If you have hard-time 3d printing stuff and other materials which i have provided in this project please refer the professionals for the help, JLCPCB is one of the best company from shenzhen china they provide, PCB manufacturing, PCBA and 3D printing services to people in need, they provide good quality products in all sectors
Please use the following link to register an account in JLCPCB
Pcb Manufacturing
----------
2 layers
4 layers
6 layers
PCBA Services
JLCPCB have 350k+ Components In-stock. You don’t have to worry about parts sourcing, this helps you to save time and hassle, also keeps your costs down.
Moreover, you can pre-order parts and hold the inventory at JLCPCB, giving you peace-of-mind that you won't run into any last minute part shortages. jlcpcb.com/RNA
3d printing
-------------------
SLA -- MJF --SLM -- FDM -- & SLS. easy order and fast shipping makes JLCPCB better companion among other manufactures try out JLCPCB 3D Printing servies
JLCPCB 3D Printing starts at $1 &Get $54 Coupons for new users
Supplies


The machines and projects must include the following features:
• use an Arduino microcontroller board (UNO, Leonardo, 101);
• request at least the use of an input sensor;
• generate at least one output interfacing with the real world, which can be visual (LED, screens) or physical (moving motors);
• use at least one device not explained in class, it can be a sensor or a motor and its pilot card.
The project we decided to build is a toy bipedal robot (taking the "Otto DIY" open source project as an example) able to walk and turn around using an Arduino board which is controlled by IR signals sent by another Arduino board (which will work as a remote control).
Step 1:


Introduction
In this report we will explain the operation of a bipedal robot driven by
microcontrollers and controlled by a remote, able to walk and turn around.
Goal
The machines and projects must include the following features:
• use an Arduino microcontroller board (UNO, Leonardo, 101);
• request at least the use of an input sensor;
• generate at least one output interfacing with the real world, which can be visual (LED, screens) or physical (moving motors);
• use at least one device not explained in class, it can be a sensor or a motor and its pilot card.
The project we decided to build is a toy bipedal robot (taking the "Otto DIY" open source project as an example) able to walk and turn around using an Arduino board which is controlled by IR signals sent by another Arduino board (which will work as a remote control).
Used Material
The components necessary for the realization of the project are the following ones:
- 2x Microcontroller (Arduino UNO, Elegoo Nano);
- 4x Micro servo SG90;
- IR LED;
- IR receiver VS1838B;
- joystick module;
- 100Ω resistance;
- Arduino nano expansion board;
- Jumper cables;
- PLA pieces (obtained by 3D printing).
The printed pieces’ 3D drawing files were downloaded from the website “Thingiverse”, as “Otto DIY” is an open source project.
The servos and the IR receiver don’t require any resistance as it’s integrated in the components.
To make the robot’s wirings easier we mounted the Elegoo Nano on an expansion board.
Functioning
To make the bipedal robot we used 2 microcontrollers.
The first one is an Elegoo Nano board connected to the joystick module and to the IR LED to assume the function of a remote control: it calculates the position of the joystick to understand where the robot has to go (so, which code has to be sent).
The second microcontroller is the “mind” of the robot: it controls the movements of the 4 servos based on the infrared signals received by the sensor. The operation of both devices are described in the following flowcharts.
Step 2:



An open-source modular robot with an epic personality. It means the hardware is easily discerned so that others...
Read more »
 ken.do
ken.do
 Abid Jamal
Abid Jamal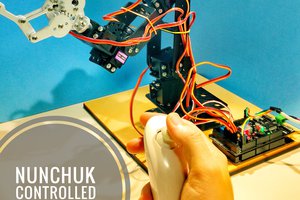
 igorfonseca83
igorfonseca83
 M TECH IDEAS
M TECH IDEAS