 pat92fr
pat92fr-
1Build instructions in video
-
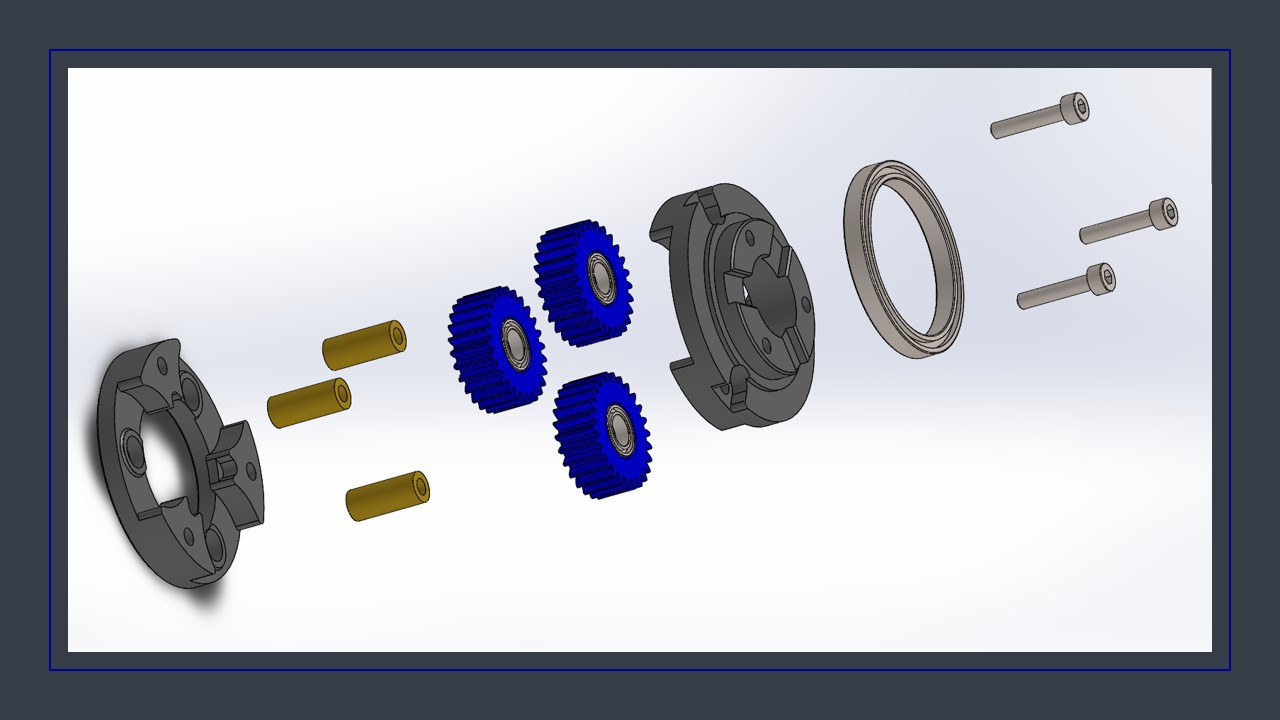
2Build instructions in pictures
See. Instructions v0.01.pdf in file section.
![]()
![]()
Felin Quadruped
A small 12-DoF printable legged robot using quasi-direct drive brushless actuators
A small 12-DoF printable legged robot using quasi-direct drive brushless actuators
See. Instructions v0.01.pdf in file section.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.