lion mclionhead
lion mclionhead-
Waist strap
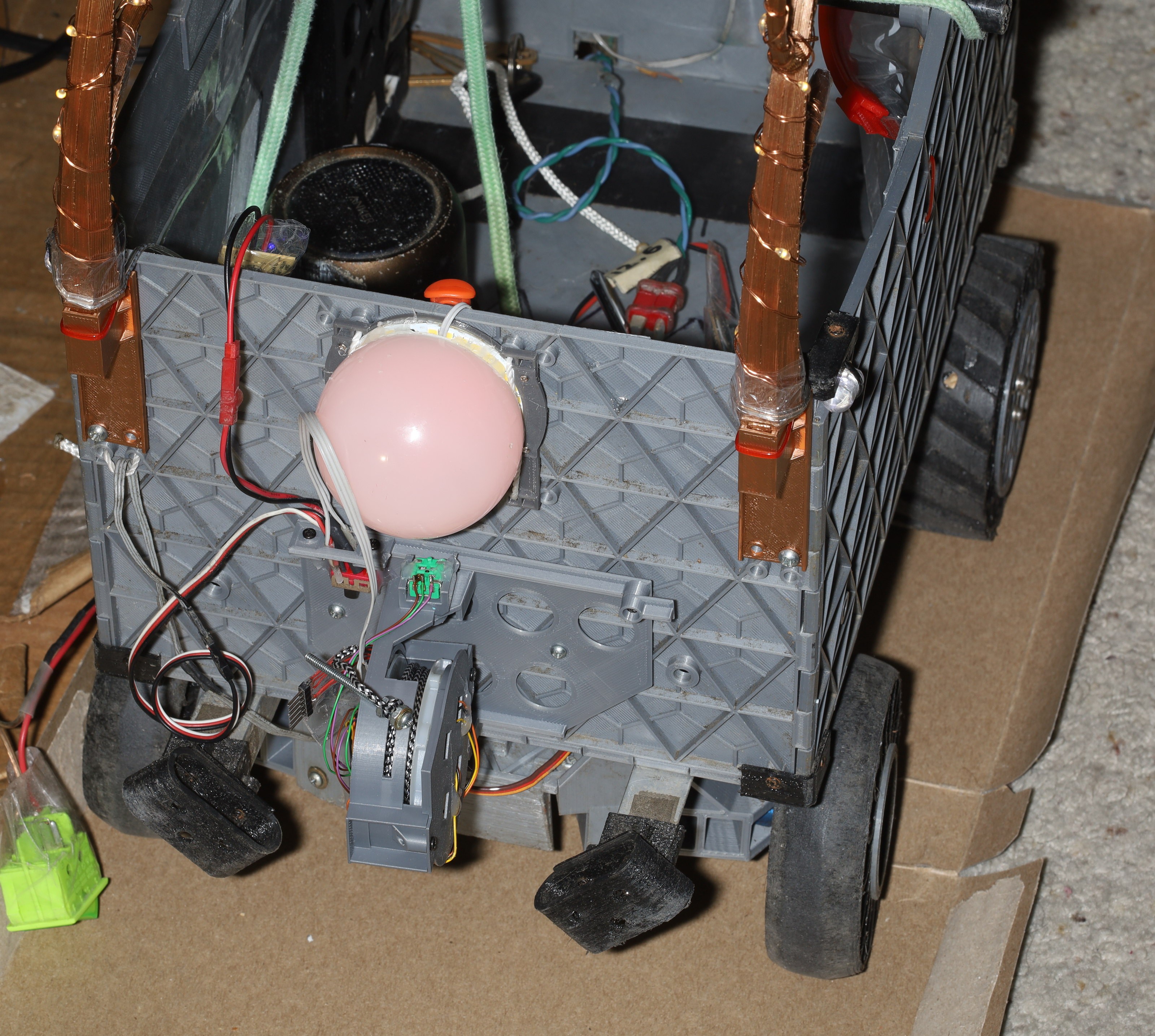
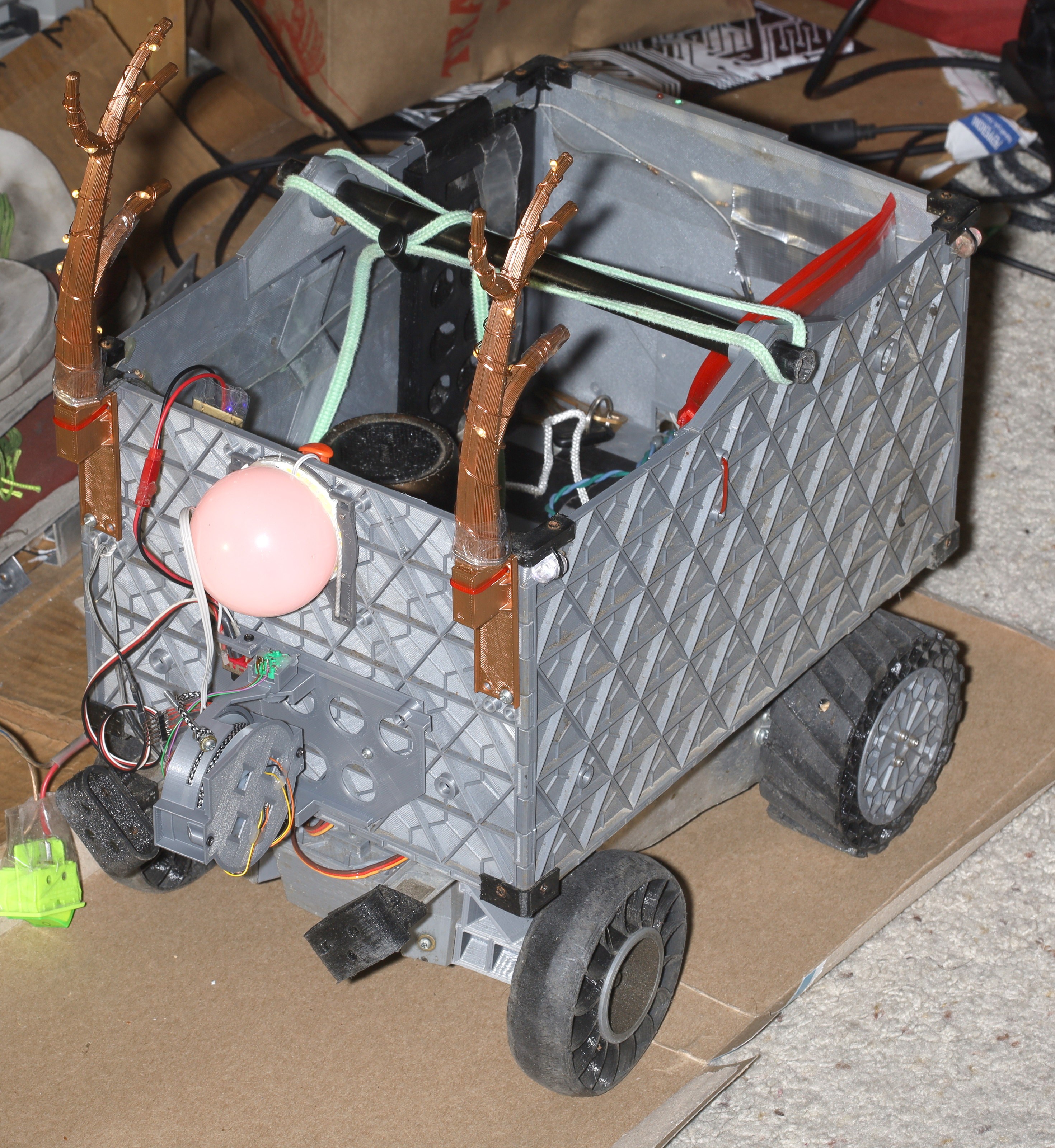
12/07/2022 at 23:31 • 0 commentsBy meal 3, the lion didn't drop any food while driving. The oscillation still seems to be from friction in the steering. Steering gain might have to be lower. Meal 2 confirmed it was impossible to pour the food while holding the leash without the robot speeding up & getting ahead. Meal 3 was the 1st with the waist strap.
It might be a pain in the mane to put on, but having 2 free paws while driving is a game changer. An animal could probably leave the waist strap assembed & step into it rather than threading the cord lock. You can't feel the robot when using the waist strap. It provides more confidence than pulling by paw. Lions are prone to move their paws in unpredictable ways.
If it drives ahead of the lion, the steering deflects erratically & it goes out of control. This is the 1 kaboom case. It could happen going downhill. There's some braking, but not enough to stop it from rolling down a hill. It could happen in a case where the retraction broke & all of the leash extended. Maybe another animal could run into the leash & pull it out.
Being on the subject of leashes, what most animals use are these folding wagons.
https://www.amazon.com/Sincely-Folding-Utility-Portable-Capacity/dp/B09HBJYKSX
![]()
As far as lions can tell, it doesn't have any steering or brakes. The handle is on a separate gimbal from the wheels. Forget about pulling it 20 miles. It's not paw free like the waist leash. It could form the basis of an off road robot.
-
Meal #1
12/06/2022 at 21:36 • 0 commentsThe 1st attempt to eat while driving had the center "angle" at a 5. This tends to put it right behind the lion when driven with the right paw. Center of 15 puts it to the left of the lion. Center of 0 puts it too far to the right. The center value has proven more useful than expected.
Steering oscillated because of an artifact from offsetting the center angle. The forward motion of a walking animal oscillates. It doesn't affect steering when the animal is directly ahead. When the animal is on the side, the forward oscillation is translated into an angle oscillation. The forward step of the right paw pulls the leash left & makes it want to turn left. The back step of the right paw retracts the leash & makes it want to turn right.
Managing the leash led to half the food being dropped on the road, but this is just a matter of practice. Holding the leash & food wasn't a problem. After a while, you gain enough confidence in it to not look at it.
Then, the experiments done years ago paid off when control transitioned from the leash to the stick controller. The stick controller could go in the clean paw instead of the food covered paw. It took a long time to create a controller which could go in either paw.
There was a tendency to use the force of the leash as a brake. The mane problem with leash testing is weather. Most of Calif*'s rain happens in December. Rain is nearly continuous until January when we don't get any rain at all.
-
Pot management
12/01/2022 at 23:15 • 0 comments![]()
![]()
With the pot now on the bottom facing up, the pulling force transferred directly to the metal pot case instead of the plastic, steering wasn't as smooth as before. PLA is good at chewing up metal so this idea might be short lived.
The leading idea is a big old PLA bushing covering the entire pot until a small part of the end. Then a TPU sock grabs the end of it. The TPU sock flexes on 1 axis.
![]()
![]()
Easier designed than printed. It would require a separately glued horizontal piece.
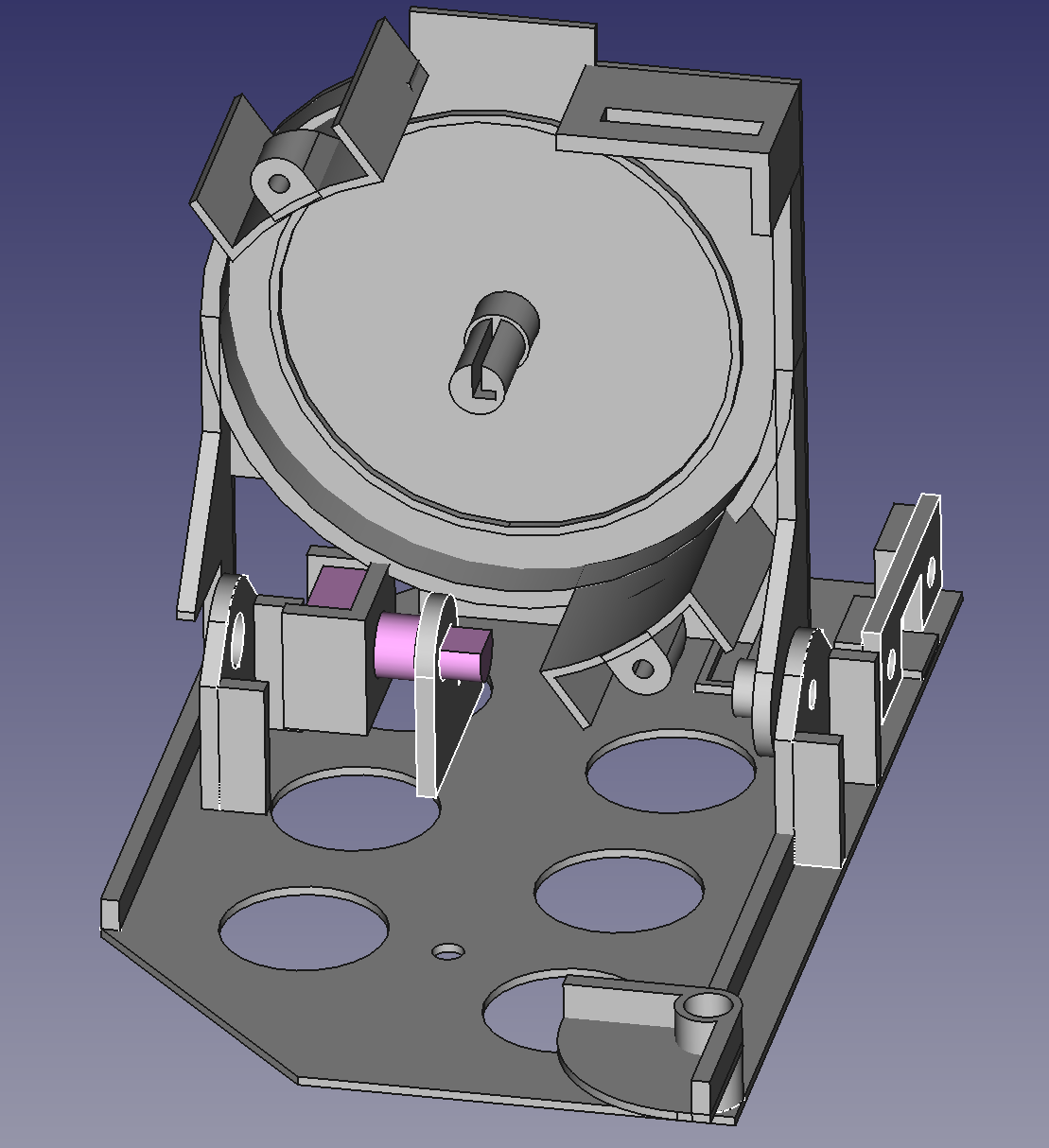
The next idea is the pot going in a TPU sock between 2 outer bushings, where it wouldn't experience any loads. This would make the enclosure a lot bigger. The pot, the sock & all the wiring would be down where the spool is. The sock could be attached by magnets.
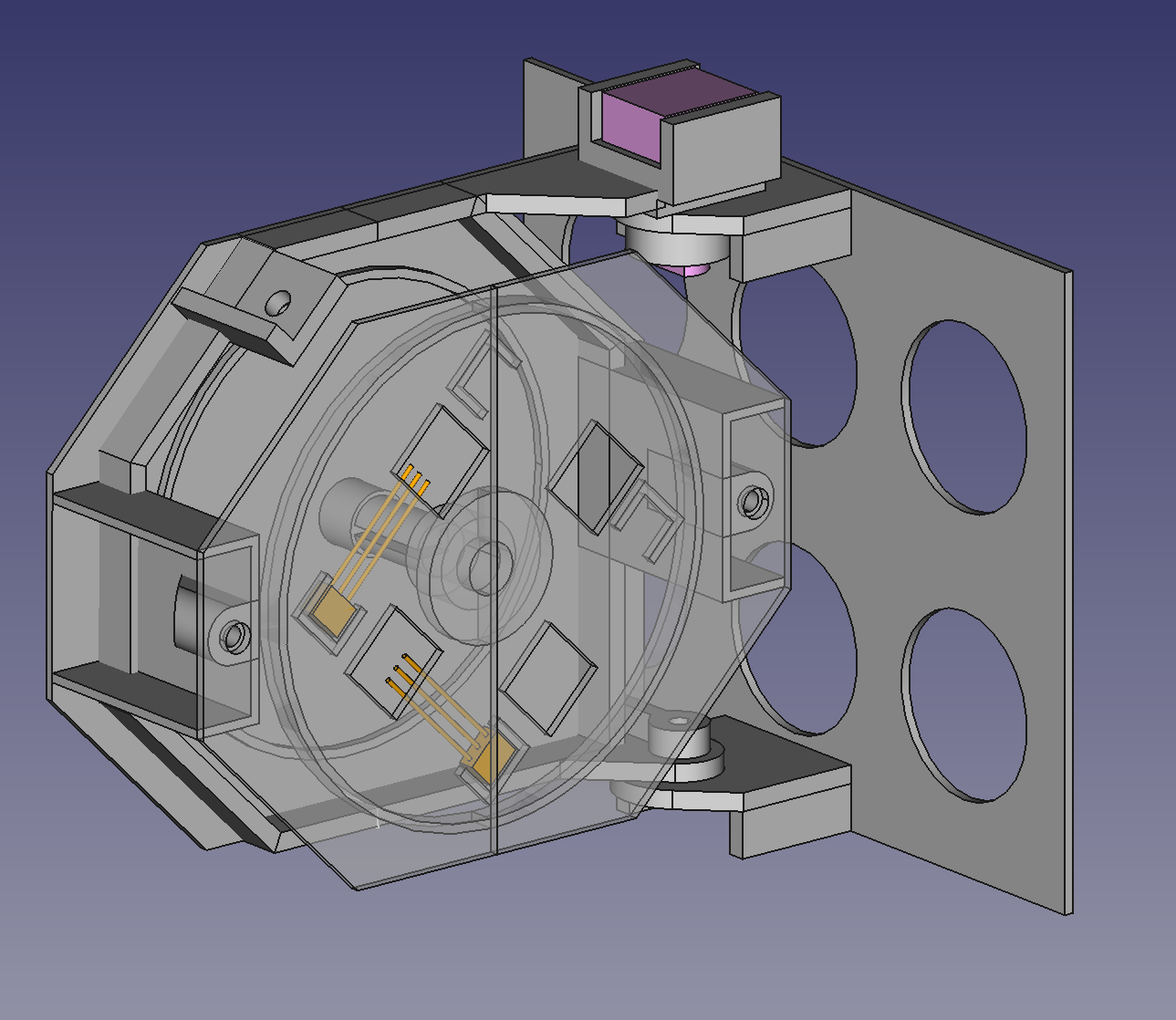
![]()
There's a simulation of the pot & sock crammed in without enough room for the wires. The spool definitely needs to move farther away.
Another idea is not sensing the steering with the entire spool, instead having the spool pivot on load bearing bushings for only pitch. The steering angle would be sensed by a non load bearing thing.
SpinoutsIt was noted that going too fast always makes it spin out. It swerves 1 way until the force of the leash pulls it the other way. The only way to recover it is to retract the leash. You wouldn't want it to spin out on the narrow path. Maximum speed could be reduced by yet another parameter, but you want a faster maximum speed on gravel.
There's always the case of a dead battery leading to pulling it.
It might be over complicated. If it just sensed steering & relied on the animal pulling it for traction, it would eliminate the spool, the encoder, the spinouts. It would take a heavier leash & probably more space.
-
Drive test 1
11/30/2022 at 05:06 • 0 commentsIt was suddenly very hard to find a time to eat while driving it. 1st of all the kind of food lions used to eat while walking is 4x more expensive. 2nd, when the robot already has a large payload, it's easier to bring the food home. There's still a time savings by eating while driving. While the ultimate goal is driving it while eating, it was decided to make the next test a drive on the route without eating to simulate everything but the mane task.
The mane discoveries were:
Raising the paw with food causes the robot to speed up & crash into the lion. It raises the leash, which generally causes more speed & more erratic steering. When the food is lowered, the robot is too far behind. Ideally, the leash would sense height & triangulate a precise horizontal distance but that wouldn't improve the steering. This shows the importance of a triangulated position. It would take some planning to raise the food.
Steering isn't accurate enough to benefit from a sideways offset. You have to keep an eye on it while eating, but this doesn't make eating impossible. Then, there are problems with the leash getting pushed around by the food container. Eating while driving would be difficult but better than nothing.
It always starts up from a stop, but rapidly speeding up after starting up always causes the traction motor to shut down. The traction motor then stays in breaking mode. It has to be returned all the way to minimum starting length but not 0 to start up again. It may shut down when fully extended.
After an unintended shut down, the usual reaction is to use the force of the leash to pull it along. It manages to do it without breaking, but this always pulls the pot out, causing loss of steering. The pot needs to be installed on the bottom, which makes it vulnerable to dirt. The pot could be flipped over in its current position.
The leash enclosure generally must be strong enough to pull a fully loaded robot along. There could be a 3rd bushing to absorb more load. There are going to be losses of confuser control no matter what. The leash is going to get snared in unexpected ways. Despite all its problems, the radio has evolved to be a very solid control in comparison.
None of the self driving suitcases from 4 years ago would be accurate enough to drive in the traffic & crowds that lions eat in.
-
A kingdom for a wrist strap
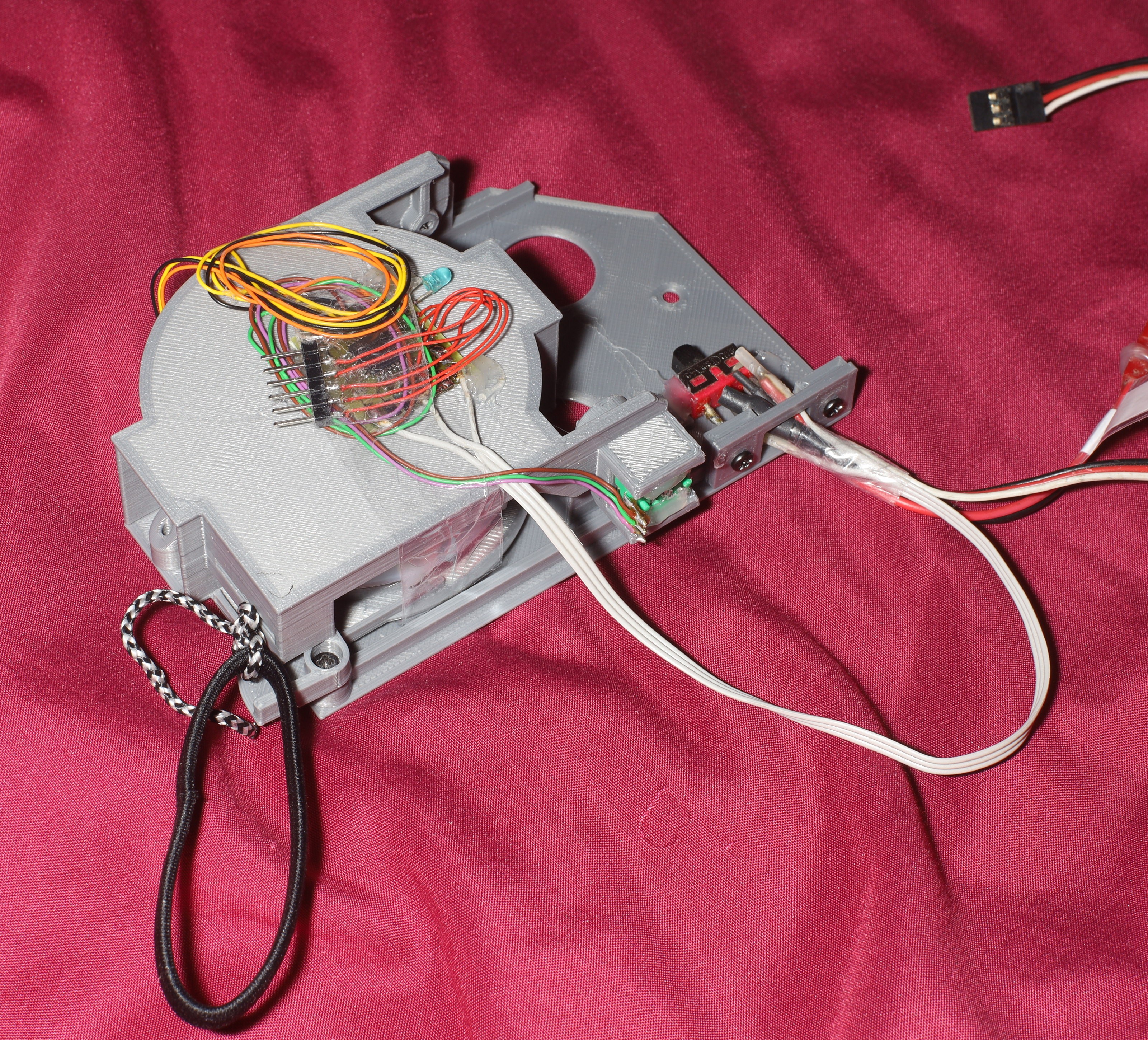
11/28/2022 at 19:07 • 0 commentsThe next need was a passive strap for the animal. The trick is it must be small enough to pack on the robot. It needs a stopper to keep from getting sucked into the spool.
1 option is just to have the animal hold something in his paw like a bolt or a ring. A ring could go on a finger, but if the robot snags something, things could get ugly. An elastic mane strap attached to the string by a plastic stopper could work but the mane straps are too small for a lion wrist. It could go around a few fingers & provide enough stretching to avoid injury in the event of a snag.
![]()
![]()
![]()
Sideways offset
The next big wish is a sideways offset. The simplest sideways offset involves changing the center angle of the pot. The problem is the longer the leash, the bigger the sideways offset. A more accurate offset requires computing a variable center angle from the leash distance & sideways distance. The problem is this requires accurate knowledge of the pot angle & leash distance.
The pot only detects -50 to 50 deg before its voltage saturates. Shorter leash distances would require a steeper angle until it saturated. It wouldn't be steerable at shorter distances.
The sideways offset would be limited to real small amounts by the pot range. This makes a fixed center angle less affected by leash distance. A fixed center angle is a minimal place to get started.
There's no easy way to set the center angle remotely. The paw controller could be reconfigured when the leash was on. The steering stick is not a good way to adjust center angle. The speed buttons could step the center angle with beeps indicating the current setting instead of speed offset. The problem is if an animal is carrying the controller for center angle but not driving the throttle stick, it's going to flop around & interrupt the leash at random. So the throttle & steering would have to be disabled when the leash was on.
The other thing that would need to happen is a gain schedule for running speed. That's another use for the speed buttons. A new paw controller could be built just for leash mode, with buttons for setting gain schedule & center angle. The parts are all end of life. The mane need would be creating a new 900Mhz radio. The bq51013 is end of life. There's a good case for finally making a decent wireless charging alternative. Old timers wouldn't think of Texas Instruments as being fabless, but apparently the BQ51013 went down with TSMC.
Center angle & gain schedule would initially be configured in the text file.
Failure modesIt just begs the question of whether there's any case it can run away when the leash is on. The leading case is a hall effect sensor wire breaking after it's fully extended so it never detects a retraction. It stays at full throttle. There was 1 case where it didn't detect an extension, but so far no cases where it didn't detect a retraction.
Another failure mode is the leash becoming unbolted & deflecting steering randomly.
Finally, there's the paw controller bashing around in the container. It could get powered on & erratically override the leash.
There's still more need to override the leash with the paw controller because the leash doesn't support reverse.
-
Navigation demo
11/25/2022 at 21:54 • 0 commentsDebated whether to create a new truck board or hack into the debug header, the trick with the debug header is programming it requires plugging TX & RX into the UART dongle. Using the leash requires wiring TX & GND to the UART dongle with RX & GND going to the leash.
Then there's overriding the autopilot. The general idea is if the 900Mhz is on, it overrides the leash. If the 900Mhz is off, it normally disables the motors. Now the motors have to be enabled for another case.
The next problem is if the leash should send high level rate of turn & RPM commands or if it should send PWM to the servo & throttle. The high level option has a lot less parameters. There's steering center angle, steering proportion, starting distance, starting speed, speed proportion.
![]()
![]()
Made a doubler to bolt the leash on the container. Made a very minimal cable which taps the debug output while allowing the leash to send to the debug input.
The best steering algorithm ended up being direct leash angle to PWM. The best throttle algorithm ended up being distance to high level RPM goals.
Overriding steering in any practical way with RF requires turning off the leash. Throttle override just requires retracting the leash.
Noted the leash tends to get stuck full left when it gets caught up in its latch. The latch has to be lowered when it's driving.
It now needs structural reinforcement to keep the wires from breaking, a wrist strap, a higher update rate.
Steering is accurate enough to keep it on a sidewalk with careful attention. It could use a radius extension to improve steering accuracy.
It's not obvious in a video that it's self propelled. It's actually a good idea since amerikans like to ban self propelled vehicles wherever they can.
-
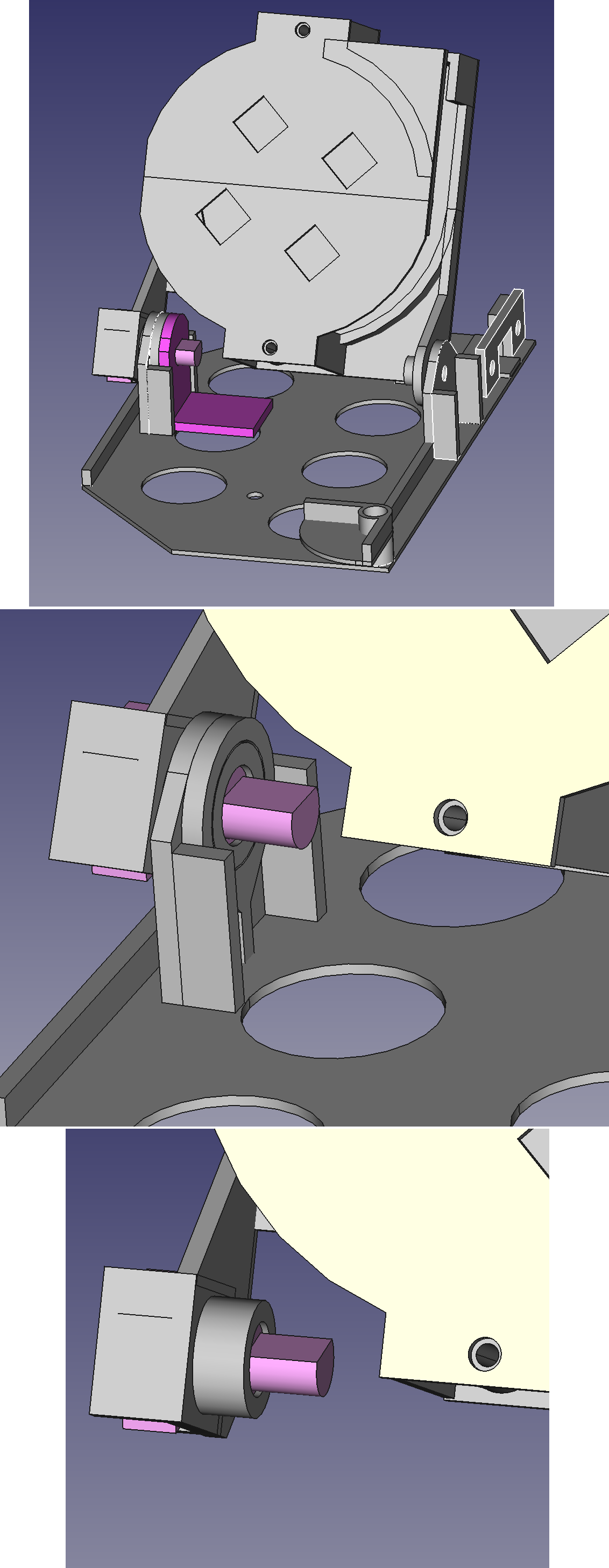
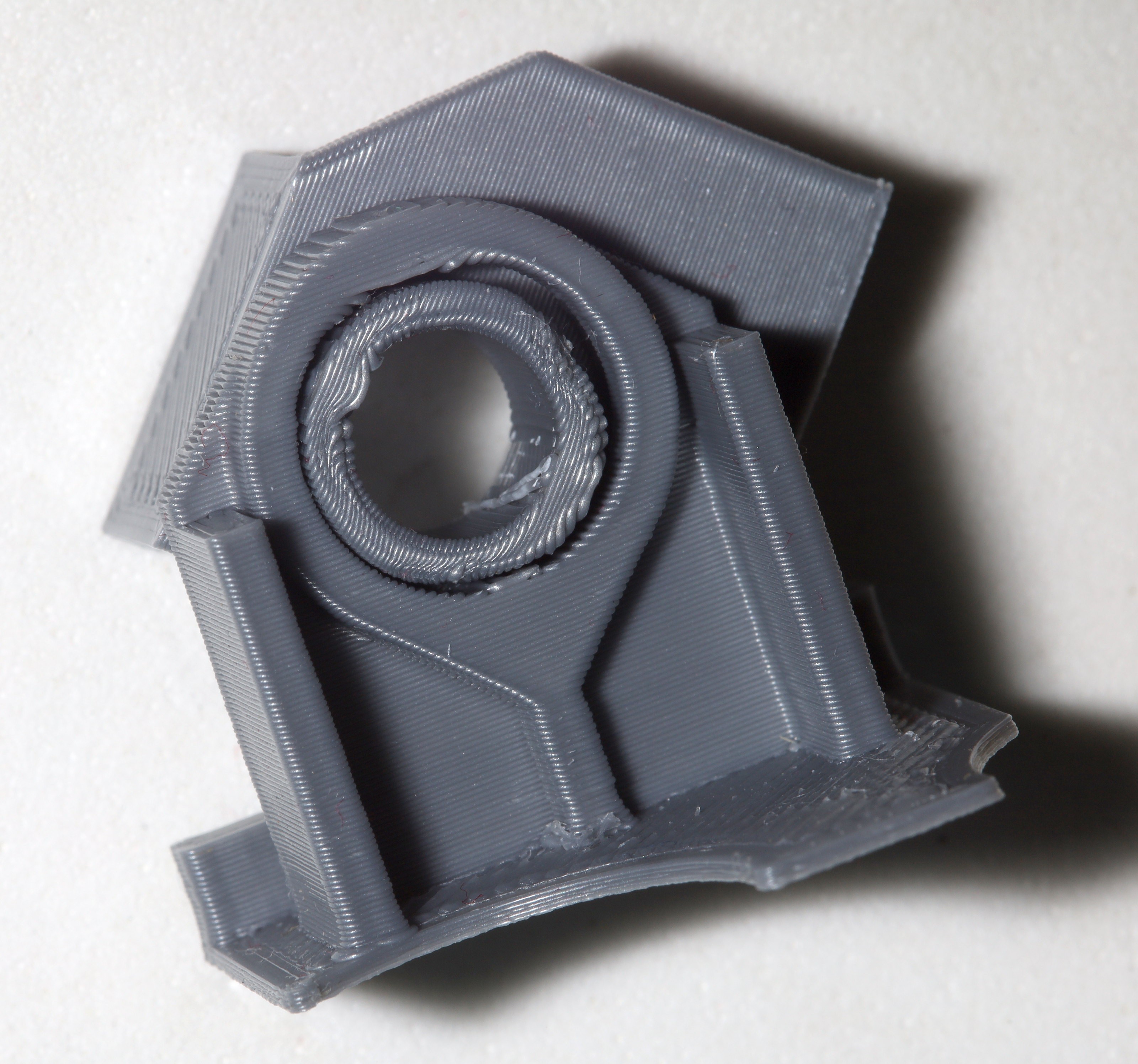
Enclosure 2
11/25/2022 at 03:05 • 0 comments![]()
![]()
![]()
This one has the provision for stowing, the mounting points, the switch.
![]()
![]()
![]()
![]()
Despite the clean renders in Blender, it was still a hot glue mess. There has to be a lot of extra wire in order to disassemble it.
The mane concern is how stiff the steering is. There's a lot of friction in those PLA bushings. It may end up requiring ball bearings with hall effect sensor. The string slit could be moved farther out.
-
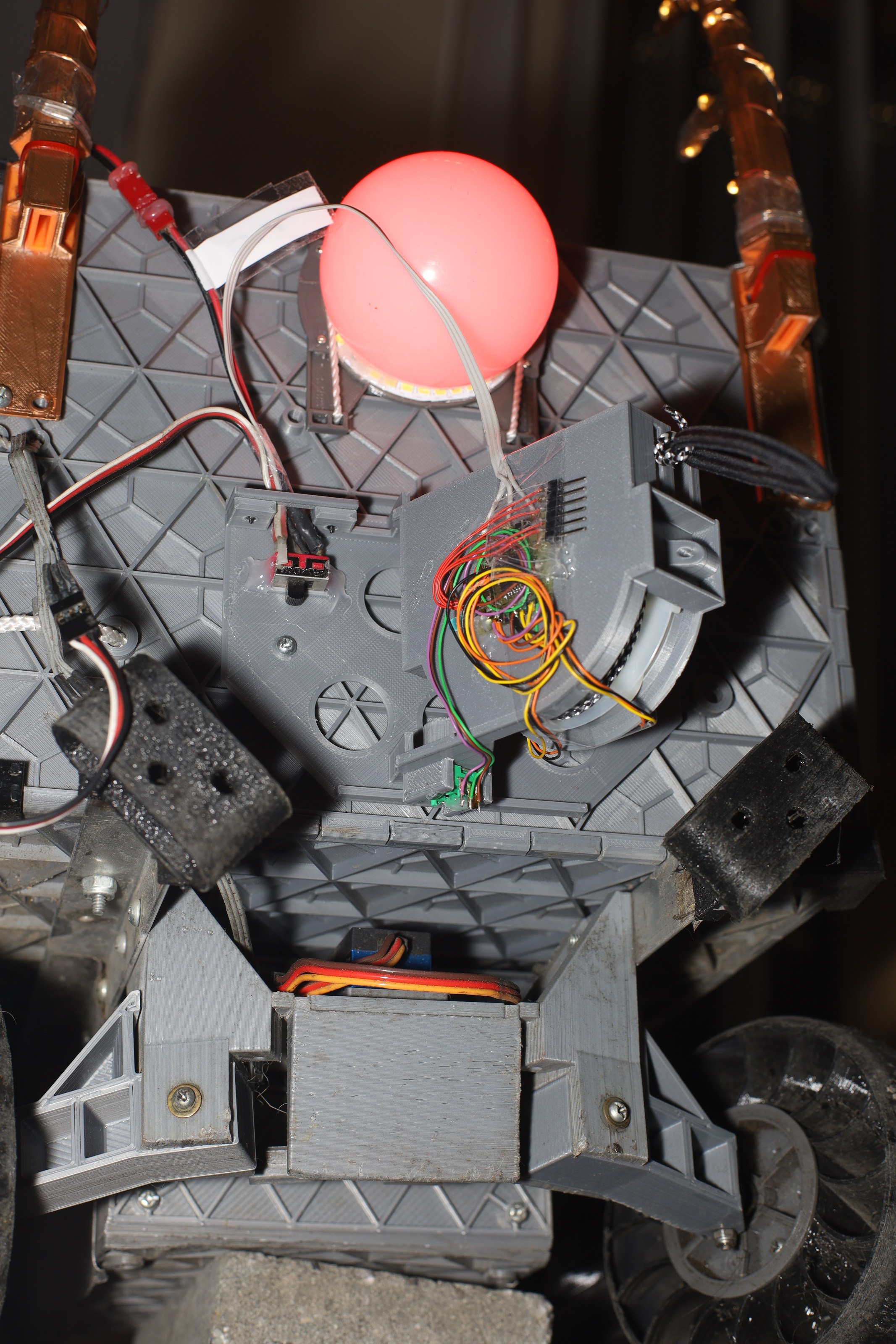
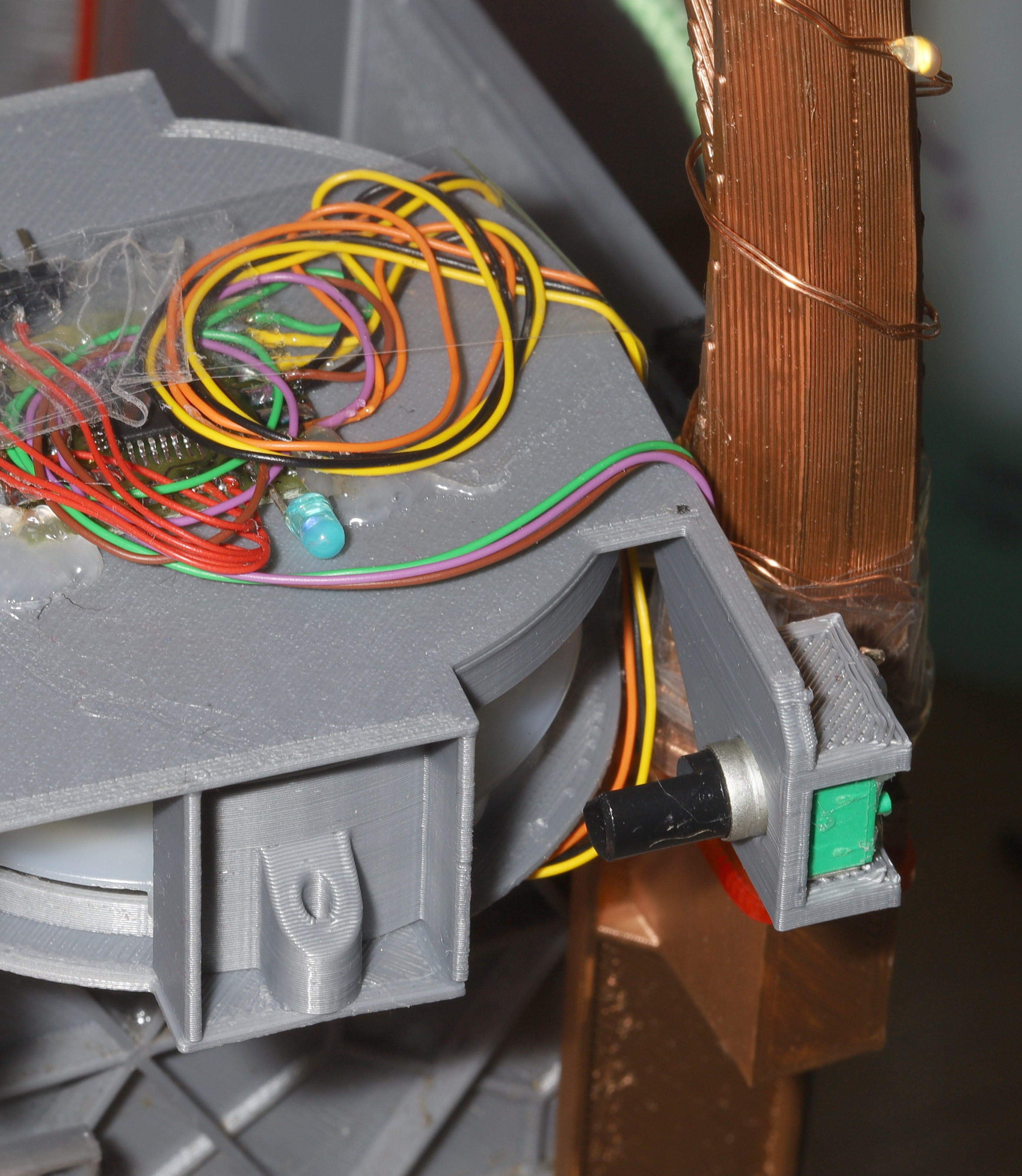
Electronicals
11/22/2022 at 18:39 • 0 commentsRecovered a dead atmega328 by soldering on a crystal. Soldering atmegas when they're powered up causes their clock setting to get corrupted, but so far not their reset pin setting. It's going to need a dedicated UART from the mane confuser in order to bundle power on the cable or it's going to need a lot more cables. The cables have to rotate with it.
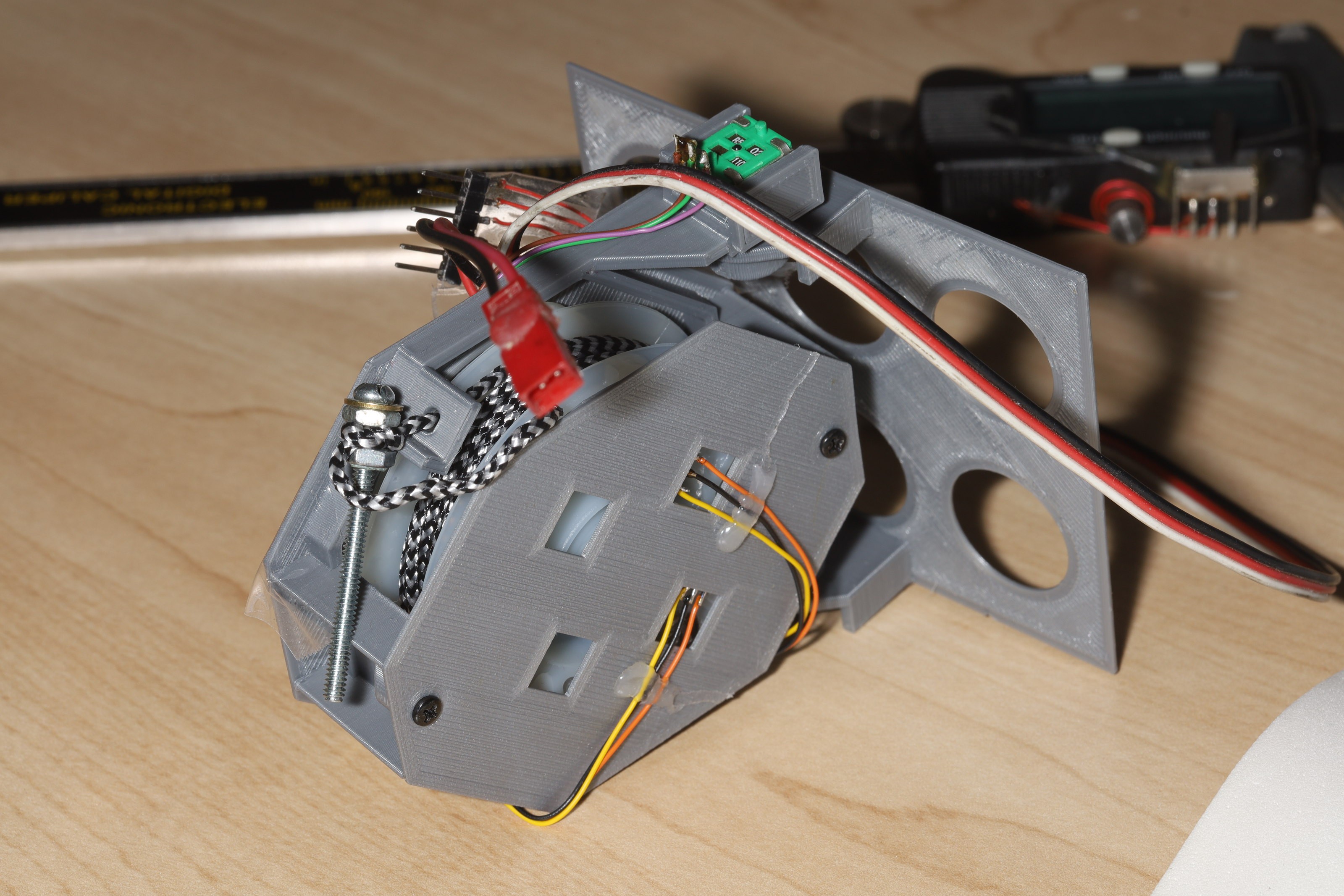
![]()
![]()
Noted the compaction of the cable causes the encoder to drift by 1 count, since it's measuring spool turns rather than length of cable. There's a way to farsten the pot with a screw instead of hot glue. The whole enclosure needs to be protected from the elements. The rotation is too fast to send raw ADC values over the UART. It needs to send computed angles & distances.
-
Leash enclosure
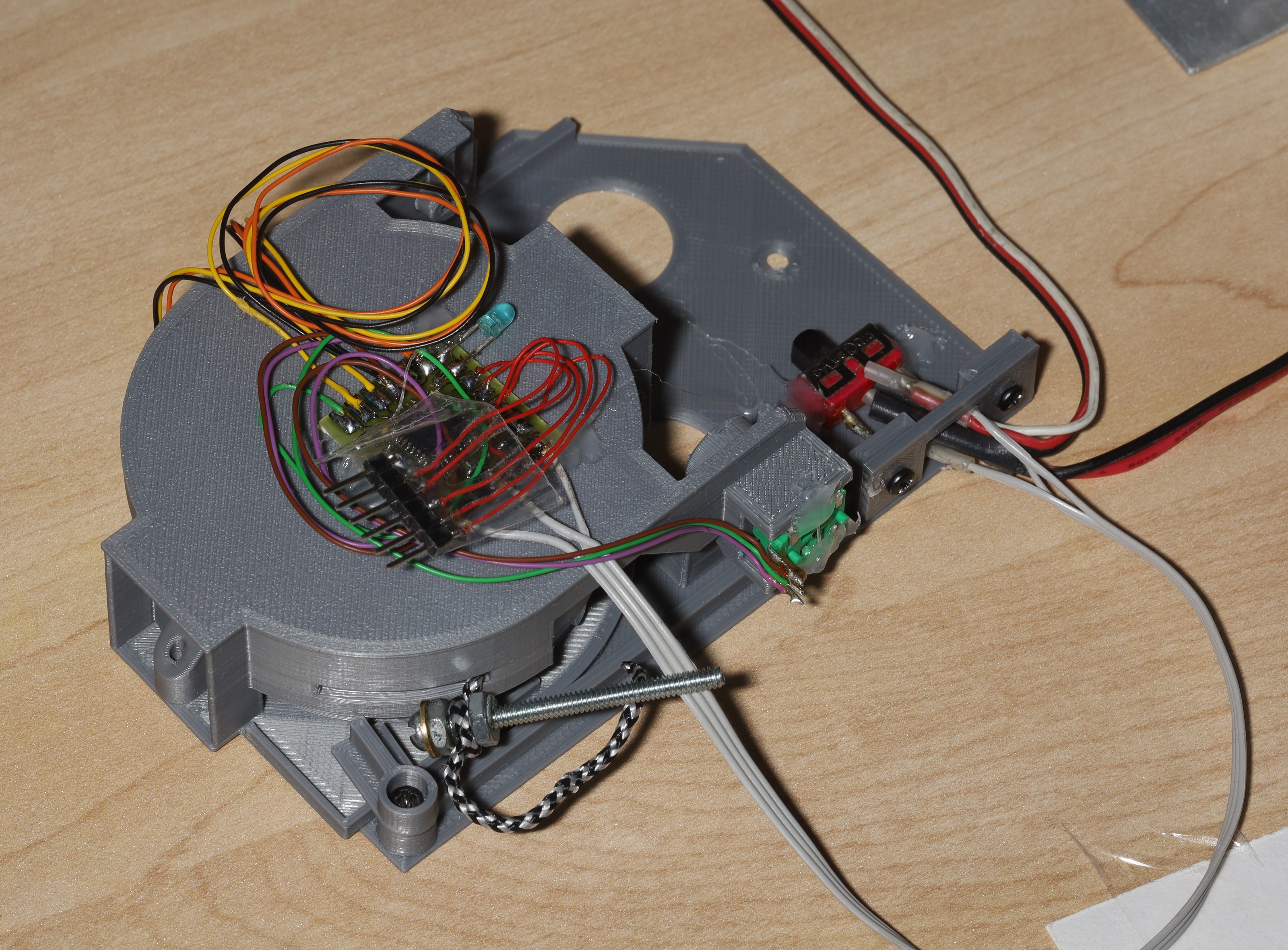
11/21/2022 at 05:17 • 0 comments![]()
Having a self contained spring reel reduced it to just a couple hall effect sensors & a pot.
![]()
Magnets are hot glued in.
![]()
Hall effect sensors are glued in. This arrangement gives direction & quarter turn accuracy. The lion kingdom highly desires a more reproducible method of farstening hall effect sensors. A more compact adhesive would get most of the way. Most modern sensors are soldered on a board & the board is put in.
![]()
![]()
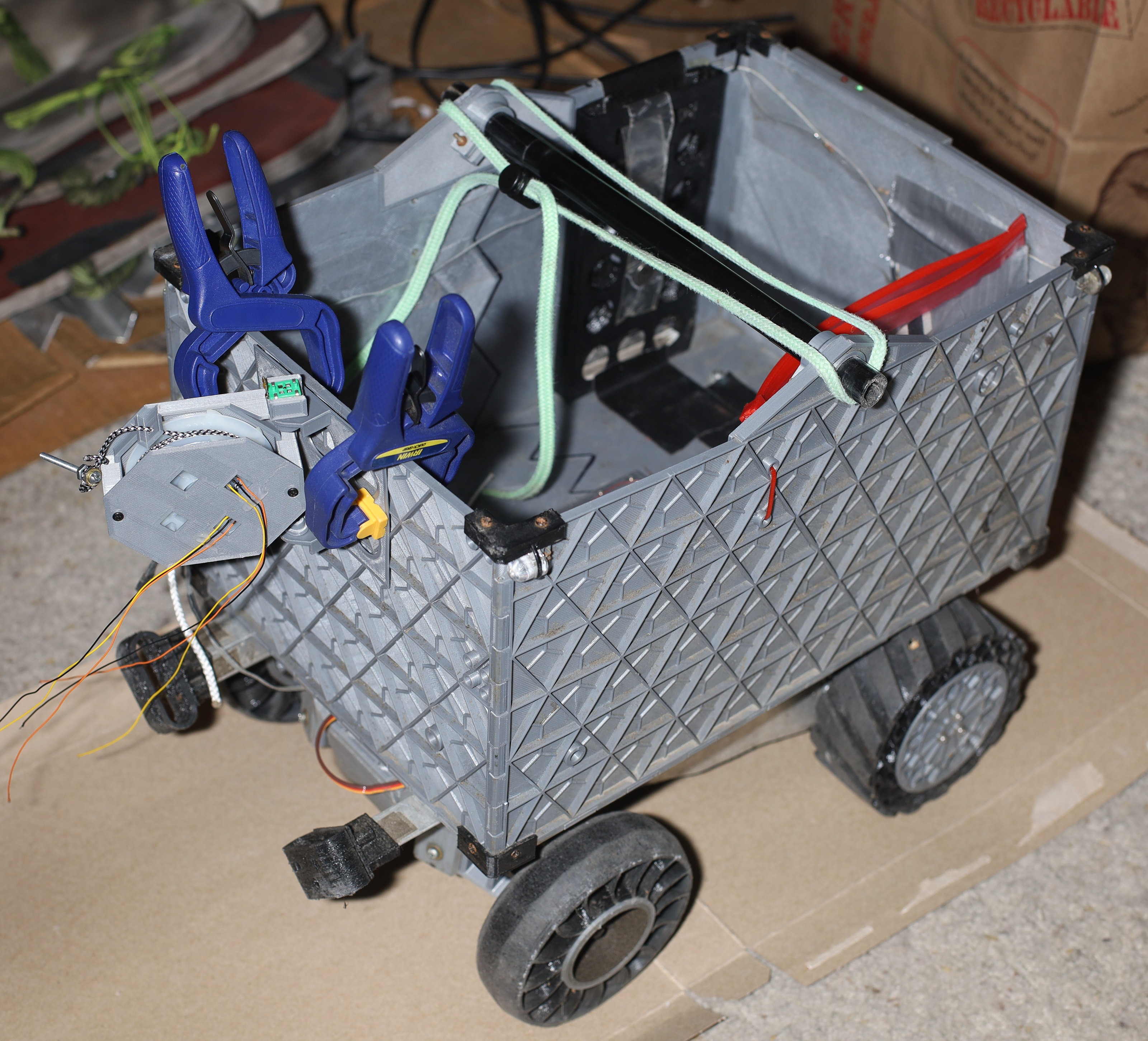
A test fitting on the robot showed it meeting the requirements for tension & steering. It would ideally be down near the wheels but it's going to require a new front panel.
![]()
Using a prebuilt leash part means discarding a lot of parts intended for an animal, but lions discard a lot of ball point pens to get the springs.
-
Retractable animal leash
11/20/2022 at 01:01 • 0 comments![]()
It's just a string winder with a pivot. How can it be so complicated? Something has to support the parts & be manufacturable. Facing the rapidly escalating complexity of this, model airplane rubber bands, clutches, confuser fans, & animal leashes got appealing. Computer fans have the hall effect sensors & brushless motor control in a convenient package, but if they stall they shut down. They also don't make as much torque as hoped. A model airplane rubber band would have to stick out the side of the spool & be very bulky.
![]()
After a few prints trying to dial in the tolerances, along came the smallest animal leash made, the Flexi. It actually compresses 10ft of string in less space than the motorized retractor.
![]()
Pictured with robot for scale, it's smaller than a motorized retractor can hope to be.
![]()
It's not serviceable without destruction.
![]()
The special sauce is a self contained spring + spool. There's nothing special going on to keep the string untangled besides constant tension. The spring was permanently enclosed by a press fitted blue thing.
![]()
The end of the spring slips down a channel in the shaft.
![]()
The spool rotates entirely around plastic bearings. There's a ratchet mechanism which acts as a break. Ditching the ratchet could further reduce the size. An axial spring keeps it from rattling. It's liberally bathed in grease to dampen it.
The great task is creating a new enclosure for it, attaching magnets to it for an encoder, detecting sideways movement.
![]()
Note how sections of plastic were manually ground away to seemingly smooth out rough parts of the rotation.