0%
0%
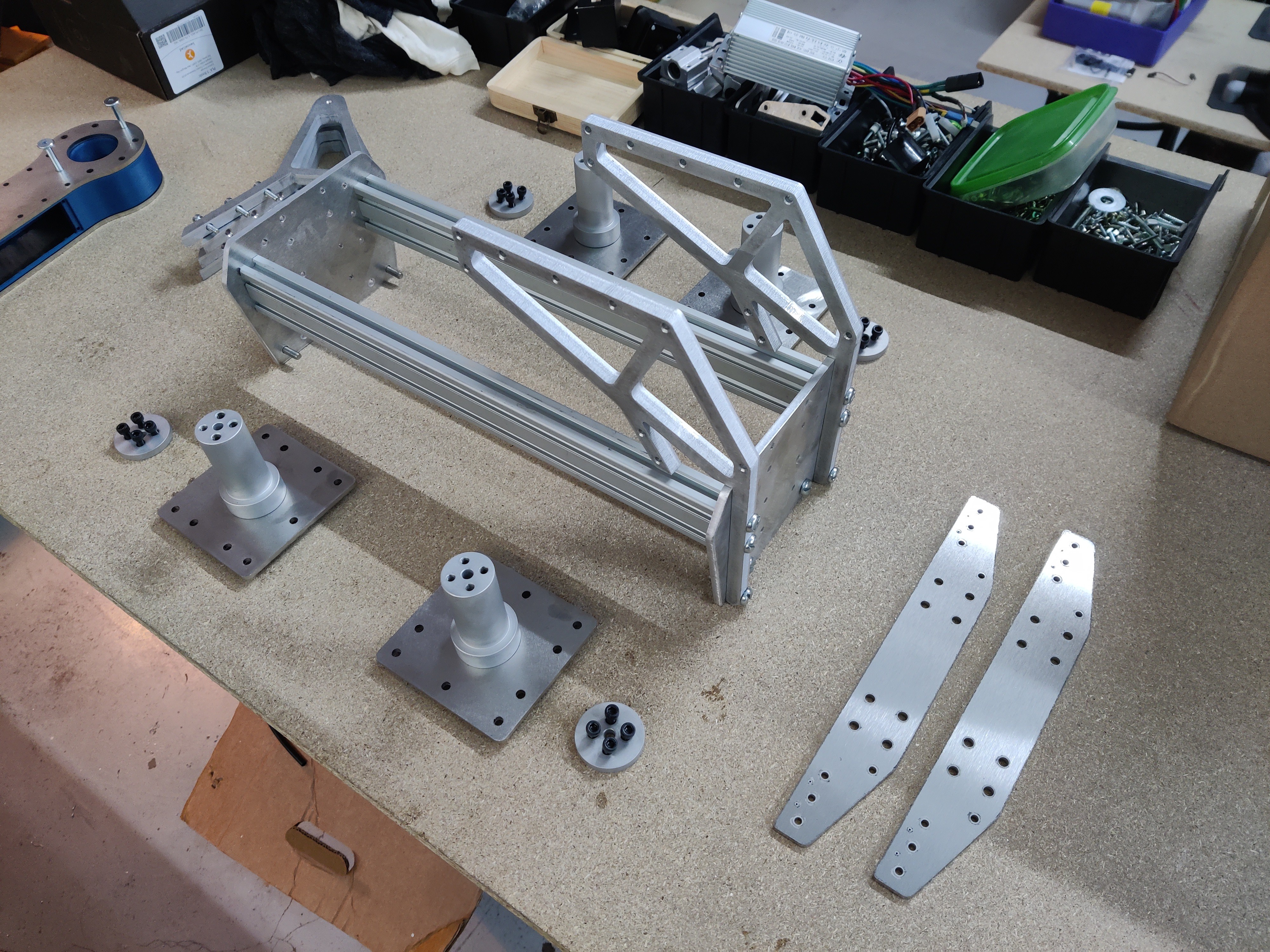
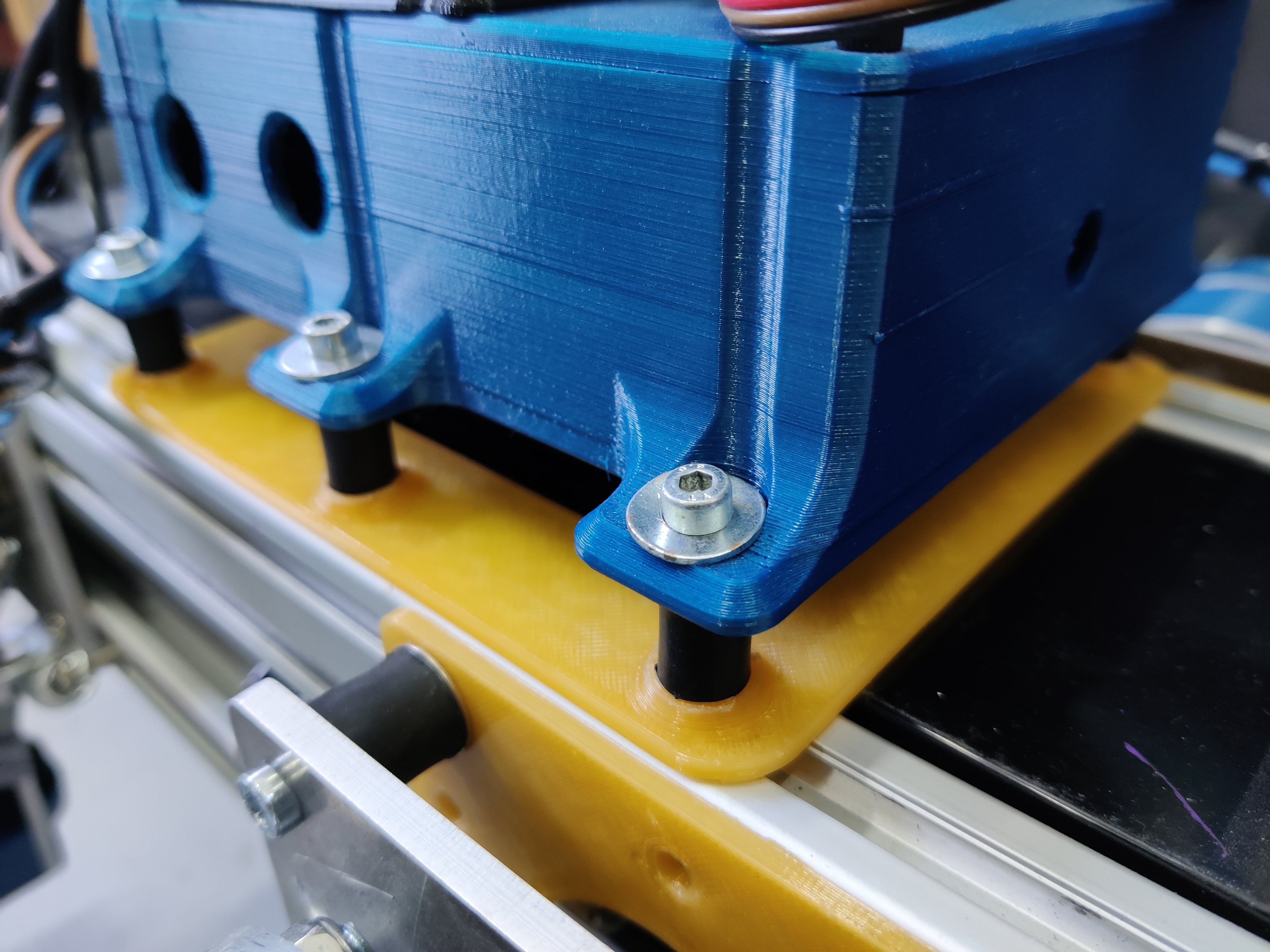
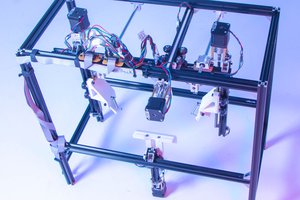
Not so small rover
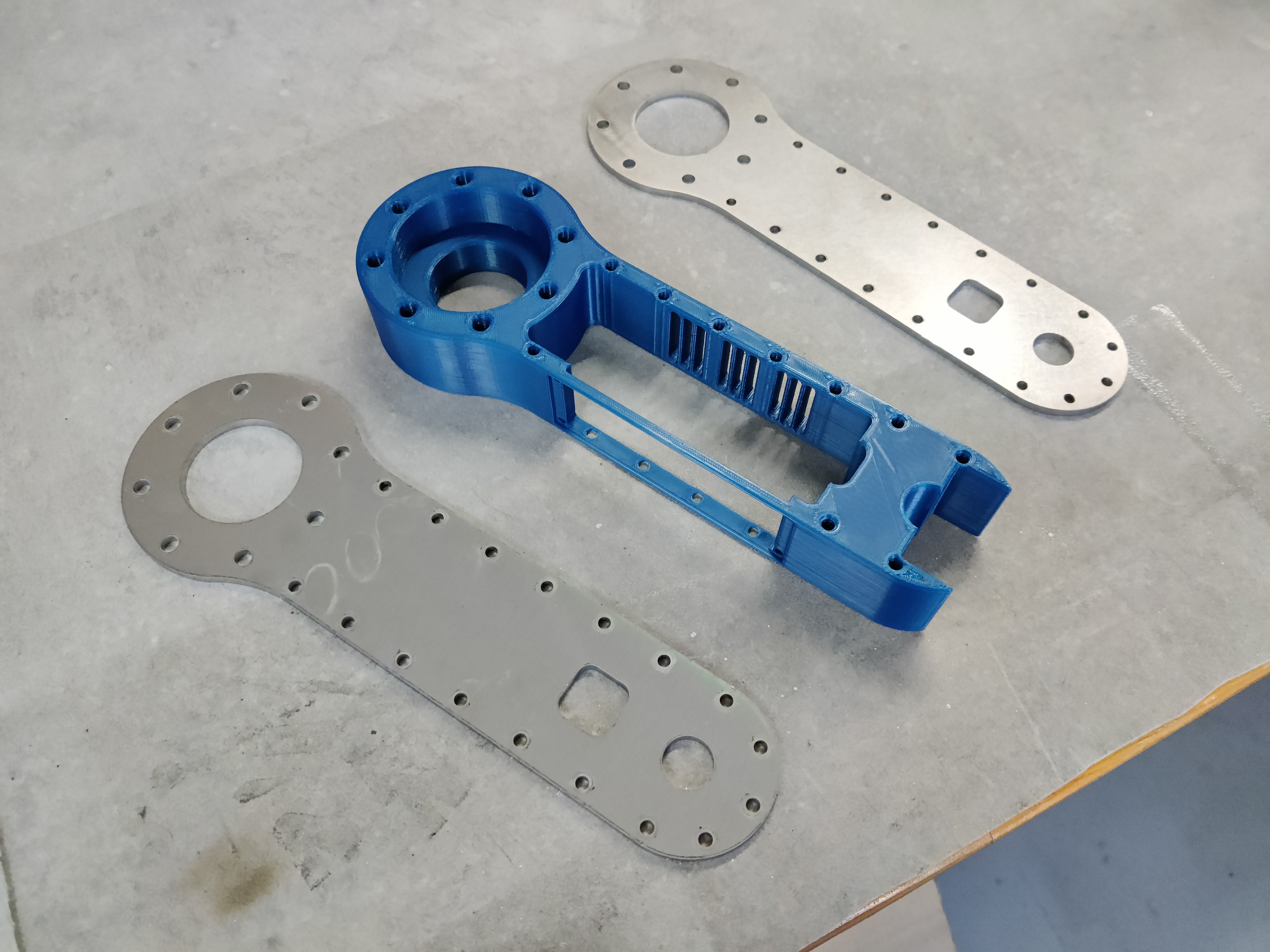
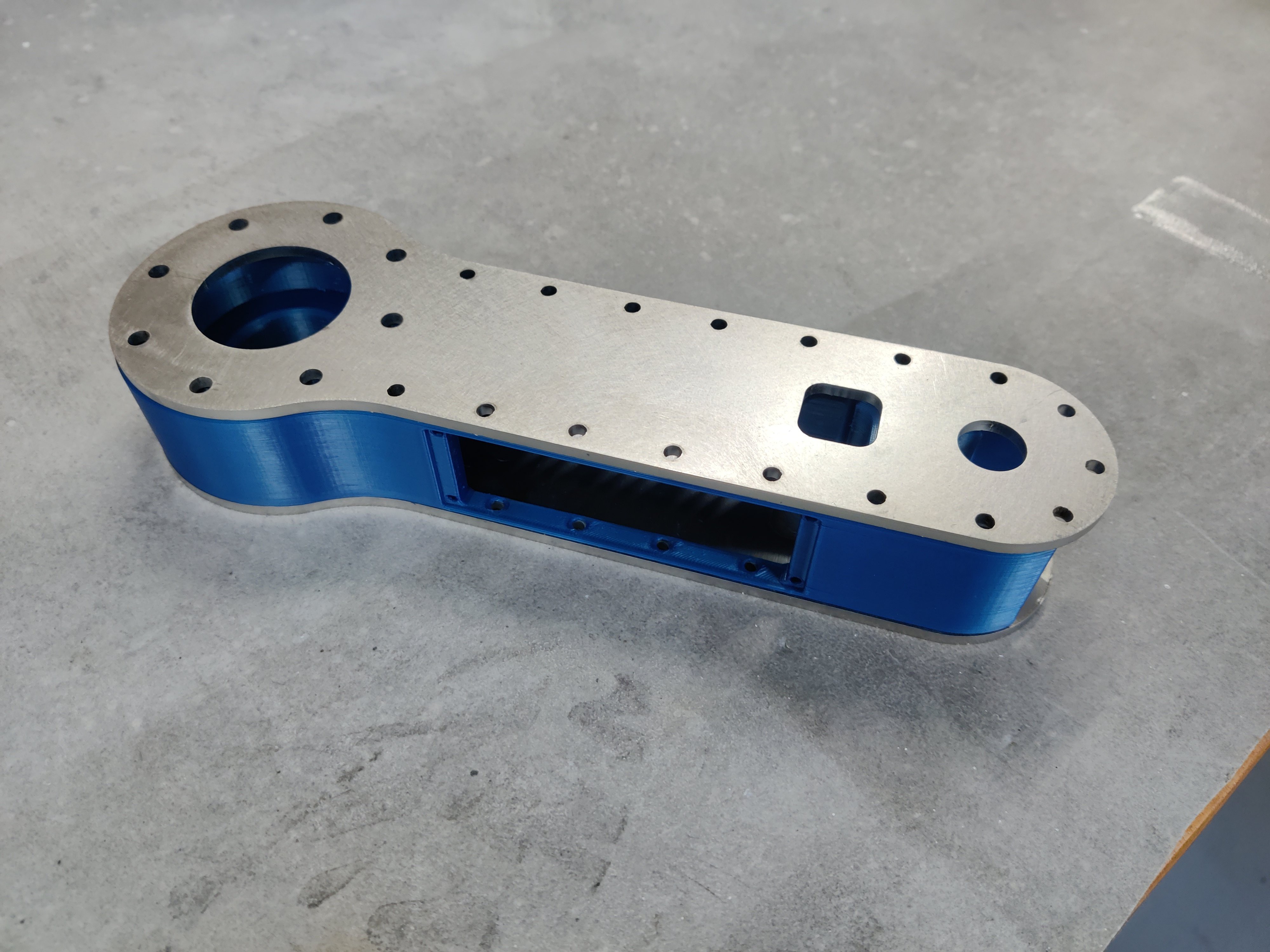
A robotic rover builds with spare part from hoverboards.
 Tanguy
TanguyBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests











 Fabian
Fabian
 Salvador Hurtado Alia
Salvador Hurtado Alia
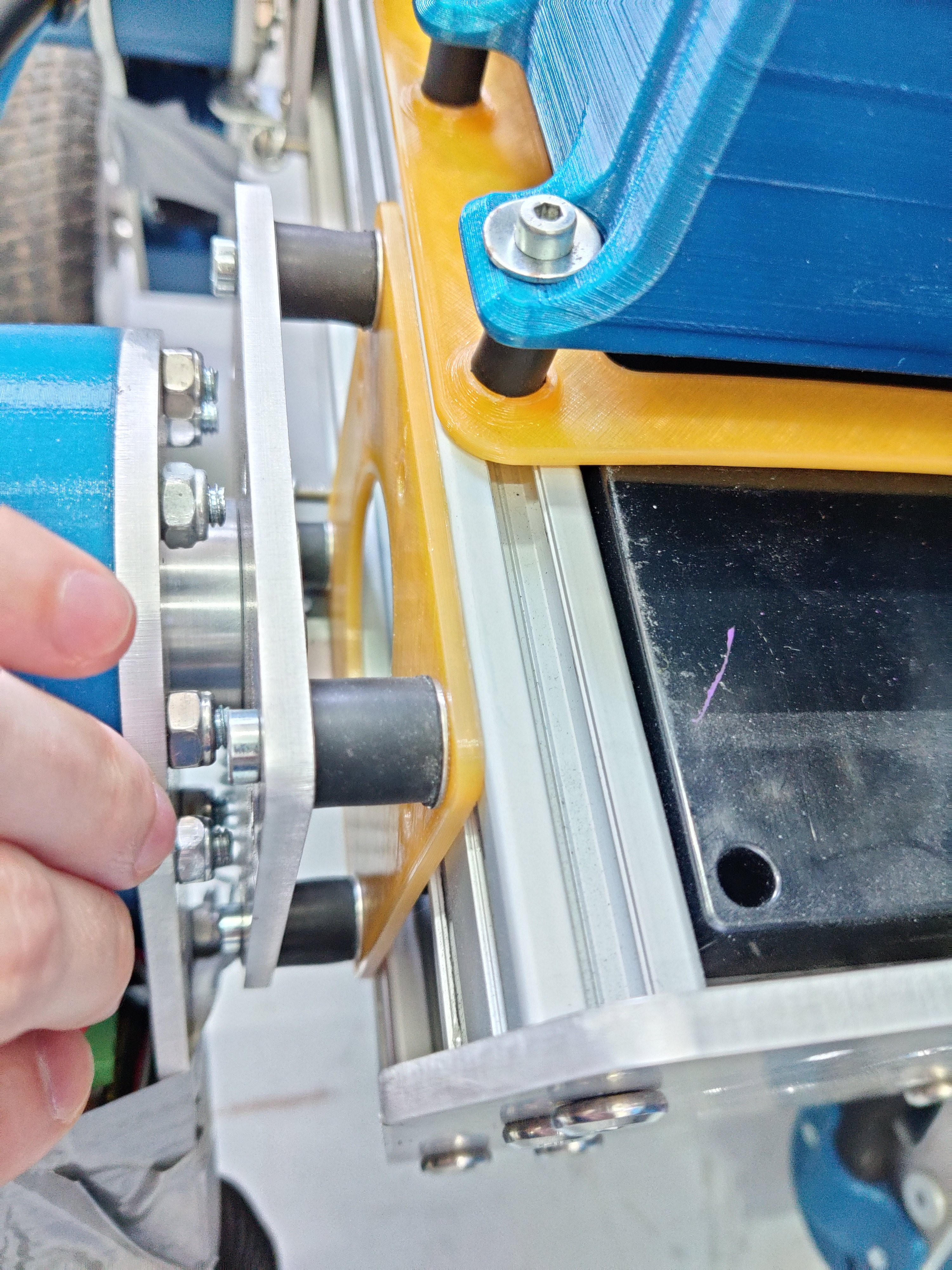
How do you get the wheel-speed?There is no encoder. The puls-output is not enough, I think.
And the direction of the wheels are not detected.