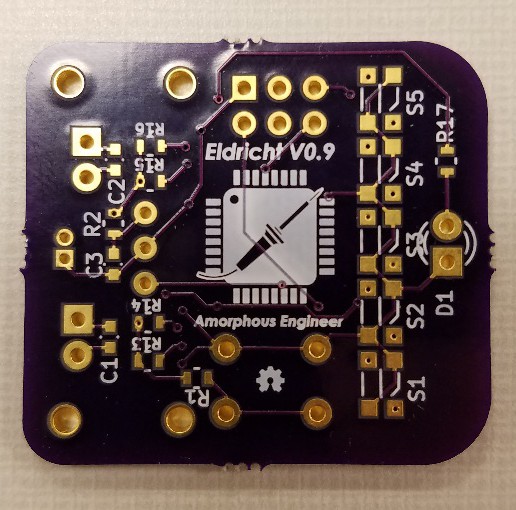
 AmorphousEngineer
AmorphousEngineerFeatures:
- Line tracking
- IR remote communication.
- Tiny footprint and price.
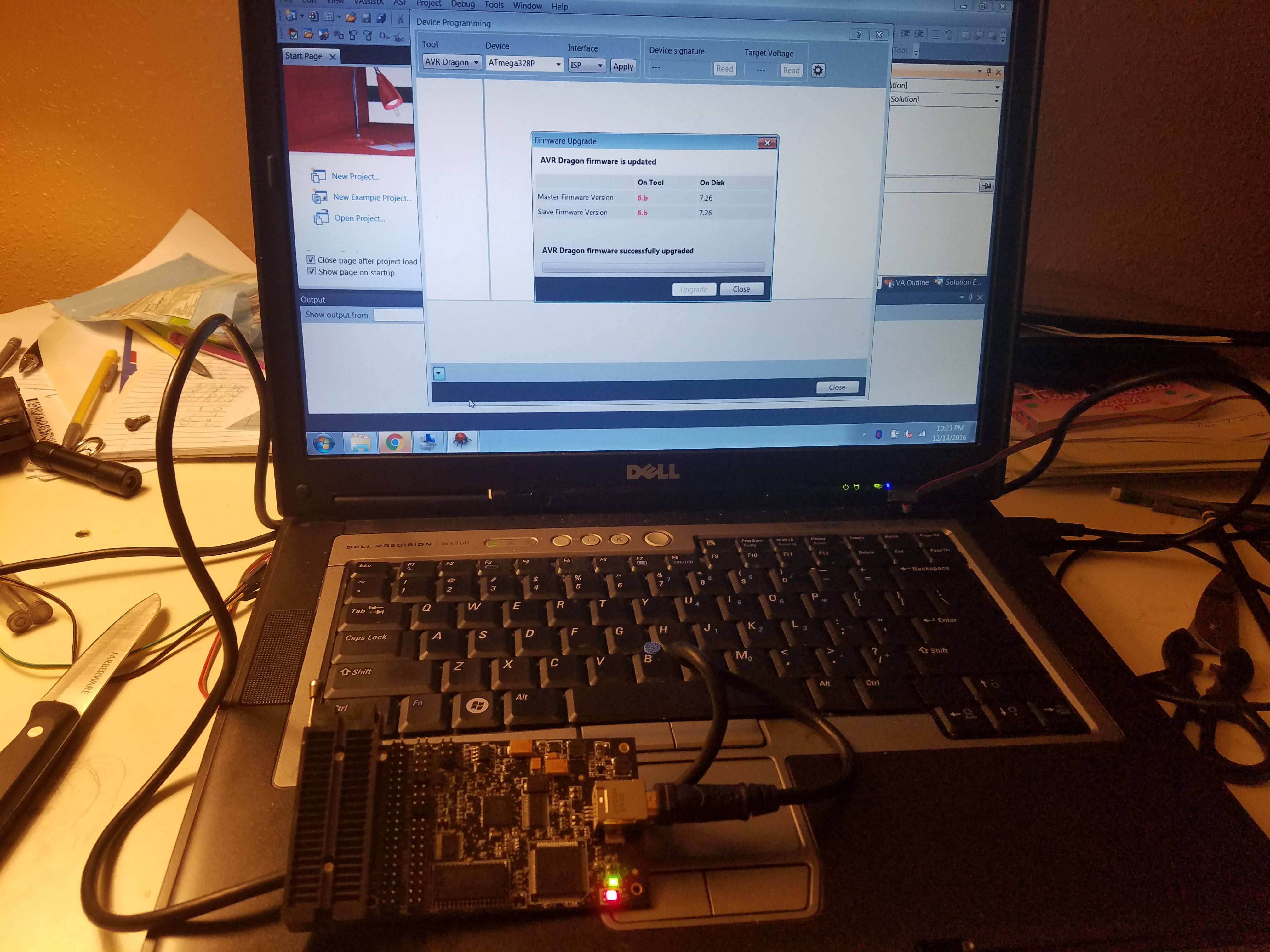
- Use of Common ATMEGA 328p-32pin (Arduino compatible)
Completed:
- Build DIP prototype (abbreviated)
- Draw schematic.
- Design PCB
- Send to PCB fab (OSH Park)
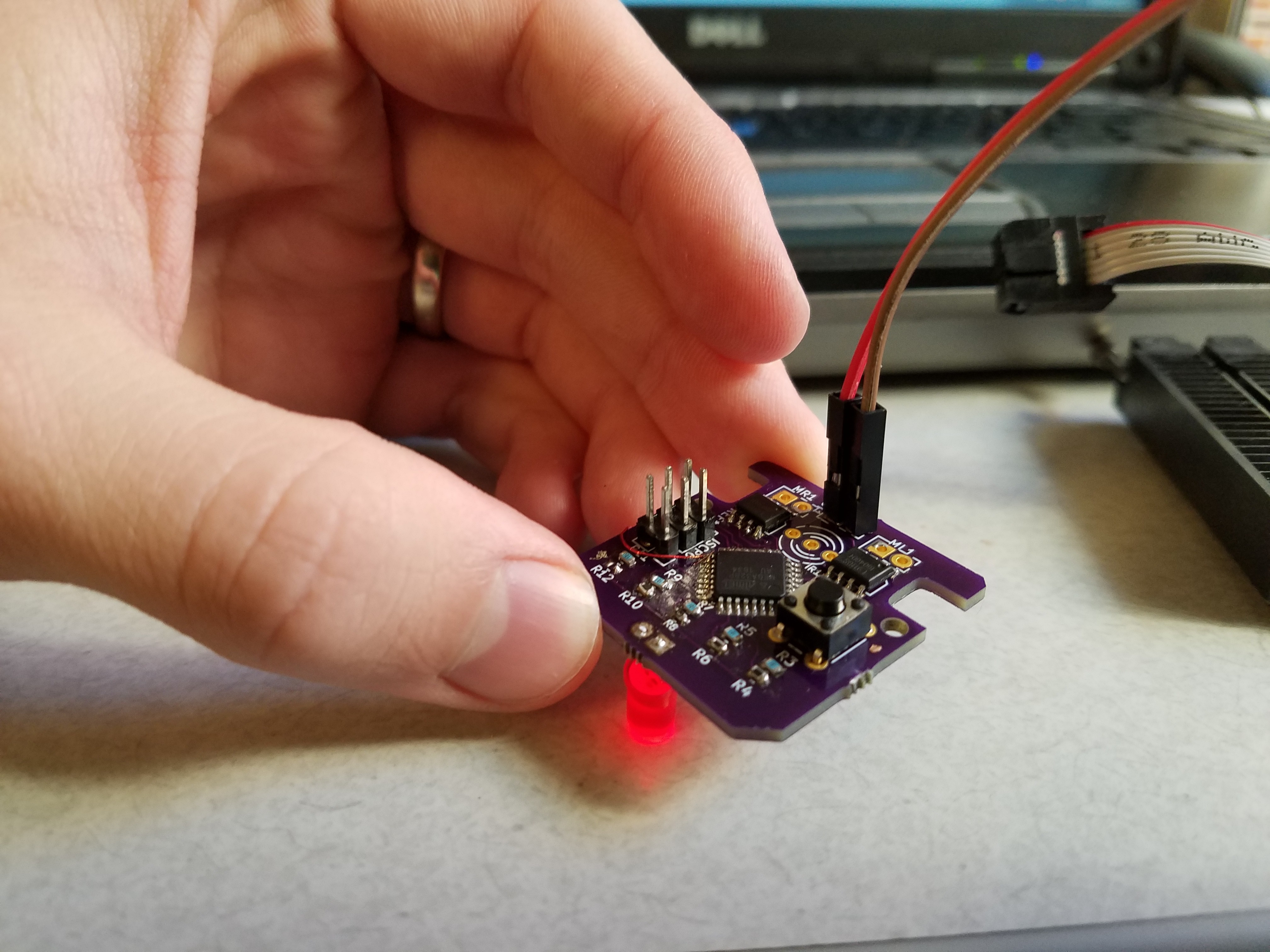
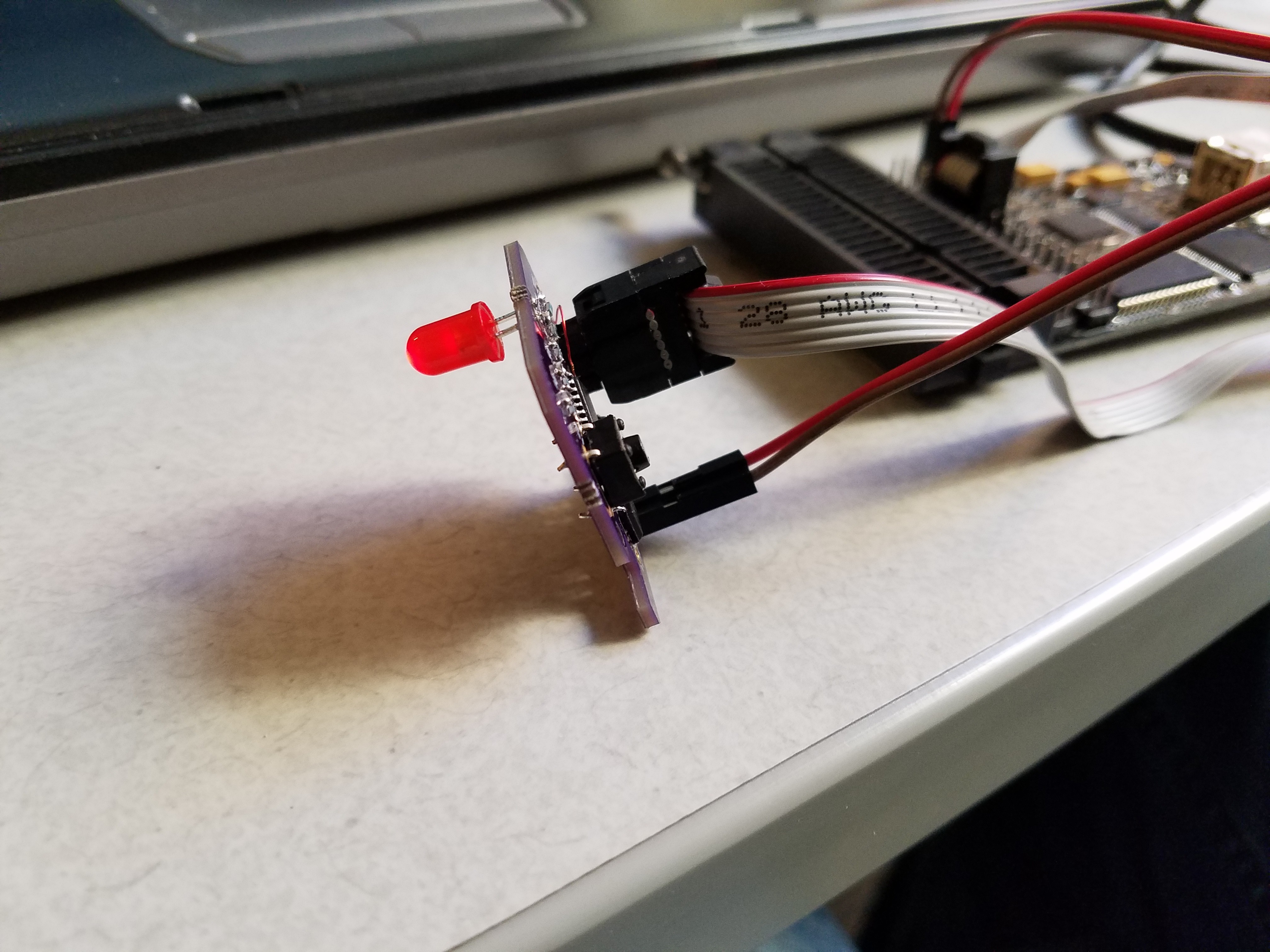
- Solder Components.
- Add bodge wires.
- Upload test code.
To Do:
- Select Battery and Charging system.
- Test for fabrication issues.
- Begin programming control system.

 DIY GUY Chris
DIY GUY Chris
 Extreme Electronics
Extreme Electronics
 Eric
Eric
 Enki
Enki