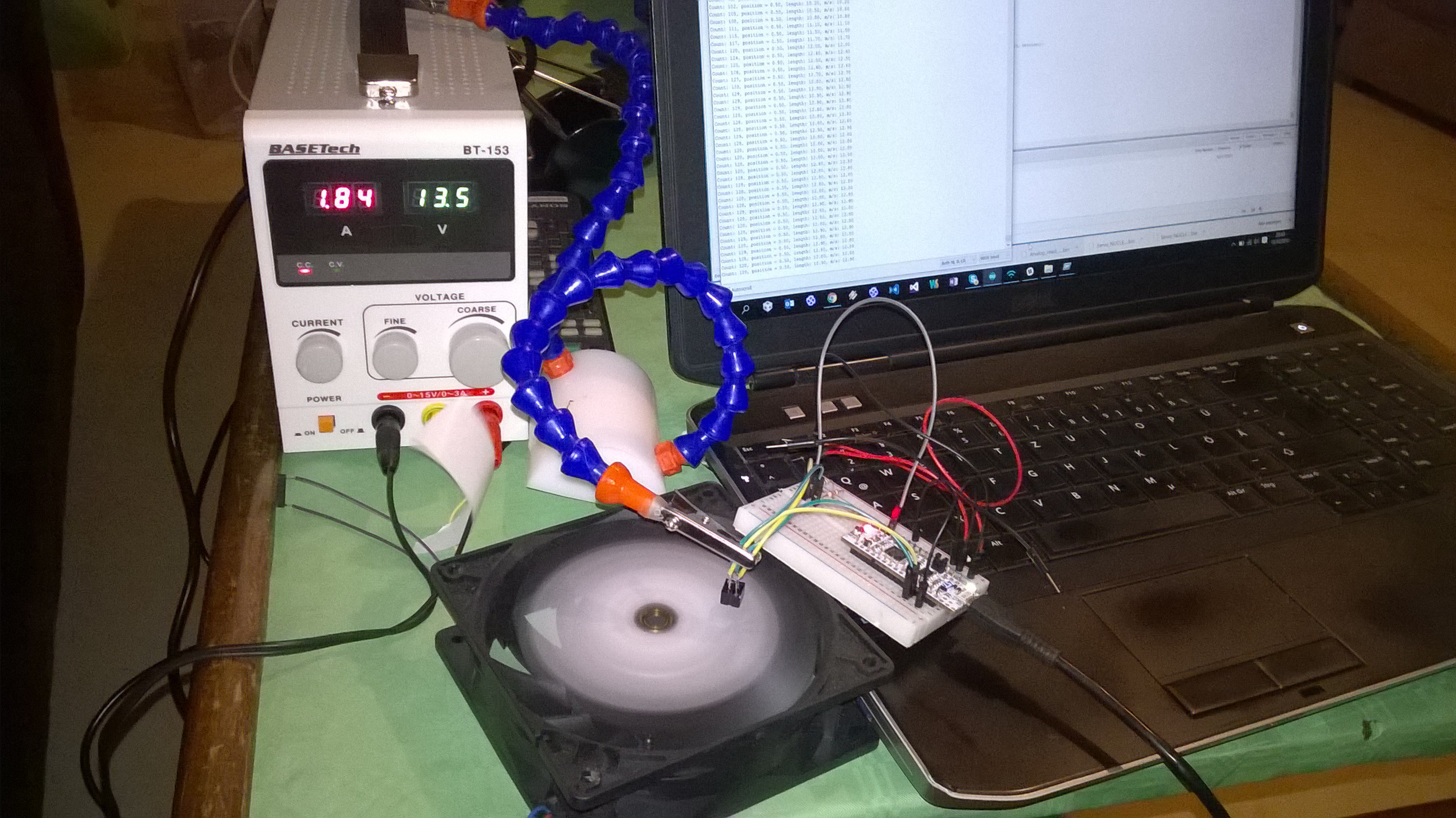
So after more testing and some time trying it on the trainer, I thought to get at least one thing going and built a board to fit the STM and the power supply for the servo.
Here you see me riding my bike on the trainer and my high sophisticated test setup: The breadboard clamped to the trainer with a spring clamp.
After I found everything working ok I soldered the board together,... also highly sophisticated (without any plans and I think it was 01:00 am). Next time I should plan ahead, it will definitely save me some time and headache.
Again some testing and I must say: I feel safer already knowing my trusty rubber band will hold everything in place....
I thought about using my ANT+ sensors to calculate my speed/distance, but my garmin hub sensor only works accuratly when combined with GPS ...so sinc I'll be training in the basementon, on a "stationary bike" .... no GPS data for me.
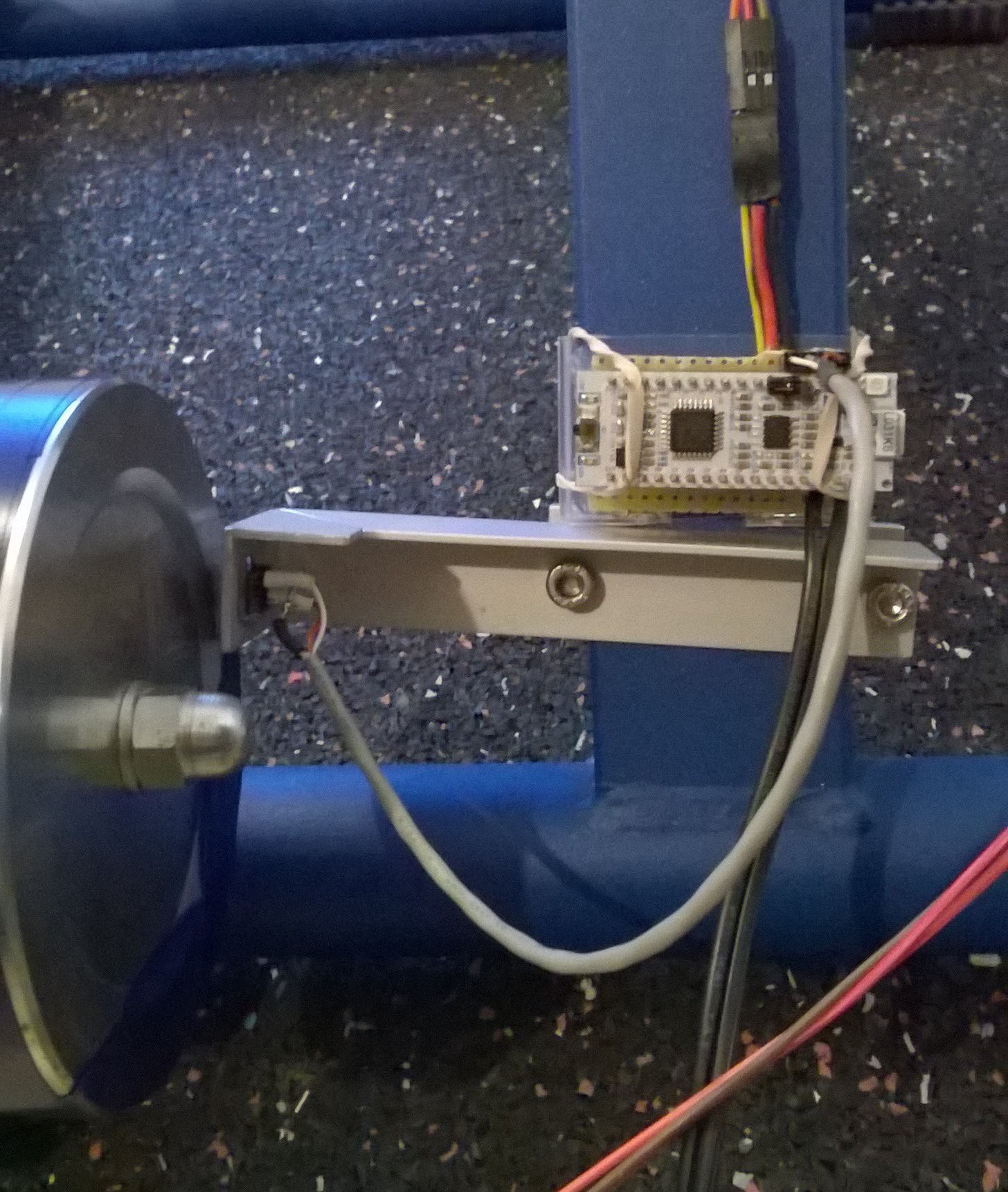
Therefore I built a sensor to get the data I need.
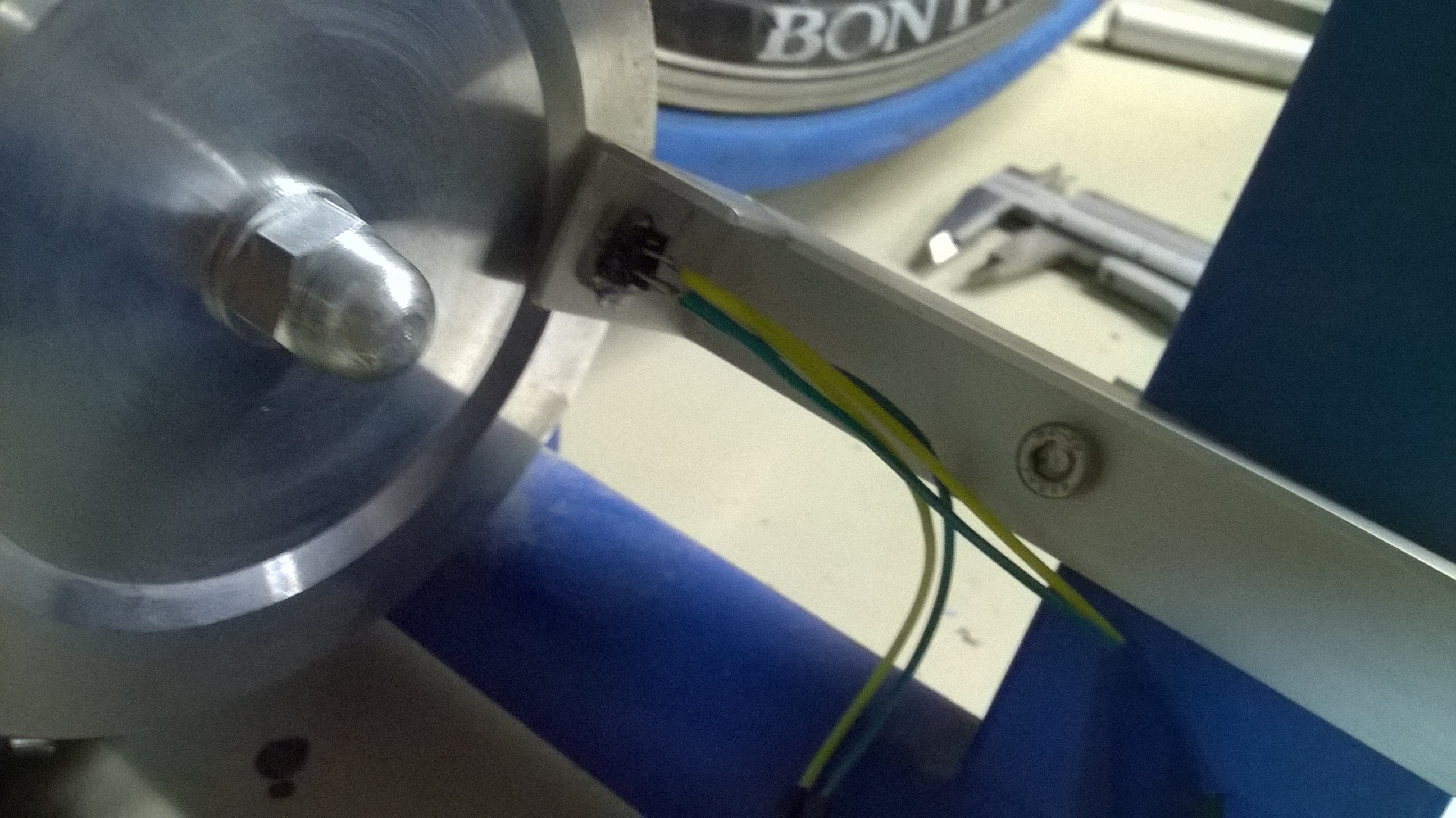
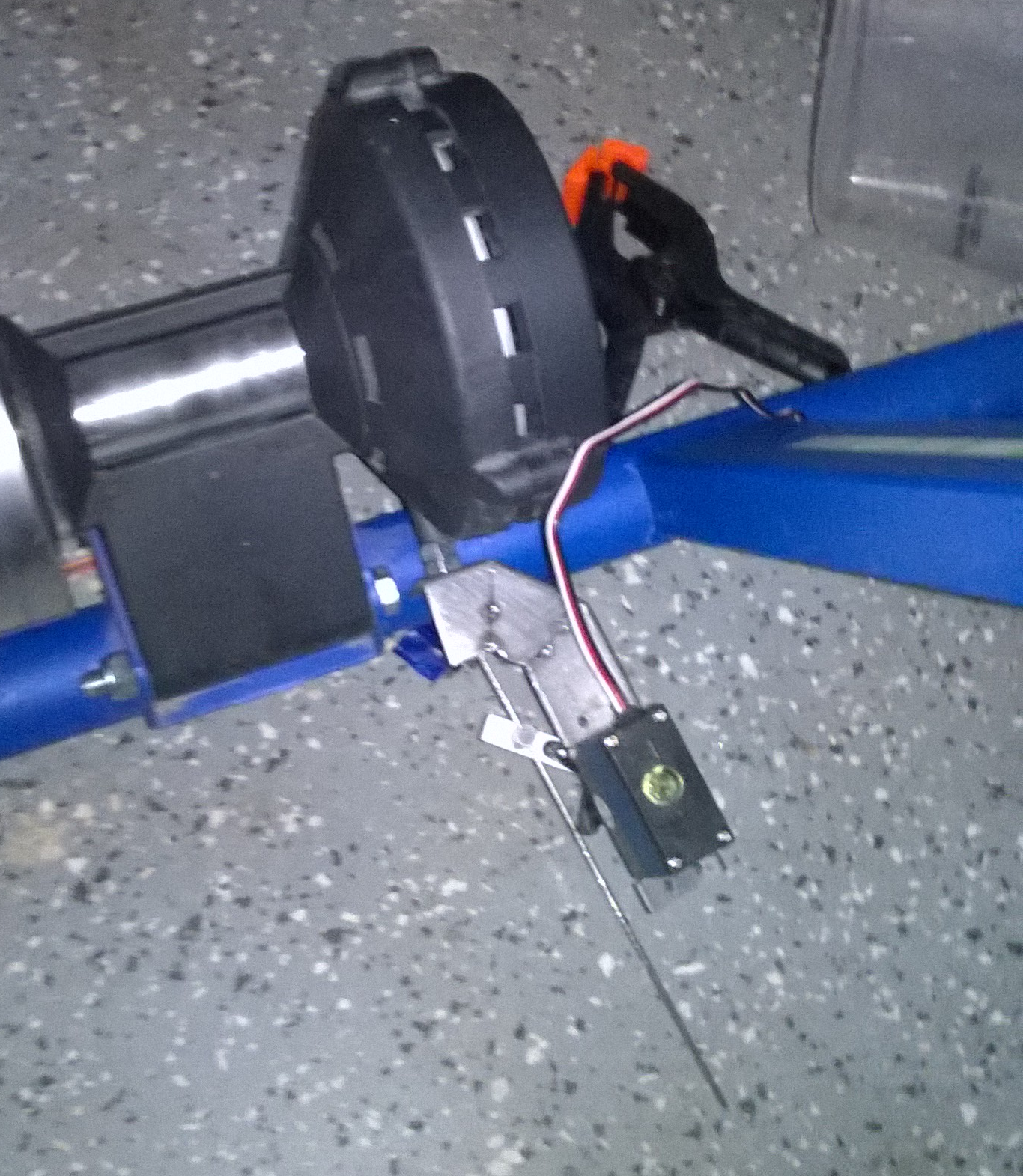
I'm using the the flywheel from the bike trainer and a CNY70 (Reflectic Optical Sensor) to calculate my speed and travelled distance.
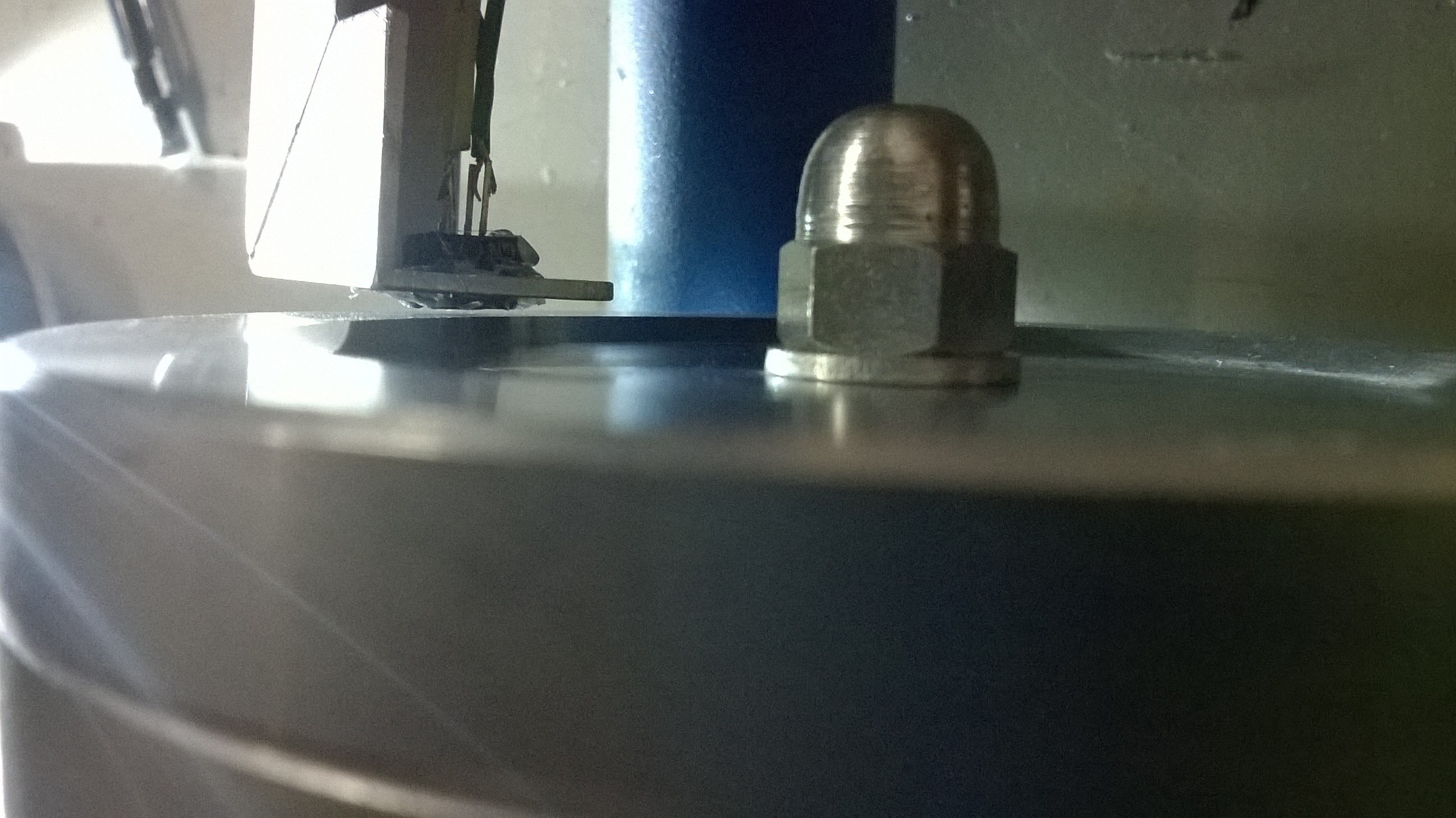
Here, my "minimal-invasive" version of a sensor fixture.
First test on how and where to put the sensor. I'm shooting from the hip here,... (no plan made previously)
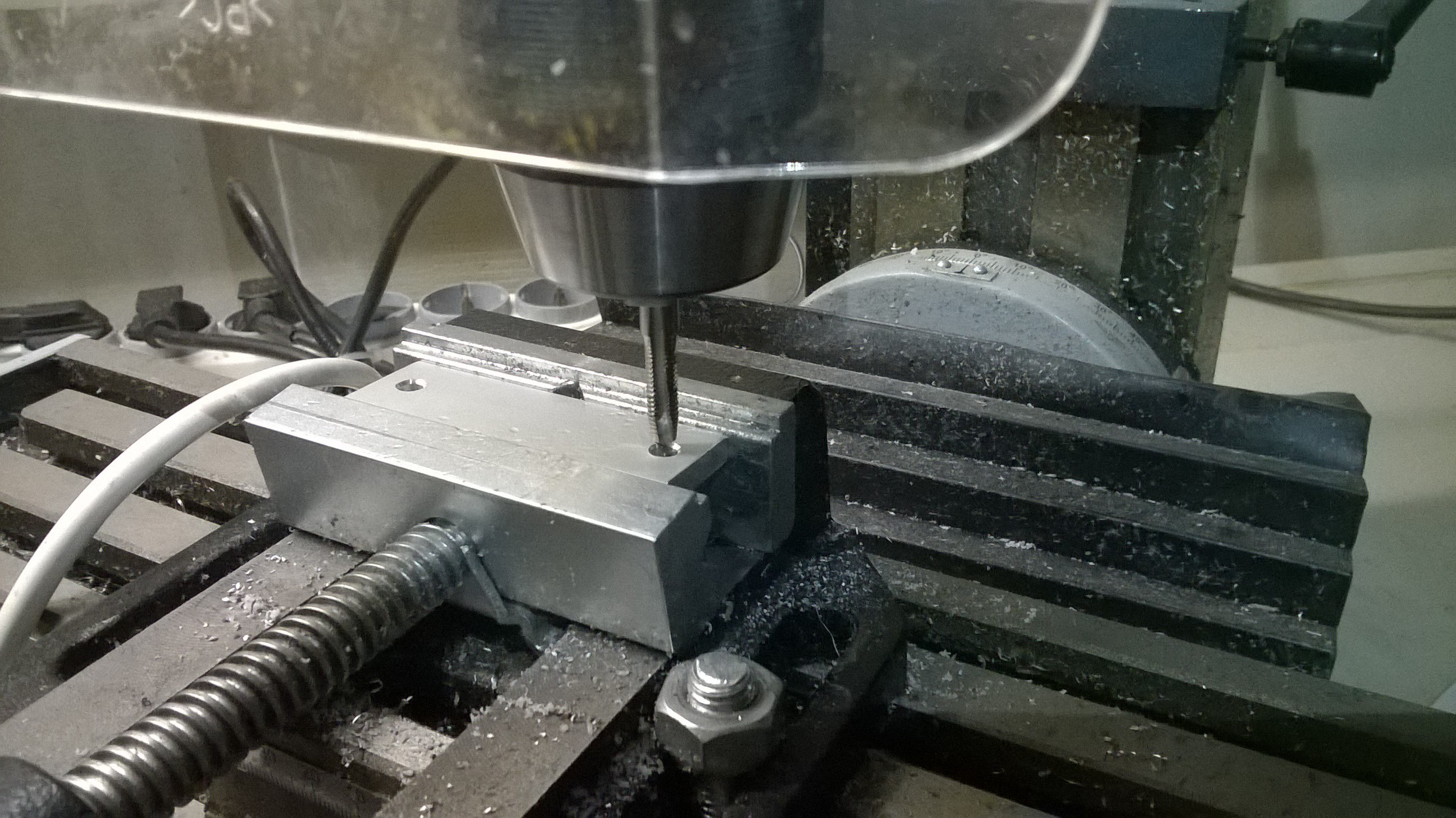
Sawing and bending the aluminium profile
Drilling and cutting the thread on the counterpart
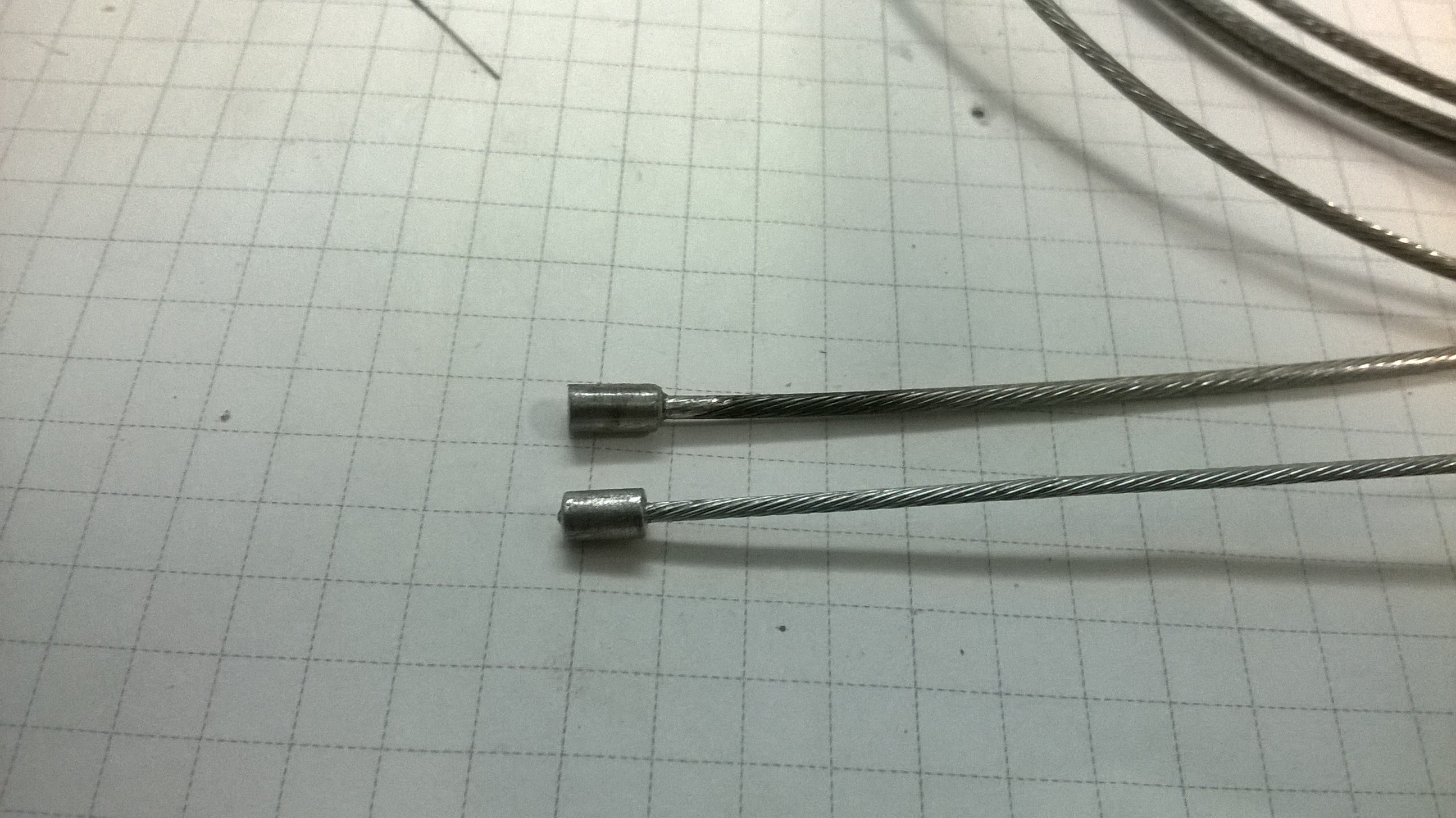
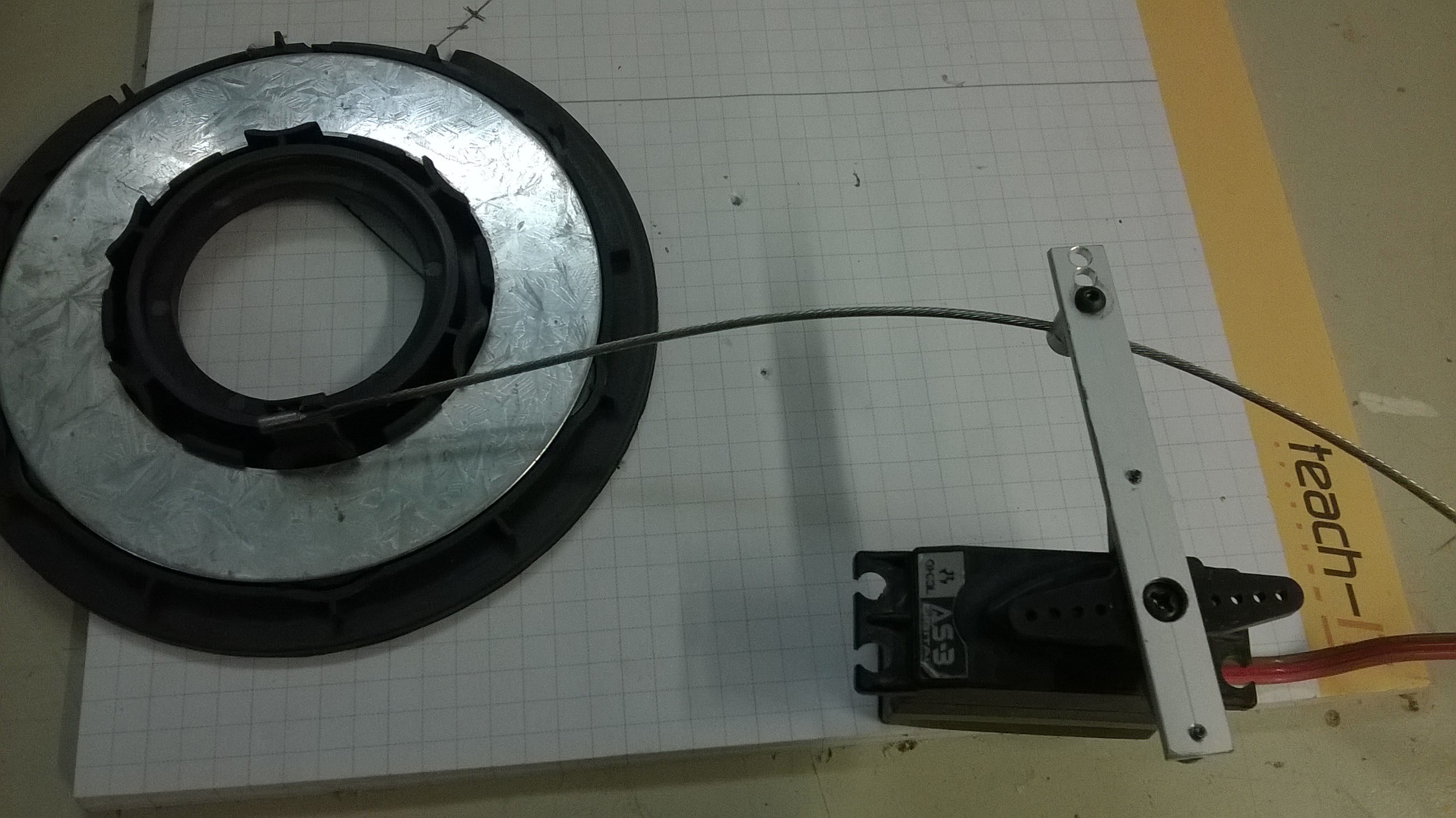
To change the resistance on the bike trainer I had to "update" the bowden cable parts.
I didn't want to destroy the old system so I manufatured my bowden cable, from some bike break cables and a nail. It's a bit more rigit due to the thickness, but this will help during "push and pull" of the servo.
This new cable was then fixed on the eddy current brake (this part previously had a spring, but the servo can push and pull the cable,... so no need for it).
Here my first test fit.
And the first test fit with everything put back together.
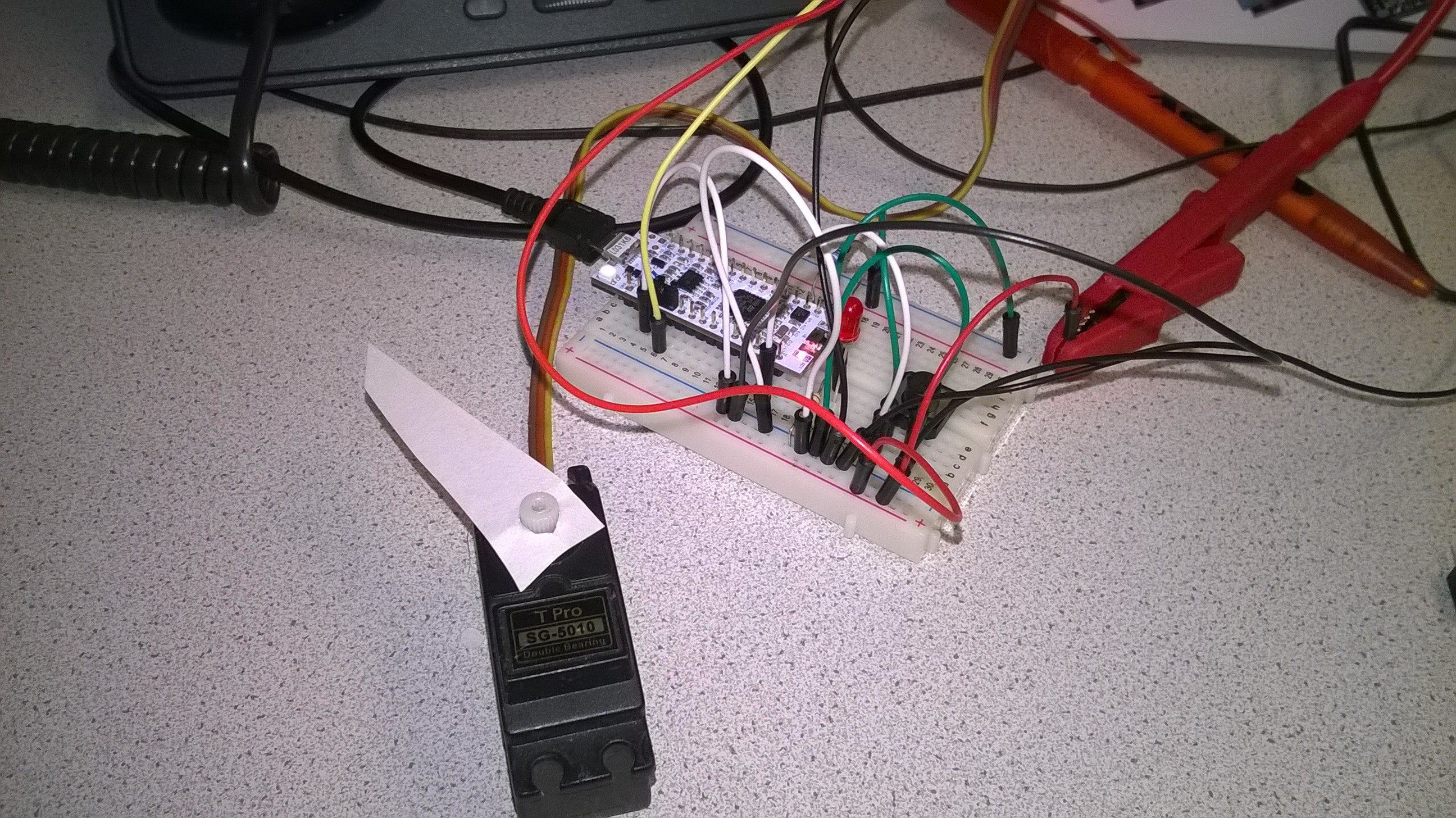
For testing I used an remote control and found that the servo needed more power.
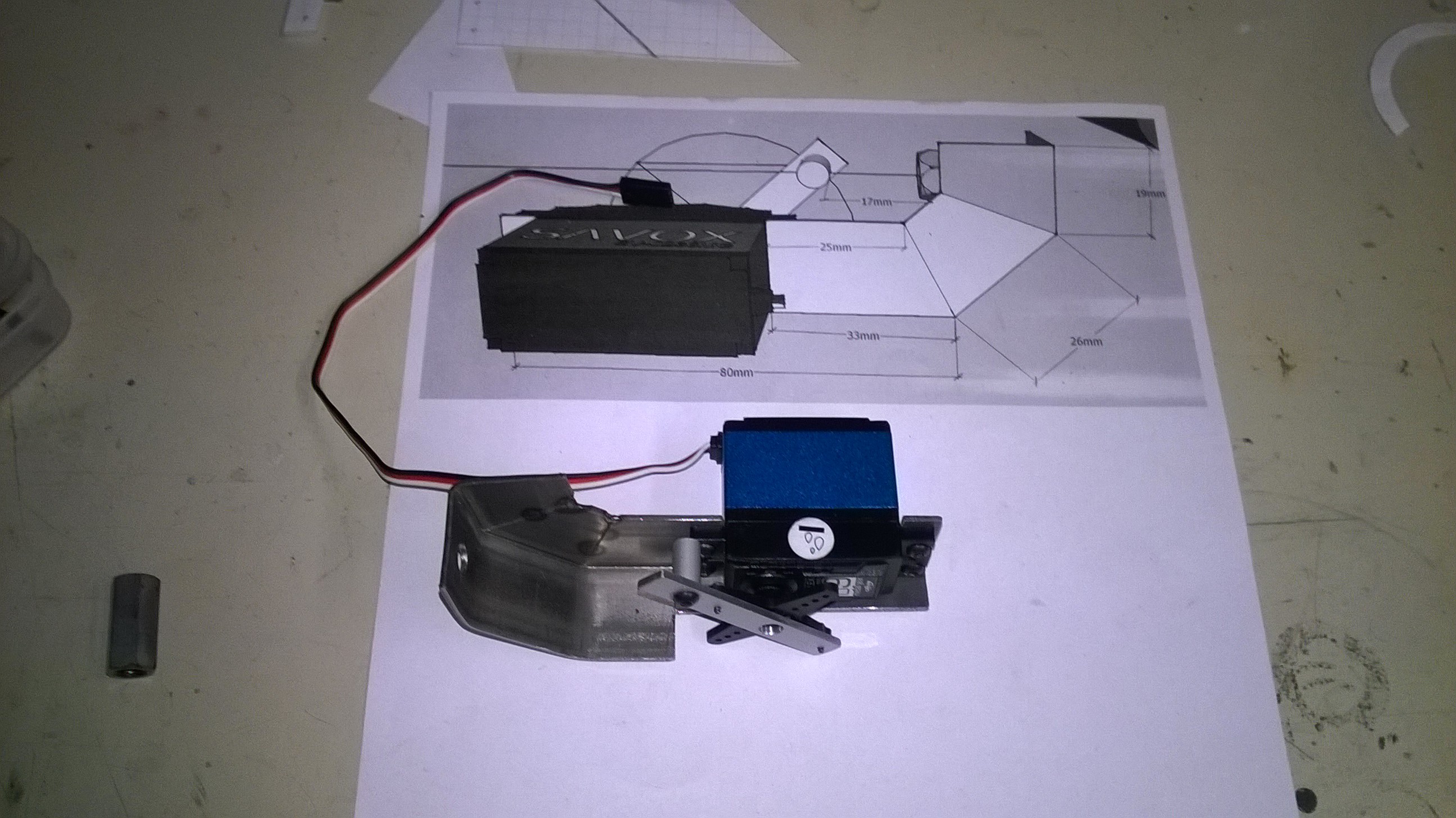
Next thing to do was to build a servo fixture.
So I bent and tack welded some angle steel I had around the shop. (I know,... I need more practice welding)
Finally some holes and threading for the servo and the new servo arm with the correct length.
Last check back with the plans.
And one last (blurry) picture with everything put back together.
 Richard Deininger
Richard Deininger