kelvinA
kelvinAMedia
Inspiration and/or examples of working principle
Navigation
The title tag system is explained here, and the table is updated when a change occurs. Notable logs have bold L# text.
Preface
[2024 - Jan 14]
This project idea started in the first week of 2020 after YouTube recommended me a lot of Portal content, and I was imagining what it would look like if there was a consumer model of the approx 1 x 1 metre, 7 axis Aperture Science panels that was simpler, smaller and cheaper. Those 3 aforementioned adjectives are not really Aperture's style, so I was imagining how different brands would design it, similar to how laptops or fridges from different brands look different.
In terms of practicality, this project scores low. However, in terms of personal morale (basically company morale but I'm the only one in the company), it's very high.
This is supposed to be a long term project that is sufficiently large and cool enough to prevent any other random projects from cropping up, as well as making sure I'm thinking of the future when I'm working through the projects of today. For my LED animaition projects, the basic idea of scale is:

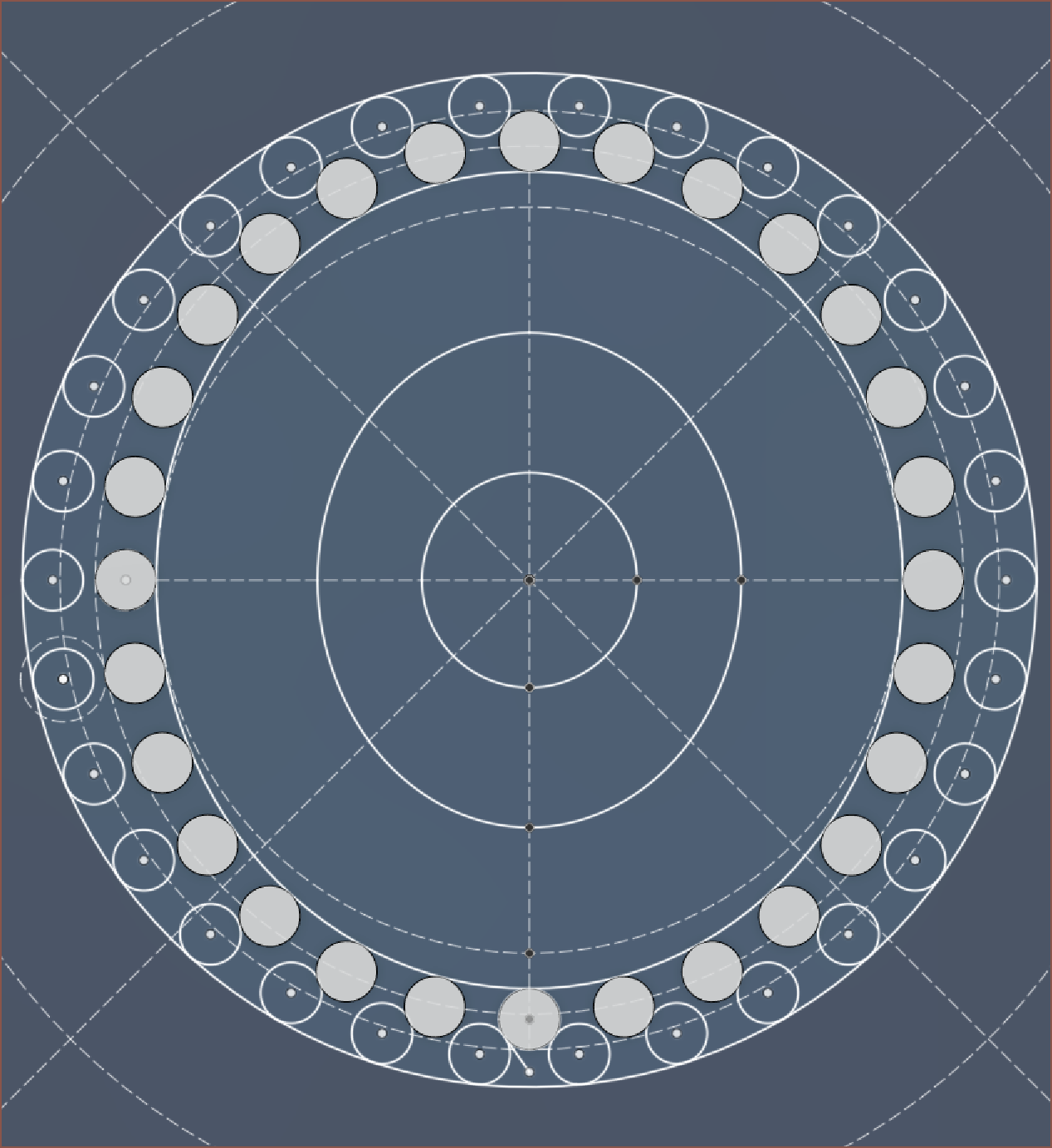
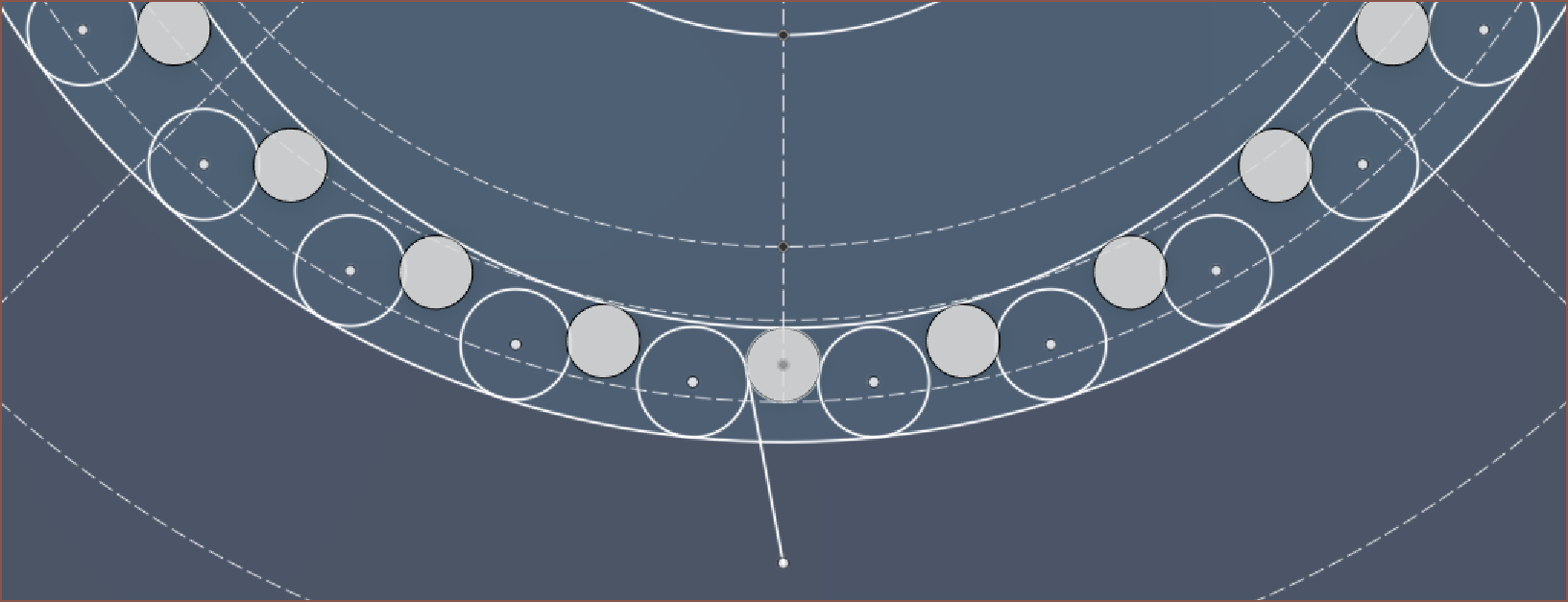


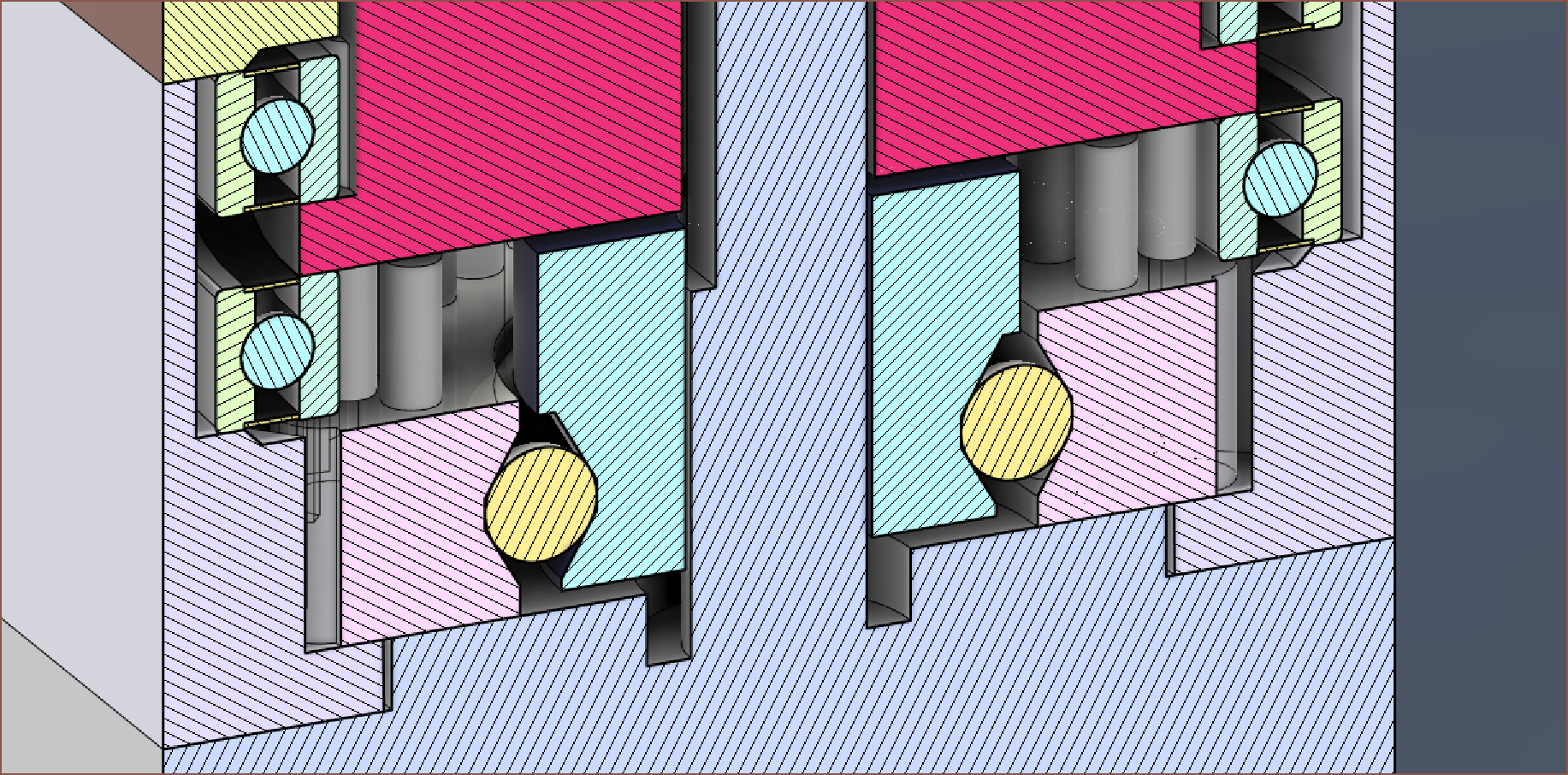
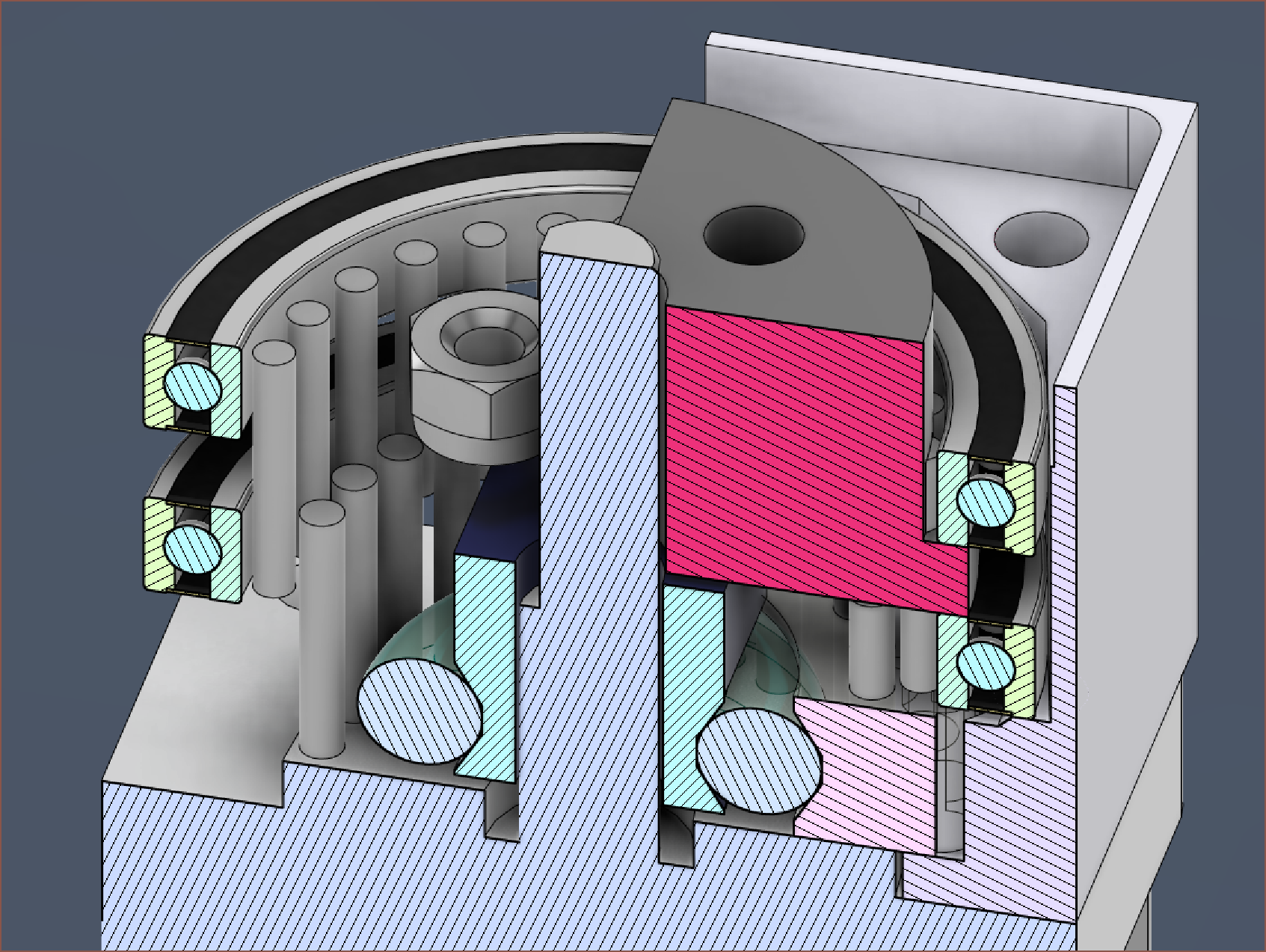
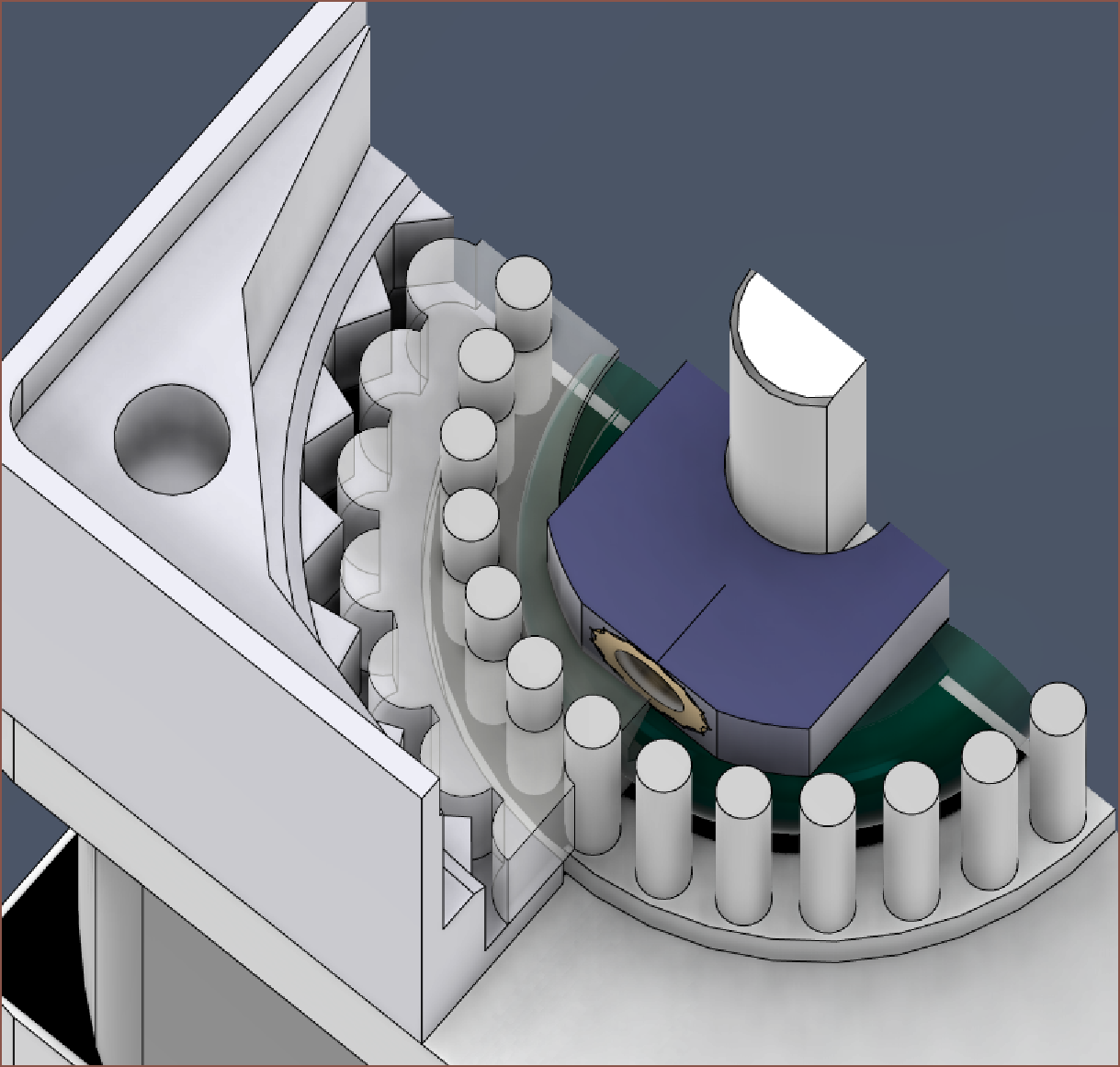
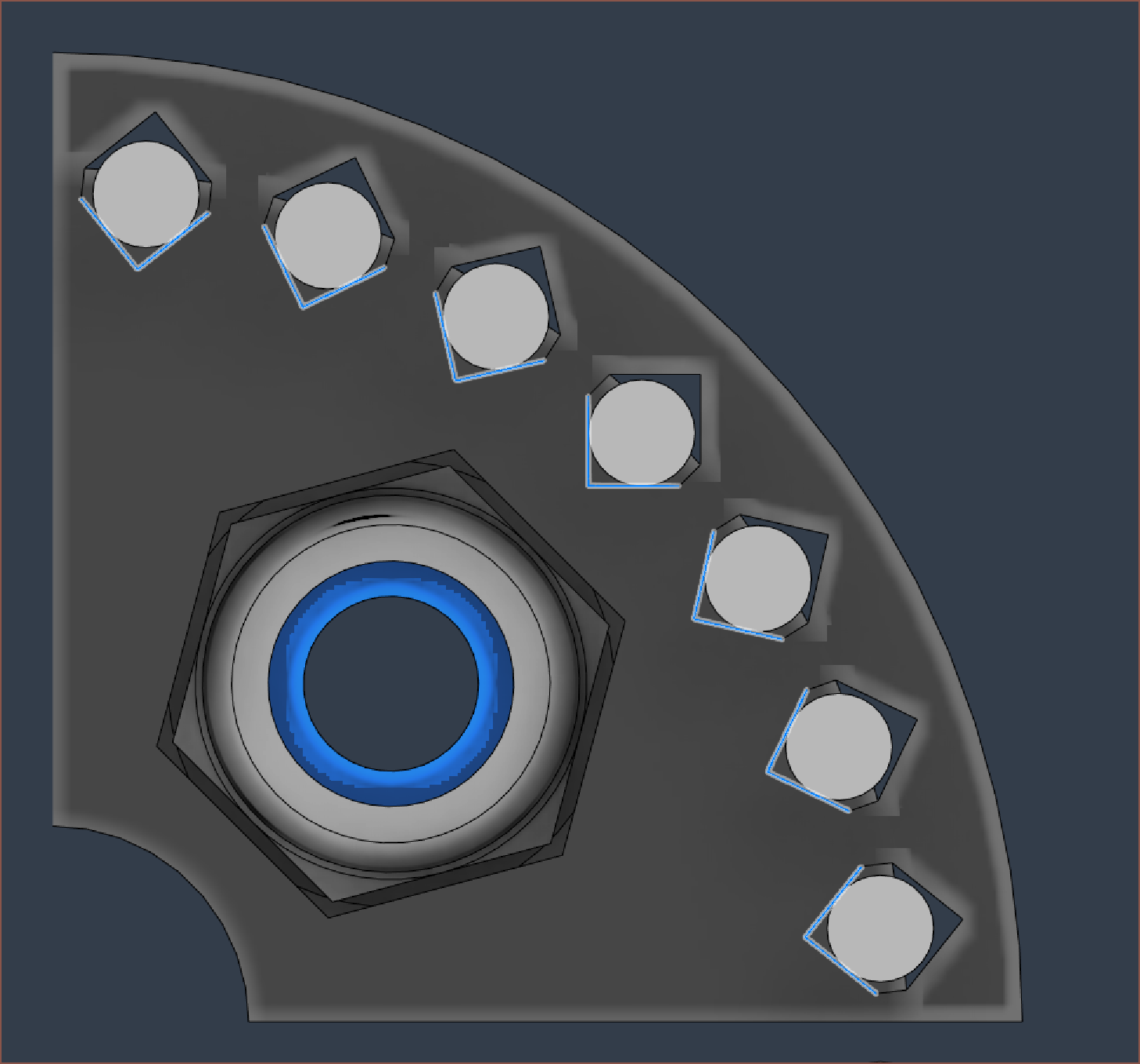
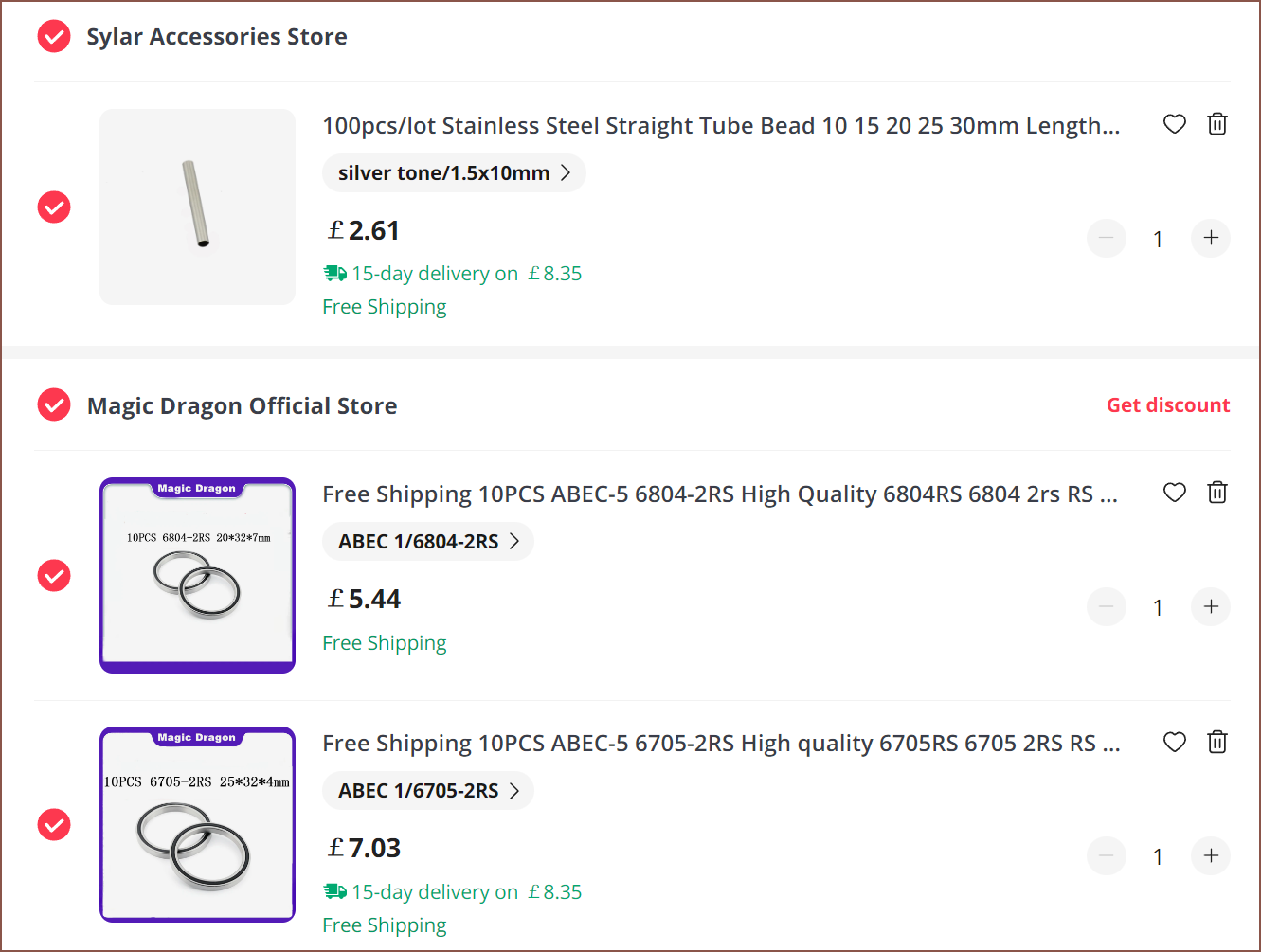
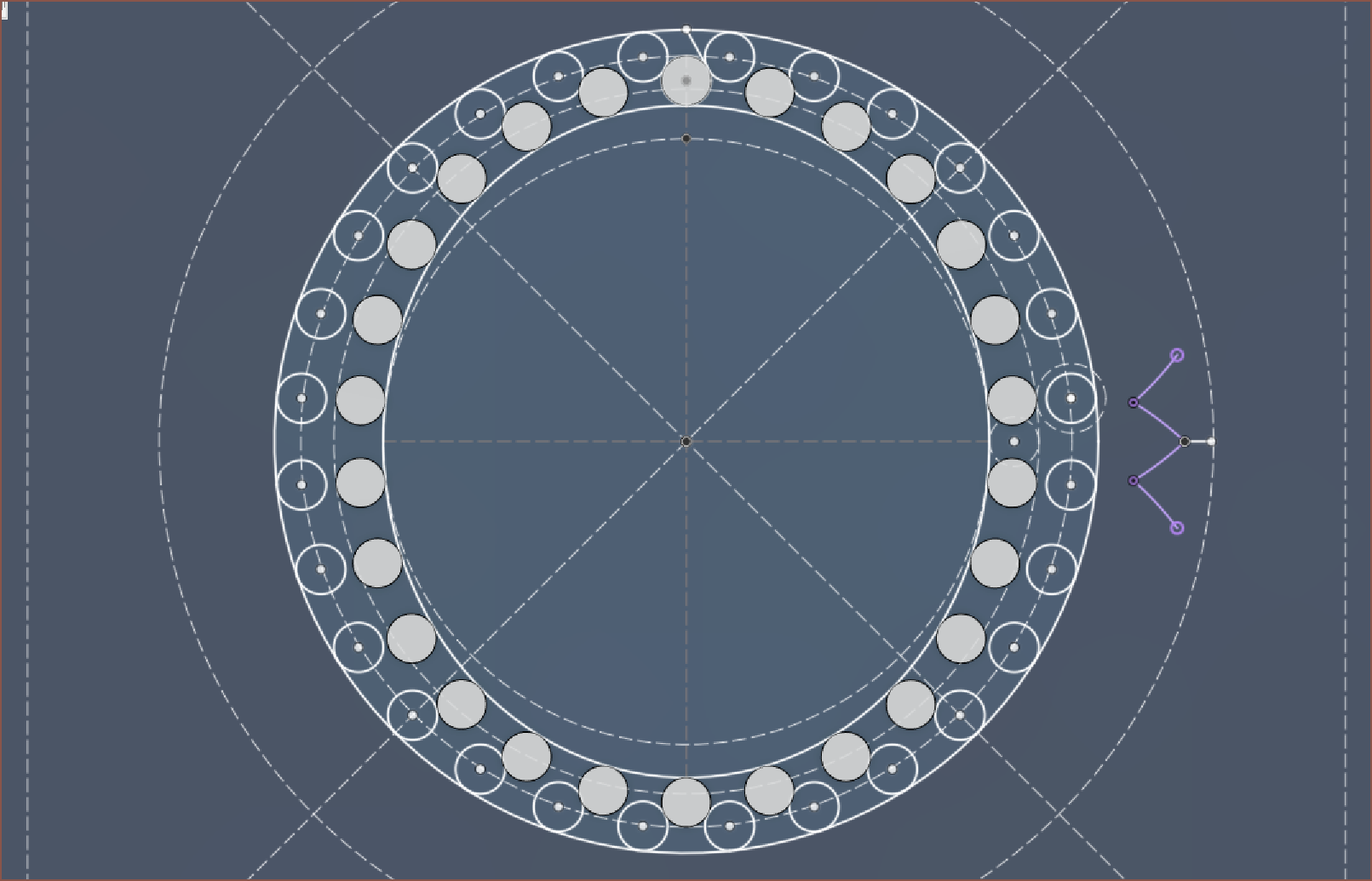
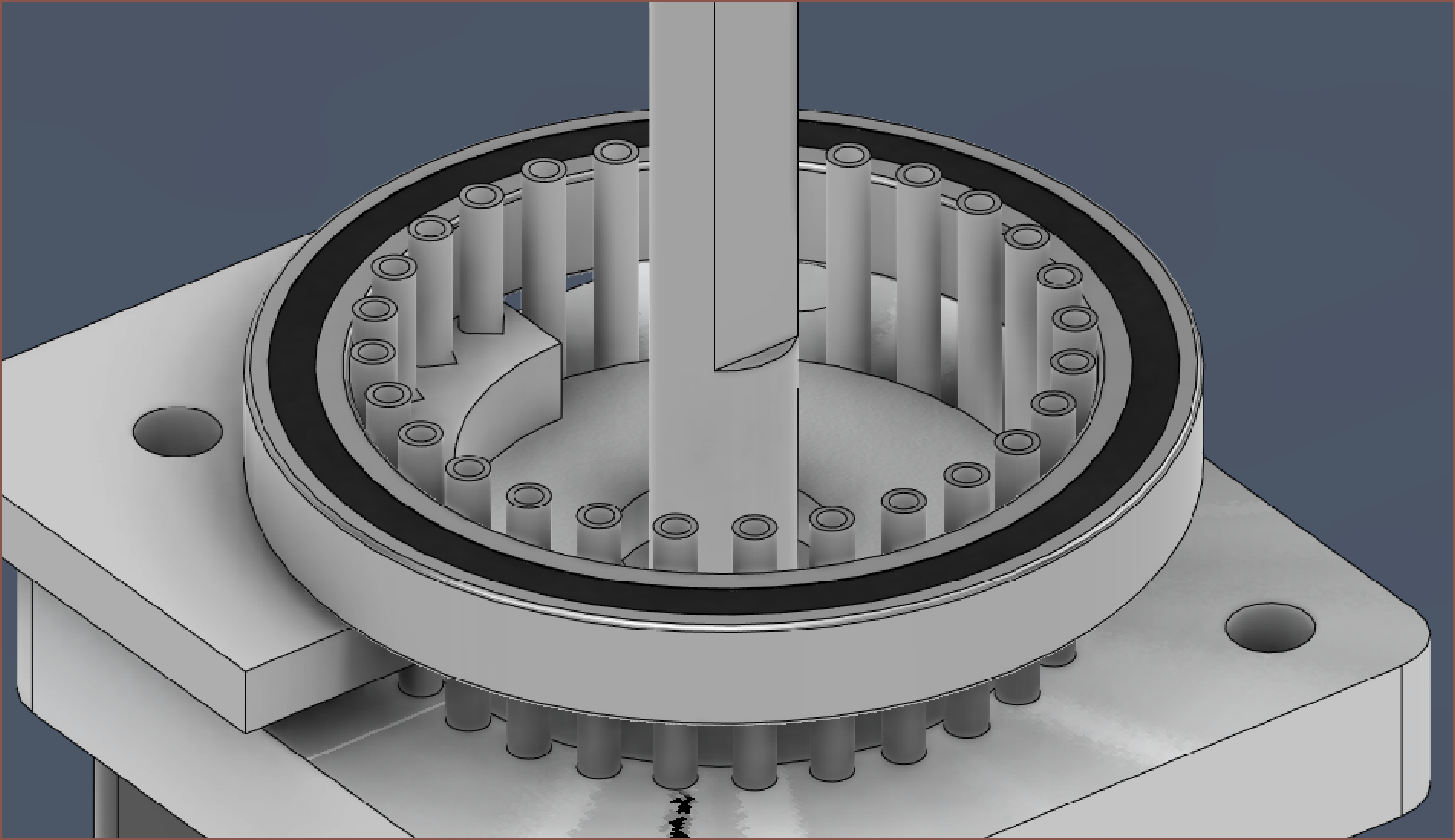
 Speaking of 4, I think I'm going to pass on the cage and instead use 12 balls. The difference would be 3p, and I'd expect that a 3D printed cage would cost more. Additionally, more balls means that the loads exerted on the wave generator are more distributed and would better imprint the eliptical shape onto the flexspline.
Speaking of 4, I think I'm going to pass on the cage and instead use 12 balls. The difference would be 3p, and I'd expect that a 3D printed cage would cost more. Additionally, more balls means that the loads exerted on the wave generator are more distributed and would better imprint the eliptical shape onto the flexspline.