zpekic
zpekic-
EMZ1001 hardware tester available!
10/02/2024 at 16:53 • 3 commentsI don't know much about this project (I have problems logging into the website and interact with translated simplified Chinese), but it is super cool and wanted to share here:
-
Implementation in VHDL - RAM and lookup tables
12/27/2022 at 22:00 • 0 commentsRAM
All EMZ1001A RAM is implemented on chip, as 64 nibbles, arranged as 4 * 16 matrix, addressed by 2 bit BU (mr_bu) and 4-bit BL (mr_bl) registers. There is really no provision for external RAM, although possibly it could be implemented by INP and OUT instructions combined with manipulation of A lines, but it would be very inefficient.
RAM is implemented as 2-port read, 1 port write:
- System read is always RAM[BU, BL]
-- RAM is pointed by BU and BL ram_addr <= mr_bu & mr_bl; ram <= mr_ram(to_integer(unsigned(ram_addr)));- Debug read is always RAM[dbg_sel]
-- select debug outputs (RAM) dbg_mem <= mr_ram(to_integer(unsigned(dbg_sel)));
dbg_sel is generated by VGA going over rows and columns of the screen, so each RAM cell ends up displayed on their position in the 16*16 debug window
Write operations are driven in the main on_clk_down() process, so the input MUX is generated inside the state machine. The most interesting operations are set and reset single bit of memory:
when opr_stm => -- STM mr_ram(to_integer(unsigned(ram_addr))) <= ram or mask8(7 downto 4); when opr_rsm => -- RSM mr_ram(to_integer(unsigned(ram_addr))) <= ram and mask8(3 downto 0);No ALU is used for these. Because output of RAM is always known (RAM[BU, BL]), and bit position can only take 4 values, a lookup table implements all the valid AND and OR combinations which are then simply fed to RAM MUX input:
-- mask for STM (upper nibble) and RSM (lower nibble) with ir_current(1 downto 0) select mask8 <= "00011110" when "00", "00101101" when "01", "01001011" when "10", "10000111" when others;Lookup tables
FPGAs has lots of RAM type resources - both inside slices where they can be used to implement logic, or RAM/ROM, or dedicated RAM blocks for bigger size memories. Lots of random logic can be saved by driving the design through lookup tables. Good example is BL (mr_bl) 4-bit register:
- Value must be checked for 15, 0, 12
- Value must be incremented / decremented
- Value must be used to decode one out of 13 A lines (either as high or low)
All of these are accomplished using single lookup table which has 16 entries and the address is directly BL register:
-- used for PSH (OR, non-inverted) and PSL (AND, inverted) constant psx_mask: mem16x40 := ( X"1F" & "11111111111111100000000000000001", X"20" & "11111111111111010000000000000010", X"31" & "11111111111110110000000000000100", X"42" & "11111111111101110000000000001000", X"53" & "11111111111011110000000000010000", X"64" & "11111111110111110000000000100000", X"75" & "11111111101111110000000001000000", X"86" & "11111111011111110000000010000000", X"97" & "11111110111111110000000100000000", X"A8" & "11111101111111110000001000000000", X"B9" & "11111011111111110000010000000000", X"CA" & "11110111111111110000100000000000", X"DB" & "11101111111111110001000000000000", X"EC" & "11011111111111110010000000000000", X"FD" & "10111111111111110100000000000000", X"0E" & "00000000000000001111111111111111" -- set (or clear) all bits );Upper 8-bits are increment and decrement values, which saves 2 adders, or 1 adder with logic generating 0001 or 1111 on one input saved.
signal psx: std_logic_vector(39 downto 0); alias psx_ormask: std_logic_vector(15 downto 0) is psx(15 downto 0); alias psx_andmask: std_logic_vector(15 downto 0) is psx(31 downto 16); alias bl_dec: std_logic_vector(3 downto 0) is psx(35 downto 32); alias bl_inc: std_logic_vector(3 downto 0) is psx(39 downto 36); alias bl_is_0: std_logic is psx(0); alias bl_is_13: std_logic is psx(13); alias bl_is_15: std_logic is psx(15); -
Implementation in VHDL - instruction decode and control signals
12/26/2022 at 18:33 • 0 commentsEMZ1001A has 51 different instructions (52 with BRK) if counted by assembly name mnemonic. All 256 op-codes are used, but with 6-bit address for JMP and JMS, this means each of these takes 64 op-codes, and all the other instructions 128. State machine with 52 distinct states would be complex and slow, but after analyzing the instruction set, collapsing this number is possible:
- All ALU instructions of A = A op X pattern can be grouped together
- All SKIPs are the same, just vary the source to be loaded into ir_skp flip-flop (only exception is SOS which also resets the 1s counter)
- Setting / clearing of TFx flags is same operation, the new value can be picked up from instruction register (ir_current) LSB
With the above optimizations, 32 different operations are sufficient (5 control bits)
If we split ALU operations that update carry (mr_cy) and accumulator (mr_a) registers, we see that they are only ADC, XOR and AND operations with A, RAM, Immediate (LSN of ir_current) as inputs, but not all combinations of these are needed. 8 are enough to select the required operation (3 control bits).
Finally, analyzing the SKP instructions, we see that 16 sources are sufficient (4 control bits).
With 4 + 3 + 5 control bits, any instruction can be uniquely identified, and each of the 3 main control units driven independently: ALU, SKIP and the register update process.
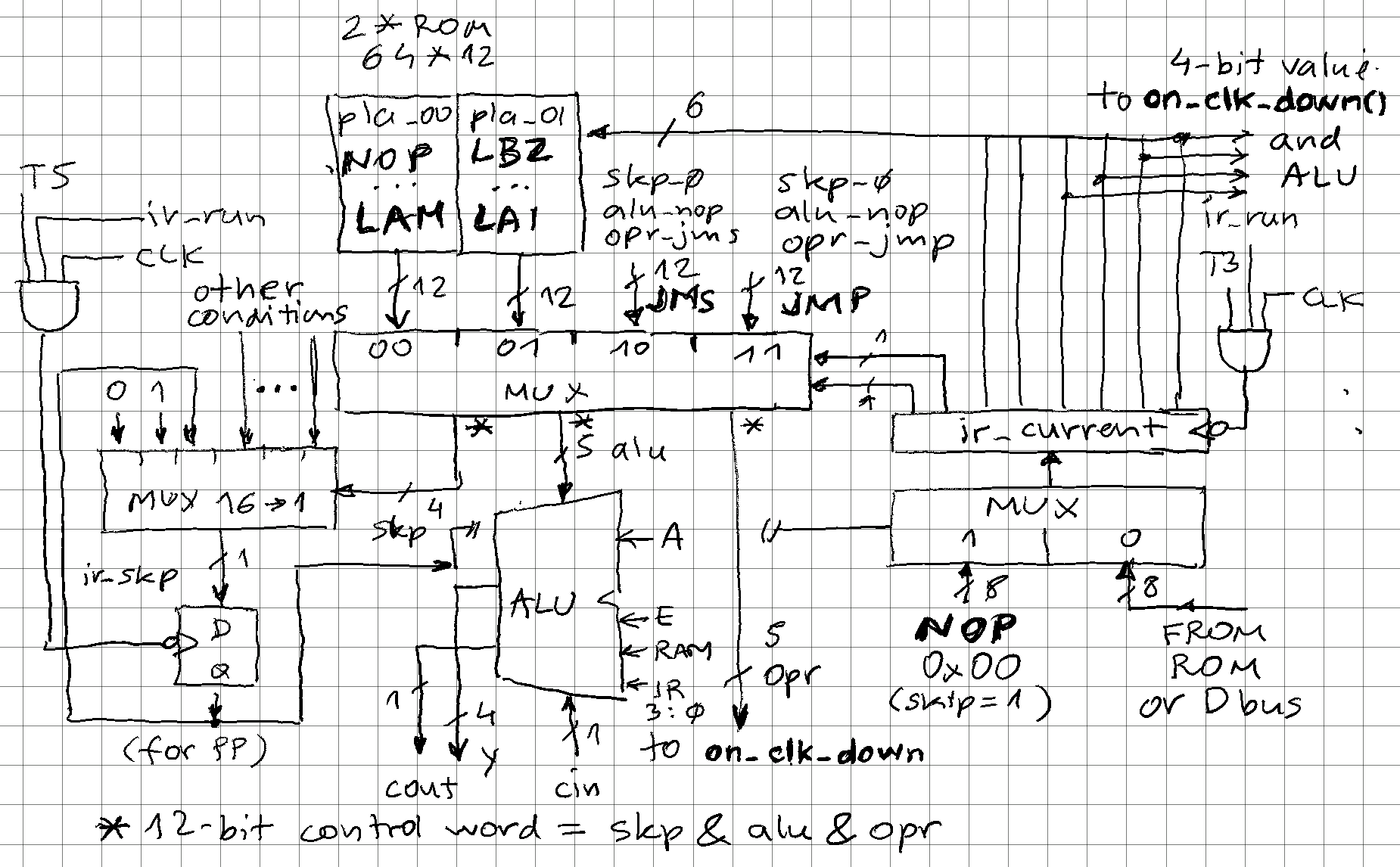
Obviously, a lookup-table is needed to map from instruction op-code to the corresponding control signals. This would be a 256*12 ROM, but because JMS and JMP would be repeat 64-times, splitting the instruction space to 4*64 with a 4 to 1 MUX tied to instruction registed bits 7 and 6 allows cutting this memory requirement in half:
-- instruction decode (256 op-codes split into 4*64 blocks) with ir_current(7 downto 6) select pla <= pla_00(to_integer(unsigned(ir_current(5 downto 0)))) when "00", -- NOP to LAM pla_01(to_integer(unsigned(ir_current(5 downto 0)))) when "01", -- LBZ to LAI skp_0 & alu_nop & opr_jms when "10", -- JMS skp_0 & alu_nop & opr_jmp when others; -- JMP
We see how JMS and JMP are defined as a concatenation of 3 control fields, pla_00 and pla_01 hold these for all the other instructions. "pla" (programmable logic array) is a mis-nomer here because these are simple ROMs, no AND/NOT/OR logic array, but could be implemented in that way.
The MUX above is central piece of the instruction decode logic:
![]()
Resulting 12-bit control word is drives most of the processor internals:
-- instruction decode signal pla: std_logic_vector(11 downto 0); alias skp: std_logic_vector(3 downto 0) is pla(11 downto 8); alias alu: std_logic_vector(2 downto 0) is pla(7 downto 5); alias opr: std_logic_vector(4 downto 0) is pla(4 downto 0);skp - skip
skp is driving a MUX that selects the 1-bit flag or value to load into ir_skp register, which will be checked to either execute the instruction or mask it with 0x00 to become a NOP (which has same effect as skipping). Note the value for PP (prepare page) - skip bit is a pass-through so that is 1 PP is skipped, any subsequent is skipped too. This allows conditional JMP/JMS to any location, not just on current page.
-- select source for updated skip flag (16 to 1 mux) with skp select y_skp <= -- '0' when skp_0, -- never skip next instruction '1' when skp_1, -- always skip next instruction ir_sec when skp_sec, bl_equals_e when skp_ble, (not mr_cy) when skp_cy0, (not y_alu(5)) when skp_cout, a_equals_m when skp_am, (not bit_is_1) when skp_bit, bl_is_15 when skp_blf, bl_is_0 when skp_bl0, not(ik(3) or ik(2) or ik(1) or ik(0)) when skp_ik, -- at least 1 zero detected in I or K after masking ir_skp when skp_skp, -- do not change skip flag, pass it to next instruction mr_f1 when skp_f1, mr_f2 when skp_f2, '0' when others; -- no skip by defaultalu - arithmetic logic unit
ALU is also implemented as a MUX. There are several sources for operations (A, RAM, immediate from instruction register) and few operations (AND, XOR, ADD with and without carry) but not all combinations are present, so 3-bit selection is sufficient:
-- terribly non-optimal 6-bit wide ALU (carry-in + 4 bits + carry-out) with alu select y_alu <= mr_cy & (mr_a xor X"F") & '0' when alu_cma, mr_cy & (mr_a and ram) & '0' when alu_and, mr_cy & (mr_a xor ram) & '0' when alu_xor, std_logic_vector(unsigned('0' & mr_a & mr_cy) + unsigned('0' & ram & mr_cy)) when alu_adcs, std_logic_vector(unsigned('0' & mr_a & '0') + unsigned('0' & ir_current(3 downto 0) & '0')) when alu_adis, mr_cy & std_logic_vector(unsigned(mr_a & '0') + unsigned(ram & '0')) when alu_add, not(ir_current(0)) & mr_a & '0' when alu_cry, -- passthrough to set carry flag mr_cy & mr_a & '0' when others;The idea is that all updated to carry (mr_cy) and accumulator (mr_a) go through ALU, even if just as a pass-through, that way process operation is very simple:
... when opr_alu => -- ADD, ADCS, ADIS, AND, XOR, CMA, STC, RSC -- ADIS must generate carry out for skip, but should not store it! if (ir_current(7 downto 4) = "0101") then mr_cy <= mr_cy; else mr_cy <= y_alu(5); end if; mr_a <= y_alu(4 downto 1); ....opr - register update operation
Finally, the 1 out of 32 operation IDs are consumed in a switch statement within the main process that updates the processor registers. It is up to the VHDL compiler to recognize the process as a state machine and encode these states for fastest decoding based on the settings and nature of the FPGA. The most interesting operations are for XC, XCD, XCI instructions that simultaneously update RAM plus 2 or 3 other registers at the same moment, which is pretty remarkable for a 4-bit CPU.
... when opr_xc0 => -- XC mr_ram(to_integer(unsigned(ram_addr))) <= mr_a; mr_a <= ram; mr_bu <= bu_xor; when opr_xci => -- XCI mr_ram(to_integer(unsigned(ram_addr))) <= mr_a; mr_a <= ram; mr_bu <= bu_xor; mr_bl <= bl_inc; when opr_xcd => -- XCD mr_ram(to_integer(unsigned(ram_addr))) <= mr_a; mr_a <= ram; mr_bu <= bu_xor; mr_bl <= bl_dec; ...Note that there is no "ALU" behind incrementing / decrementing BU (mr_bu) or XOR'ing BL (mr_bl) registers - with known register values and instruction register lower 2 bits, the new values can be looked up in a table and result assigned as new value of BL, BU.
-
Running it on BaSys2 FPGA board
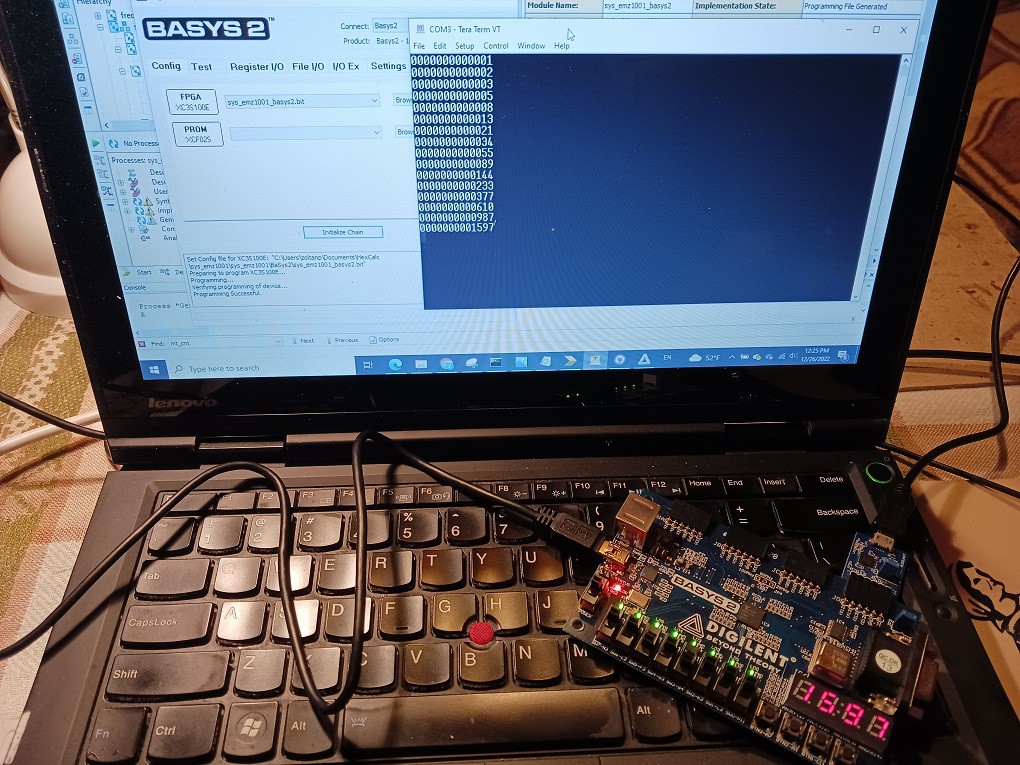
12/26/2022 at 11:54 • 0 commentsAs I was travelling, I left my Mercury board behind, but I had a older Digilent BaSys2 FPGA board at hand so I modified the design to fit:
- FPGA chip is more modest so I disabled the whole VGA subsystem (VGA controller + video RAM + TTY circuit would not fit)
- There is no separate RESET button, it is not of much need but press on 4 buttons at the same time causes reset
- 7seg display segments were ordered differently so they needed to be reshuffled to show correct digits / letters
- There are 8 LEDs on the board, I used them to display dbg_mem and dbg_ram - not much use, but some "blinkenlights" are always good :-)
The top level project source code file is here, and the pic of working board (with first Fibonacci numbers sent to UART) below:
![]()
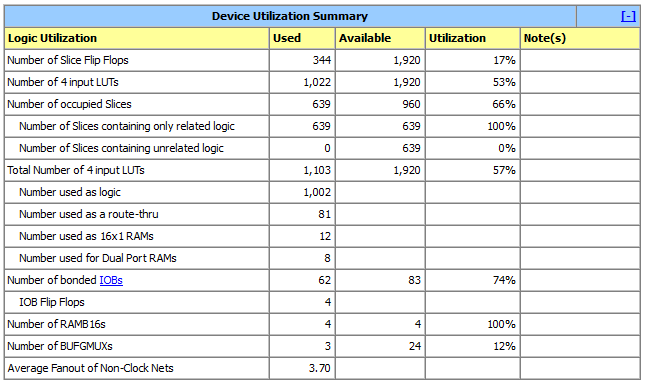
Because this pretty much bare-bones EMZ1001A + 1k internal + 1k external ROM, it illustrates the amount of FPGA resources usage. Such modest usage would allow embedded EMZ1001A to be used as simple controller in other FPGA-based designs when 8-bit cores can be an overkill:
![]()
-
Test code - Fibonacci sequence generator
12/12/2022 at 05:46 • 0 commentsWhy Fibonacci sequence? The algorithm is simple enough to fit into code and data memory, and allows to test lots of the processor functionality:
- LED display and refresh, with DISN (display numeric) mode
- OUT 8-bit values (generating ASCII text stream for VGA and UART)
- Simple arithmetic (BCD additions)
- 1 second timer
- Subroutine calls over different pages, including "default" page 15
Description below refers to the code here, note that line numbers and labels may differ as I still tweak the program a bit.
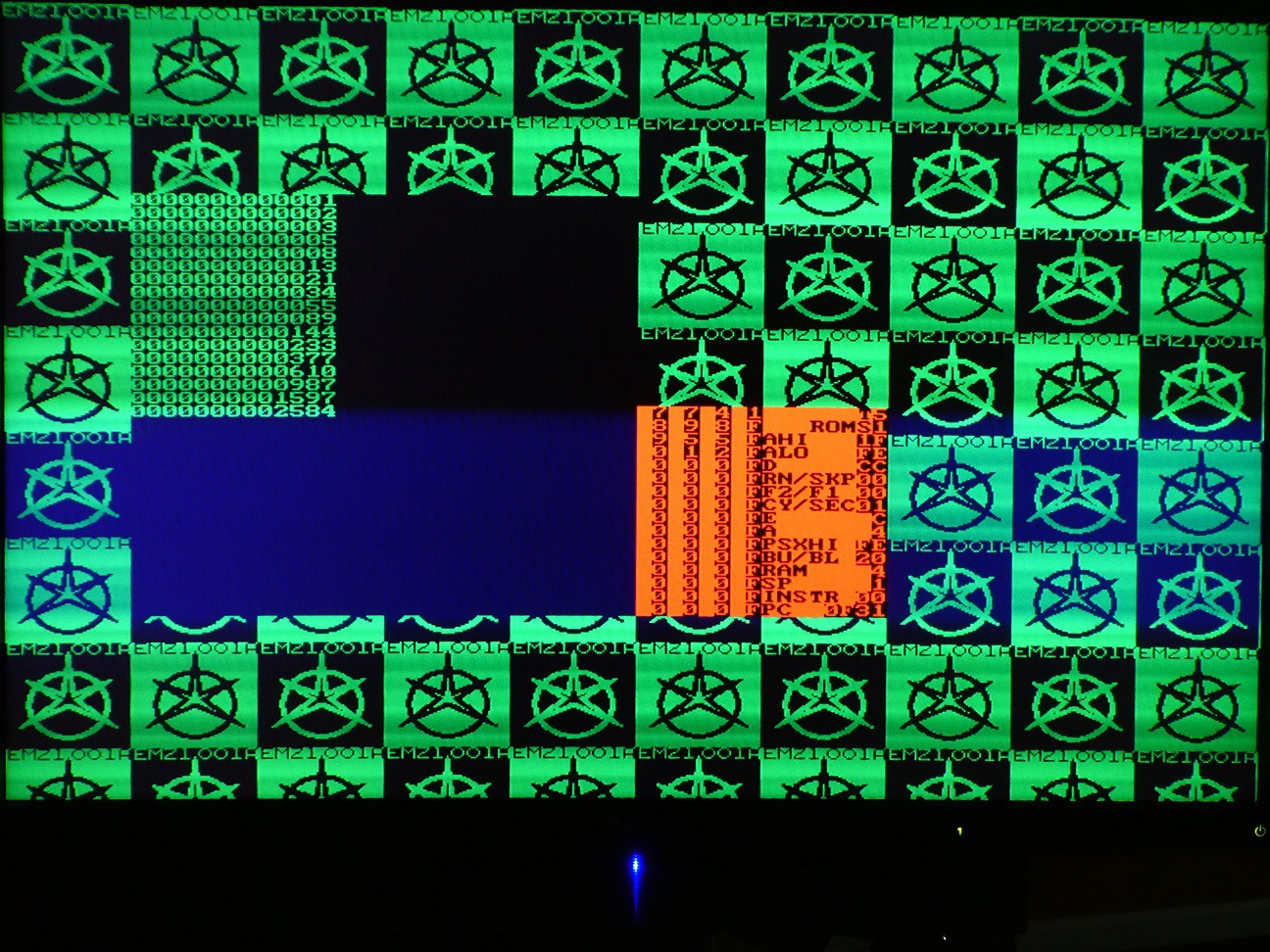
The most common application of EMZ1001A were in small appliances or devices with simple capacitive keyboard and few LED 7-segment digits (for example, a microwave oven, digital scale etc.). For these to be useful, LED display must at all times display some correct data continuously. Interrupts do not exist, instead the display refresh is the main loop of the program, and everything else that needs to happen must be done within that dead loop (old calculators worked the same way, that's why during calculation their display was momentarily blank or scrambled).
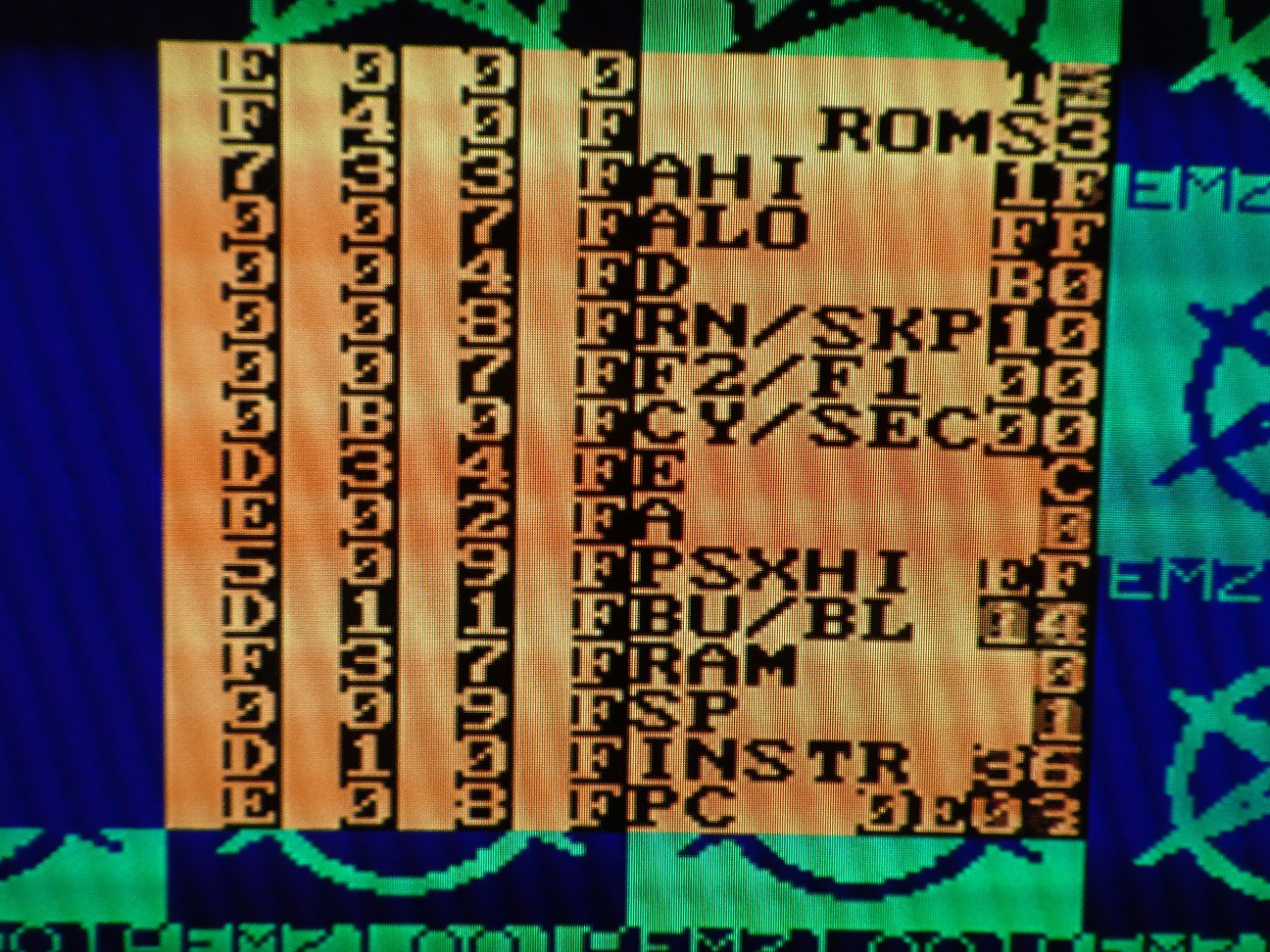
LED display can be only driven from RAM location, so at the time of LED display update RAM must contain valid data, in this case a valid Fibonacci number in the sequence. It is held in bank 2 (used for display), and previous 2 numbers are in banks 0 and 1. The debug display on VGA illustrates the placement of data (8+13 = 21):
![]()
So the algorithm is:
- Initialize the processor
- clear bank 0 (column 0 in the pic, now contains 0000000000000000)
- clear bank 1
- flip LSBit of LSDigit in bank 1 to 1 (so it now contains 0000000000000001)
- Add banks 0 and 1 and store to bank 2 (BCD add)
- Display bank 2
- Go back to step 6 and refresh LEDs until 1s tick is detected
- copy bank 1 to 0 and 2 to 1 (so we have always the previous 2 numbers in banks 0 and 1)
- go to step 5
- BUG: I wanted to detect carry from MSDigit to restart from 0 but somehow it is missed so it continues indefinitely generating last 13 valid Fibonacci decimal digits)
While the processor is relatively simple, it does have some clever capabilities that can be used to accomplish some tasks efficiently. Few highlighted below.
Looping over RAM locations
64 nibbles can be thought as a 2D 4*16 array, addressed by BU (2 bit) and BL (4 bit) registers. Loops can be started at any BU and BL either 0 or 15 and then traversed towards the opposite end. End condition is baked in into the instruction based on the direction of the BU increment/decrement direction. Example:
DEADLOOP: LBZ 0; // select RAM column 0, row 0 JMS CLEAR; // clear RAM column 0 LBZ 1; // select RAM column 1, row 0 JMS CLEAR; // clear RAM column 1 (omitted) // --------------------------------------------------------------------------- .org 0b1111000000; // Page 15 in the bank is the default place for subroutines // --------------------------------------------------------------------------- CLEAR: LAI 0; // A = 0, BU set by caller XCI 0; // Exchange with M[BU, BL], BU = BU, BL++ JMP CLEAR; // repeat until all covered (BU = 0) RT; // backEfficient and fast subroutine calls
Program memory can be up to 8k (13-bit address), but JMS instruction has only 6 - where does the rest come from? Best if from nowhere (it is implied) - unless PP was executed before (to change the page), JMS will jump to [curent bank][page 15][6-bit destination]. Storing entry points of subroutines on page 15, and only if that page does not have enough space (1 page = 64 locations), branching with PP + JMP to the final destination. Example:
(on page 0) ADDLOOP: JMS BCDADD; // RAM[2,*] = RAM[0,*] + RAM[1,*] (on page 15) BCDADD: LBZ 0; // BL = 0, BU = 0 RSC; // clear carry ALOOP: LAM 0b01; // A = M[0, BL], BU = 1 ADCS; // C,A = A + M[1, BU] + C JMS V16_TO_18; // carry set JMS V0_TO_15; // carry not set XAE; // save A in E LAI 2; // A = 2 XABU; // BU = 2 XAE; // restore A XCI 0b10; // M[2, BL] = A, BU = 0 JMP ALOOP; // repeat until all 16 digits RT; // doneSimilar to Intel 8008, stack is built into the processor (3 levels, but this implementation has 4 as that is easier to implement). Actually, there is no stack, but a memory block of 4 13-bit locations, and the 2-bit stack pointer selects one of them which is used as program counter; JMS and RT increment/decrement this pointer.
Jumping over RAM banks
In a single instruction of type XC* not only BL can be incremented / decremented, but next bank can be different or same using a simple 2-bit XOR trick: new BU = old BU xor instruction[1:0].
Example SHIFT0: banks will be:
After LBZ .... 1
After LAM .... 0
After XCI ... 1
(loop back to LAM so again 0/1, 0/1)
Example SHIFT1: banks will be 2/1, 2/1 ...)
SHIFT0: LBZ 0b01; // row (BL) = 0, col (BU) = 1 SHIFT0LOOP: LAM 0b01; // A = M[1, BL], BU = 0 (LSB flipped) XCI 0b01; // exchange with M[0, BL], BU = 1 (LSB flipped back), BL++ JMP SHIFT0LOOP; // repeat until all moved from column 1 to 0 RT; SHIFT1: LBZ 0b10; // start with column 2 SHIFT1LOOP: LAM 0b11; // switch to column 1 (both bits flipped!) XCI 0b11; // switch back to column 2 JMP SHIFT1LOOP; RT;7-seg LED display using DISN instruction
EMZ1001A has everything needed to drive 7-seg displays (actually 8, as DP (decimal point) dot can be driven too) of up to 13 digits. DISN instruction will "lookup" the pattern for hexadecimal digits 0-F in the internal ROM which will be output to D6..D0 and carry flag will directly drive D7 (decimal point). In the CPU logic:
... -- seven segment pattern for DISN instruction constant sevseg: mem16x8 := ( "01111110", -- 0 "00110000", -- 1 "01101101", -- 2 "01111001", -- 3 "00110011", -- 4 "01011011", -- 5 "01011111", -- 6 "01110000", -- 7 "01111111", -- 8 "01111011", -- 9 "01110111", -- A "00011111", -- B "01001110", -- C "00111101", -- d "01001111", -- E "01000111" -- F ); ... disn_out <= eur_invert xor (mr_cy & sevseg(to_integer(unsigned(mr_a)))(6 downto 0)); -- combine carry with lower 7 bits of 7seg lookup ...A(address) and D(ata) lines driving 7-seg are also used for accessing external ROM, so there is lots of multiplexing:
Code T1, T3 (SYNC low) T5, T7 (SYNC high) common anode PSH to set pin A[BU] high, others low
EUR bit 0 set to 1 to not invert D (default)drive LEDs only when not in test mode, using internal ROM and not in multiplexed mode (PSH with BL 14) drive LEDs in all modes except test and if not in D float mode (PSL with BL 14) common cathode PSL to set pin A[BU] low, others high
EUR bit 0 set to 0 to invert Ddrive LEDs only when not in test mode, using internal ROM and not in multiplexed mode (PSH with BL 14) drive LEDs in all modes except test if not in D float mode (PSL with BL 14) Fibonacci code is in external ROM and the board uses "inverted common anode" so the bolded combination is set up by the program. Simple logic detects external ROM use during SYNC low and blanks the display.
-- when using external ROM, prevent A and D messing up the LEDs when SYNC is low blank <= not (SYNC or sw_internalrom); DOT <= D(7); A_TO_G <= D(6 downto 0); AN <= "1111" when (blank = '1') else A(3 downto 0);Now for some pains:
- No built-in BCD arithmetic (neither lame Intel 8080 DAA, or clever 6502 D-flag)
- No comparisons! To check A[ccumulator] against a value, either complement addition must be used (which is subtraction), or value added to "check if >15". For RAM, individual bits can be checked and convoluted skip sequence used to find out which bit combination is present.
This pain can be seen in the BCD addition loop. Digits from banks 0 and 1 are added and stored to bank 2, but each stored value has to be corrected depending if it was greater than 15 (carry in this case is equivalent to 8080 H-flag, consumed by DAA instruction), or if between 10 and 15 - both of these require correction of adding 6 and setting of carry flag (which is now decimal, not binary carry)
BCDADD: LBZ 0; // BL = 0, BU = 0 RSC; // clear carry ALOOP: LAM 0b01; // A = M[0, BL], BU = 1 ADCS; // C,A = A + M[1, BU] + C JMS V16_TO_18; // carry set JMS V0_TO_15; // carry not set XAE; // save A in E LAI 2; // A = 2 XABU; // BU = 2 XAE; // restore A XCI 0b10; // M[2, BL] = A, BU = 0 JMP ALOOP; // repeat until all 16 digits RT; // done V0_TO_15: XAE; LAE; // E = A ADIS 6; // Classic DAA adjust JMP BCDCARRY; // carry set, adjustment was needed, A is correct BCD XAE; // carry not set, adjustment was not needed, restore A RT; BCDCARRY: STC; RT; V16_TO_18: ADIS 6; // 0x12 + 6 + 1 becomes 0x18 etc., carry remains set NOP; STC; // decimal carry forward RTS; // skip next -
Test code - "HELLo WorLd!"
12/12/2022 at 05:43 • 0 comments(Refer to "Hello World!" example in EMZ1001A assembler for code discussion below)
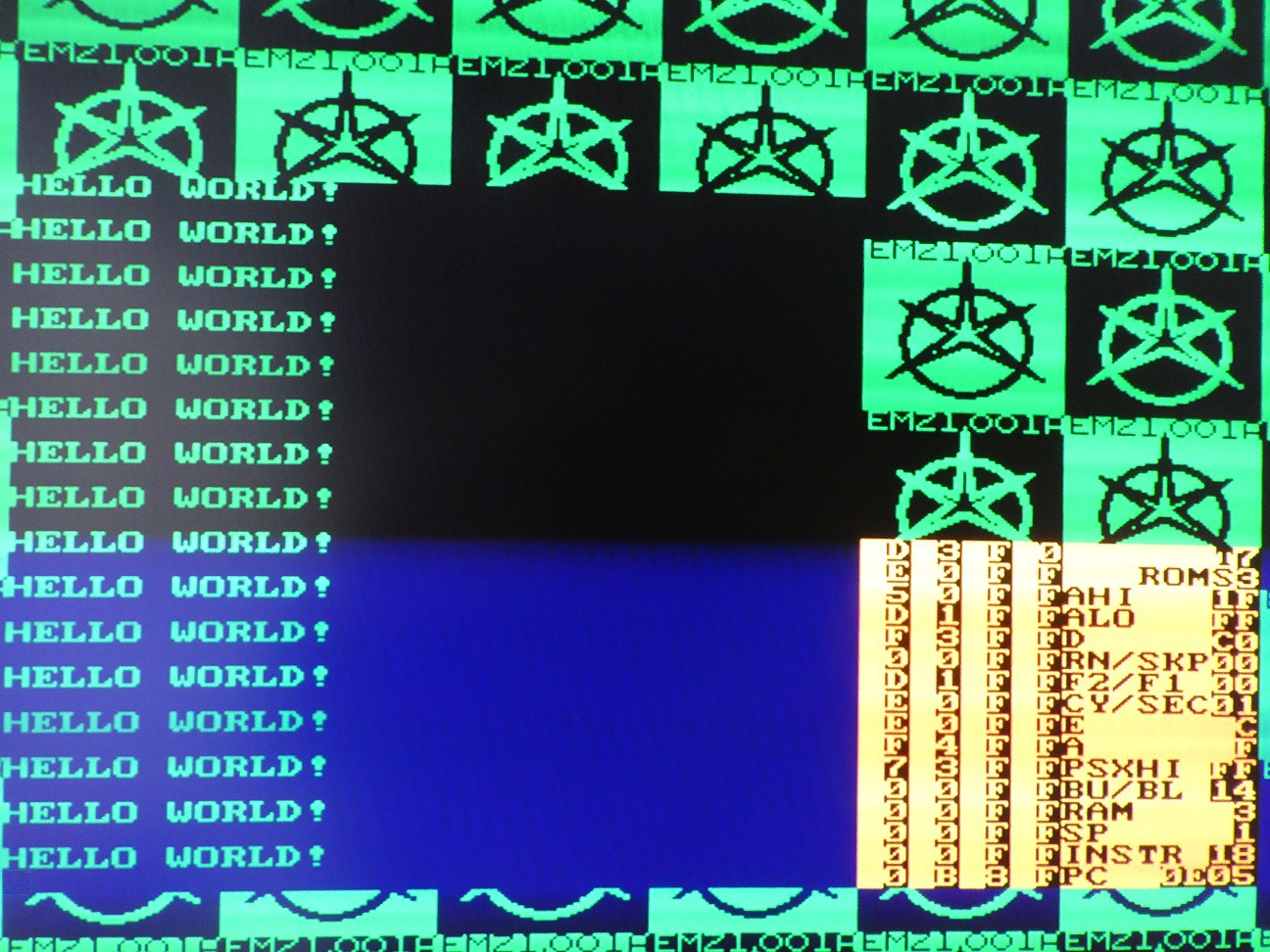
"Hello World" is expected to show case any new programming language, and EMZ assembly has been resurrected along with the "chip" so it seemed perfect to use it as a default "firmware" that goes inside the 1k ROM.
It simply rotates (in 1 sec intervals) the text on 7seg LED display (DISB instruction), and outputs the ASCII character sequence (plus CR and LF) using OUT instruction. Algorithm is:
- Initialize operating modes (most important is to not float D lines to be able to drive TTY and UART inputs)
- Initialize RAM with the 7seg LED patterns of "HELLo WorLd!" string - this is 12 characters, so remaining 4 are set to zero (no segment lit up)
- Output "HELLO WORLD!" to UART and TTY (each character is a JMS call to a character-specific entry point)
- Refresh the LEDs (run DISB in loop for all BU values)
- Check if 1 second has expired, if no go to step 4 (this keeps LEDs lit!), otherwise continue
- "rotate" values in RAM banks 0 and 1 - this achieves the "scroll every 1s" effect
- go back to step 3 for infinite loop
Weird but clever LAI
As per documentation, only first LAI (Load Accumulator Immediate) instruction in a sequence is executed. There is an internal flag which is set by LAI and reset by any other instruction, and if true, LAI becomes a NOP. This strange but simple trick allows easy implementation of multiple entry points into a subroutine, while saving many instructions jumping over the alternate paths:
GREETINGS: LBZ 0b11; // BU = 3, BL = 0 JMS CRLF; // empty line JMS H; // output character by characted on D port, with nEXT strobe JMS E; JMS L; JMS L; JMS O; JMS SPACE; JMS W; JMS O; JMS R; JMS L; JMS D; JMS EXCPOINT; JMS CRLF; ... H: LAI 0x0F & 'H'; // using EMZ1001A trick that in a sequence of LAIs only 1st one is executed! E: LAI 0x0F & 'E'; L: LAI 0x0F & 'L'; O: LAI 0x0F & 'O'; D: LAI 0x0F & 'D'; OUT_4: RSM 3; // high nibble is 0b0100 for these ASCII codes STM 2; JMP OUT_xx00;4 JMP instructions are saved in the sequence above. In additional trick, characters are grouped by value of upper nibble of ASCII code, and convenient RSM (reset memory bit) and STM (set memory bit) can directly update RAM without disturbing the A register.
OUT instruction - simple but effective
Both DISB and OUT output 8-bit data on the D bus - when not in float mode and not multiplexed for use as ROM data inputs. The difference is strobing:
- OUT - nEXT goes low during T7
- DISB - nEXT stays high, but A strobes the LED digit (high or low)
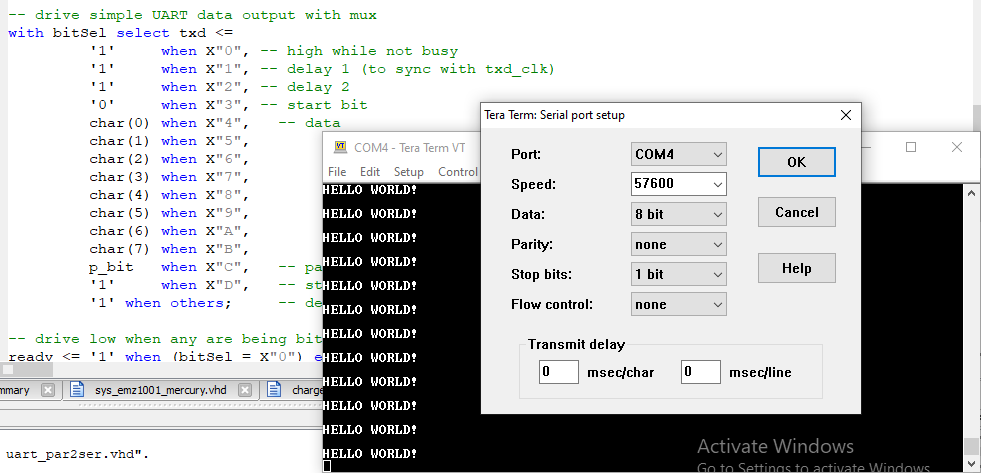
Both TTY (to VGA) and UART (parallel to serial) take 8-bit ASCII data, so their input is connected to D, and strobe (inverted) to nEXT. That means 1 OUT sends ASCII character simultaneously to both with the effect of "print" (even a simple unidirectional Centronics interface could be added for a real print), but only if they are both ready as sensed by input line I0 (there is no FIFO buffer between CPU and output devices, so the output speed is effectively limited by baudrate / 16).
CRLF: LAI CR; JMS OUT_0; // old assembly trick LAI LF; OUT_0: RSM 3; // set current RAM location to 0 RSM 2; OUT_xx00: RSM 1; OUT_xxx0: RSM 0; UART_OUT: OUT; UART_WAIT: LAI OUT_READY; // connected to pins 0, 1 of I inputs SZI; // skip if low RT; // signal high, ready JMP UART_WAIT; // signal low, not readyNote: more optimal implementation would first check for readiness and then if ready proceed to OUT and return - this way fewer instructions after RT would be blocked, and a simple "parallelization" of CPU operation and 2 output devices operations could be achieved.
![]()
DISB - any pattern to LEDs
Somewhat readable text can be represented on 7-segment LED with a certain "font" but that requires each segment to be driven independently. DISB has same multiplexing rules like DISN but directly connects A to D3-D0 and RAM[BU, BL] to D7-D4. The patterns for LED characters are stored in banks 0 (LSN) and 1 (MSN) so A value has to be picked up from bank 0 in each iteration to combine with bank 1:
// --------------------------------------------------------------------------- .org 0b1110000000; // Page 14 in the bank is for the subroutines overflow // ---------------------------------------------------------------------------- DISP_LED_: LAI 12; // start displaying at digit 12 XAE; // LBE 0b00; // BL = 12, BU = 0 LEDLOOP: LAM 0b01; // A <= M[0, BL], BU = 1 DISB; // direct pattern to D outputs (inverted) PSL; // prepare digit low (on) MVS; // update A pins (A[BL] <= '0') NOP; // delay to keep it lit for a bit NOP; PSH; // prepare digit high (off) MVS; // update A pins (A[BL] <= '1') LAM 0b00; XCD 0b01; // next, change column to 0 JMP LEDLOOP; RT;The only remaining piece for scrolling LED display is "rotating" RAM by 1 location in bank 0 and 1 (in sync). This is extremely efficient due to XCI instruction which combines 3 reads, 3 writes, 1 increment and one skip in one 6-bit op-code! The instruction set is really optimized for the processor architecture and multiplies its capabilities.
// --------------------------------------------------------------------------- .org 0b1111000000; // Page 15 in the bank is the default place for subroutines // ---------------------------------------------------------------------------- ROTATE: LAM 0b00; // A = M[x, 15] XCI 0b00; // BL is now 0 NOP; ROTLOOP: XCI 0b00; // deposit from previously visited memory cell, increment BL JMP ROTLOOP; // continue until all visited RT;Effect of running ROTATE on banks 0 and 1 can be seen here (note how 73 (pattern for H) moved "down" 2 locations after 2 calls to ROTATE, meaning H (and rest of text) moved left):
![]()
![]()
The worst about EMZ1001A instruction set is...
... lack of read-only data in program memory (ROM). Using various look-up tables (if there is enough memory for them) can speed up and simplify code significantly. Unfortunately EMZ1001A has no way to pick up any data from ROM and deposit it into the RAM or outputs etc. This means that initializing RAM banks 0 and 1 with 16 LED character patterns had to be done by executing LAI + XCD (exchange with RAM and decrement BU) 32 times. Some optimizations could be possible but that would make the code even more unreadable.
// --------------------------------------------------------------------------- .org 0b1101000000; // Page 13 for more subroutines // ---------------------------------------------------------------------------- INITLED1_: LBF 1; // RAM bank 1 holds lower nibble of LED patterns JMS CLEAR4; // clear locations 15, 14, 13, 12 LAI LED_H / 16; // store and decrement BU, leftmost is H (location 12) XCD 0b00; LAI LED_E / 16; XCD 0b00; LAI LED_L / 16; XCD 0b00; LAI LED_L / 16; XCD 0b00; LAI LED_O / 16; XCD 0b00; LAI LED_SPACE / 16; XCD 0b00; LAI LED_W / 16; XCD 0b00; LAI LED_O / 16; XCD 0b00; LAI LED_R / 16; XCD 0b00; LAI LED_L / 16; XCD 0b00; LAI LED_D / 16; XCD 0b00; LAI LED_EXCL / 16; // rightmost is ! (location 0) JMP INIT_DONE; // store and return -
Recreating a simple EMZ1001A assembler
12/12/2022 at 05:40 • 0 commentsAny processor - no matter how simple or complex - is of little use if it cannot execute some program. I could not find any listing or ROM code for any EMZ1001A application, the closest was this note about using EMZ1001A as a DMTF frequency signal decoder. In addition, executing a program is the only way to test the instructions, so I decided to write 2 "apps" to validate the processor and demo it.
Next problem was lack of development toolchain. AMI documentation describes a sophisticated development system that includes hardware and software - with a macro-assembler. Even if this could be found today, it would be not practical to integrate with PC-based FPGA toolchain, so only option was to write own.
One approach would be to leverage already existing tools, for example a universal cross-assembler. Then I realized, I already have written one myself - my micro-code compiler!
How does a 2-pass microcode compiler become a 2-pass assembler? Not easily, except for lucky coincidence that EMZ1001A uses only 8-bit op-codes, which is exactly the same as horizontal microcode, where each microinstruction has exactly the same width (usually 20 bits +), and the number of microinstruction formats is very limited (often times, only 1 format, meaning each field in microinstruction has same meaning in each microinstruction).
Microcode compiler allows defining multiple fields in the microinstruction (from emz.mcc include file):
// define any slices of the instruction word format f76 .valfield 2 values * default 0; f54 .valfield 2 values * default 0; f32 .valfield 2 values * default 0; f10 .valfield 2 values * default 0;With these 2-bit fields, EMZ1001A instructions formats can be expressed as:
Format Layout o - opcode bit
U - operand bit that must appear inverted in code
X - operant bit that must appear not-inverted in code
Sample instructions .mcc definition 8+0 oooooooo NOP...DISN opr8 .valfield f76 .. f10 values * default 0; 6+2 ooooooUU SZM, STM, RSM, LB* opr6 .valfield f76 .. f32 values * default 0;
val2 .valfield f10 .. f10 values * default 0;6+2 inverted ooooooUU XC*, LAM opr6 .valfield f76 .. f32 values * default 0;
val2 .valfield f10 .. f10 values * default 0;4+4 ooooXXXX LAI, ADIS opr4 .valfield f76 .. f54 values * default 0;
val4 .valfield f32 .. f10 values * default 0;4+4 inverted ooooUUUU PP opr4 .valfield f76 .. f54 values * default 0;
val4 .valfield f32 .. f10 values * default 0;2+6 ooXXXXXX JMP, JMS opr2 .valfield f76 .. f76 values * default 0;
val6 .valfield f54 .. f10 values * default 0;To differentiate between inverting and non-inverting formats, simply the "macro" includes the ! symbol which will appear before the operand and result in inverted bits in the binary:
// 2-bit operand, inverted (0x30 .. 0x3F) XCI .alias opr6 = 0b001100, val2 = 3 & !; XCD .alias opr6 = 0b001101, val2 = 3 & !; XC .alias opr6 = 0b001110, val2 = 3 & !; LAM .alias opr6 = 0b001111, val2 = 3 & !; // 2-bit operand, not inverted (0x40 .. 0x4F) LBZ .alias opr6 = 0b010000, val2 =; LBF .alias opr6 = 0b010001, val2 =; LBE .alias opr6 = 0b010010, val2 =; LBEP .alias opr6 = 0b010011, val2 =;With this, it is possible to easily define each EMZ1001A instruction and write assembly code similar to the original (main difference is that each line must end in ; and that the comment character is different //)
In summary, I had to make 3 changes to existing microcode-compiler:
- Support the include directive so I can include the definition of fields and instructions in each assembly program (implementation line 467+: #include simply recursively calls the Pass0() in which it has been encountered)
- Fix various bugs in the field definitions when "virtual" fields contain one or more "real fields" (in this example fields f76..f10 are real, but opr8 which spans all of them is virtual. Values can be assigned only to one within the instruction)
- Allow to use file extension names beside .mcc (so the "apps" have extension .emz for convenience)
- Support more expressions and their evaluation. Implementation can be seen in lines 140+ in the monster GetValueAndMask() function - it is a great example how external pressures can lead to bad code. I wanted to move along with the project, so instead of rewriting into a well-known single or double stack based evaluation algorithm, I modified existing function to call itself recursively until reaches a leaf node which is either <constant> or <constant><operator><constant>. Recursive algorithm is much worse because at each level it partially reparses the expression.
With a working assembler, the toolchain becomes simple:
- Write .emz assembly file in any editor, include emz1001.mcc
- Compile with commands similar to:
@echo off @echo -- Compile code for internal and external ROMs @echo See https://github.com/zpekic/MicroCodeCompiler ..\..\..\Sys9900\mcc\mcc\bin\Debug\mcc.exe /a:emz Fibonacci.emz ..\..\..\Sys9900\mcc\mcc\bin\Debug\mcc.exe /a:emz HelloWorld.emz @echo -- Convert image into 8*8 pixel character generator ROM @echo See https://github.com/zpekic/Sys_TIM-011/tree/master/Img2Tim ..\..\..\Sys_TIM-011\Sys_TIM-011\Img2Tim\Img2Tim\bin\Debug\img2tim.exe ..\doc\iskra-logo.bmp -x -c
- If successful, .hex file will be generated describing the binary
- Feed the .hex file path in the ROM definition as a generic parameter in the VHDL project:
-- 1k of internal ROM contains the "Hello world!" program firmware: rom1k generic map( filename => "..\prog\helloworld_code.hex", default_value => X"00" -- NOP ) port map( D => introm, A => pc, nOE => '0' );Note: Xilinx (now AMD) as Intel competitor of course does not support natively loading .hex files during build time, but a simple file reader included in the project package file (see init_filememory() function) I wrote is sufficient.
-
Implementation in VHDL - structure and timing
12/12/2022 at 05:39 • 0 commentsEMZ1001A microcontroller implementation is contained in 2 VHDL source files:
- emz1001_package.vhd - contains definitions of types (e.g. memory "formats") and functions used in more than one place in the design. The main helper here is a rudimentary Intel .hex file reader that allows memory initialization during build time (so that the memory image with proper content is included in the .bit stream uploaded to FPGA)
- EMZ1001A.vhd - contains all of the processor logic
As of 2022-12-20, everything described in Iskra / AMI documentation is implemented, except:
- BRK instruction (op code 0x01) - I could not find info what did it do in real device, so right now it is doing a NOP
- KREF signal - this is of little use on this purely digital system with no analog components. However, it could be implemented by emulating KREF and Kx signals as PWM and then comparing duty cycle ratio between them and if Kx >= KREF, Kx would read as 1
- Test mode - when ROMS is fed back with negated SYNC, CPU enters test mode which outputs on D lines content of internal ROM. Of great use on "black box" real device, it is of little use here when all the guts of the microcontroller are wide open, including the firmware ROM content placed there
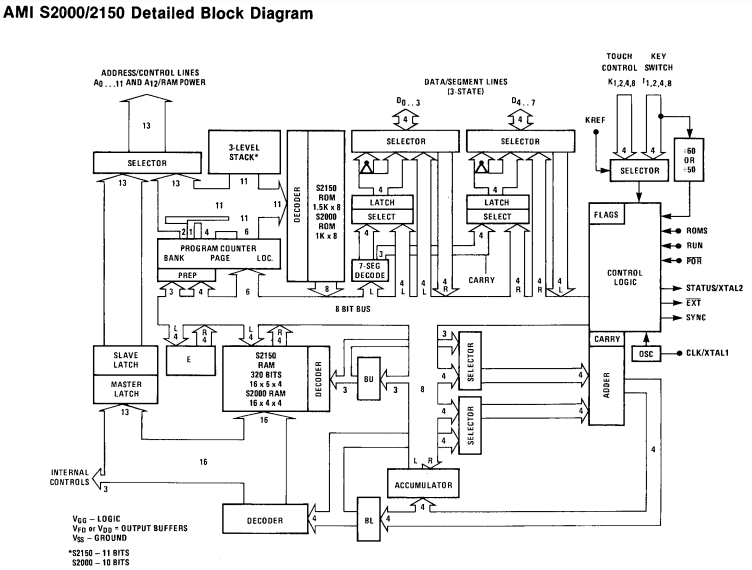
The "detailed block diagram" from the documentation is not extremely helpful with recreating the device, but still gives some useful hints.
![]()
- A lines are complex - they are either data outputs from a cascade of 2 13-bit latches, or output 13-bit instruction address if accessing external memory
- D lines are even more complex - there are 2 output modes (OUT / DISPx) and 2 input modes (INP and reading instruction from external memory), all dependent of CPU mode of operation, SYNC state and instruction
- Stack depth is 3 (or 4), but width is only 10 bits - 3 bits to select 1k bank are not on the stack. This means that it is possible to JMP from bank to bank, but not JMS (you can go, but can't return :-))
- PP staging registers (page, bank, and which one is next to be updated) are indicated with "PREP" on the diagram
- Some internal paths are 8-bit which is interesting for a 4-bit CPU as it allows higher internal bandwidth for simultaneous execution of multiple operations
Timing
EMZ1001A has a very rigid timing: all instructions are executed in 1 machine cycle, machine cycle has always 4 clock cycles (T1, T3, T5, T7) and 2 phases (SYNC low - instruction fetch, and SYNC high - instruction decode). Implementation presented here is cycle accurate and follows the real device based on what I could infer from documentation. 2 outside clock sources are consumed, which drive 3 "processes" (VHDL term for defining how registers are updated):
Clock CLK (CPU operating frequency) I3 (assumed to be A/C mains 50Hz or 60Hz) low to high transition capture state of RUN, K, I inputs during cycles T3, T5, T7 respectively
on_clk_up: process(CLK, nPOR)count up until limit set by EUR is reached at which point set a flag that can be consumed by SOS to skip
on_i_clk: process(nPOR, i_clk, sos_clr)high to low transition Advance through T1, T3, T5, T7 cycles (using a 1-hot ring counter) and tie almost all of internal register updates based on cycle, run mode, current instruction
on_clk_down: process(CLK, nPOR)N/A async (reset condition) Initialize internal registers (except 64 nibble RAM) clear counter on reset, clear flag on reset and SOS execution Main action is in the on_clk_down: process(CLK, nPOR). RUN and SKIP indicate the states of ir_run and ir_skp flags.
Always RUN RUN NO RUN NO RUN At the end of: SKIP NO SKIP SKIP NO SKIP T1 Capture ROMS state in the middle of SYNC low - - - - T3 - Load instruction register with NOP (0x00) Load instruction register from ROM(PC) - - T5 Capture ROMS state in the middle of SYNC high Update skip flag
Increment PC
Execute NOPUpdate skip flag
Increment PC
Execute all instructions except JMP, RT, RTS
JMS: increment stack pointer- - T7 - - JMP and JMS: update PC based on 6-bits in the instruction and state of PP prepared registers
RT, RTS: decrement stack pointer- - Some notes:
- PC never actually "skips" - lower 10 bit always increment by 1, SKIP is just "force feeding" instruction register (ir_current) with NOP, so skipping means execute a NOP instead of next instruction
- When JMS increments stack pointer (ir_sp) at the end of T5, the PC already advanced by 1, meaning that the stack level below will contain the right return address which is 1 + current PC
- JMP and JMS executed at end of T7 have almost same logic, but JMP will "overwrite" PC in current stack level, while JMS will do so for the "new" level, because ir_sp has already been incremented. The difference in logic is that if page register is not set, JMS will go to page 15, and JMP will stay on same page
- There is no difference between RT (return) and RTS (return and skip) from process perspective, both just decrement the stack pointer.
- Skip state left from previous instruction is consumed at T3 and new skip state is set at end of T5. This ensures that correct value of SKIP flag is presented to STATUS output during T7 (same works for other 3 flag states STATUS brings out from the device)
-- STATUS is a 4 to 1 mux STATUS <= (t1 and (not mr_d_driven)) or (t3 and bl_is_13) or (t5 and mr_cy) or (t7 and ir_skp);- Capturing the state of ROMS pin during SYNC low and SYNC high into 2-bit ir_roms register is critical because it determines the microcontroller mode of operation:
-- decide if internal or external ROM is used with ir_roms select ir_introm <= not(ir_bank(2) or ir_bank(1) or ir_bank(0)) when "00", -- LOW, internal for bank0, external for others '0' when "01", -- SYNC, always external '1' when "10", -- /SYNC, not implemented test mode, assume "internal" '1' when others; -- HI, always internalA/C frequency timer
An interesting feature is a simple divide by 60 or divide by 50 timer which allows 1 second intervals to be measured in simplest way. It was probably added for apps where simple but not to precise clock is needed, like microwave, dishwasher, maybe a toaster oven.
- First, A/C input (through some galvanic decoupling and voltage limiting) must be connected to input I(3)
- Execute EUR with right values. These values are stored into a 2-bit register ir_eur, value of which is address to a lookup table that determined XOR mask and counter limit
... when opr_eur => -- EUR ir_eur <= mr_a(3) & mr_a(0); -- middle 2 bits are ignored ... -- EUR lookup constant eur_lookup: mem4x14 := ( O"73" & X"FF", -- 00 60Hz, inverting O"73" & X"00", -- 01 60Hz, not inverting (power-up default) O"61" & X"FF", -- 10 50Hz, inverting O"61" & X"00" -- 11 50Hz, not inverting );
3. When the counter reaches the limit, ir_sec flag is set, which is consumed as skip condition for SOS instruction. If set, SOS asynchronously resets this flag, allowing another 1 second to elapse and be detected.
-- 1 second timer logic sos_clr <= (ir_run and ir_sec and t7) when (opr = opr_sos) else '0'; on_i_clk: process(nPOR, i_clk, sos_clr) begin if ((nPOR = '0') or (sos_clr = '1')) then ir_sec <= '0'; if (nPOR = '0') then ir_cnt <= (others => '0'); end if; else if (rising_edge(i_clk)) then if (ir_cnt = eur_limit) then -- if 50 or 60 reached ir_cnt <= (others => '0'); -- reset counter ir_sec <= '1'; -- set 1 second flag else ir_cnt <= std_logic_vector(unsigned(ir_cnt) + 1); end if; end if; end if; end process;This is as close as EMZ1001A can get to timer interrupt - main loop of the program (e.g. updating LEDs, scanning keyboard) needs to run all the time, with SOS places somewhere in that loop to detect events 1 second apart.
-
System description
12/12/2022 at 05:38 • 0 commentsIn order to thoroughly test the EMZ1001A implementation, and to make a fun, demo-able system that is "doing something", a small "computer" has been created on the FPGA board, with various components supporting the microcontroller operation.
Basic features are:
- Execution of 2 pre-loaded programs ("Hello World" from internal memory and "Fibonacci" from external) - selectable by switch
- Output on 4-digit 7-segment LED (multiplexed using A[ddress] and D[ata] lines)
- Output of 8-bit ASCII (D[ata] lines, strobed with /EXT), these characters are simultaneously output to:
- 640*480 VGA which contains a 32*32 text screen (for "teletype" output) and 16*16 window to display debug info
- UART, which connected to PMOD USB allows host computer to receive output
- RUN/STOP, single step mode
- CPU clock selection from single step to 6.25MHz in 8 steps
- Baudrate selection from 600 to 57600 bps in 8 steps
- Debug info on VGA screen visualized 64 nibbles of RAM and other most important CPU registers
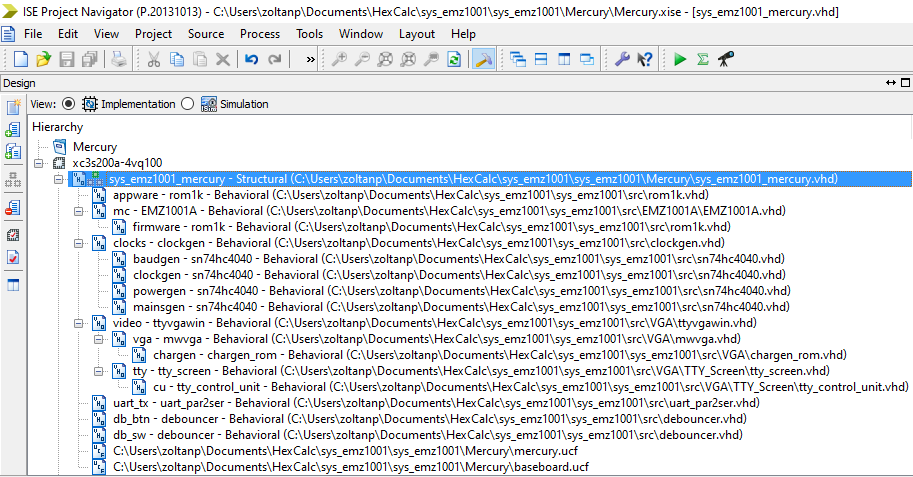
The system components are coded in sys_emz1001.vhd which is also the top level source file of the design:
![]()
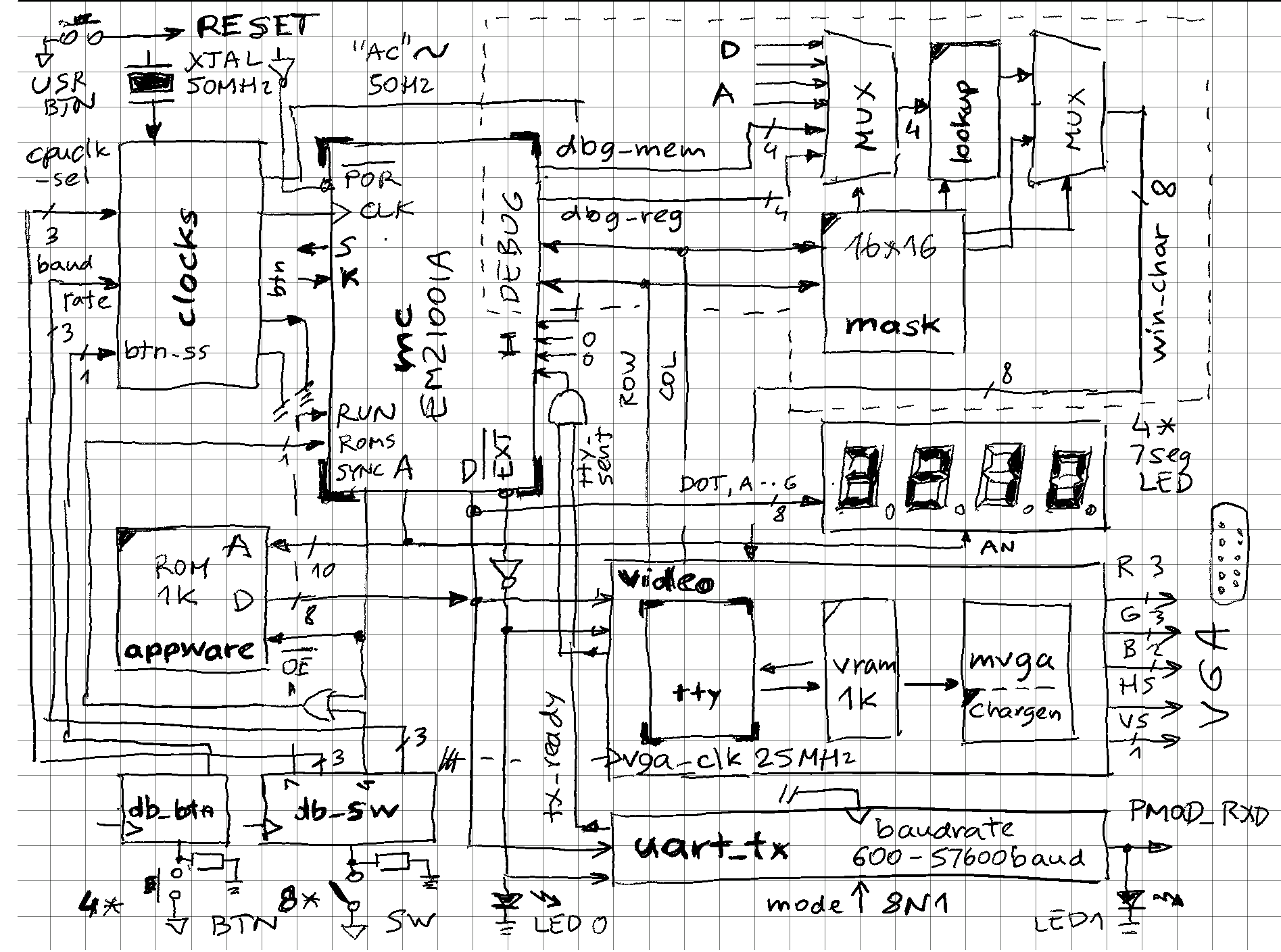
Somewhat simplified schema of main components (bolded names can be found in the code):
![]()
RESET
Mercury board has a USR_BTN which can be conveniently used as master reset. This is a positive logic signal, and is used as such by most components, except by the mc which has a negative active /POR (power on reset) signal.
clocks
Unlike many microcomputer designs which can get away with few clocks (e.g. classic Z80 with 4MHz XTAL and a 74LS04s to create a workable oscillator) this one uses many, all derived from internal Mercury FPGA 50MHz clock signal and generated by the clockgen.vhd component. Main are:
- 25MHz vga_clk - used as VGA dot clock
- cpu_clk which can go from single step (4 presses on BTN0 goes through T1, T3, T5, T7 phases of machine cycle)
- baudrate (600 - 57600 bps) - for UART
- 50Hz - simulate frequency of mains AC to be consumed by SOS instruction to time 1s intervals
- debounce_clk - drives the debouncers for switches and buttons
db_btn, db_sw
12 debouncers are programmatically generated during build time and hooked up to 8 switches and 4 buttons on Mercury baseboard. The debouncer.vhd is a glorified 8-bit shift register clocked by debounce_clk which "votes" the output based if all stages are in same state, and if not, keeps existing state. It is a very simple digital signal filter.
-- Switches on baseboard -- SW(0) -- BAUDRATE SEL 0 -- SW(1) -- BAUDRATE SEL 1 -- SW(2) -- BAUDRATE SEL 2 -- SW(3) -- OFF: EXTERNAL ROM, ON: INTERNAL ROM -- SW(4) -- CPUCLK SEL 0 -- SW(5) -- CPUCLK SEL 1 -- SW(6) -- CPUCLK SEL 2 -- SW(7) -- OFF: STOP, ON: RUN SW: in std_logic_vector(7 downto 0); -- Push buttons on baseboard -- BTN0 - single step (effective if SW(6 downto 4)) = "000" -- BTN1 - not used -- BTN2 - not used -- BTN3 - not used BTN: in std_logic_vector(3 downto 0);For example:
All switches off: 600 baud, external ROM (Fibonacci), CPU single step (using BTN0), stopped
All switches on: 57600 baud, internal ROM (Hello World), 6.25MHz CPU, running
appware
Simple 1k*8 ROM is mapped as lowest 1k out of 8 possible banks as "external ROM" and is holding the Fibonacci code. Same rom1k.vhd component is also used to define the "internal ROM" which lives inside the EMZ1001A, also in the first 1k memory bank.
Contents of ROM is initialized during build time, by loading the Intel .HEX file produced by microcode compiler (see "recreating a simple assembler"). This is done by invoking a function which returns a byte array of 1024 elements, defined in the emz1001_package.vhd file.
uart_tx
This is the "parallel to serial" half of a full UART - I use it often in projects to transmit to host PC, using USB to PMOD connector. It is hard-coded to 8 bits, 1 stop, no parity, but the baudrate can be selected using switches 2, 1, 0. Implementation-wise, it is a glorified 16 to 1 MUX. It also generated "ready" signal (low when transmit is in progress) which is fed to EMZ1001A input pin (I0) to check if it is ok to transmit next character.
video
Allows display of output ASCII stream and debug data (CPU internals) onto a text based VGA (640*480 == 80*60 characters). It is an aggregate of following components:
- tty_screen - a micro-coded component that accepts a stream of ASCII characters, and puts them into a video memory of a certain max width and height (32*32 in this case). It supports limited control characters such as CLS, HOME, CR, LF, and will scroll the screen if it hits the last row. For that is actually needs write access to video RAM, not just read (scroll origin register might be better implementation). Microcode can be seen here, rest of the files in this folder contain the standard microcode control unit, mapper and microcode memory and the main component integrating it together. Writing a character to video memory, incrementing cursor position, or scrolling take time so ready signal is generated and used in same way like the one from uart_tx (EMZ1001A program "blocks" until both output paths are ready for next character)
- vram - To save memory (design was getting close to what FPGA was able to contain), only 1k video RAM is used, in 32*32 configuration. It is used alternatively by tty_screen (when outside of visible VSYNC area), or VGA (when in visible area)
- vga - this is a simple, single format (60Hz, 640*480) only VGA controller. On one side it produces usual VGA signals for the monitor, and on the other row and column of the character being displayed. From this, the video RAM address can be calculated, for example A = (80 * row) + column, in case of 80*60, but here for 32*32 a simple concatenation of row & col will yield a 10-bit video RAM address. ASCII code retrieved from video RAM is used as a lookup into a character generator ROM. A single pixel is output from character generator based on the lowest 3 bits of vertical line number and lowest 3 bits of horizontal pixel position. Only 128 character definitions are stored (ROM size is halved to 1k) because bit 7 is used as "inverse".
mask
VGA controller generates character rows and columns - when these are within certain limits (see lines 390+) VGA input character no longer comes from video RAM, but from external source which is defined by the mask. Mask is 16*16, so first the offset into the mask is determined (from 0, 0 to 15, 15) and character code at that location is read. If is it printable ASCII code (32-128), then it is used directly, but if in range of 0-31, it is interpreted as driving a series of multiplexors that will select a 4-bit data from variety of sources (e.g. CPU memory or registers), convert 4-bit to ASCII character using 2 possible lookup tables, and feed that character to VGA. The end result is a "hardware window" of 16*16 size, "floating" above the rest of screen. Bit 7 (MSB) in the mask character is interpreted as "inverse" so it bypasses the MUXs and lookups and directly goes to VGA (see chargen explanation above)
![]()
(state of CPU stopped after generating 17th Fibonacci number displayed on VGA)
mc
Finally, the microcontroller! Internals are explained elsewhere, for the system purpose it is interesting to see its connections:
- CLK - comes from the clocks component which allows speed to be varied from 0 to dizzying 6.25MHz (originals worked only up to 250kHz or so)
- nPOR - reset is low active, so inverse of system RESET tied to USR_BTN
- RUN - tied to switch 7 which allows CPU to be stopped / started at flip of a switch
- ROMS - controlled by switch 4 which either pulls it up 1, or feeds back SYNC output. In first case CPU operation mode will be 11 (internal ROM only) and in second 01 (external ROM only). Given that these 2 ROMs contain the 2 different "demo" programs, they can be selected to run at flip of switch too.
- KREF - not used, in real device this is an analog input which is one side of 4 voltage comparator, the others are tied to 4 K inputs individually. Capacitor keyboards or even simple A/D converter can be implemented this way.
- I - 4 bit input bus has MSB connected to 50Hz signal (allows SOS instruction to measure 1 second intervals), and LSB to OR of two output devices (tty and uart) ready signals, so CPU can check if they are ready for next character
- nEXTERNAL - inverted and fed into two output devices to indicate they should load ASCII character present on D bus for output. OUT instruction puts combined M and A values to D bus and generates this signal. So single OUT sends both to VGA and UART at the same time.
- SYNC - used to drive ROMS, but also the 7-segment LED display. If using external ROM, address appearing on A lines during SYNC low would lit up random digits, so LED is blanked in that mode. If internal ROM is used, A is never multiplexed between address and slave output register, so no blanking is needed. That's why in internal ROM mode LED is a bit brighter :-)
- STATUS - not used, although data appearing on this output is correct per EMZ datasheets.
- A - either a 13 bit ROM address (if external ROM mode), or 13 bits coming from output slave register, updated using PSH, PSL, MVS instructions. In this case it a "one hot bit" to select single LED to light up (common cathode or anode). So theoretically 13-digit LEDs and 52-key keyboards (13 * 4 matrix) could be driven by a modest EMZ! In this design, lowest 4 A lines drive the anodes of the 4-digit LED display
- D - either 8-bit instruction from external ROM (in external mode, when SYNC is low, EMZ puts D in tri-state mode to allow ROM to drive it), or 8-bit input/output. In this design, only output data mode is used:
- OUT instruction - nEXTERNAL is generated, data is ASCII code to be output to VGA and TTY
- DISN instruction - internal 4-bit nibble to 7-seg pattern lookup table is used to drive 7-seg cathodes (decimal point comes directly from state of Carry flag) - nEXTERNAL is not generated, so random data won't get accidentally output to TTY and VGA
- DISB instruction - random 7-seg pattern from M and A (this is the way "text" can be displayed on 7-seg display). nEXTERNAL is not generated.
![]()
(banks 0 and 1 of internal RAM contain bit patterns to used by DISB to show "letters" on 7-seg display
LED_SPACE: .alias 0b00000000; // LED segment patterns LED_H: .alias 0b00110111; // H LED_E: .alias 0b01001111; // E LED_L: .alias 0b00001110; // L LED_O: .alias 0b00011101; // o LED_W: .alias 0b00111111; // close enough LED_R: .alias 0b00000101; // r LED_D: .alias 0b00111101; // d LED_EXCL: .alias 0b10110000; // ! (note decimal point is on) OUT_READY: .alias 1; // mask for I inputs
Iskra EMZ1001A - a virtual resurrection
4-bits wonder to print "Hello World!" and to calculate Fibonacci numbers to 13 decimal digits!