 Saul
SaulThought about it for a while but just started. not sure if this fits any category for now...
I can't do any tricks beyond jumping onto my board but not the skater way...
But I know enough tricks from watch xgames.
- The sensors will mount to the inner bolts of the back truck, with the distance sensor facing down.
- This gives a direct Distance to ground measurement to add to the imu data.
- Most skate tricks consist of rotating the board in one or more axis.
- combined with the pico's RTC(Real time Clock) which is pretty good! should be able to get extremely precise data
- App Feature - use the Phone IMU to "record a trick".
- Then match this trick to sensor data
- note Dominate axis/secondary axis (what counts)
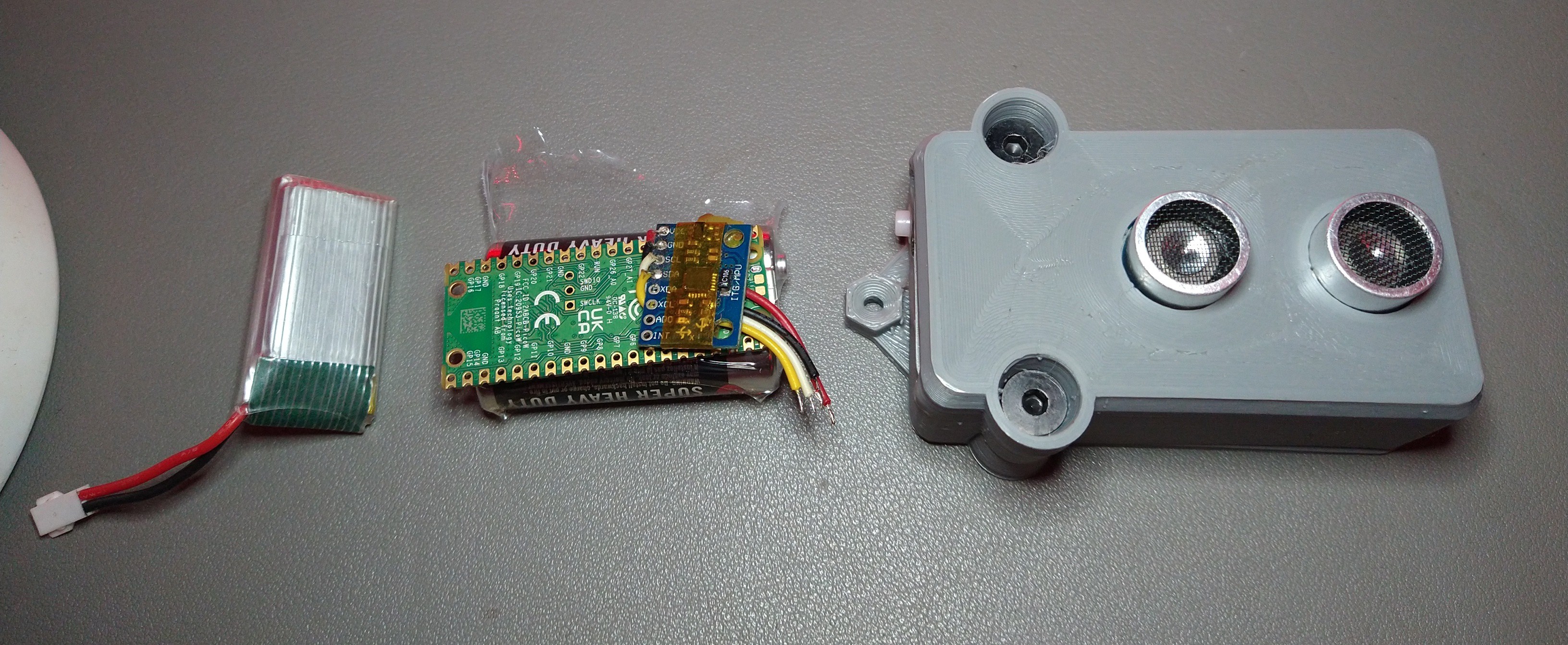
- Base electronics weight: 20g
- + 15g AA battery
- + Case
- Total Weight about 40-60g Compared to a total Board weight of About 2500-4000 g = 2% weight
I mean what Robot would do this? not my video, lands it at 4:19
Basic plan:
- Dumb Sensor on Board.
- Smart App wifi/bt connected.
- Machine Learning to help analyze data and spot "Tricks".
Its nice when things work! Day one.
After a few minutes of the wifi being annoying and then android not wanting unencrypted urls.
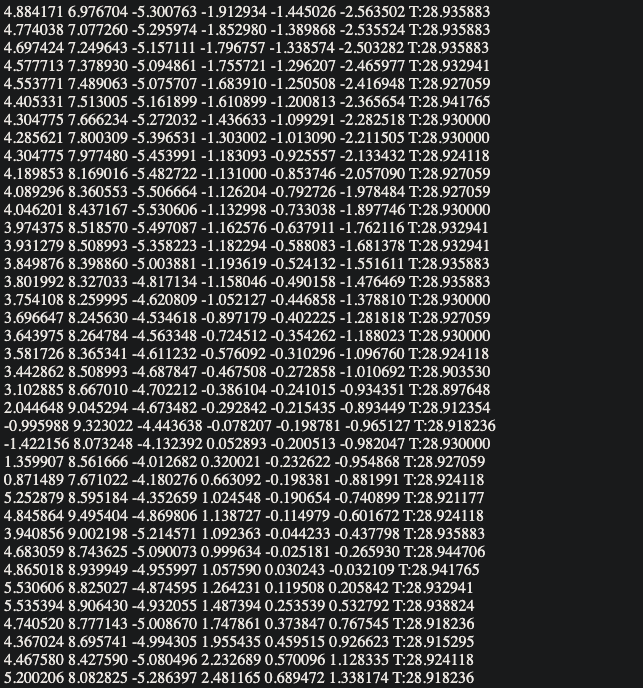
- Got the android app to load sensor data (111 reading, at the time of loading)
- update pico time from using android as an http argument url (10.0.0.11:port/CurrentTime)
- Next add timestamps to the imu data/
- log data evenly 50x/100x per sec
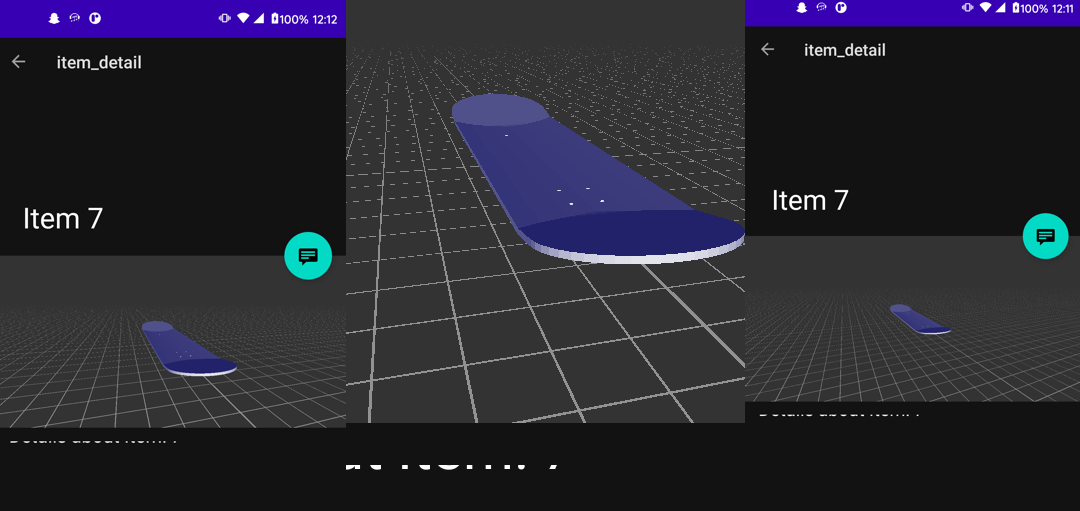
- sync data on android side and start plotting/manage the data!
- 3D Print a full case + Battery. (i think just 2x aa?)
- check picoW power use with wifi updates about every second
- Check pico update speed
- eventually try bt
- maybe even micro python if that works first?






 kwan3217
kwan3217
 Radu Motisan
Radu Motisan
 Ulrich
Ulrich
 Samuel Wantman
Samuel Wantman