0%
0%
World’s first camera stabilized self balance robot
Using your phone’s camera and IMU to position stabilize a self balance robot – no additional sensors needed
 SerialSensor
SerialSensorBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Alexander Kirillov
Alexander Kirillov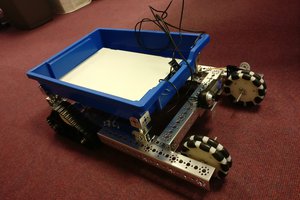
 SiliconSloth
SiliconSloth

 codersilver
codersilver
For specifically this application latency is everything. You already have a ton of delays until you get the latest data from the internal sensors. Espcially the camera of various phones I've seen 40-100ms latency. So you are already on the edge, since the system is unstable. Therefore you cannot allow additonally high latency, which I would expect the data transmission via screen blinking would introduce.
Do you have some numbers here?