Erik Smit
Erik Smit-
2022-12-10
12/12/2022 at 13:20 • 0 comments- Communicated with project maintainer about some questions: https://www.pedelecforum.de/forum/index.php?threads/open-source-firmware-fuer-lishui-controller.61113/post-1971427
- Learned that the throttle and brake level need to be released after the autodetect procedure
- Added this to the EBiCS wiki: https://github.com/EBiCS/EBiCS_Firmware/wiki
- Added momentary switch for "brake".
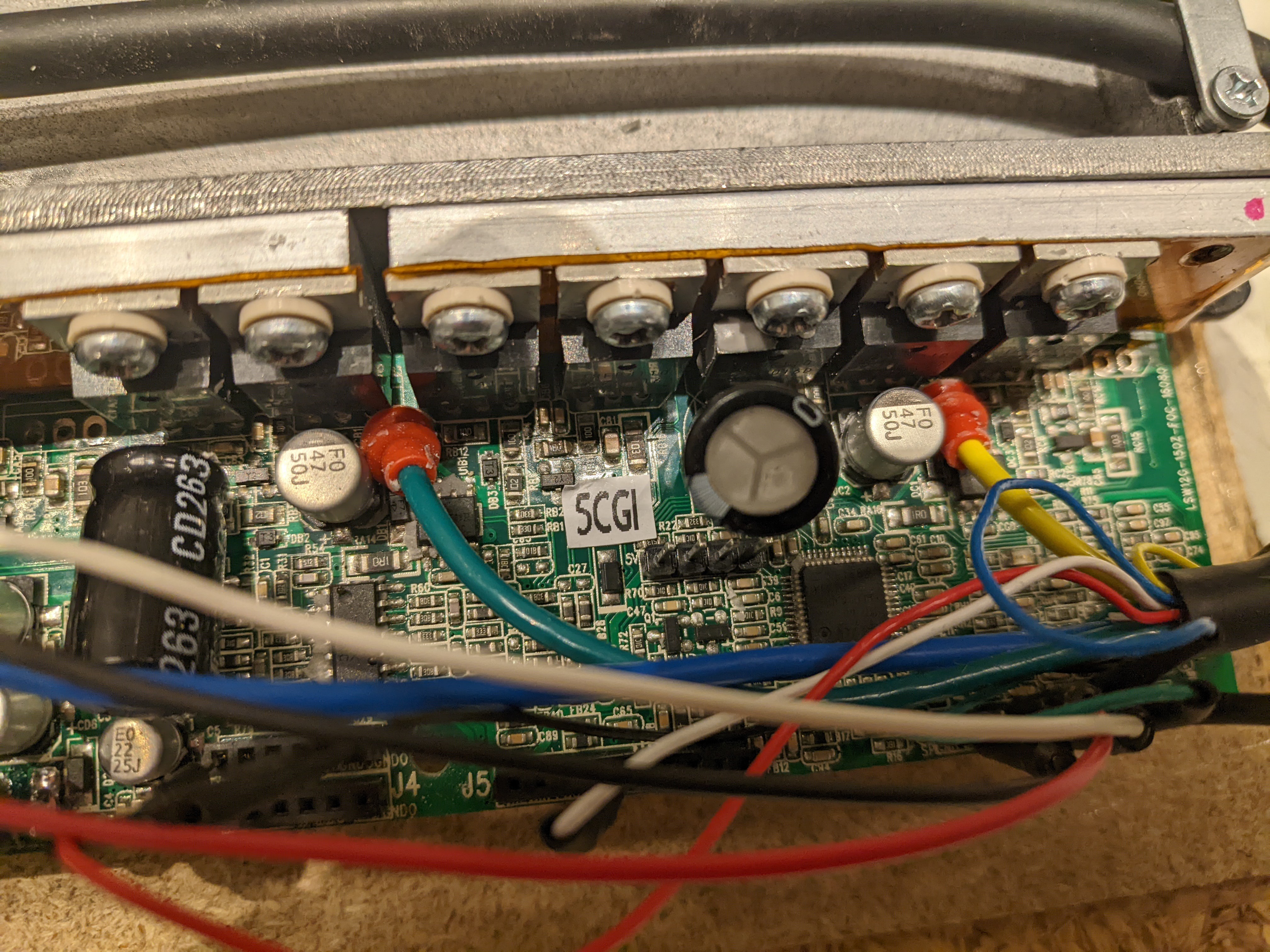
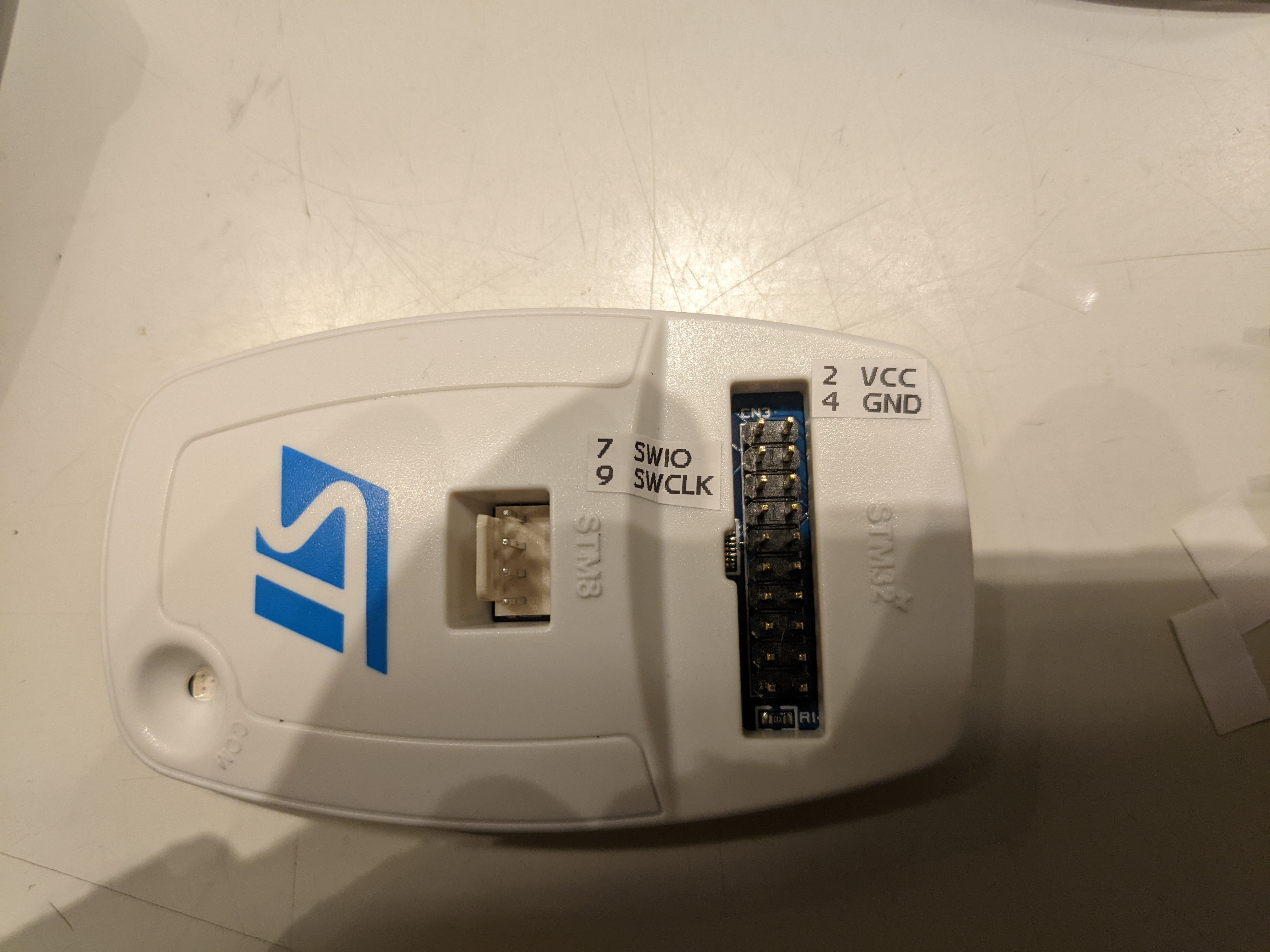
- Added labels to the headers to avoid having to search online for the pinout all the time.![]()
![]()
-
Progress so far
12/12/2022 at 13:07 • 0 commentsState so far:
- Built a wooden stand for the motor
- Powered the controller and display from RD6024 PSU.
- Generate a PWM from Arduino to simulate PAS sensor.
- Blew the RD6024 PSU when the motor stopped getting power and back EMF produced a spike.
- Repaired RD6024 PSU. Added diode in series to prevent the back EMF from blowing the RD6024 again.
- Blew the display when the motor stopped getting power and back EMF produced a spike.
- Depotted the controller for analysis.
- Figured out to turn on the controller with the SW pin to run controller without display.
- Replaced soldered connections with 2.0mm female headers.
- Simulated throttle with potmeter on SPGND, SP5V, SP.
- Flashed controller with EBiCS opensource firmware.
- Blew 2 FETs due to running controller without heatsink.
Spare ebike parts repurposing
Learning process how to use a RadRhino motor, controller and display.