 AVR
AVRAccessibilità
Accessibilità is a family of open source hardware and software for wheel chairs! Starting with control interfaces first with the eventual goal of producing an entire open source electrical system someone can use to build a wheel chair or retrofit an existing one with a more modular, robust, and serviceable one.
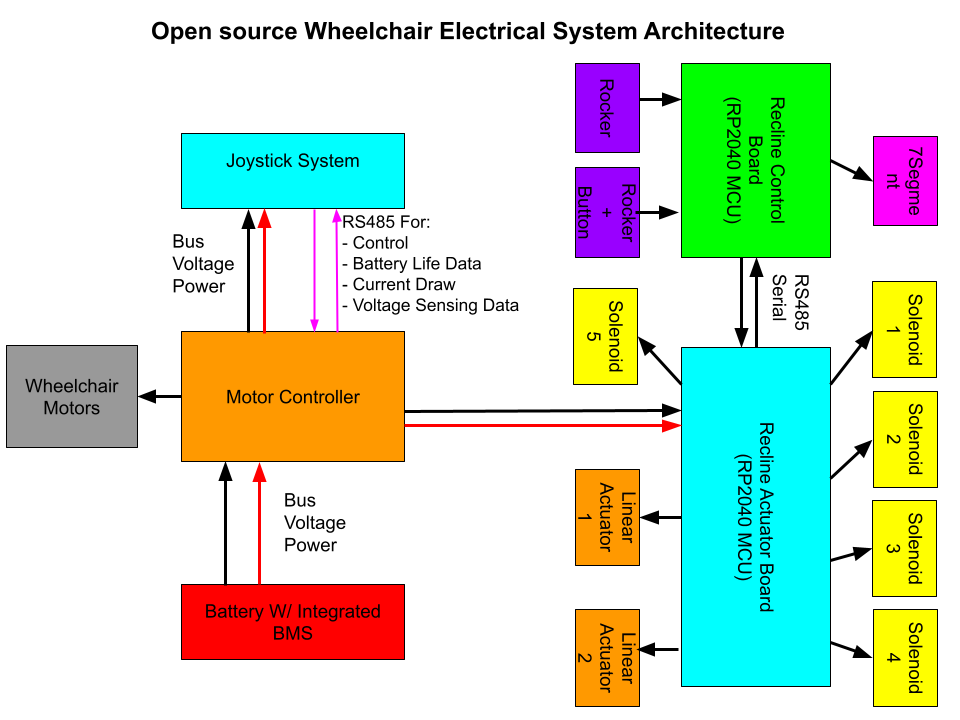
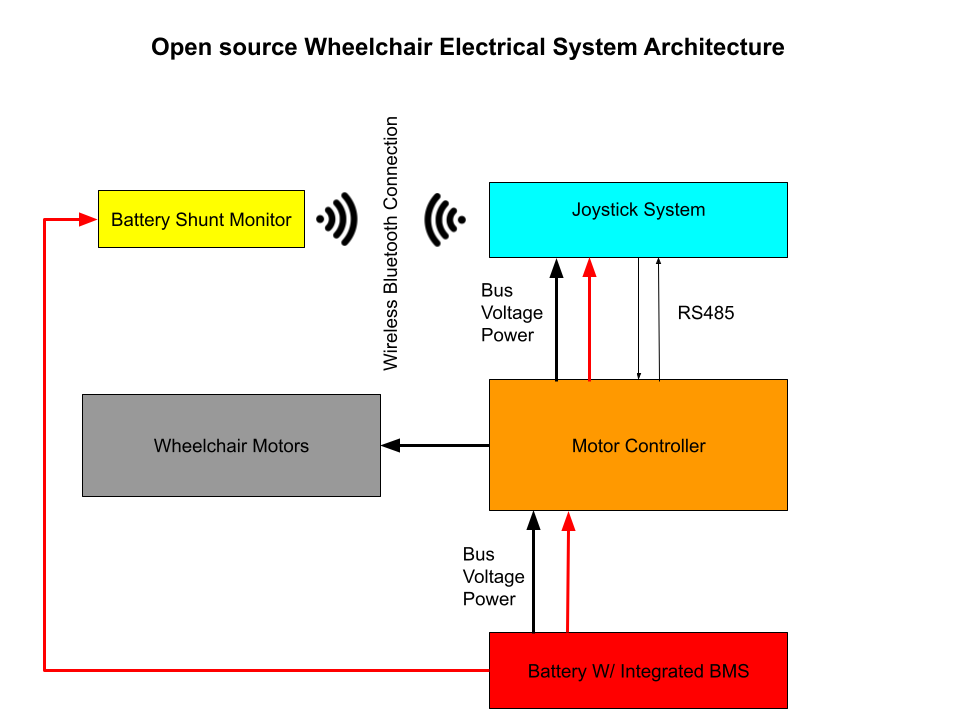
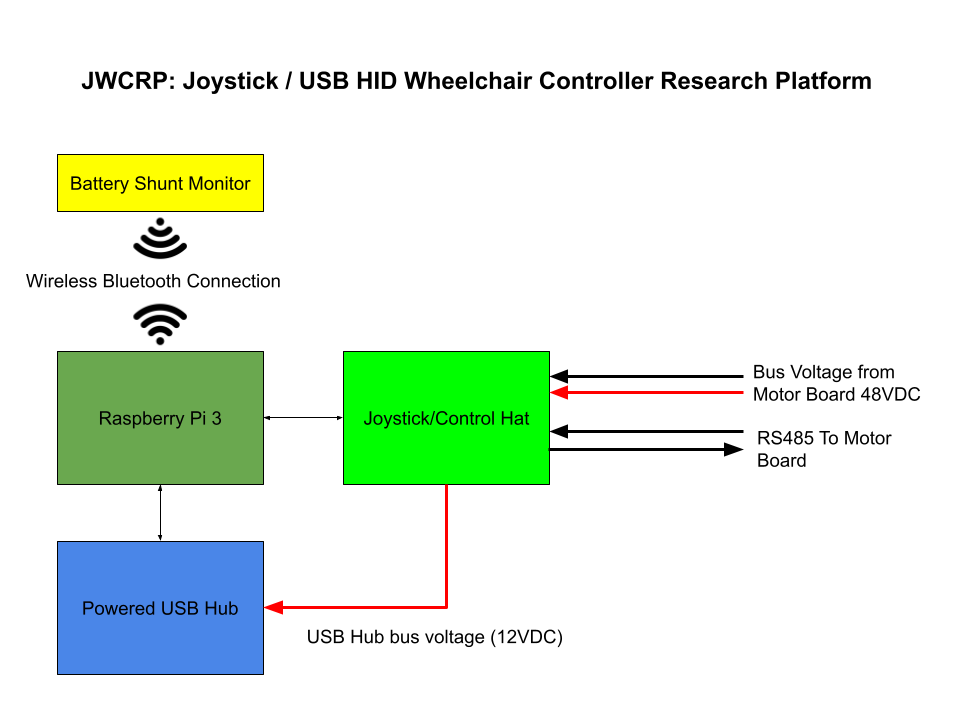
Overall System Architecture we aim to achieve as a retrofit system for the Omegatrax Wheel Chair :
Projects:
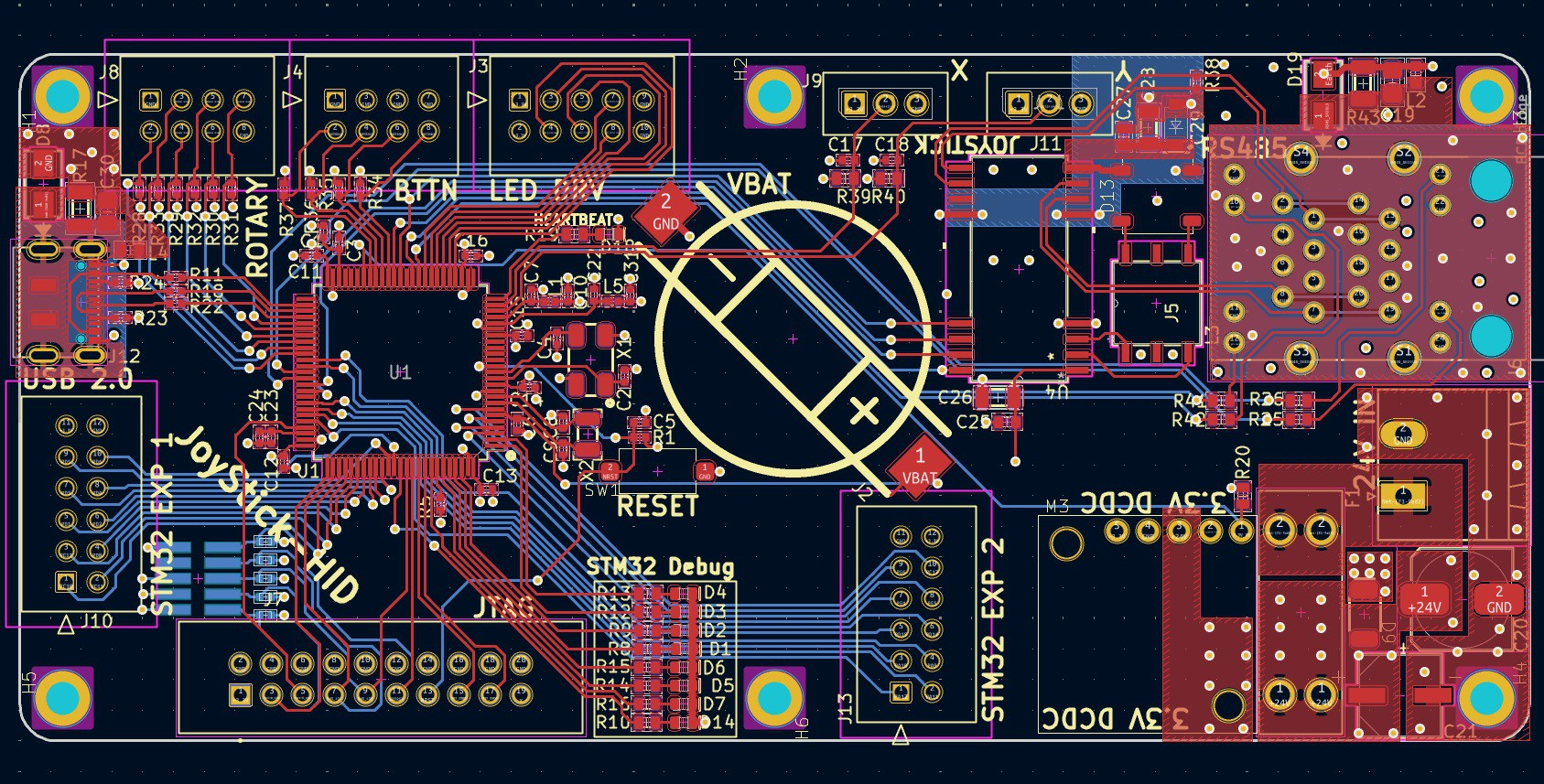
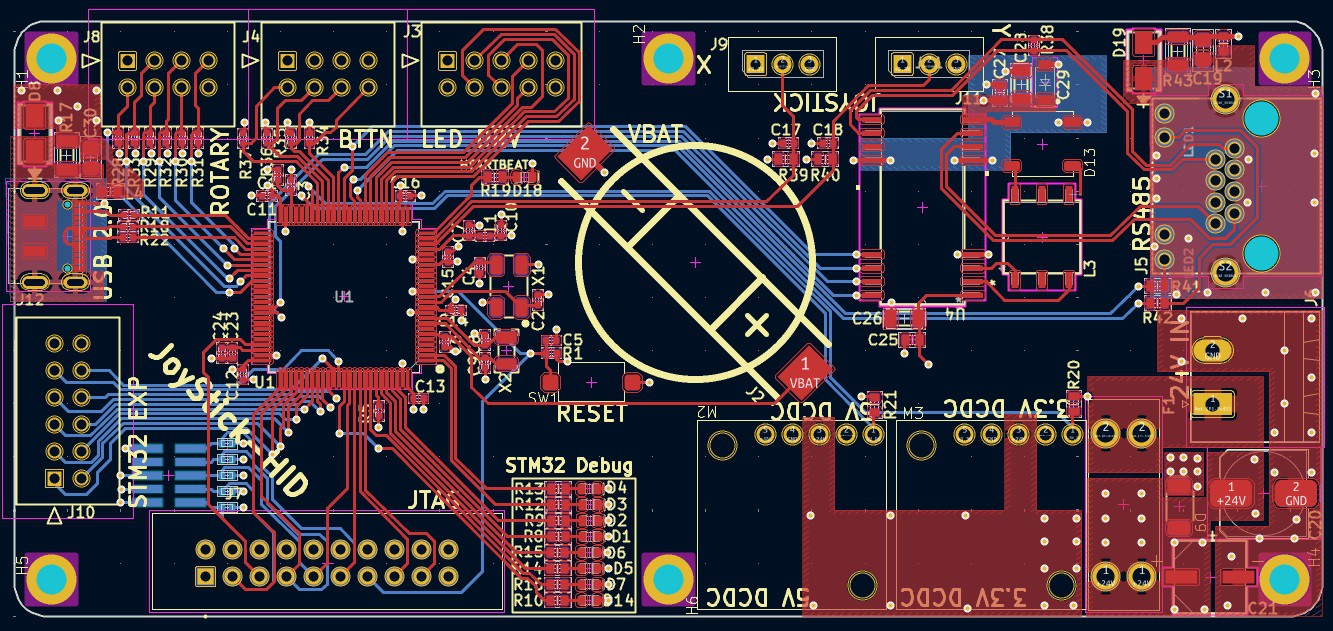
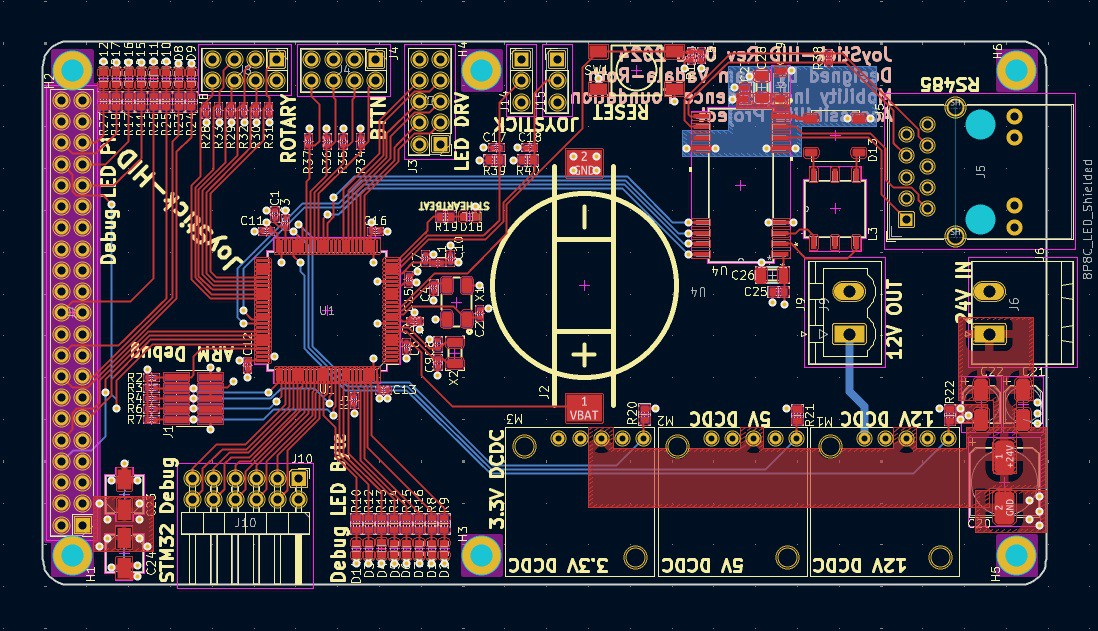
JoyStick-HID
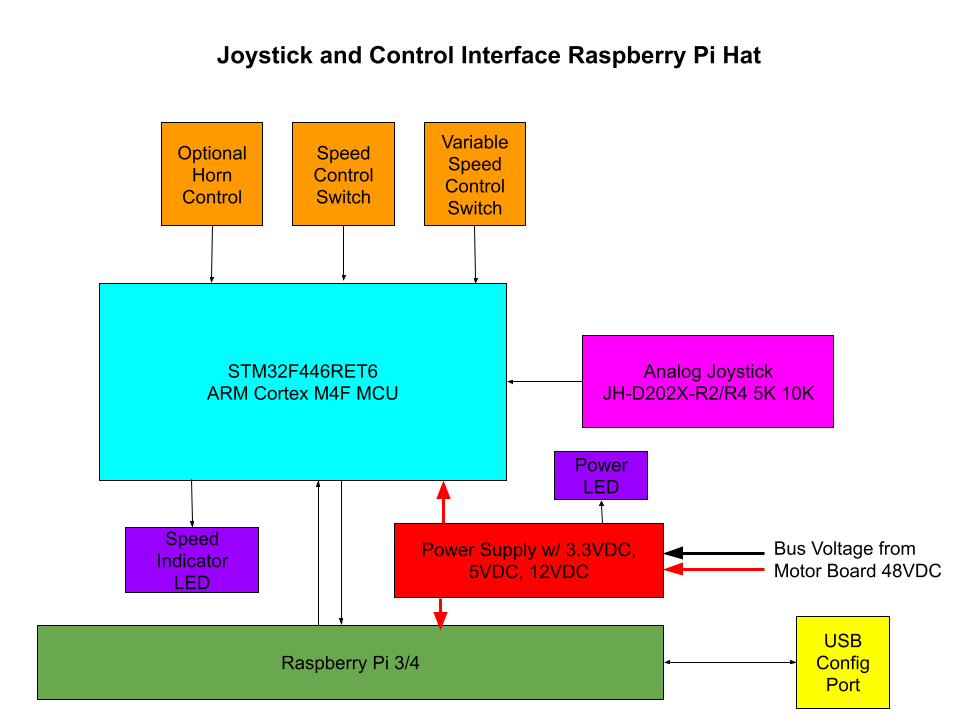
A custom open source PCB for controlling an open source wheel chair! This PCB contains all the necessary electronics for interfacing and powering all the components/peripherals that will be used to build a wheel chair human machine interface consisting of this PCB, analog JoyStick module, buttons, rotary switches, and 3D printed housing. JoyStick-HID is just one of the many PCBs being developed for our open source wheel chair electrical system we are developing with the Accessibilita project for wheelchair users worldwide !!

Quick Specs:
- STM32F446RET6 100TQFP ARM Cortex M4 Microcontoller
- ARM Cortex M Serial Debu Interface/connector for in system programming and development
- MAX3535ECWI+T RS485 Transceiver for communicating with main motor controller
- D24V22F3 2.5A 3.3VDC Voltage Regulator Module
- 24V Power Input with High Current Pheonix Contact Connector
- 8 Debug LEDs for STM32F446RET6
- Onboard Battery for STM32F446RET6 RealTime Clock
- Interface for JoyStick, JH-D202X-R2/R4 Joystick 5K https://protosupplies.com/product/jh-d202x-r2-r4-joystick-5k/
- Interface for two Rotary Switches
- Interface for 8 Momentary swiches/buttons
- Interface for LED driver board, this additional board drives LEDs in the arm wrest indicating battery level and current set speed
- STM32 will run FreeRTOS w/ Custom Processes written for all functionality with priority scheduling for safety rated functions.
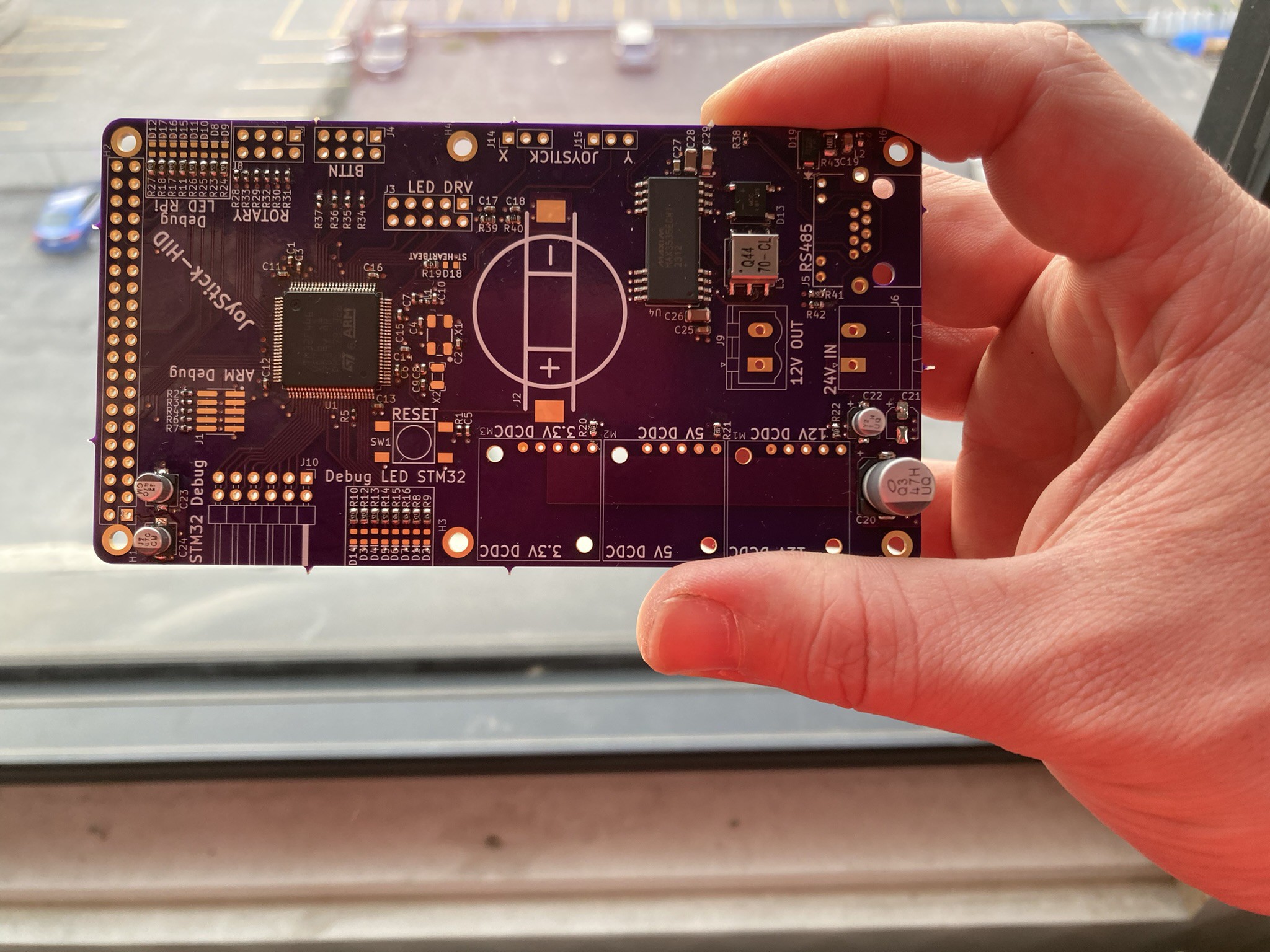
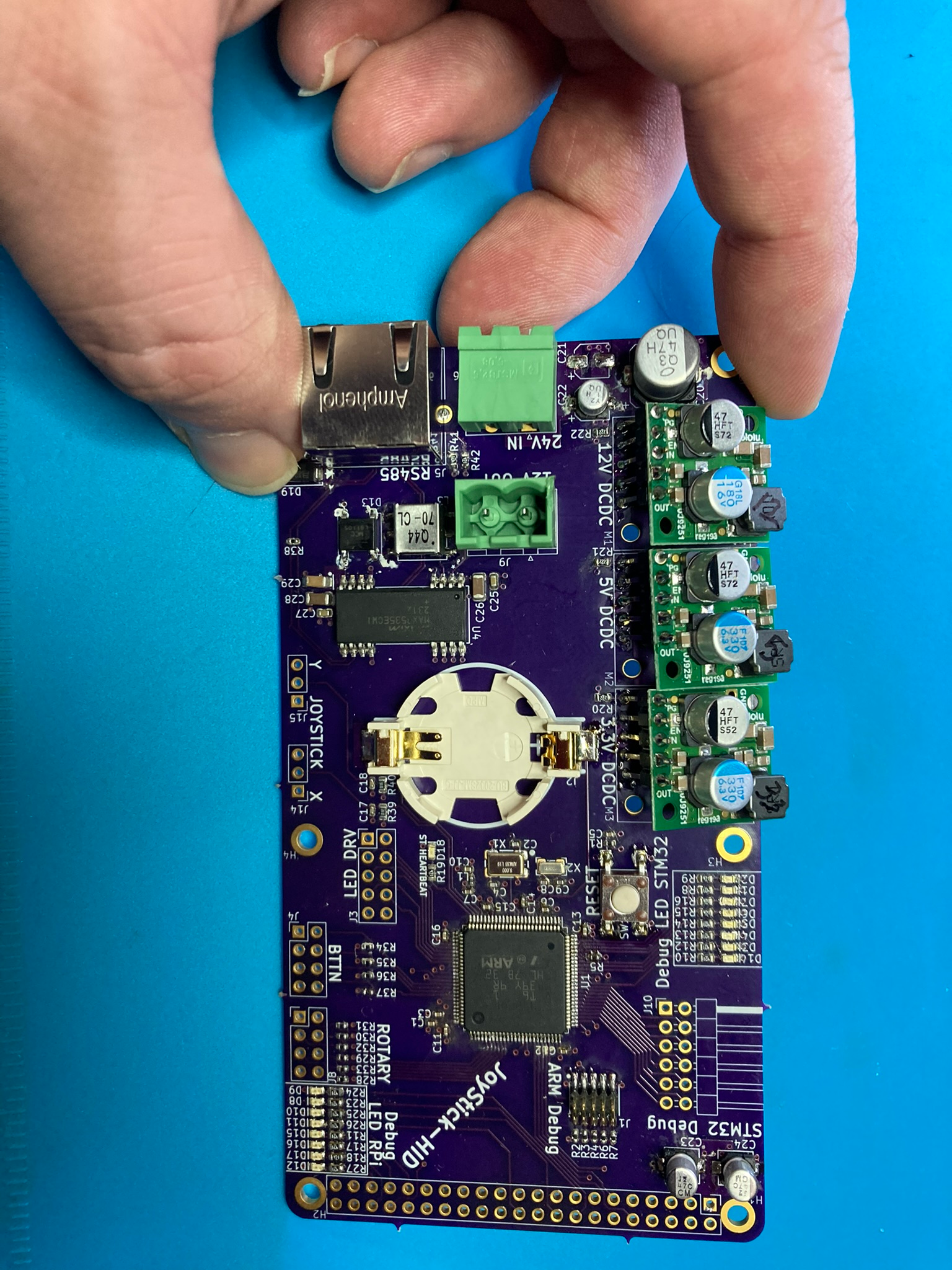
This board is intended as a developmental platform that can function in the field, it has all the features needed to control the wheel chair with additional feature that will make software development easier.
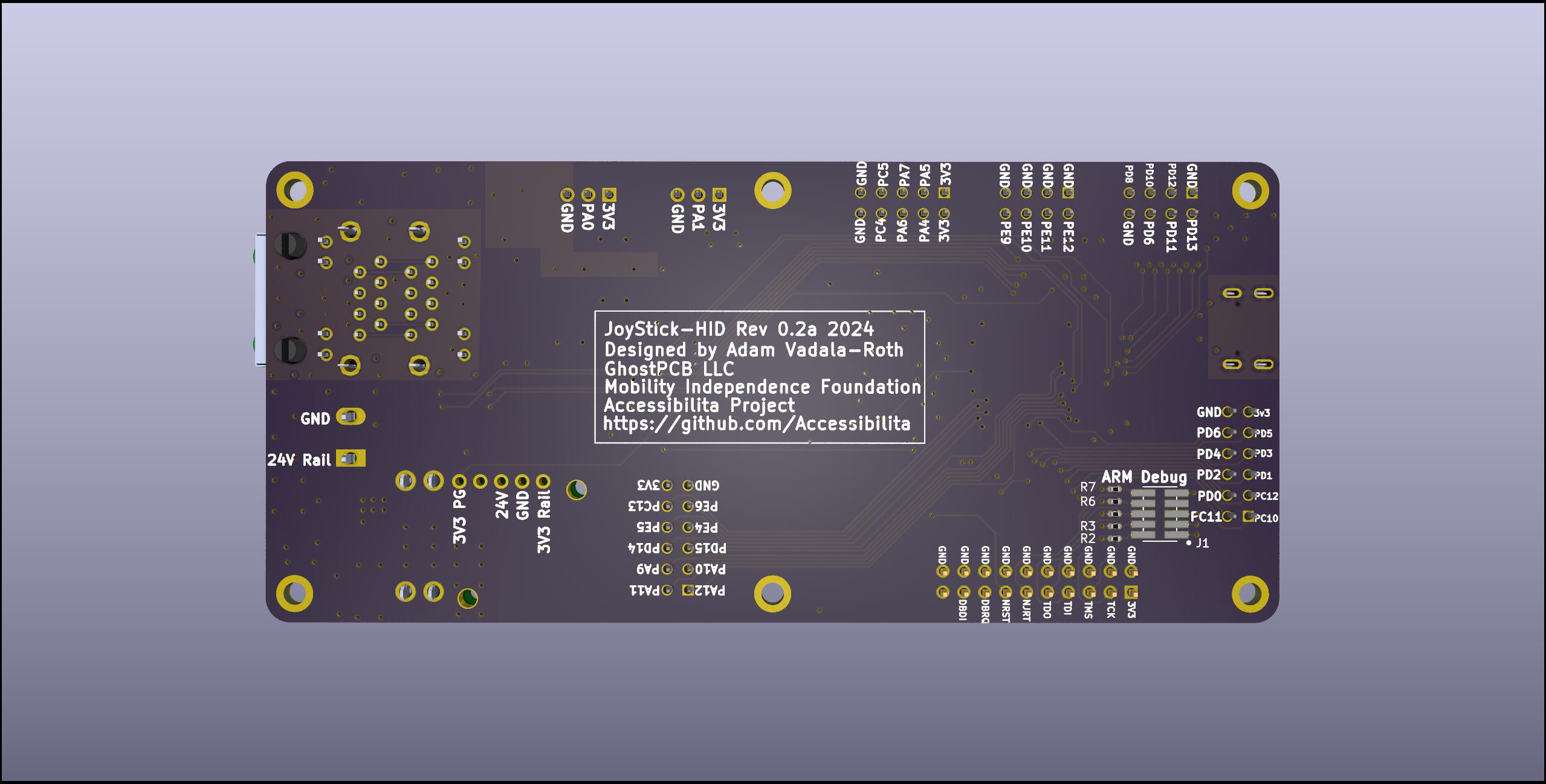
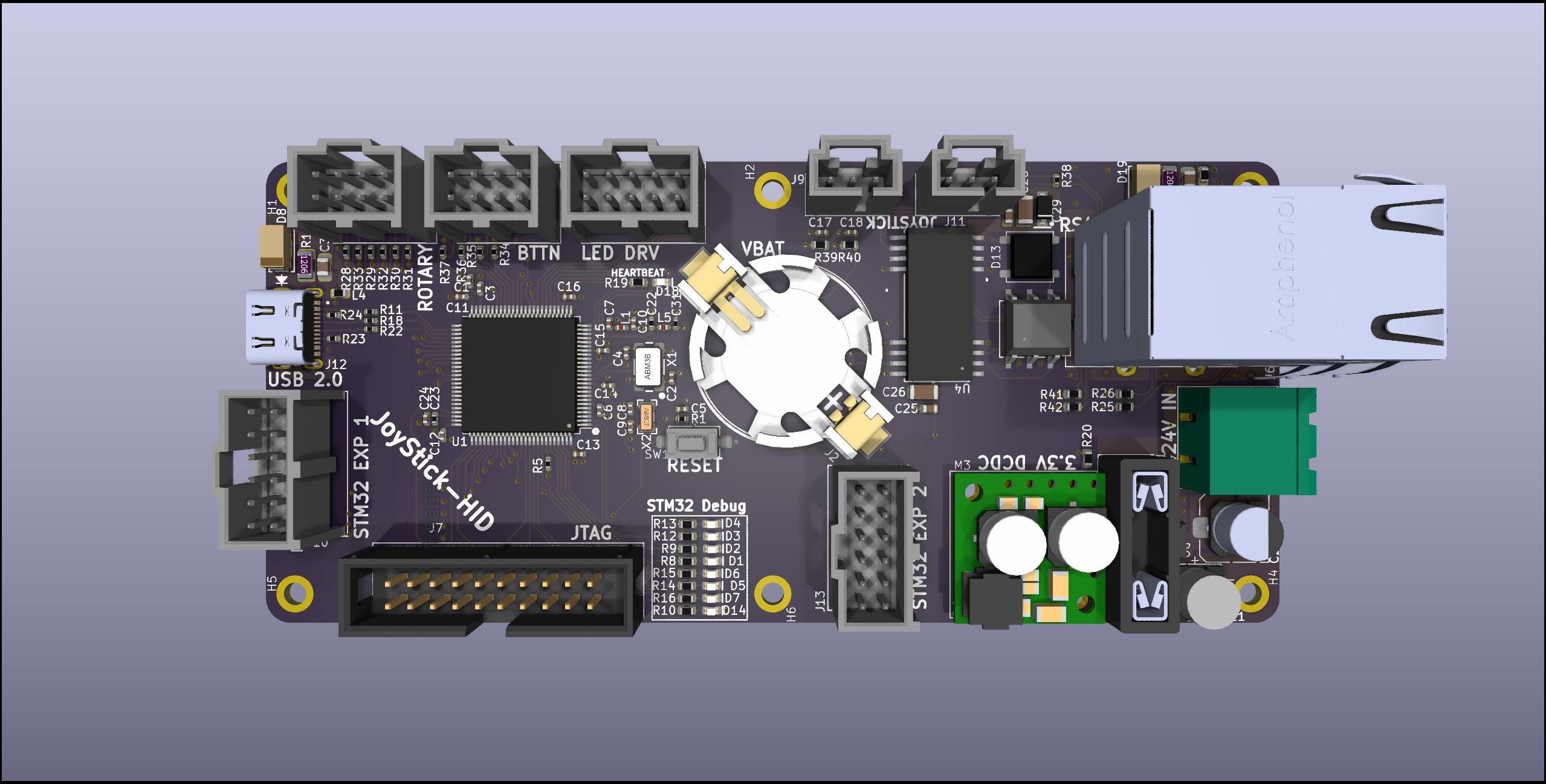
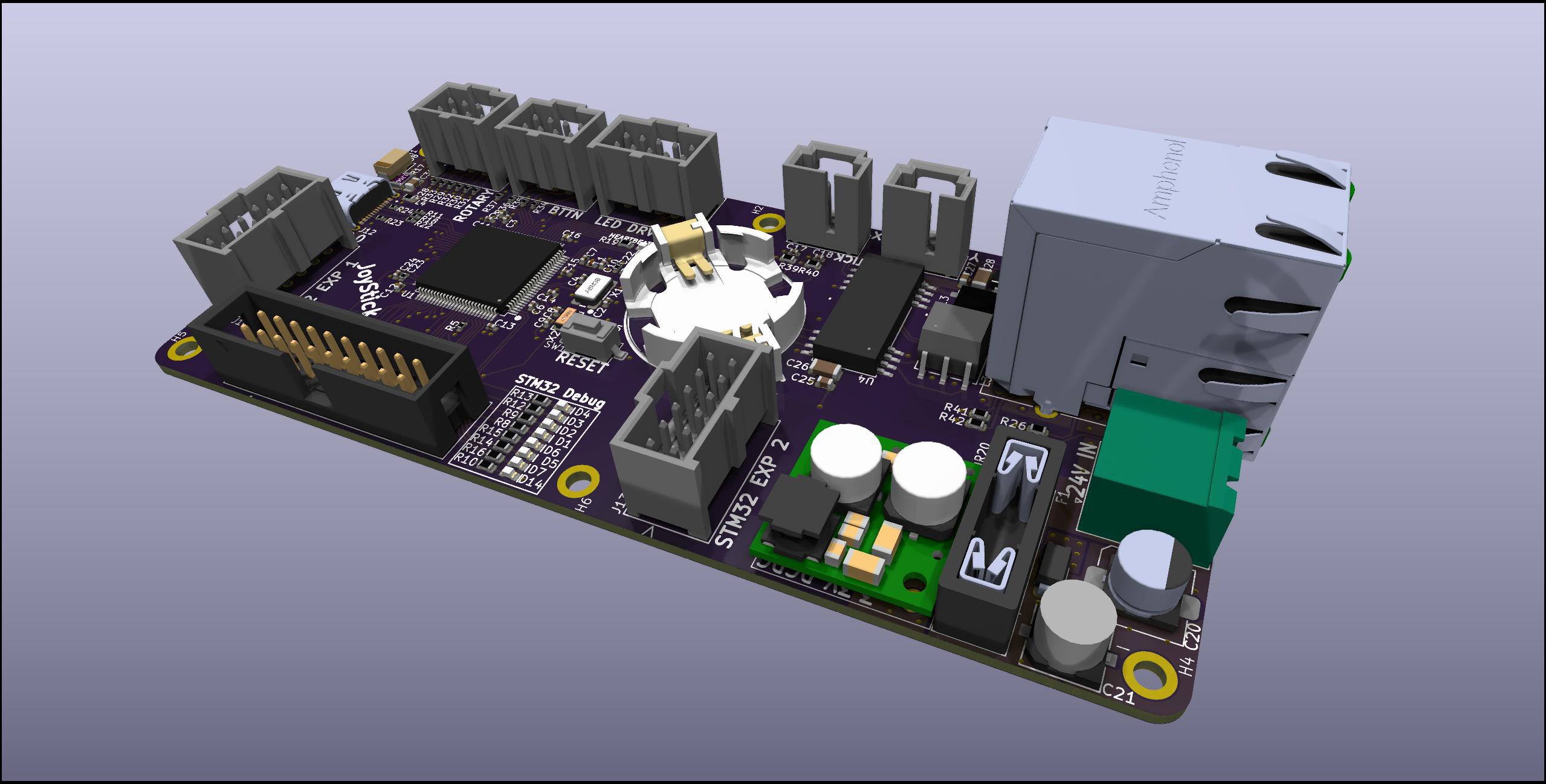
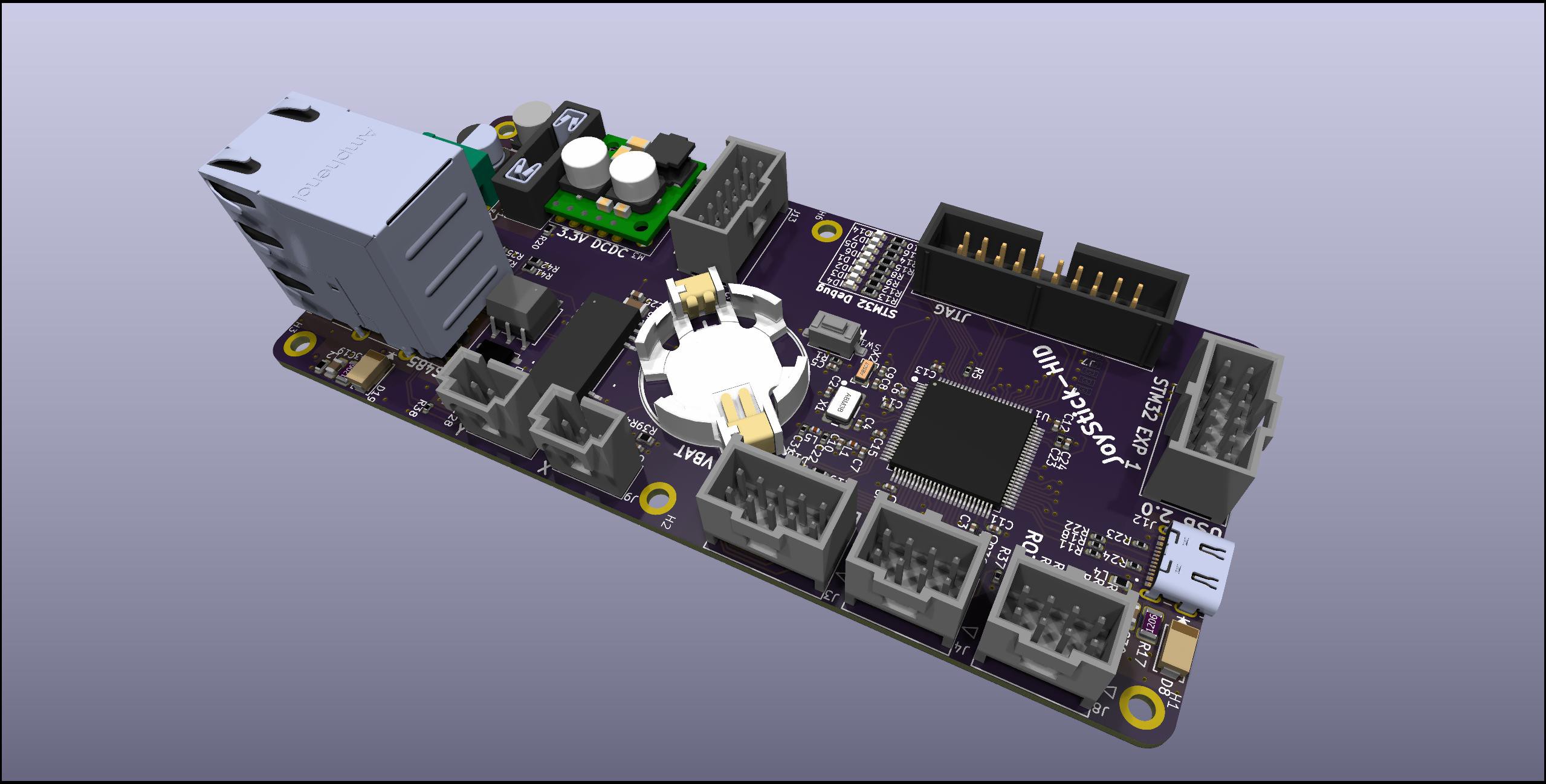
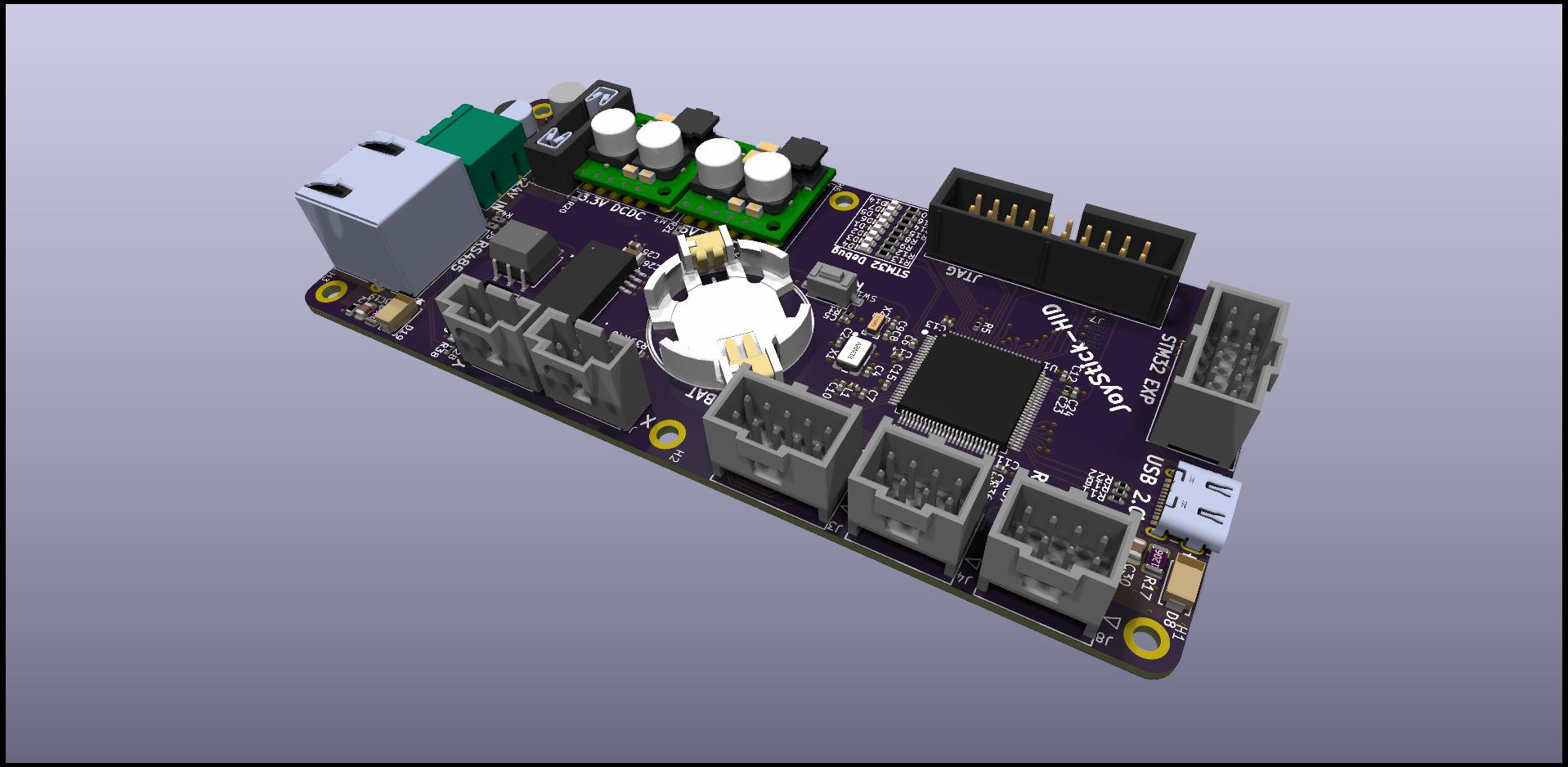
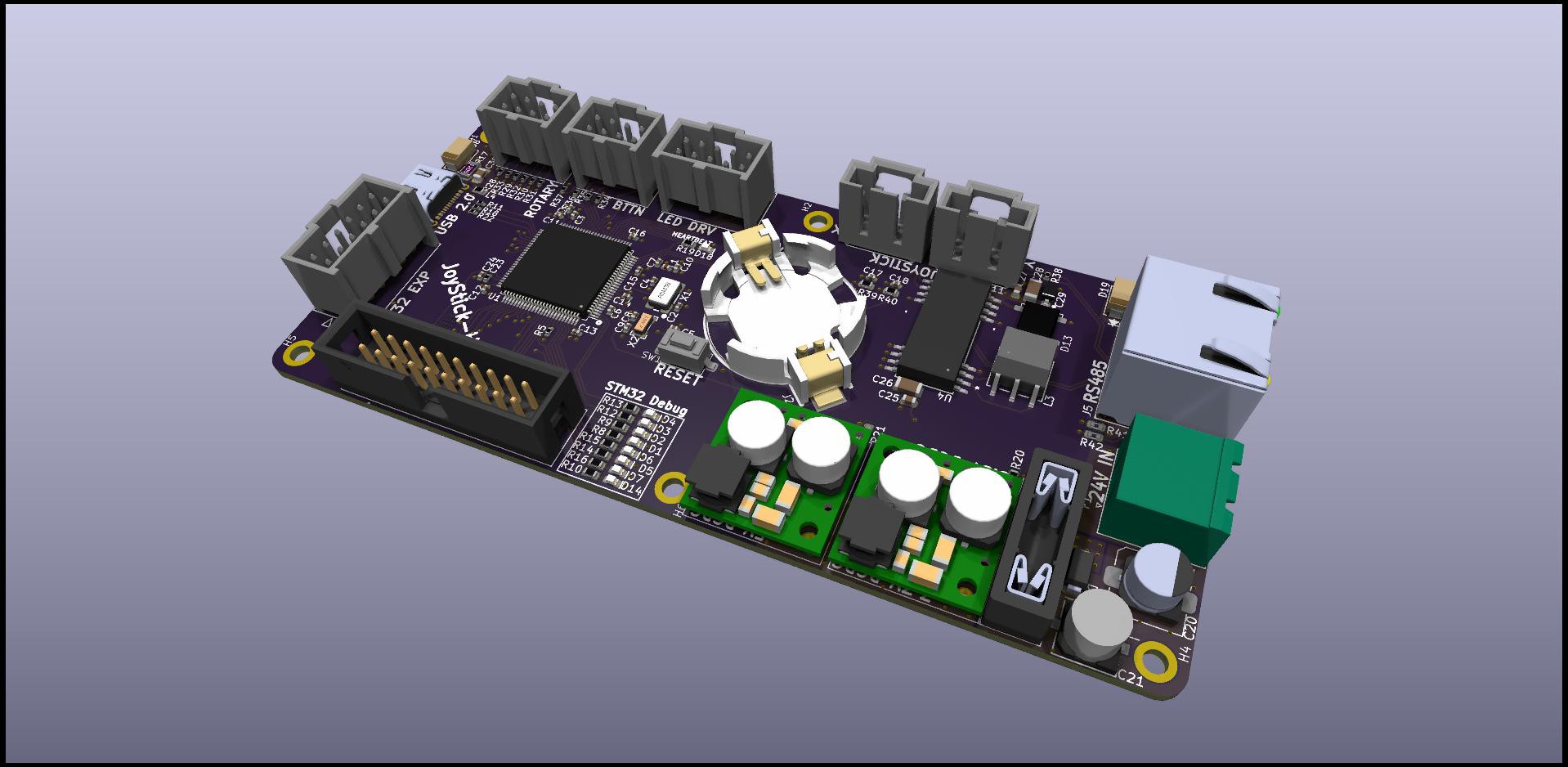
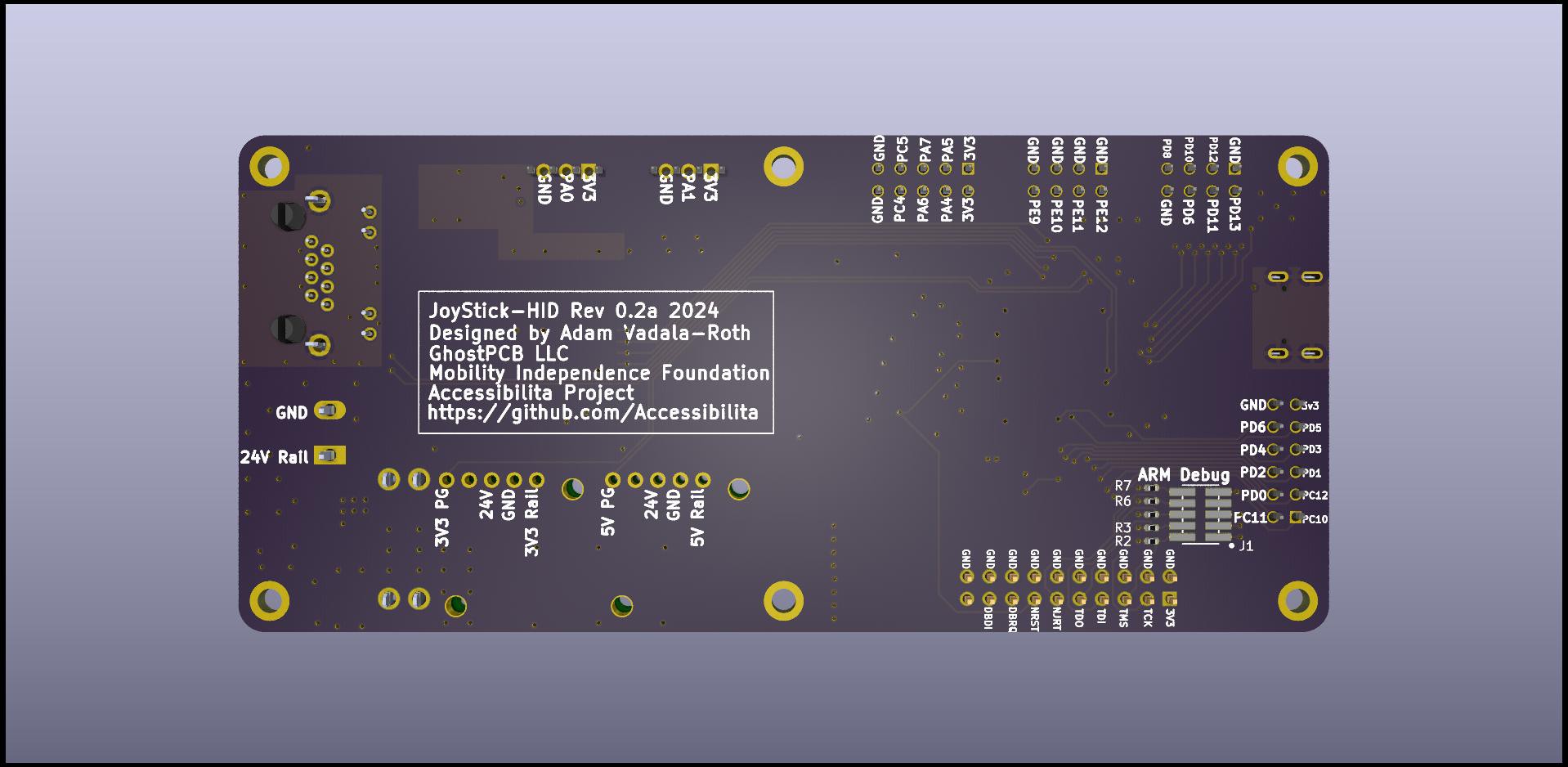
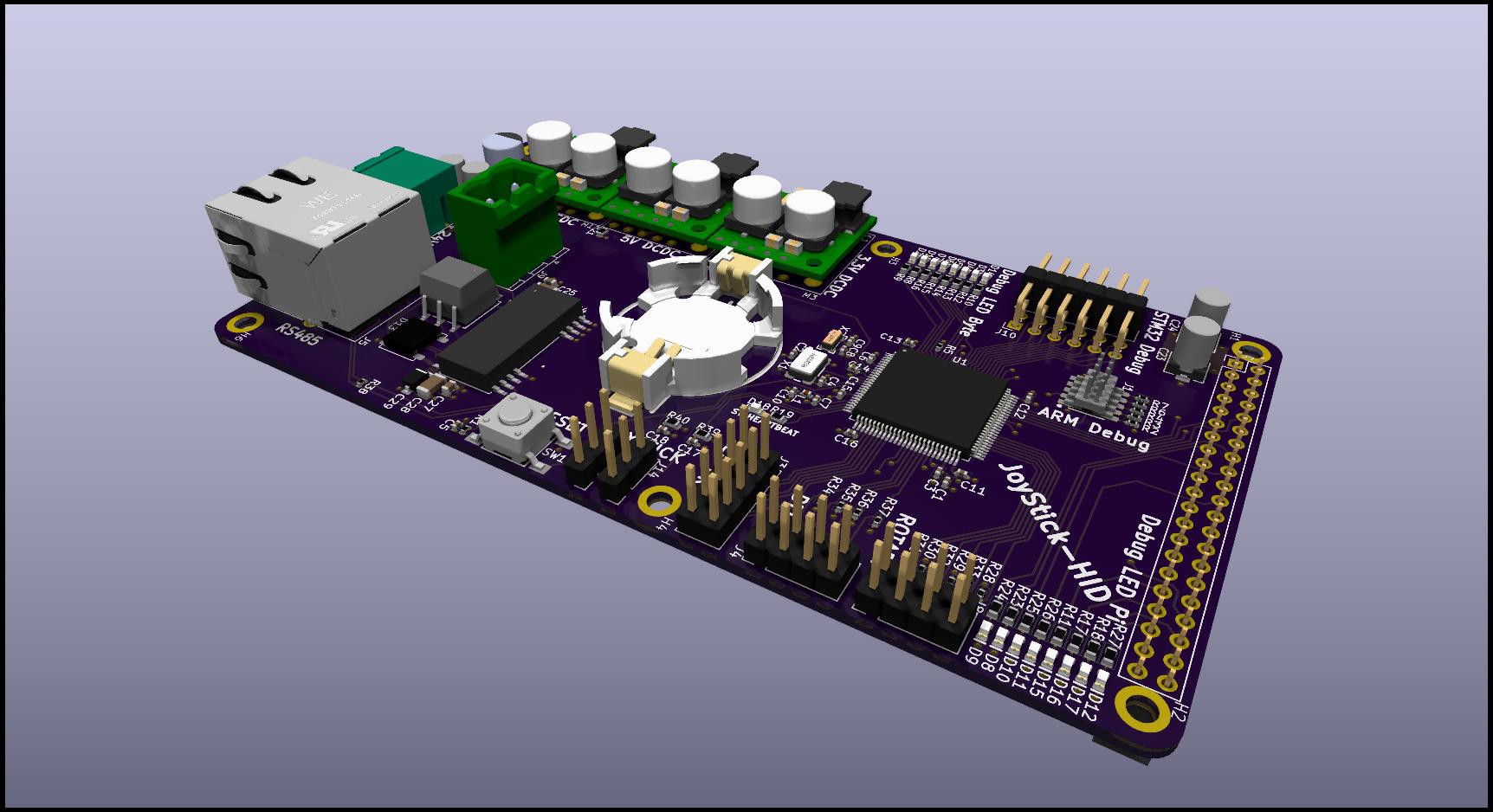
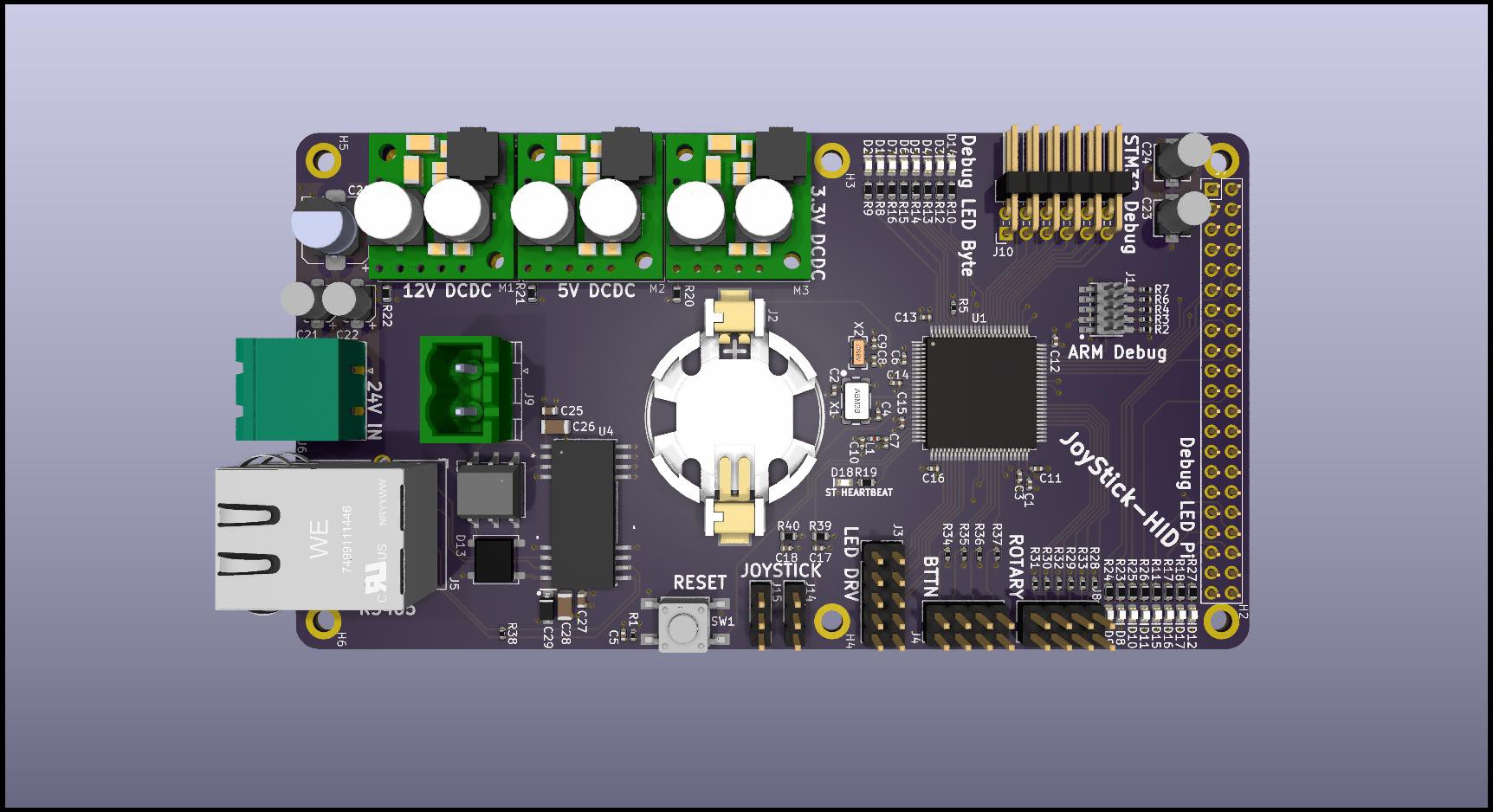
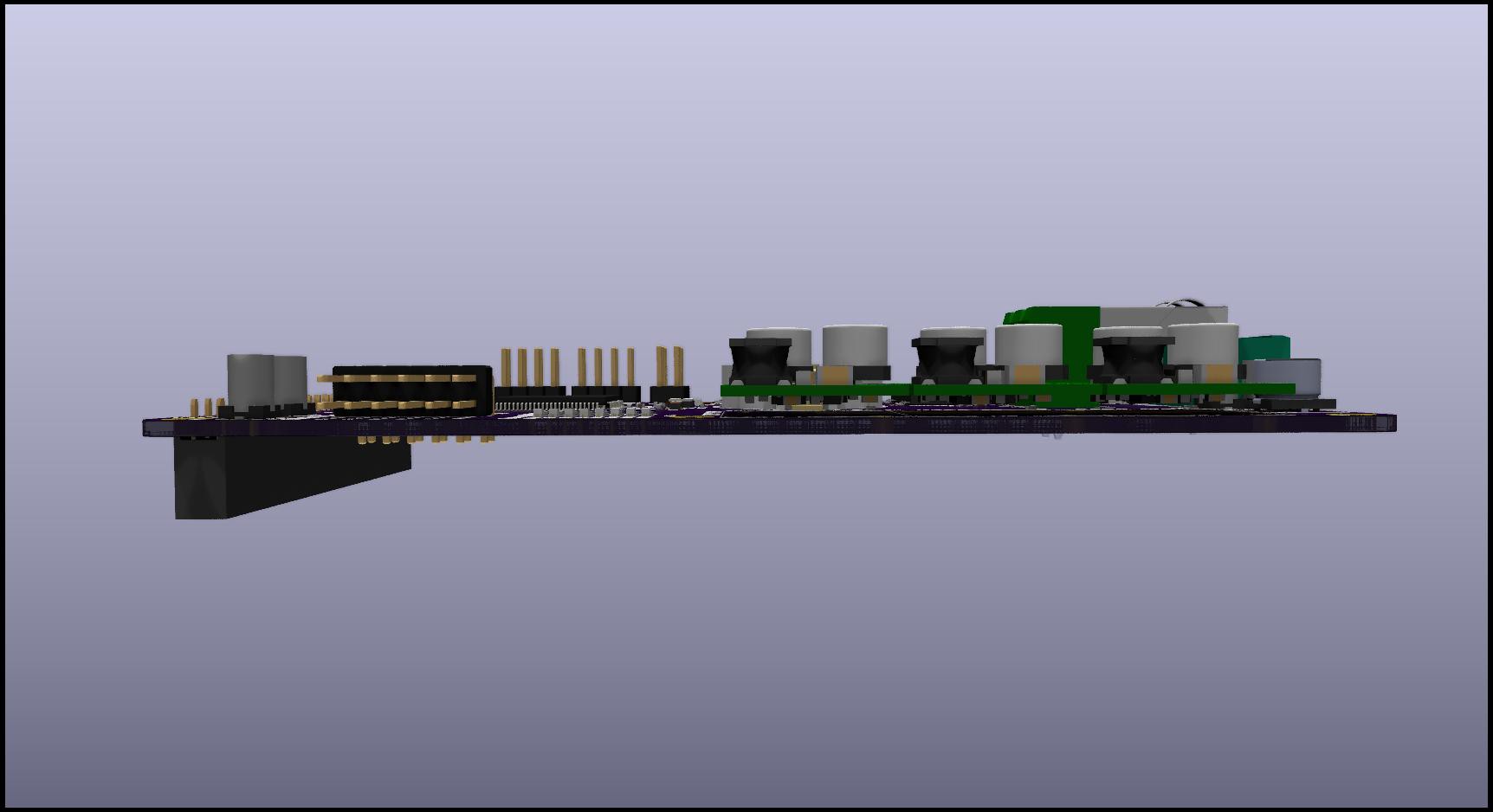
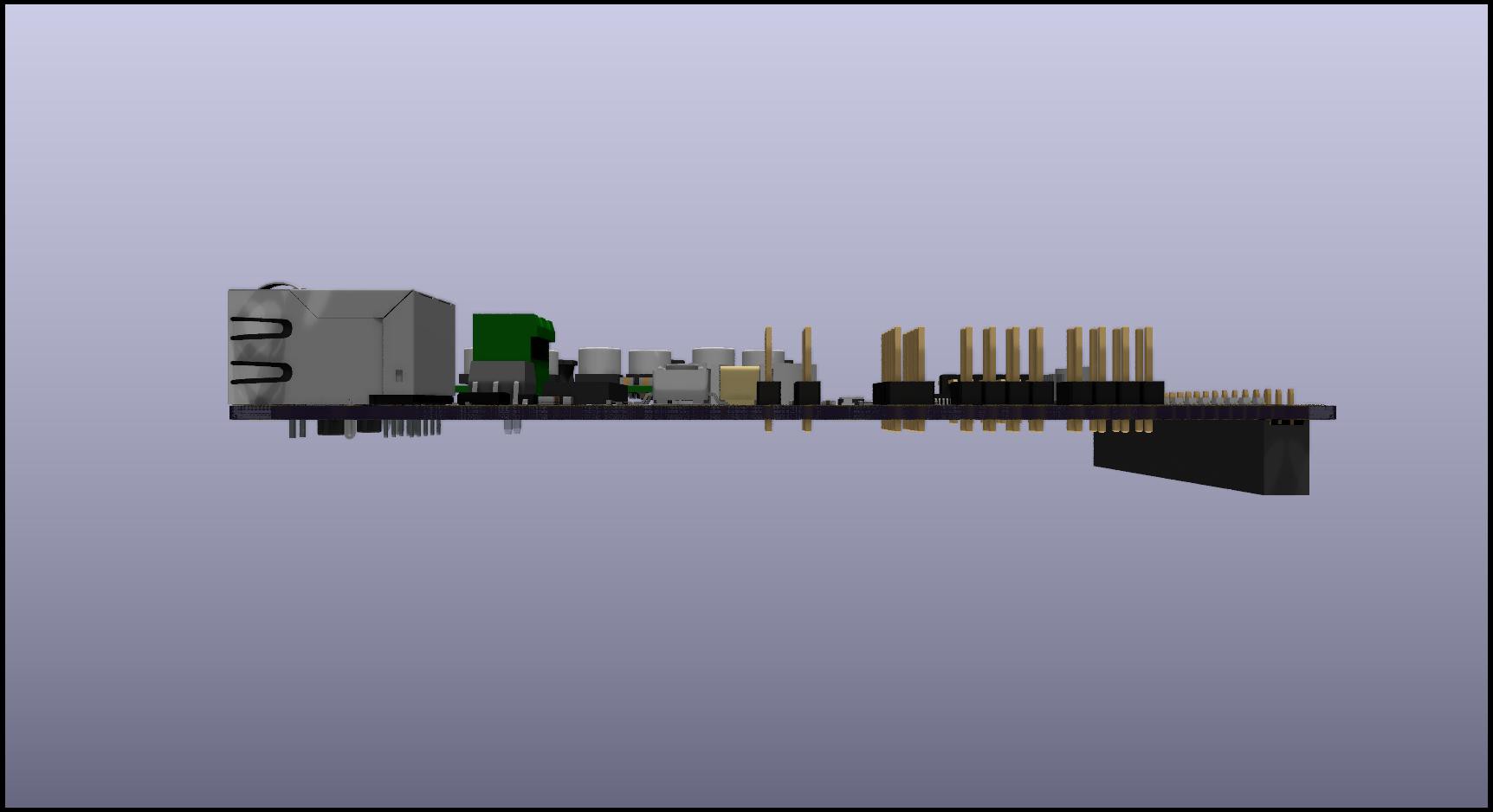
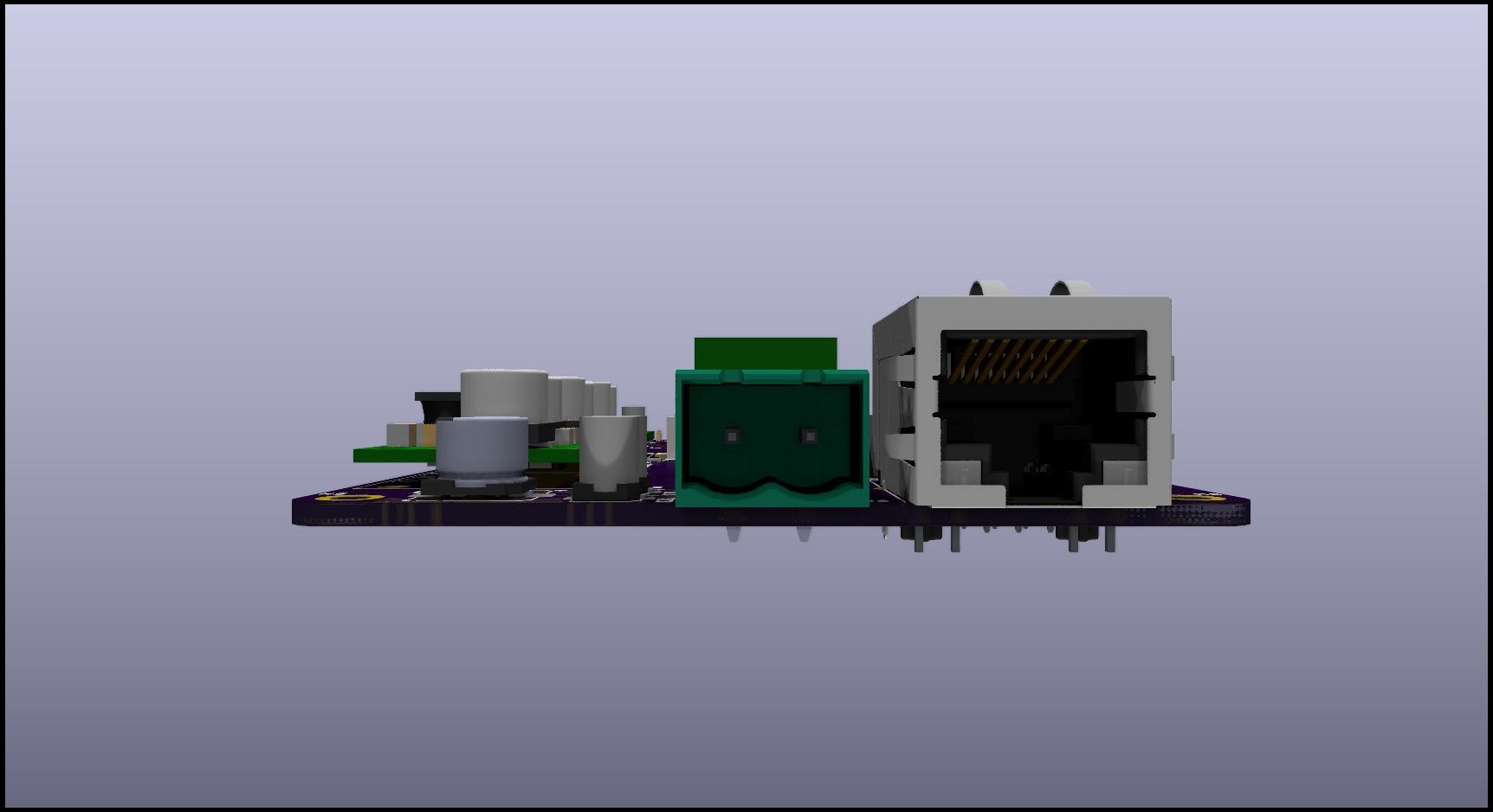
3D Renders of JoyStick-HID Hat in KiCAD 8.0 3D Viewer
Chair Recline System
The Recline control system allows the wheel chair user to adjust the recline position of their chair at their leisrure. Its a complete electrical controls system with with safety in mind. The system is split across two piece of electrical hardware design as two separated printed circuit boards. The First board functions as the controller and human machine interface, the second board functions as an intelligent controller for the actuators, solenoids, and air compressor related to controlling the chair recline postion and the chair's pneumatic suspension.The human machine interface board is called the Reline Control board, and the actuator controller is called the Recline Actuator Control board.
The system is split across two printed circuit boards for a couple of reasons, the signals from the switches and buttons are low voltage signals, running those signals through long wires would cause problems witha accurately reading the position of the rocker switches and buttons due to voltage drop, the LEDs in the 7 segment display have a low forward voltage and need to be close to the driving source for them to work, if the wire is too long voltage drop would prevent the LEDs from turning on, the other reason is the actuators and solenoids are high voltage signals and need to be mounted close to the control board. The Recline Control Board will be mounted on the arm rest of the users's dominant hand, it runs off 24V power and sends commands to the Recline Actuator control board via RS485 serial communication. The Recline Actuator Control board will be mounted in a secure location most likely at the botton of the chair between the chair and it the rolling chassis, it will be fed 24V power and connect to the Recline Control Baord via RS485.
Block Diagram:

Board Specs and Renders:
Recline Control...







 ravi butani
ravi butani

 Paul Kocyla
Paul Kocyla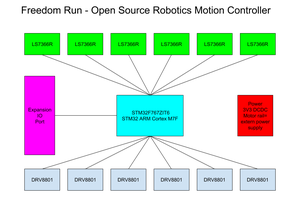
I'm disabled and almost at the point where I can't walk anymore and this is really something that will be beneficial for many people. I'm really looking forward to any updates and I really appreciate the work going in this. I have a lot of the components used so far, so I'm going to try and get one going as well. Good luck with everything!