 kelvinA
kelvinA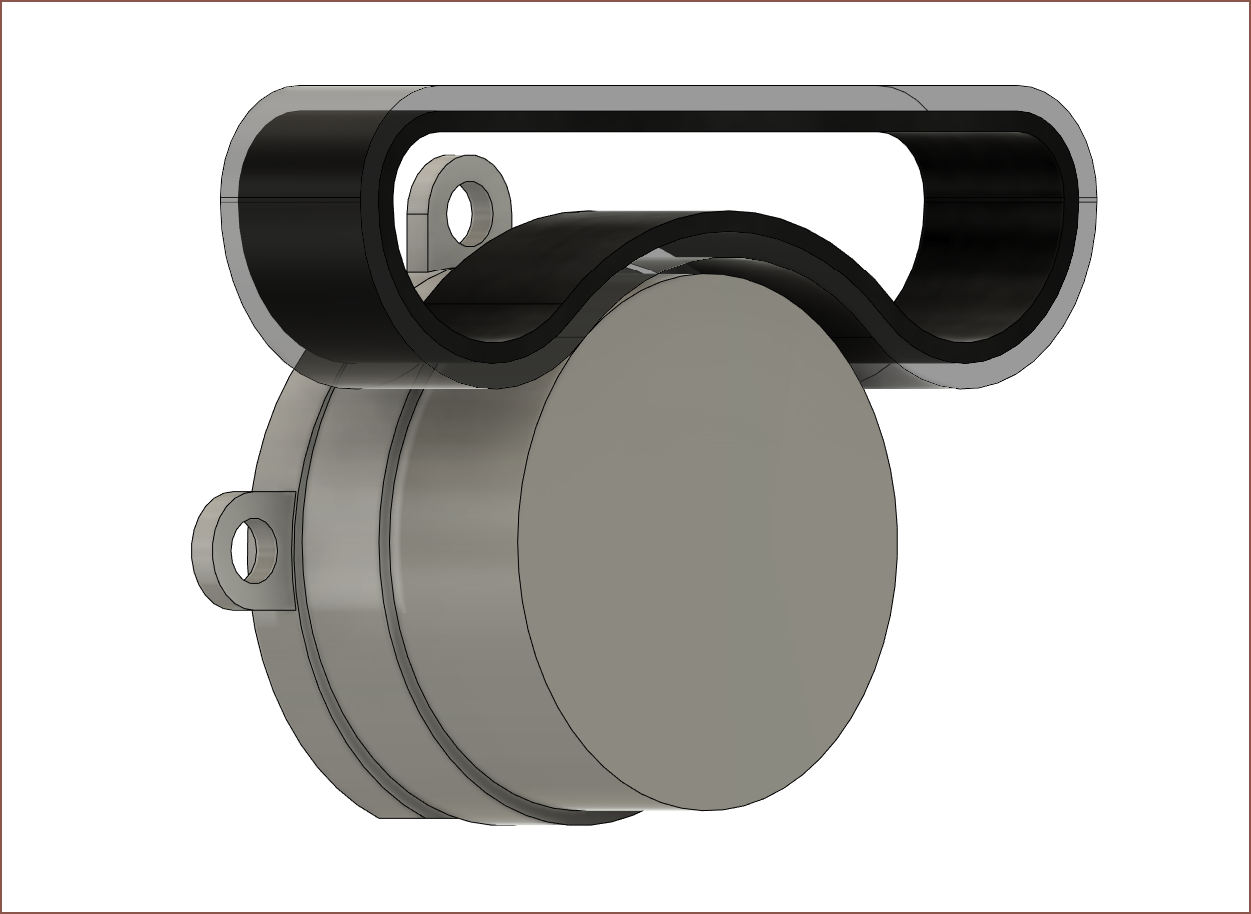
At the start of September, I had the idea of having something like a GT2 belt that goes around the whole switch (main part) and having something like bearings or slippery tape as an interface between the belt and key. The pros could be less friction than fingertips or nails (allowing to move to another key without finger lifting) and a consistent feel under the keys (reducing distractions). I was also hoping that it'll feel more satisfying, like a fidget toy. It probably would sound more satisfying than nails (lightly) scratching plastic.
Other than the potential length and height increase of the keycap to account for the belt, another issue was that I still hadn't computed how I was going to accurately detect finger position on the key. Ideally, I'd like those with long nails to not be left out, and I also don't know what kind of environmental conditions may affect an extra-sensitive capacitive trackpad since I've never heard of a proximity trackpad in the wild. There's also the shipping delays from a PCB fabhouse since #SecSavr Suspense [gd0105] doesn't exist yet. It's kind of a chicken and egg situation.
I thought it over for a few days because I had a feeling that there was potential, and I decided on going all in on the GT2 belt, using it as the detection interface (I tried moving my CR600S-in-pieces with my nail inbetween one of the teeth and the belt off the motor (so that the axis moves freely, simulating my idea)). If the friction is low enough, there's no need to lift my fingers.
The homing / calibration procedure would be like the endstop "bump" of 3D printers when homing, but for both the min and max reach of the fingers. A user such as myself would have to do this anyway so that I know where my fingers are too. Hopefully, the gesture could also differentiate between the left or right hands so that belt recalibration and "switch sides to match hand" are both done in the same gesture.
That's nice, but now that there's a belt, why not a motor for true coolness?
Me: That's nice, but what about the power consumption?
Me2: Yeah but it's a tiny motor moving a low friction belt and your fingertips.
Me: Idunno... what about size?
Me2: That 6mm belt we just tried didn't feel small at all. It's probably because the fingernail is curved so there's not that much width actually in contact. It could look pretty cool on the #Tetent Timespy [gd0136].
Me: hmm... Can you get motors that small?
Me2: True. I know of micro steppers but I've only known about brushless motos for electric skateboards and scooters. Oh I know. Remember that guy that made a keyboard with a motorised knob? It's got to be pretty small for that use case.
Me: [watches video clip]
Me: Ok I need that. No... no I want it but... oh and then there's multi-axis mode where I could switch between frictionless, spring-back, dedents, inertia...
Me2: Hey, couldn't you use this to help train by moving your fingers to the exact location? It's like someone guiding your hand when learning how to chop veg or something. Like, what other keyboard can do that? Then you can focus on pressing the correct button level at the start of the learning process, or feel how fast you need to move for that 280wpm dream.
Me, who has learnability as the top priority:

Researching motors
The motor that peng-zhihui used is both too large and out of stock. He does recommend to find a low KV motor. I dug around on AliExpress and the first notable mention I found was this.
 It's a 630KV motor that has a 16mm outter diameter and the lowest price costs like £15 for 12. I had found a 14mm diameter motor, but the KV was an astronomical 4300. After another hour or two, it seemed that this was going to be the best motor, but when I imported as many side-on pics of it as I could find into Fusion360, it seemed that the motor was going to be over 21mm, which isn't going to fit.
It's a 630KV motor that has a 16mm outter diameter and the lowest price costs like £15 for 12. I had found a 14mm diameter motor, but the KV was an astronomical 4300. After another hour or two, it seemed that this was going to be the best motor, but when I imported as many side-on pics of it as I could find into Fusion360, it seemed that the motor was going to be over 21mm, which isn't going to fit. 
Today, a seller got back to me, which confirmed my suspicion.



This was the same time that I had just found another motor and was wondering if the price difference and ribbon cable could be justified.

This motor is 16.3mm in diameter, doesn't look as cool as the first one in my imagination, but has a KV of 580. It's also 11mm high, but lacks any of the convinient threads of the silver motor.

The silver motor is 8g and this black one is 10g, which I think is probably fine.
Geometry woes
Now the idea I had looked like this beautiful, compact compression of parts neatly in a 30x20x18mm package, but the motor is miles out.
 The length of the key also had to be increased to 32mm for a realistic bend radius of the belt whilst still allowing 24.8mm of flat section. The UHMW tape is also not negligible with it's 0.28mm thickness.
The length of the key also had to be increased to 32mm for a realistic bend radius of the belt whilst still allowing 24.8mm of flat section. The UHMW tape is also not negligible with it's 0.28mm thickness.Yesterday, I thought it meant that the motor wasn't going to be able to feature in the #Tetent Timespy [gd0136] or #Tetent Tiny [gd0040], as well as an uncomfortable thumb button placement on Tetent (if the motor is included on that too) but all hope may not be lost. My assumption yesterday was that the belt was going to be in the centre of the available area, but I'm thinking that I could get a shorter solution if I move the belt to the side. As long as there's 20mm of space between belts, there's no problem.
Looking at the SmartKnob
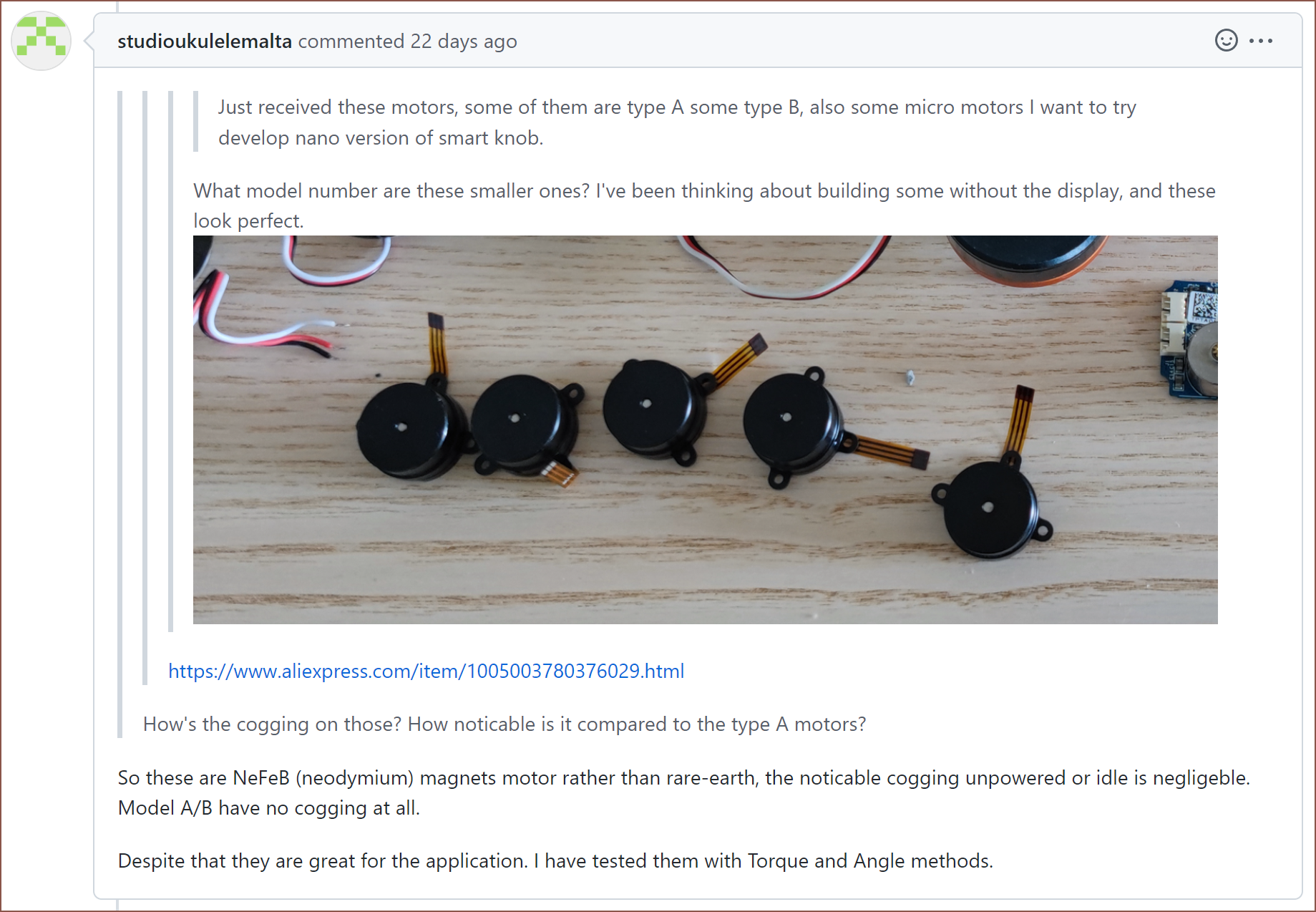
The first project that I saw that used motors is this one and it gave me the idea to restart my #Situation SeriouS [gd0098] project. I looked on the github and found out that they've been having issues tracking down a new motor. One of the motos that shows promise is this 3205 Type A, so I'll keep that in mind for gd0098. Anyway, the reason why I mentioned this project is because I saw this:
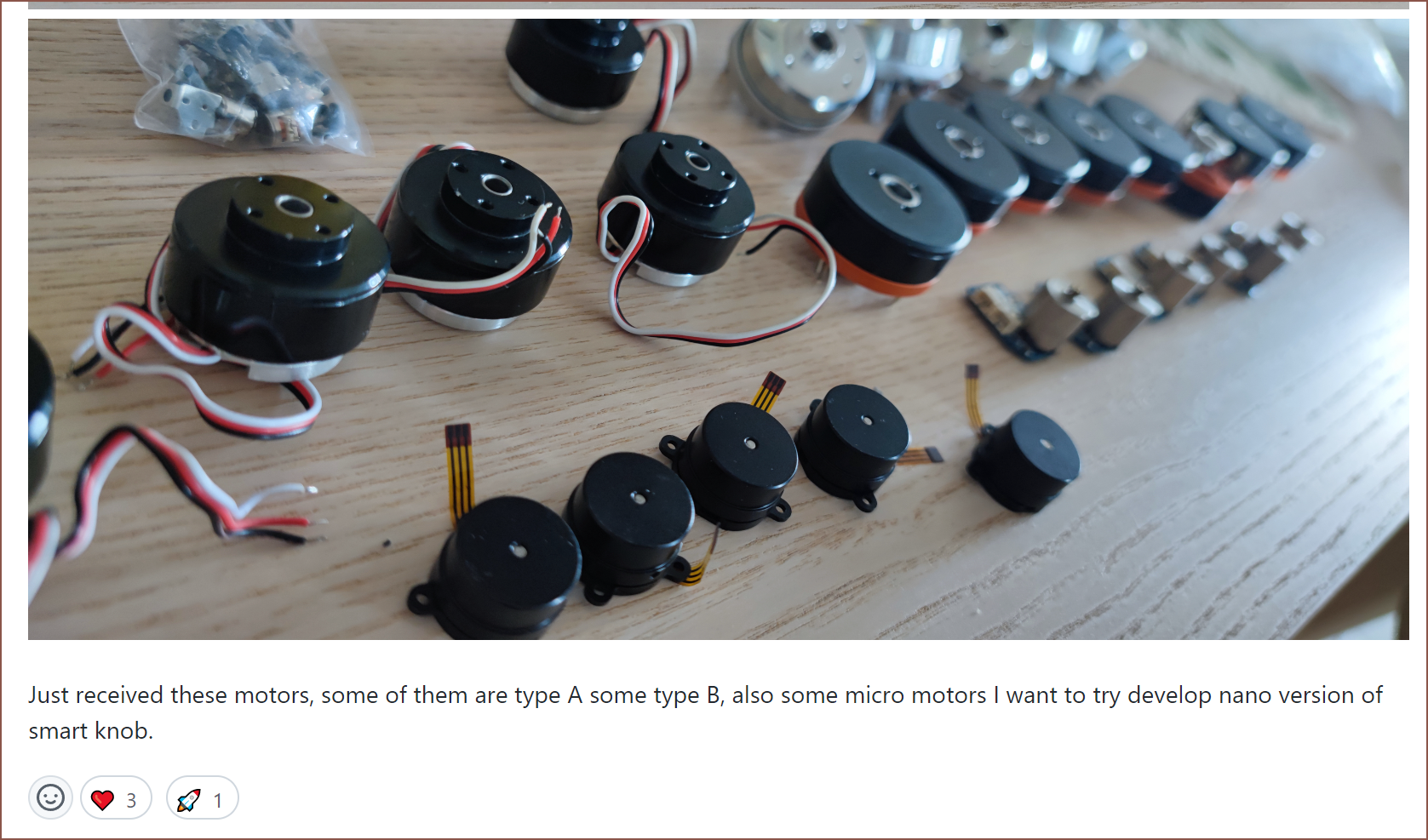 And I was like "hey aren't those..."--
And I was like "hey aren't those..."--
New Concept
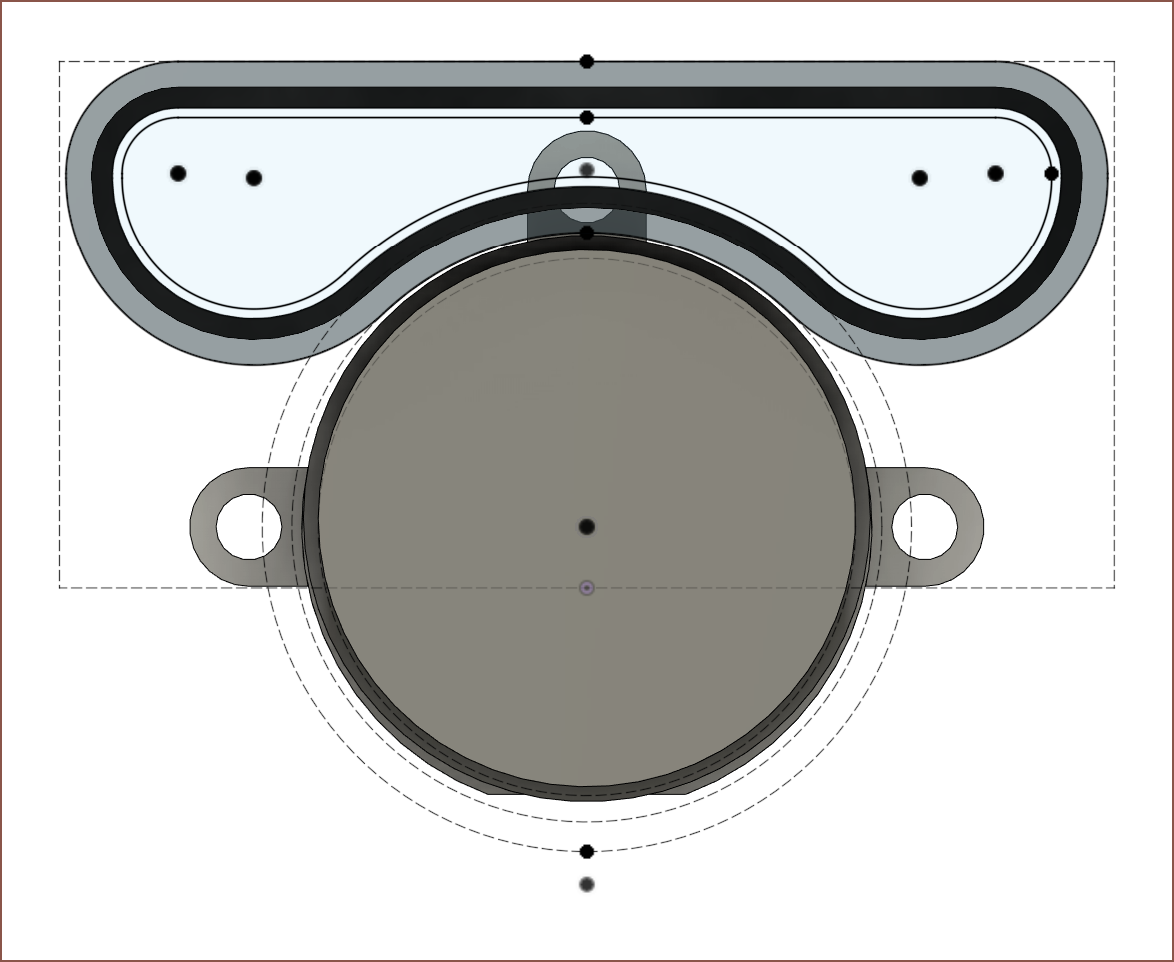
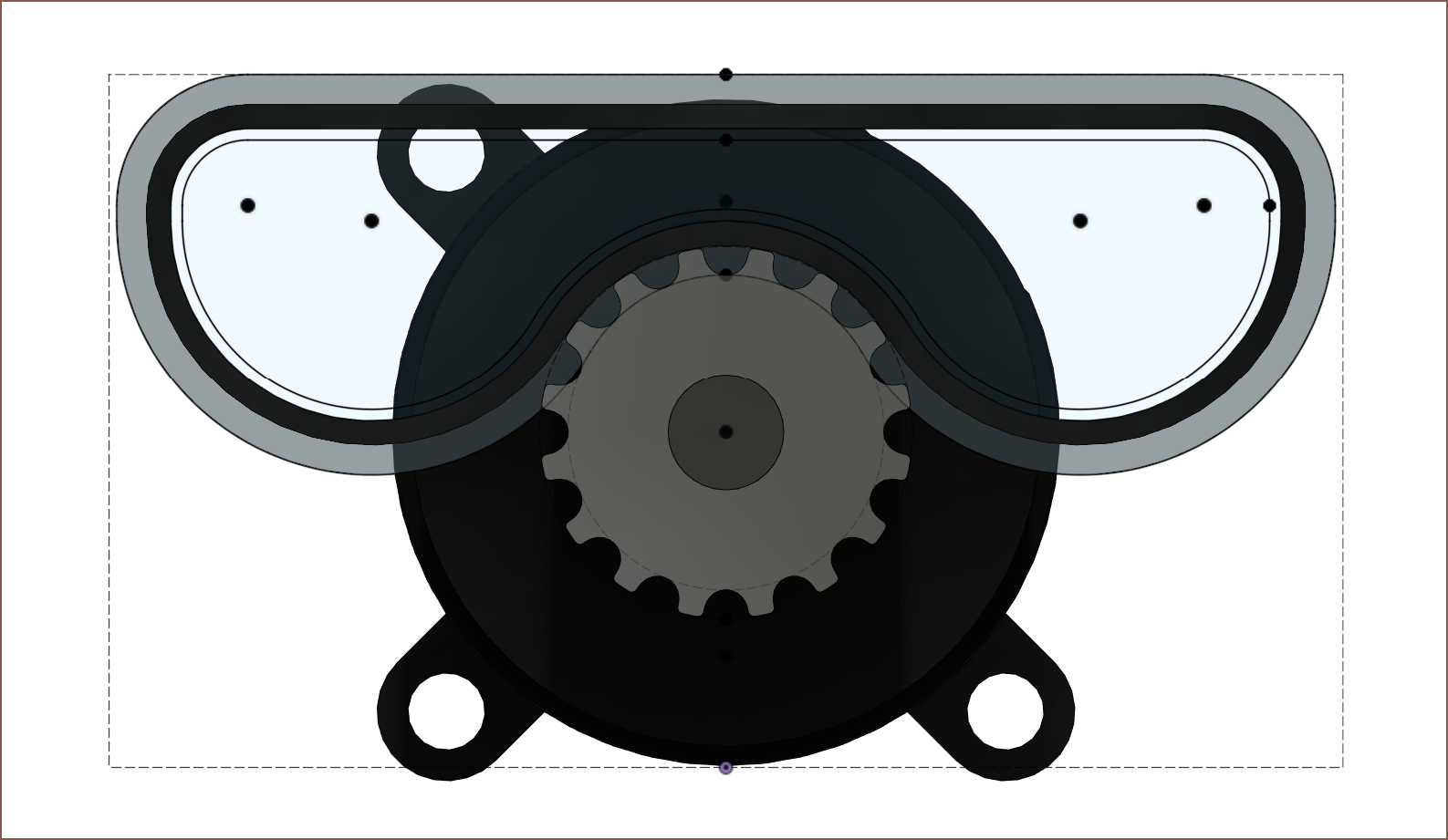 It seems that I could get... this run. The pulley is 16T and the dotted box is 32x18mm. Since one of the mounting holes is sticking past the height of the solid part of the belt, the motor might have to move down. I hope the fingertips curve fast enough for it to be a non-issue. I'm not sure how hard it would be to cut off the middle mounting hole, but I doubt the height of the key would reduce enough to bother trying.
It seems that I could get... this run. The pulley is 16T and the dotted box is 32x18mm. Since one of the mounting holes is sticking past the height of the solid part of the belt, the motor might have to move down. I hope the fingertips curve fast enough for it to be a non-issue. I'm not sure how hard it would be to cut off the middle mounting hole, but I doubt the height of the key would reduce enough to bother trying.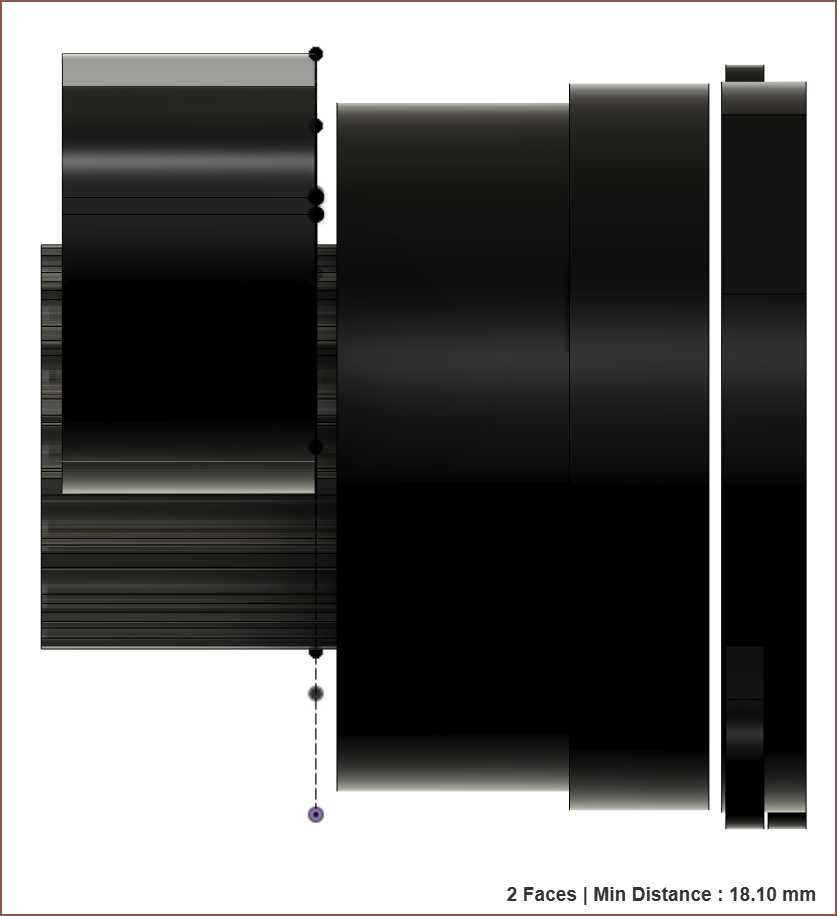 There's not much width space left with this method though. Fitting in the encoder might be difficult. Ideally, I can get a respectable 32x20x20mm size.
There's not much width space left with this method though. Fitting in the encoder might be difficult. Ideally, I can get a respectable 32x20x20mm size.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.