I've been going to college to get my mechatronics degree and haven't devoted any time to this project. It is however, forefront in my mind. I have gained a lot of new knowledge of basics: designing a PCB, having the PCB manufactured, build the PCB, new soldering techniques, testing and use of said PCB. I am currently taking classes for AutoCAD and Solidworks, and they have helped immensely. I taught myself Fusion 360 for the purpose of designing my pcbs and ill keep using Fusion 360 to make future PCBs. I think I have a better understanding of what I what to do, what I can do and what I still need to learn.
I want to design a PCB that takes the 5 wires of the "toy servo" and convert it to standard servo wiring with motor drivers, a comparator and whatever else it needs for each motor so that it can be plugged into a servo controller hat for the Raspberry pi 4. I just need to know what ICs ill need to get for all of that and jump into fusion and design the PCB. I dont know if anyone is gonna even read this but if anyone has suggestions on what i would need, feel free to shout it out.
I will be taking up this project again as now we have a new home. I am in the progress of putting together my office again and have found all relevant parts in various boxes and have put them in one place. Videos and pictures are coming soon…. As soon as i make them
I plan on using donor hobby servo controller PCBs to convert the "dumb" toy servo motors into proper hobby servos so that I can plug them easily into a Pi hat that can control up to 16 servos and have complete control.
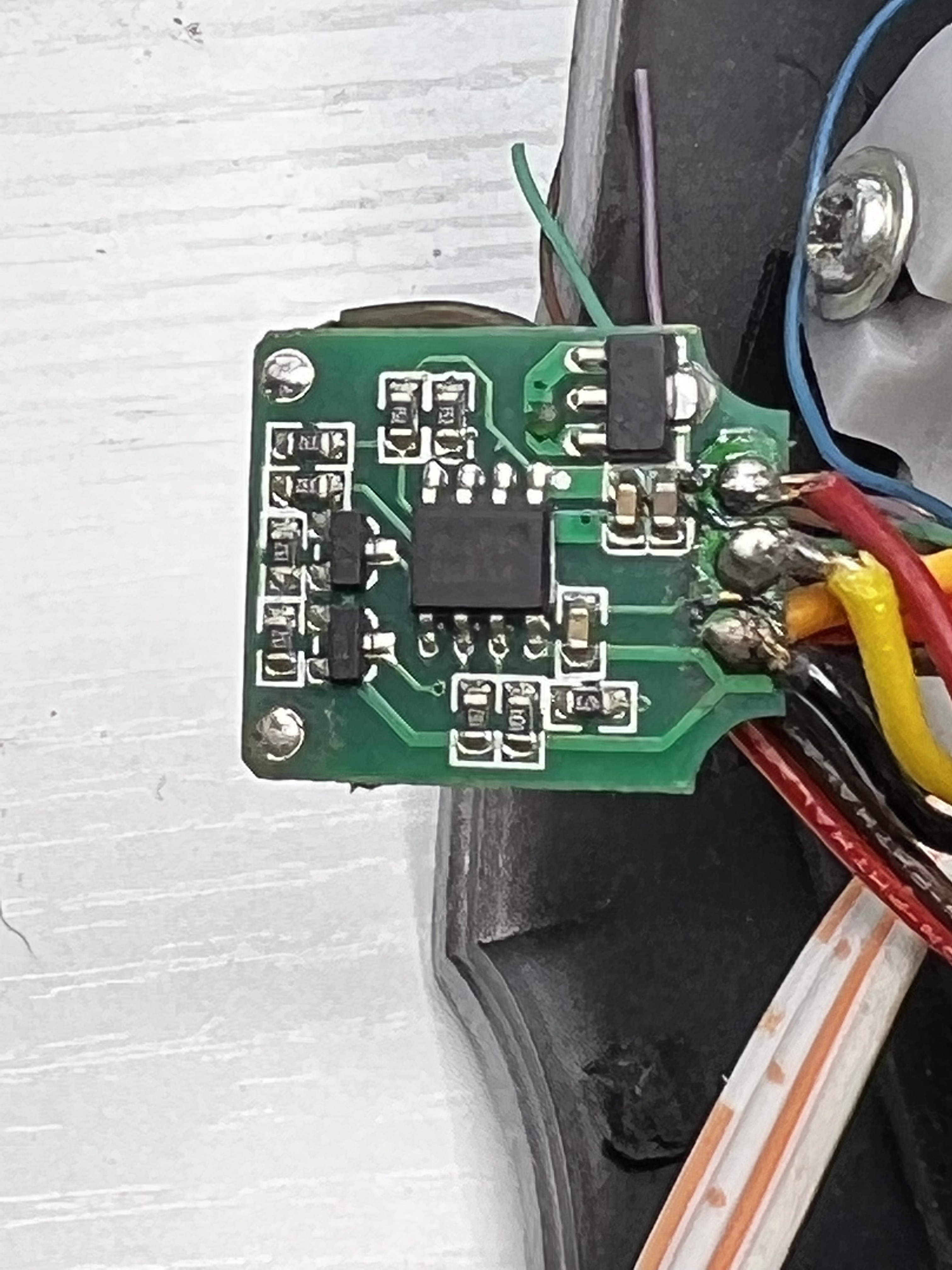
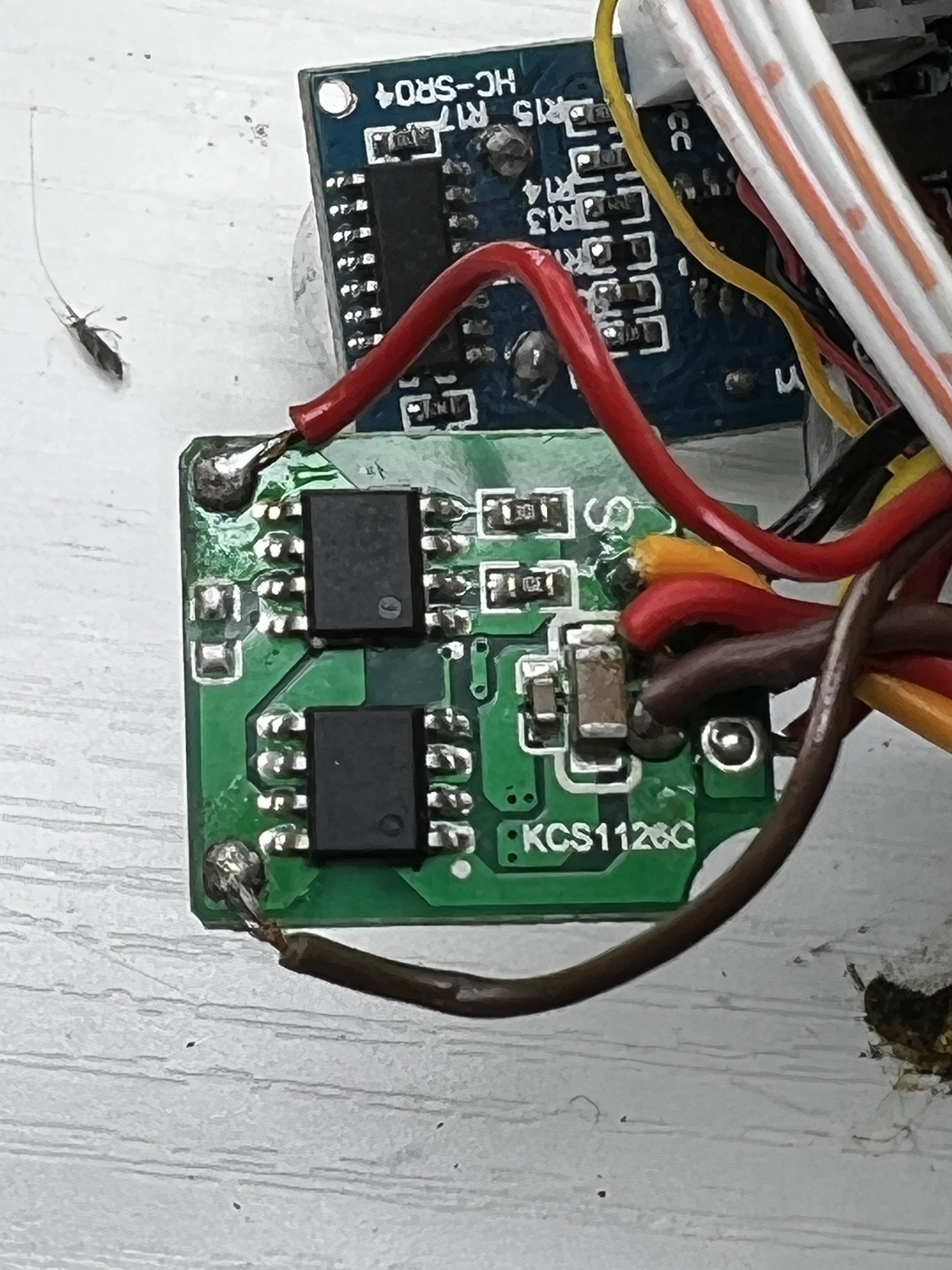
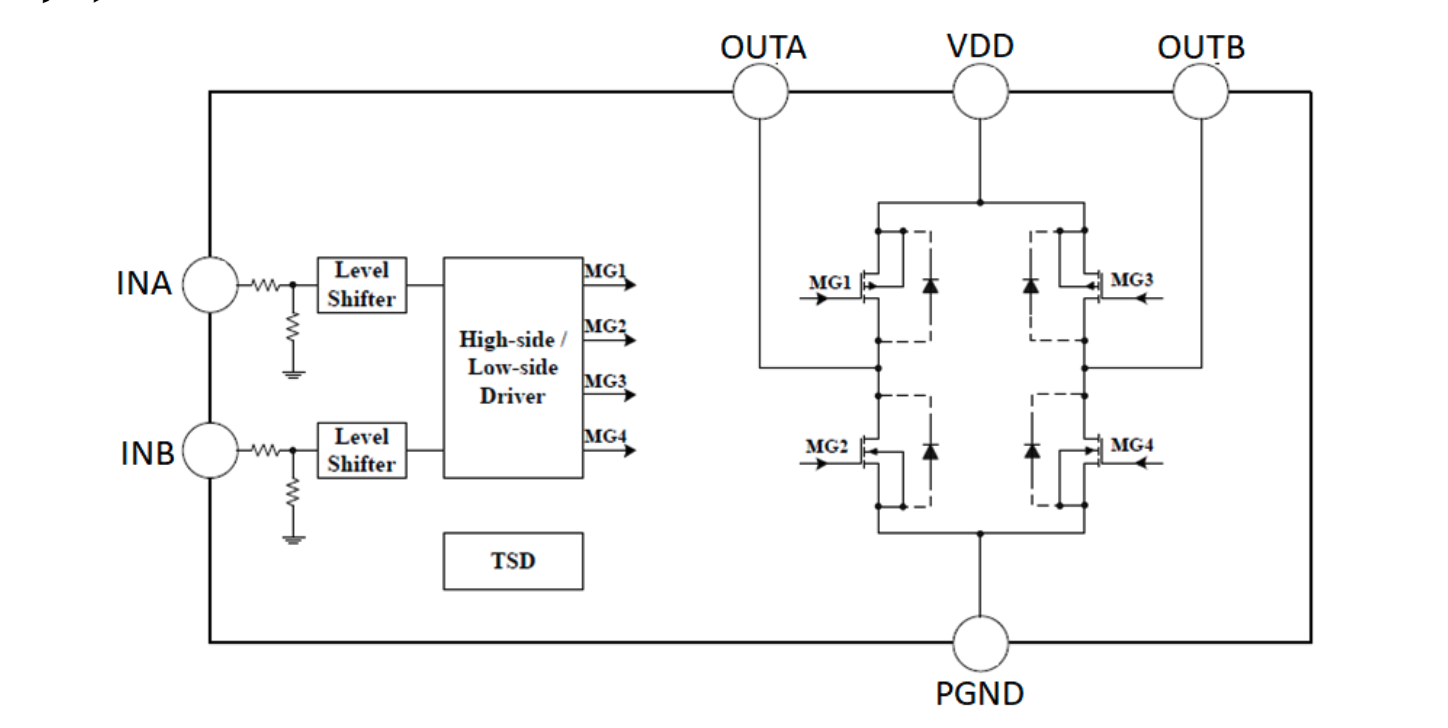
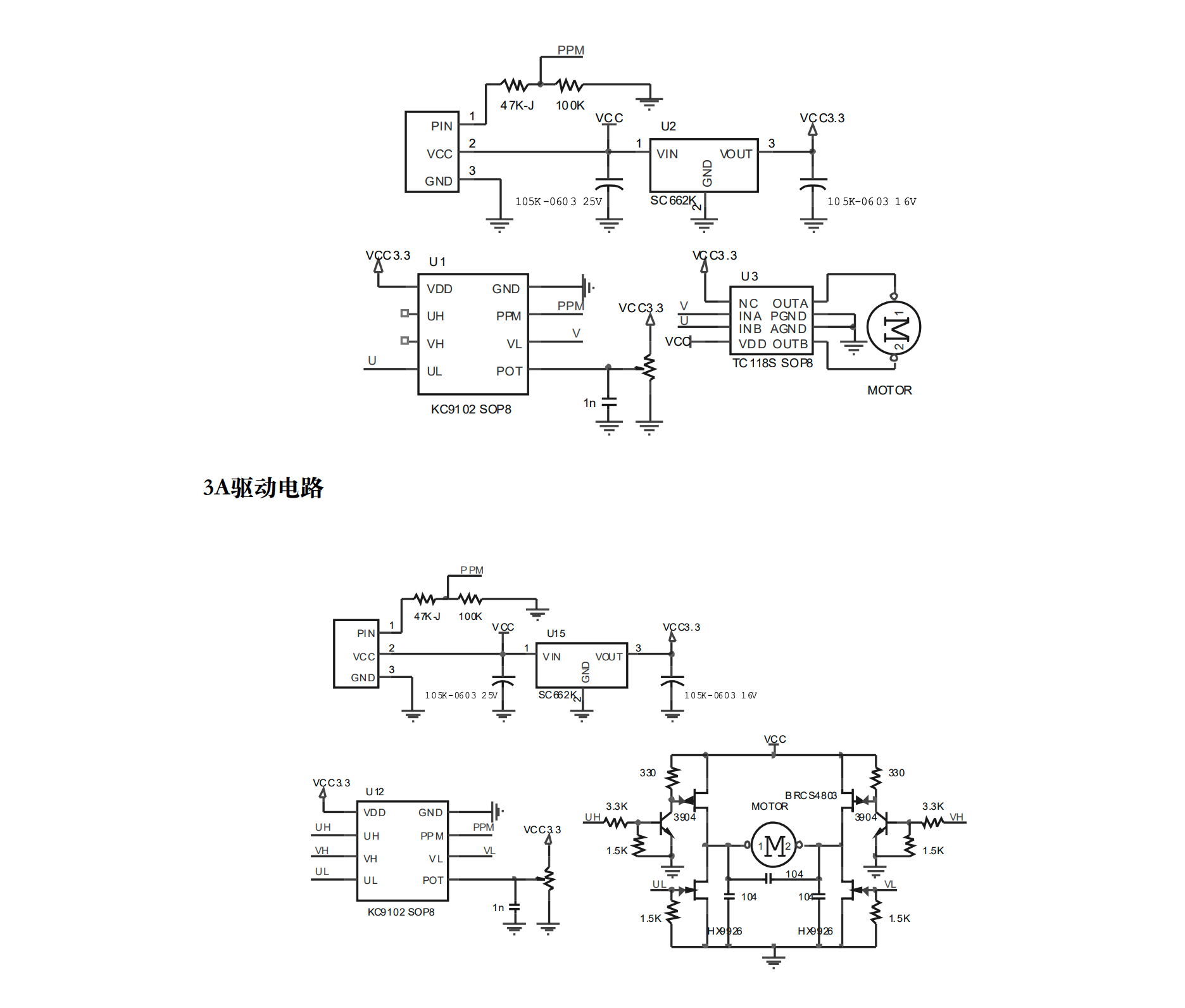
But the thought of using perfectly good servos like this makes me cringe. So i found what driver chips are on one of the already donated servo PCBs, the data sheet and the schematic for almost the entire circuit!
I believe a more competent person than I can help me design a custom PCB with these chips so that I can use it instead of tearing apart perfectly good hobby servos.
If anyone reading this is interested in joining me to help out designing a custom servo driver board like the one I took out of a hobby servo,
DO NOT HESITATE TO CONTACT ME!!!! PLEASE HELP ME OUT!!!!!
I also need help identifying the other components, well atleast the values ill need because i know theres a lot of resistors. I just do not know enough yet to identify the other components, so if you wanna chime in, feel free!
I am a life long tinkerer. Growing up I have taken apart more things than I had fixed them. But it wasn't until the last 5 years, did I actually learn anything from my tear downs. I started out really getting into actually fixing things after tinkering with it when I got a 3D Printer 4 years ago. I learned how to upgrade my printers and now I just want the printer to work out of the box with minor upgrades. Im done tinkering with them. Now that I can competently design and print the parts i need for other projects, I learned that spending the money on good machines beats fooling around and tinkering with them instead of printing with them.
I also apparently have ADHD, and that makes being a tinkerer kind of a pain in the ass. I have LOTS of neato projects, but i don't have a lot of FINISHED projects. Also, I do not document much of anything. Its all up in my head and most of the time it's like a friggin Etch-A-Sketch. I get started, get distracted, and the slate is cleared. The project gets shelved, never to be completed. I decided to try to mitigate this idiotic process and start actually documenting what I'm doing. So that when I die, my wife has an idea of what I was doing so they can give it to my son and my son will have some kind of idea of how to finish it, if he so desires.
My first step to feeling like I am actually doing something instead of screwing around, is documenting it. Because as you all know, Adam Savage has stated that: "the only difference between Science and screwing around is writing it down."
So im writing it down. I'm done screwing around. (i repeat myself, its a thing)
Where I get my toys:
My friend Rich likes to go to the flea market, thrift stores and yard sales to buy interesting toys and machines for cheap. He brings me all the special pretties and i see what i can do with them. I have 3 Robosapiens, 2 Roboraptors, several toy RC cars, various animal robots etc. Usually all the RC stuff is missing the remote and if i cannot find a replacement, its pretty much open season for me to tear them apart.
The more recent finds have had internal LiPo batteries, sometimes USB charging, and even app support, like this bot. These are usually more than the usual DC motors and crappy controls of cheaper toys. These more expensive ones have potentiometers, rotary encoders, photo interrupters etc inside, in addition to the aforementioned LiPo batteries and other modern accoutrements. If the original PCB that runs the whole shebang is borked because the kid that owned it before spilled soda on it, at least the parts are still usable.
So I started to investigate how i could keep these neat but otherwise functionless toys running and have complete control of them. The advent of the Raspberry Pi and all the new hats that came with it, really opened the door for these useless toys.
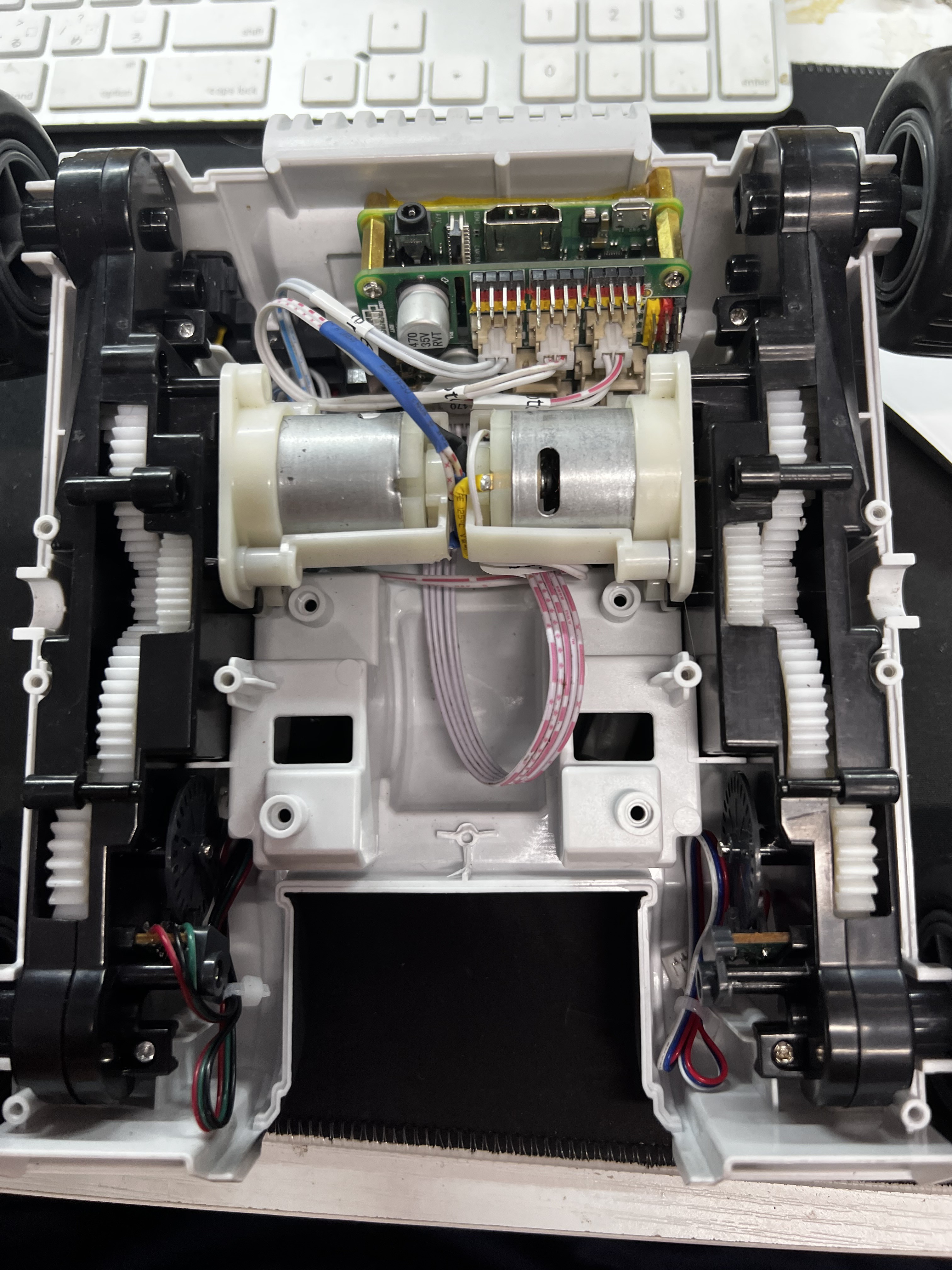
I had an epiphany while tearing down a Wowee quadbot! And it was something that i had overlooked and really didn't even give a second glance. And that was because I had no idea what i was looking at. While tearing down this toy, i saw the DC motor and this other component stuck to it. it was a potentiometer. I had just gotten into those Raspberry Pi driven, laser cut plexi, tank kits that had an arm driven by hobby servos, and had recently taken apart one of them that had never worked. Inside was a small DC motor, some gears, a PCB, and a potentiometer. I did some research and then it all made sense. Essentially, when a toy company builds these motorized toys they use common little DC motors, some plastic gears, slap a potentiometer on one end and then shoot all 5 wires down to the PCB where it does all the work. its cheaper than using the hobby servos we all use for various projects nowadays, but they both do the same thing.
It does make reusing these toys difficult if the main board comes in dead because you either want to see if its worth it to try and repair or replace the board or tear it apart completely for parts and toss them into a bin in your workshop, hoping that you will need a small motor or what have you in the future. (we all do it, its ok to admit it.)
Well I had been doing just that for sometime now and I was dangerously close to becoming a hoarder. But now that i knew what i was looking at, and for, I started seeing ways i could turn these toys into something more powerful. And trust me trying to retrofit a rectangular hobby servo into a toy that wasnt designed for it, really sucks. I would rather tear out the original PCB that ran it, take the 2 wires for the motor and the 3 wires for the potentiometer, solder them onto a servo driver board from a hobby servo, run the standard 3 wires to a servo hat for the Raspberry Pi and bobs your uncle! You now have complete control of that motor like you would a regular hobby servo you bought on amazon.
I hope.
That is a theory of mine. I am going to test it by sacrificing the servo motors PCB, solder the motor and potentiometer wires from the toy to it and run the wires to the Pi.
I installed 2 WS2812 RGB LED light bars on the underside of the bot and filled in the holes for the line tracker so that they won't look like garbage anymore. Well, less like garbage anyway. But the stock wires for the LEDS were too short. I went ahead and ordered Mini Micro Sh 1.0mm Jst 3-Pin Connector with 150 mm cables to connect them to the hat. So tomorrow I will be terminating the bare ends with JST-XH and now that I am getting better at crimping, it will be a snap!
When the new bot arrives (whenever the hell that is) I will power it up externally and see if it connects to the app, if it does, then ill post a vid of it running stock. If it can run stock, Ill put it through its paces and see just what one could do with it before making the decision to mod it.
If it cannot connect to the app, then then i will mod this one as well, BUT I will not tear this thing apart all willy nilly, as i know now that the gripper and wrist needs to be taken apart carefully WITH PICTURES!!
I am still waiting on my donor servos but when they do arrive I'm going to leave all the stock wiring for the motors in the arm intact as to not have them get all over the place and convert them to hobby servos (5 wires, 2 for motor and 3 for potentiometers to standard 3 wire servo wiring) and that goes for all the wiring coming down through the arm. I don't need to take that apart completely, only enough to properly identify the wires for each motor/ potentiometer group conversion. all the servo driver boards will reside in the base
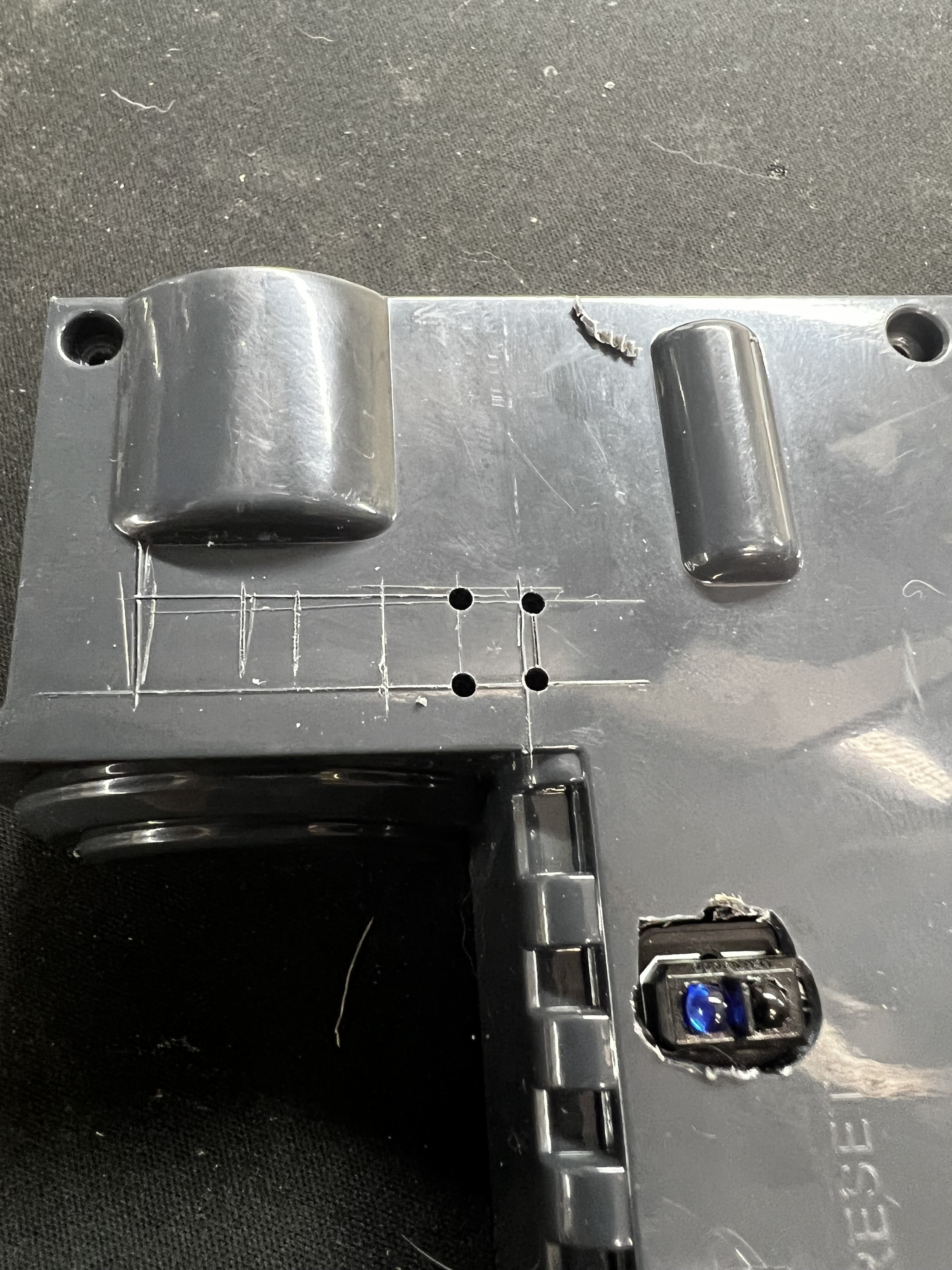
A do over for the holes for the line tracker. I filled them in with JB Weld SteelStik . I will file this down flush on the inside and re cut the holes so they are accurate and don't look like garbage.
Cut more accurate holes for the RGB LEDs, Peep the horrible holes for the line tracking
By using our website and services, you expressly agree to the placement of our performance, functionality, and advertising cookies.
Learn More
 Shawn Alfaro
Shawn Alfaro