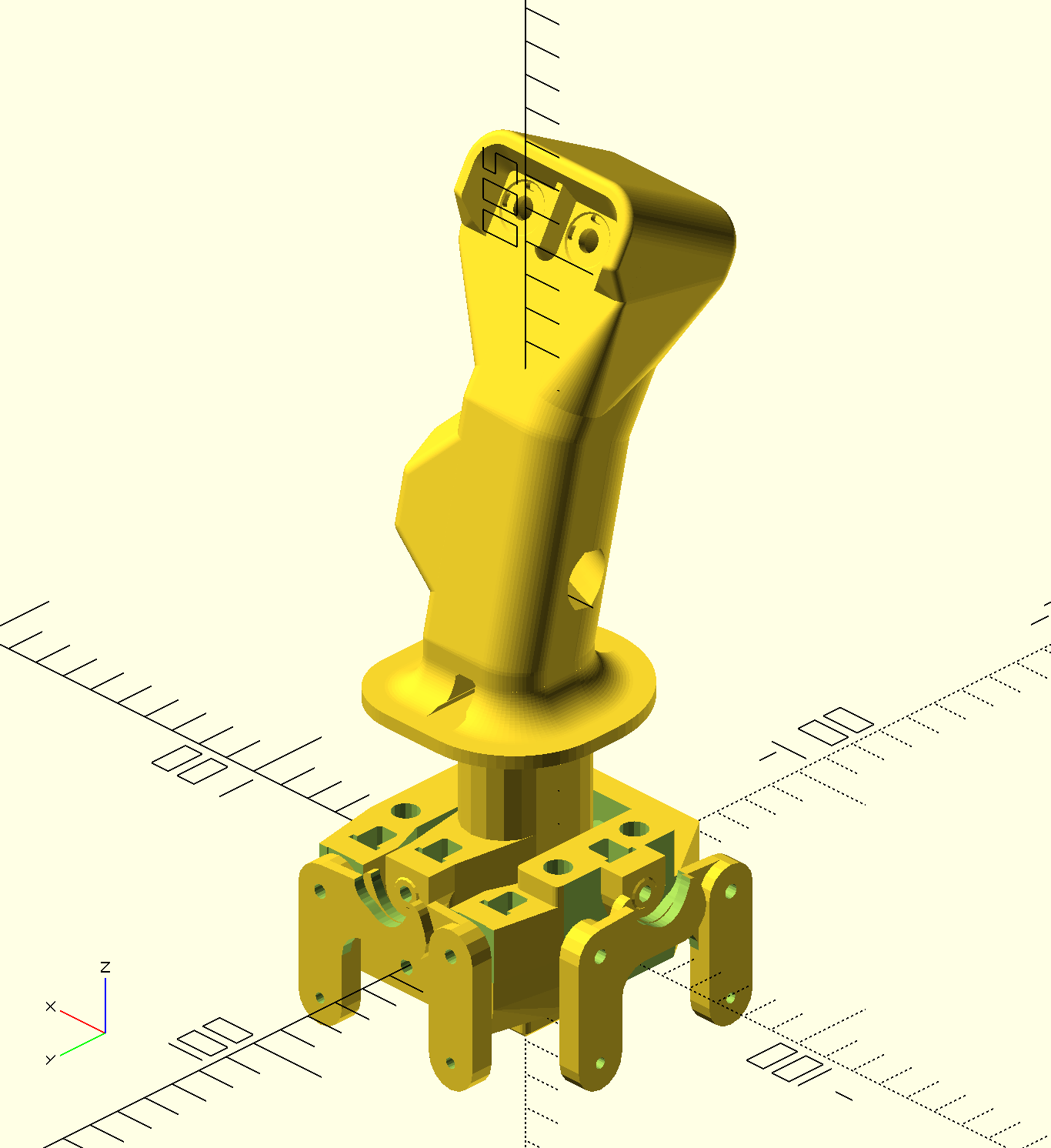
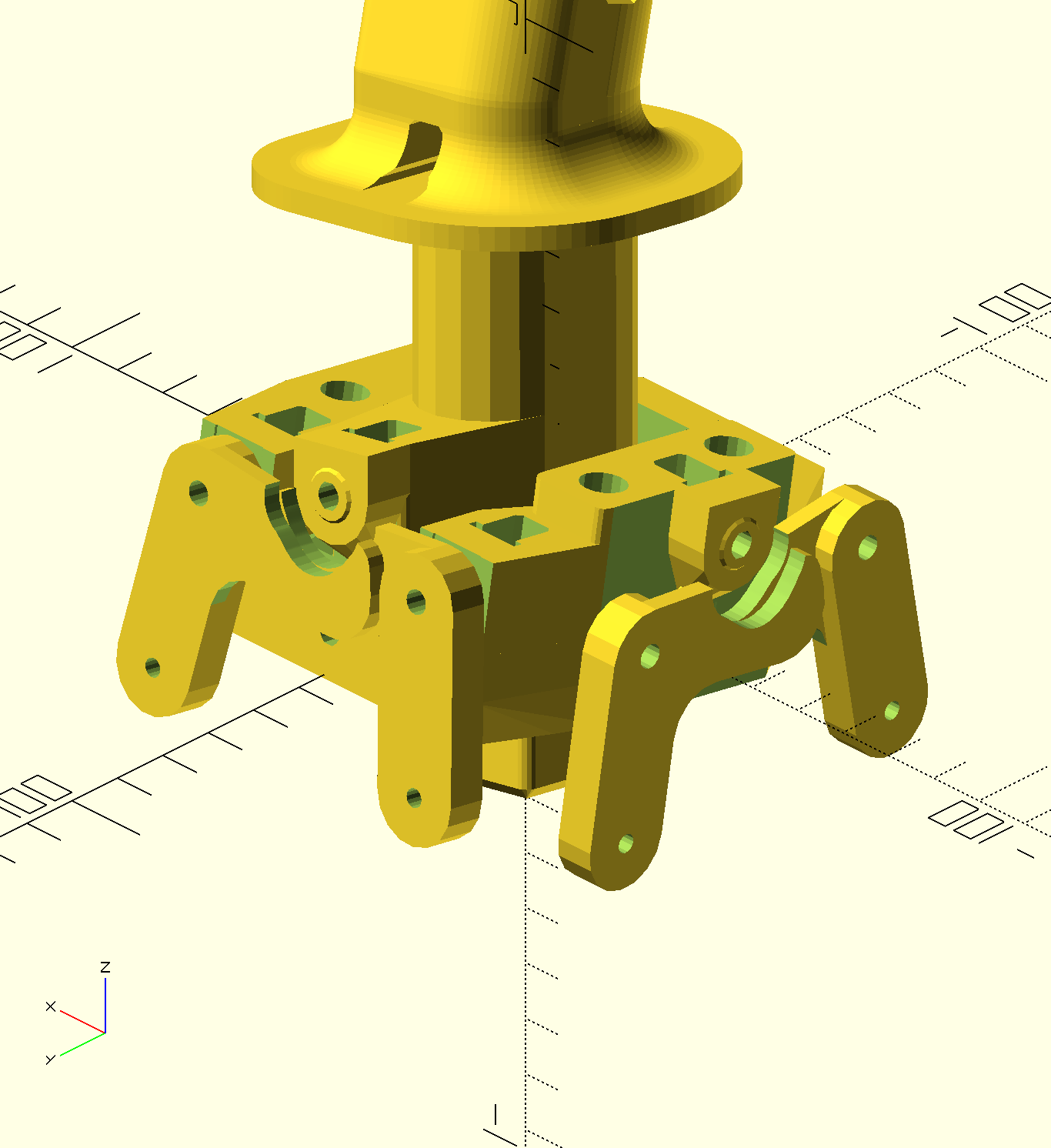
OpenSCAD modelling update
12/27/2021 at 07:26 • 0 commentsFirst round of OpenSCAD modelling is complete, and files have been uploaded. There's still a lot of work to do, and there will be many clearances and tolerances to update, so I'll be adding the github repo soon
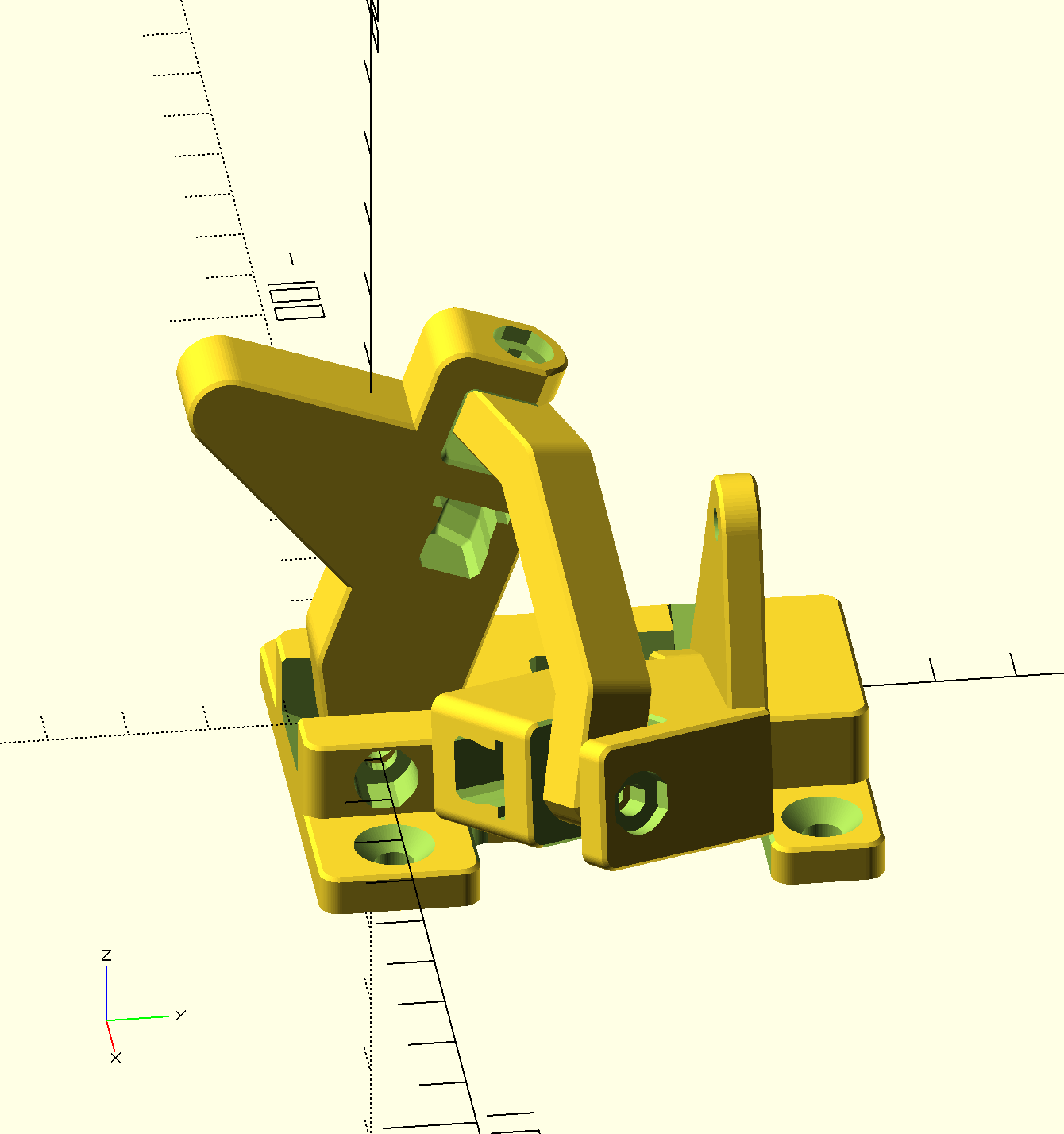
Attitude controller:
![]()
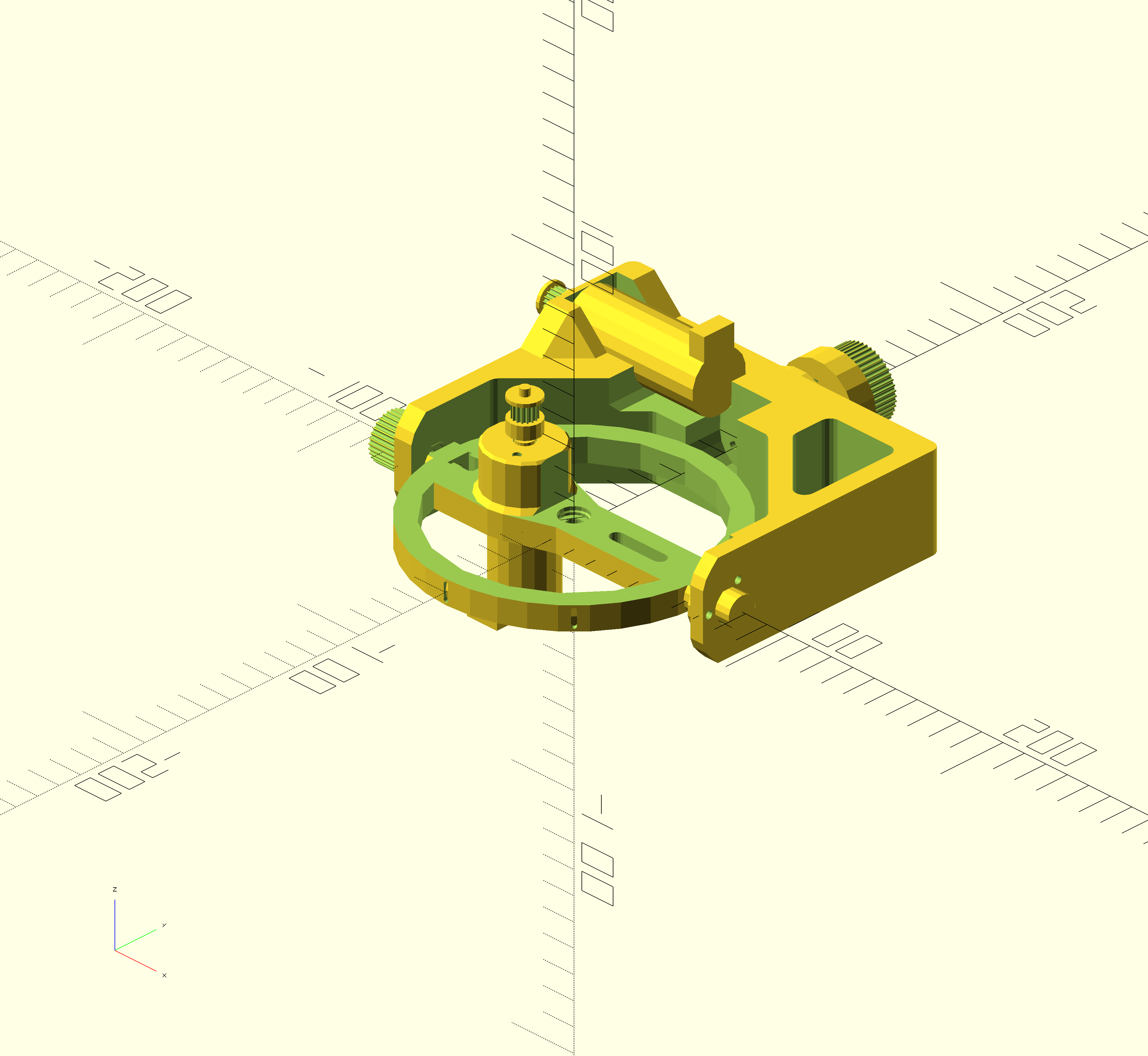
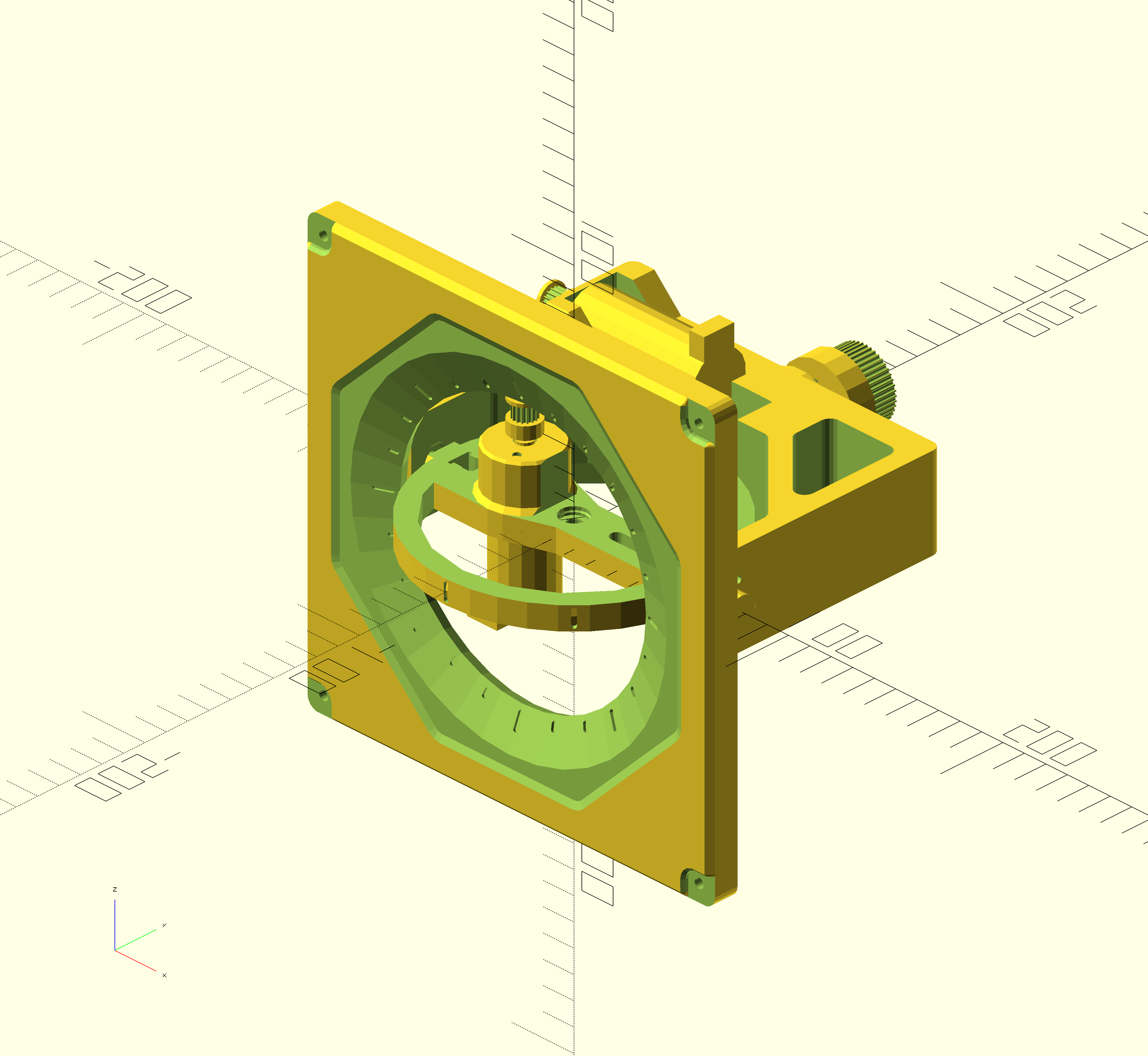
Translation controller:
![]()
Thrust controller:
![]()
Switch panel:
![]()
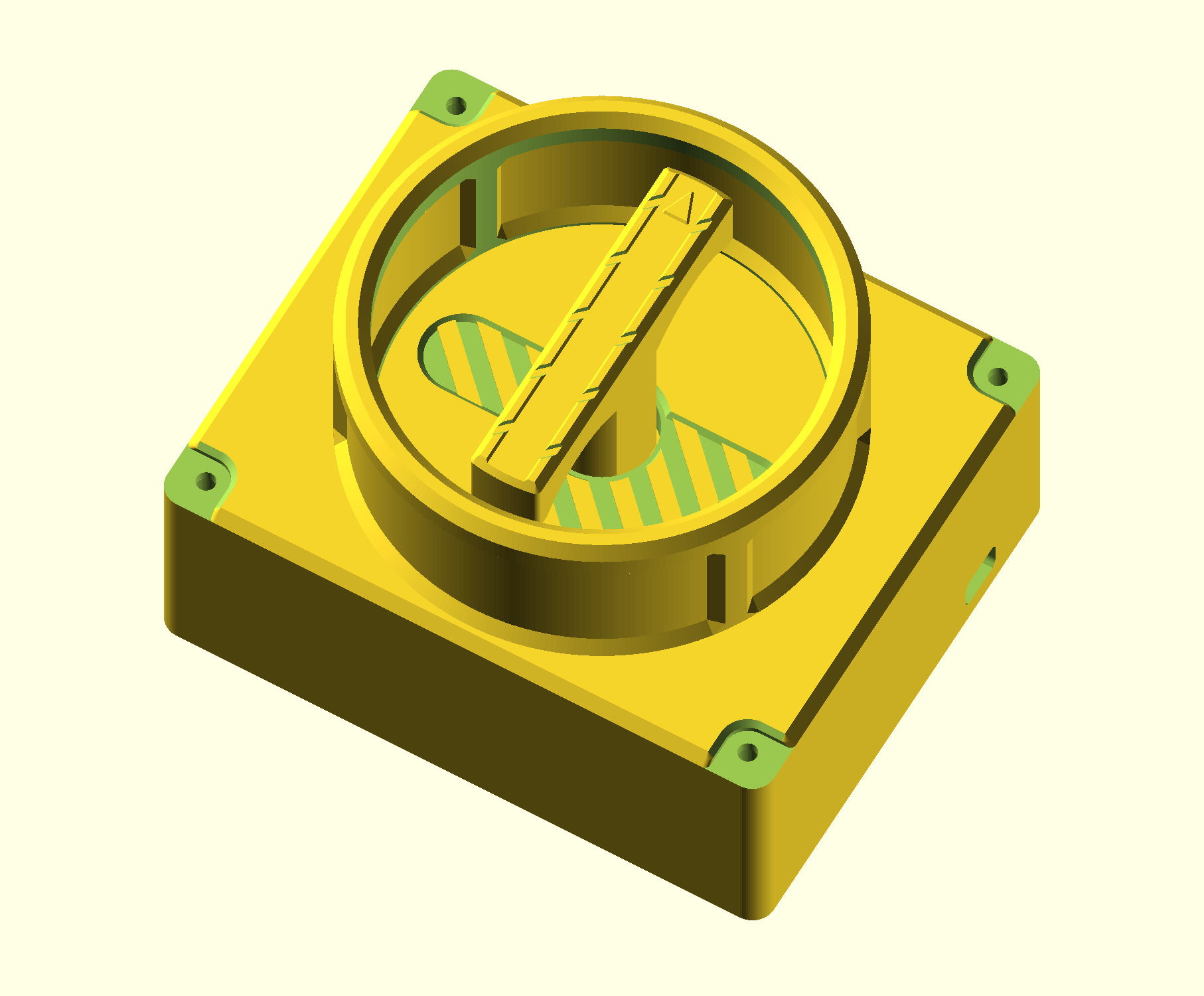
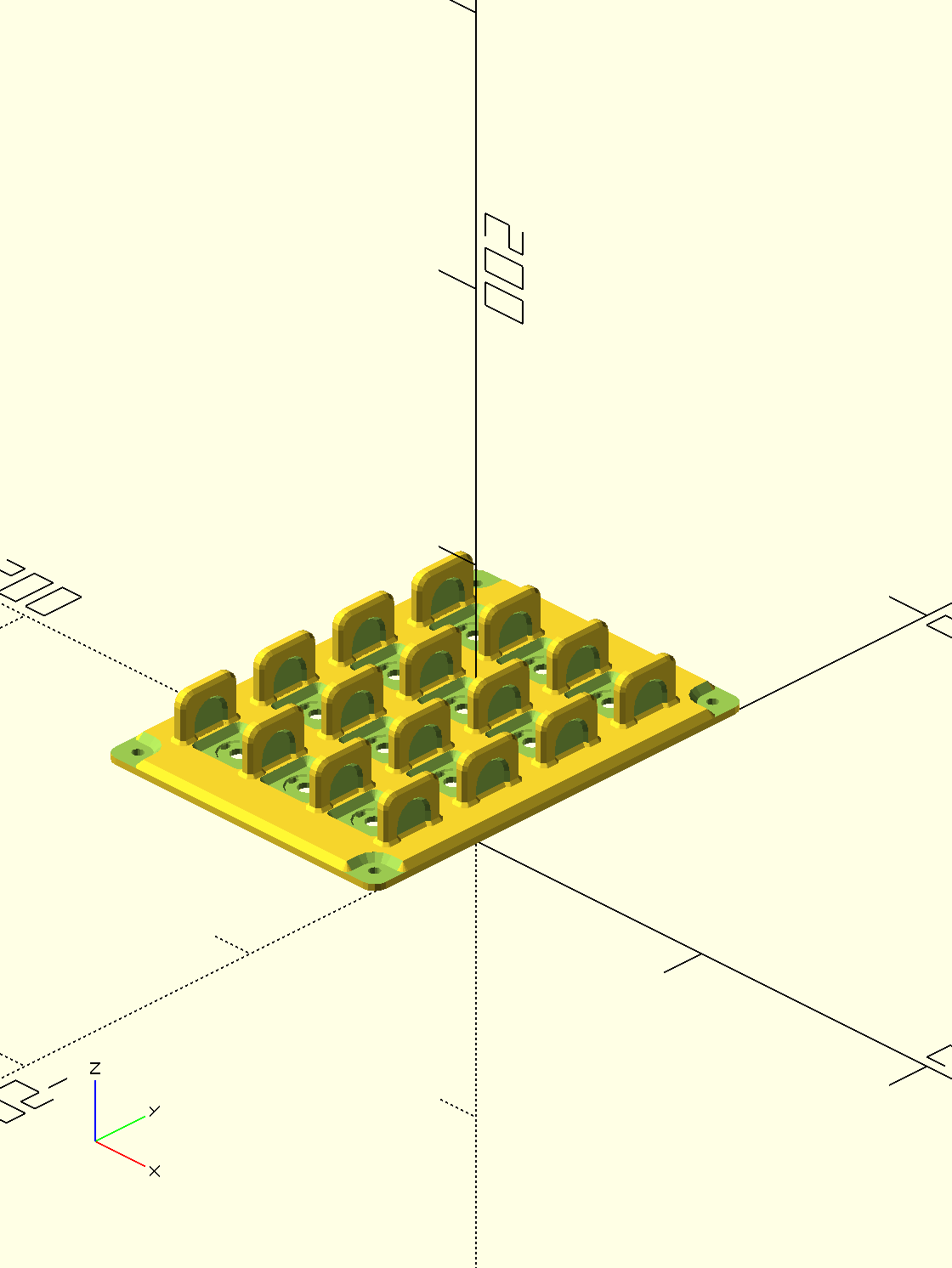
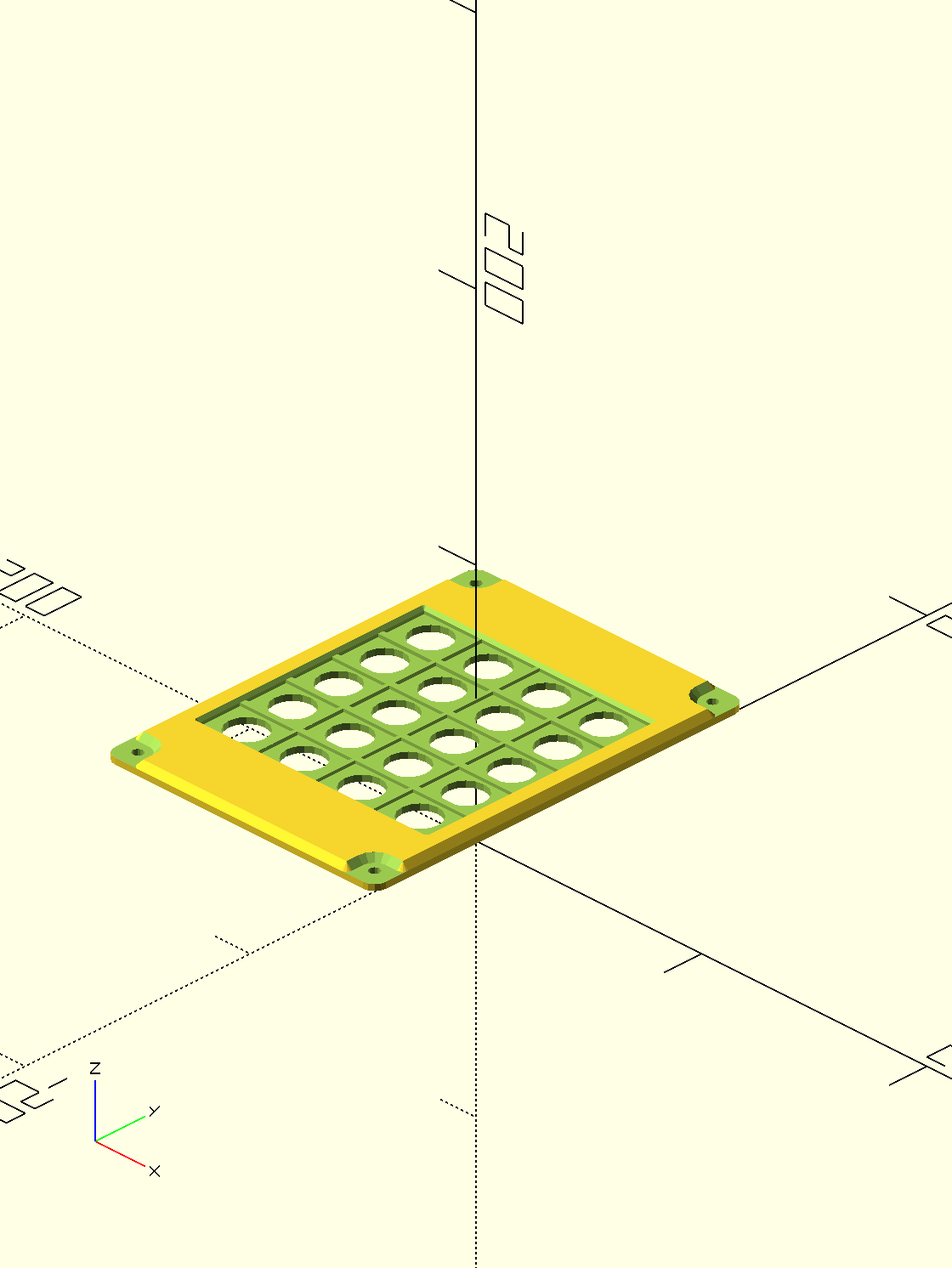
CW (caution and warning) panel. At the moment I'm not going to be pulling data out of KSP, so this will be another input for game functions that aren't simulations (pause, save, etc).
![]()
KSP Controller Hardware
Building a set of controllers for Kerbal Space Program including attitude, translation, throttle and hotkey inputs