See webpage for more details. Requires 141 words of program memory (282 bytes).
0%
0%
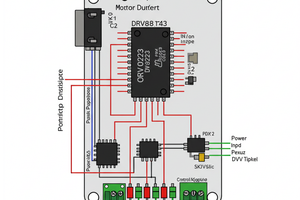
Control of a stepper motor with a voltage
An ATtiny13 measures a voltage and steps a stepper for- and backwards
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 electronicsworkshops
electronicsworkshops
 Lucy Fauth
Lucy Fauth
 sciencetoolbar
sciencetoolbar
That would only work if, prior to switching off, the stepper would have to be driven to position 0. That is what I did.
Or to store the last measured analogue voltage in an EEPROM position. Is that what you mean? As I used this machinery to adjust a high-voltage capacitor to the resonance position, I did not think about that yet.
brgs,
gerhard