 Naomi Pentrel
Naomi PentrelThis project creates a functional guardian with a servo, a camera, some LEDs and the Viam ML Model service and Vision Service.
0%
0%
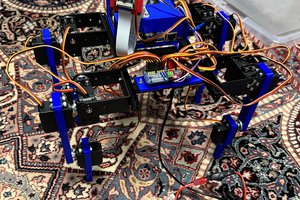
Guardian Robot that tracks Humans and Dogs
Print, Paint, and Program a Guardian to Track Humans and Dogs Using a Pi, Camera, and Servo
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 Richard Sand
Richard Sand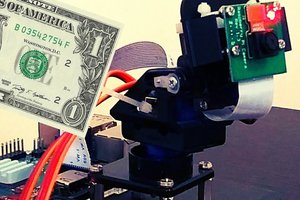
 Norbert Zare
Norbert Zare
 Afreez Gan
Afreez Gan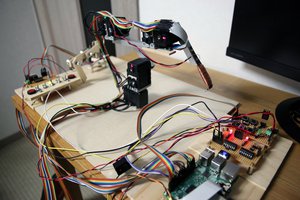
 Tobias Kuhn
Tobias Kuhn