 Nithin PS
Nithin PS-
1Robot build
As you can see from the build image, the power bank is attached on top of the zumo chassis using double sided tape. On top of the power bank attach a piece of rectangular aluminium section cut to the width of the chassis to hold the pi and the pi camera in place. Pi and the pi camera is also attached in place using double sided tape.
Find files for 3D printing the robot body here -> https://www.thingiverse.com/thing:6025164
-
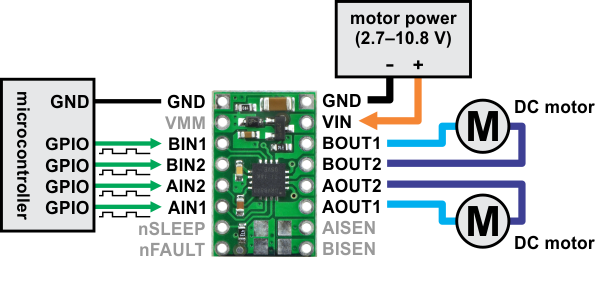
2Wiring
![]()
We are using GPIO23, GPIO24, GPIO22, GPIO27 and ground pins for motor control.
Raspberry Pi based Robot with web controls
This Raspberry Pi based Robot uses a web interface for remote control and Google assistant for voice control
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.