Gaultier Lecaillon
Gaultier Lecaillon-
Robot Random motions
11/11/2023 at 09:01 • 0 comments -
Avoidance Using RPLIDAR A2M8
09/05/2023 at 10:23 • 0 commentsThe RPLIDAR A2M8 by Slamtec is a versatile and compact LIDAR sensor commonly employed in robotics for navigation and obstacle detection.
LIDAR, which stands for Light Detection and Ranging, operates by emitting laser beams and then measuring the time it takes for those beams to return after reflecting off objects. This allows the RPLIDAR to generate a 360-degree map of its surroundings, effectively giving the robot a bird's eye view of its environment. When incorporated into a robot's control system, this data can be used to identify and avoid obstacles in real-time. The rapid scanning capability of the RPLIDAR A2M8, along with its high resolution, ensures that the robot can react promptly to any obstructions, be they static or moving.By integrating the RPLIDAR A2M8's data with path planning algorithms, robots can smoothly navigate through complex environments, avoiding collisions and ensuring efficient and safe operation.
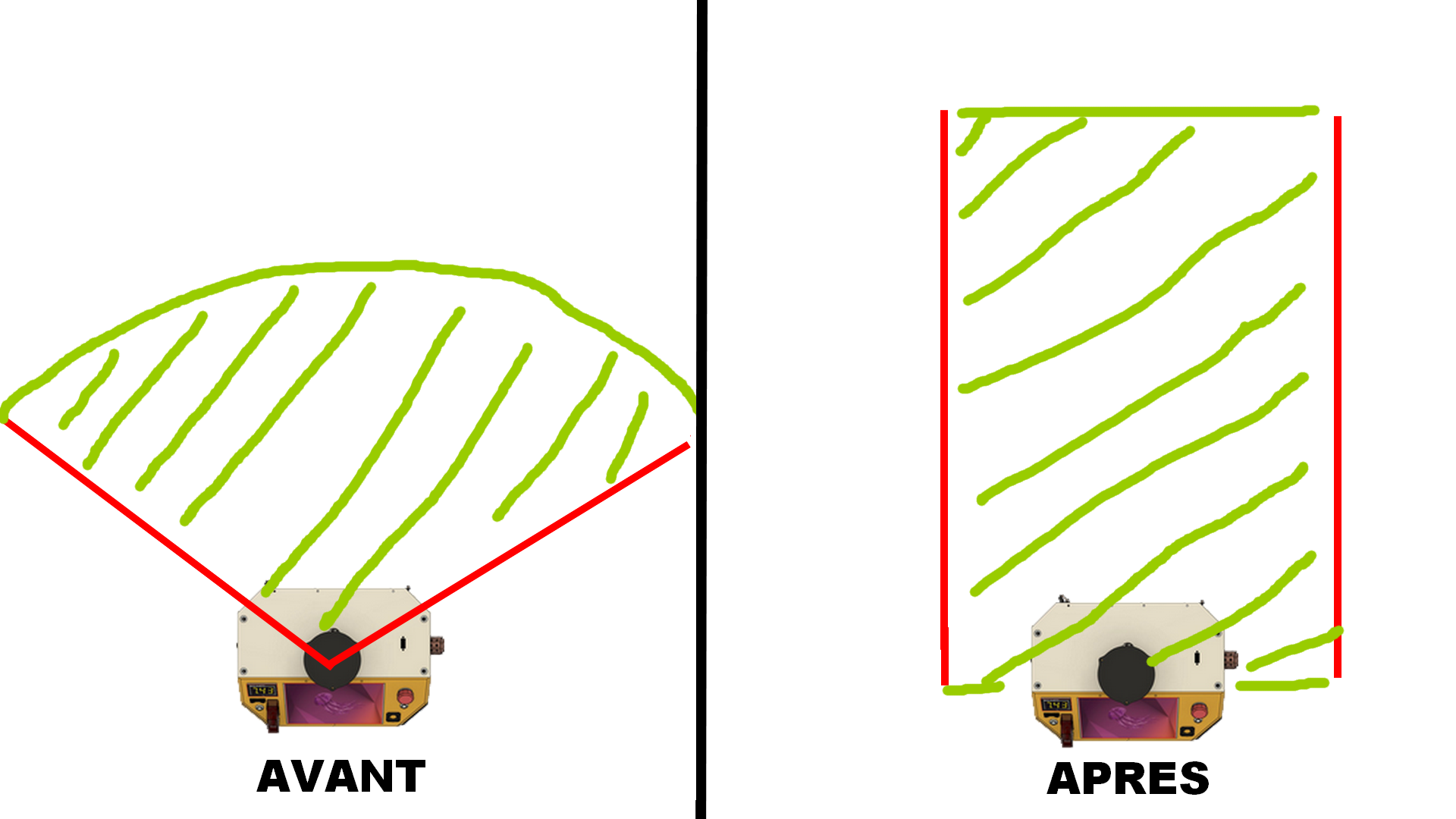
At first, we utilized a defined angle in front of the robot. If any obstacle was detected within this zone, we would halt the robot. However, this technique resulted in many blind spots and unnecessary stops. We now prefer to observe the area in front of the robot using a rectangular shape -
Pick up & Unstack Routine Demo
07/25/2023 at 13:06 • 0 commentsHere's a brief demonstration of the routine designed to pick up and unstack the three distinct layers according to their color codes.
-
Making custom wheels
05/28/2023 at 01:10 • 0 commentsRequirements
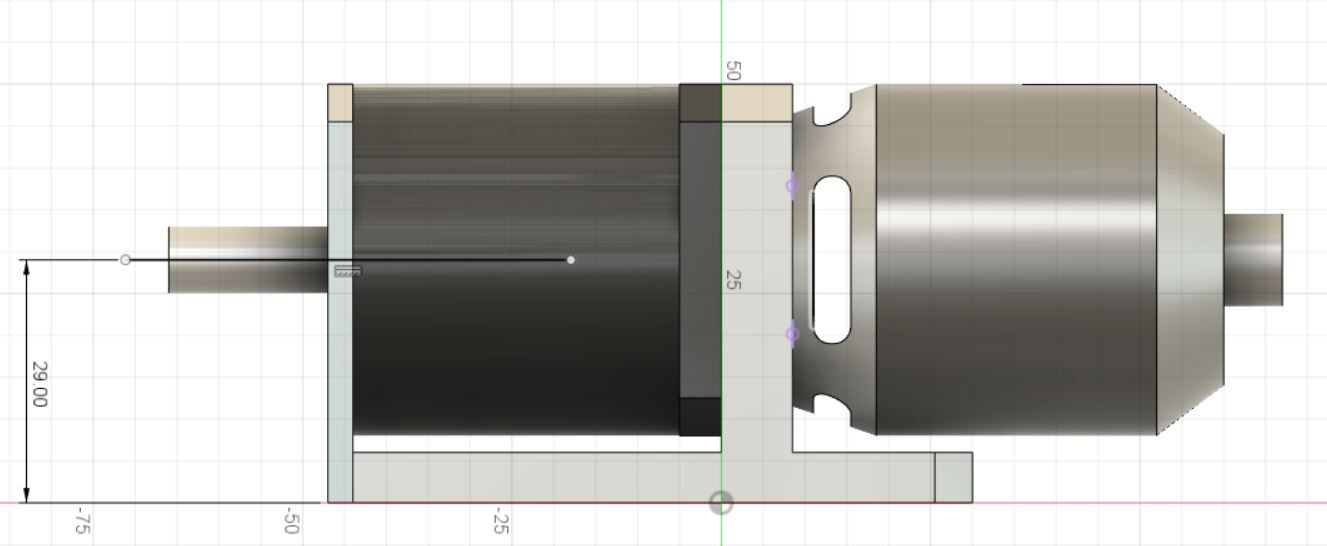
Having established our "motors block" we now need a suitable wheel. Our requirements for this wheel are as follows:- The Diameter
Given that the rotation axis is 29mm high, the aluminum chassis is 3mm thick, and the desired ground clearance for the robot is 7mm, we require a wheel that is exactly 78mm in diameter.
![]()
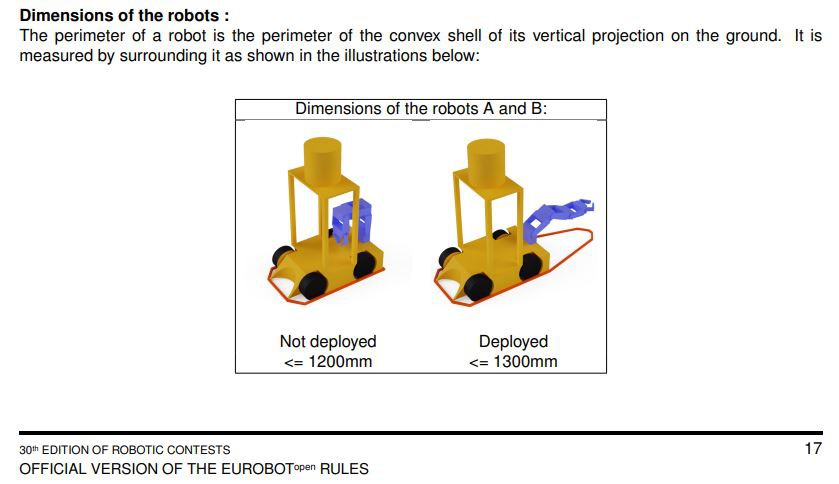
- Thickness
The Eurobot rules stipulate a maximum perimeter for the robot, which permits us to have a wheel thickness between 25 and 30 mm.
![]()
- Grip
A good grip is vital for success in the competition. As our goal is precise movement, minimizing drift is essential to guarantee accurate position estimation without offsets. We are particularly interested in wheels with a hardness of 40 to 50 Shore. This specification aligns with softer options like silicone or polyurethane wheels.
- Mounting Hole
The output shaft has a diameter of 8mm, making it compatible with an M3 screw.
Conclusion
Taking into account all these requirements, we quickly recognized that finding such a specialized component in the market is nearly impossible. As a result, we concluded that designing and manufacturing our own wheel is necessary.
- The Diameter
-
Mobile base - Brushless x Odrive Board
05/28/2023 at 00:45 • 0 commentsContext
The mobility concept for the robot involves the use of two centrally located wheels and four height-adjustable pads at the corners of the chassis for stability. This arrangement facilitates smooth rotations without altering the robot's x and y position within its environment.
![]()
![]()
Objectives
Our primary goal is to construct a robot that exhibits exceptional precision in its movement. It is essential for us to consistently know the robot's exact position in terms of x and y coordinates, as well as its theta (orientation). We aim for an accuracy of 1mm, which will enable precise actions during matches.
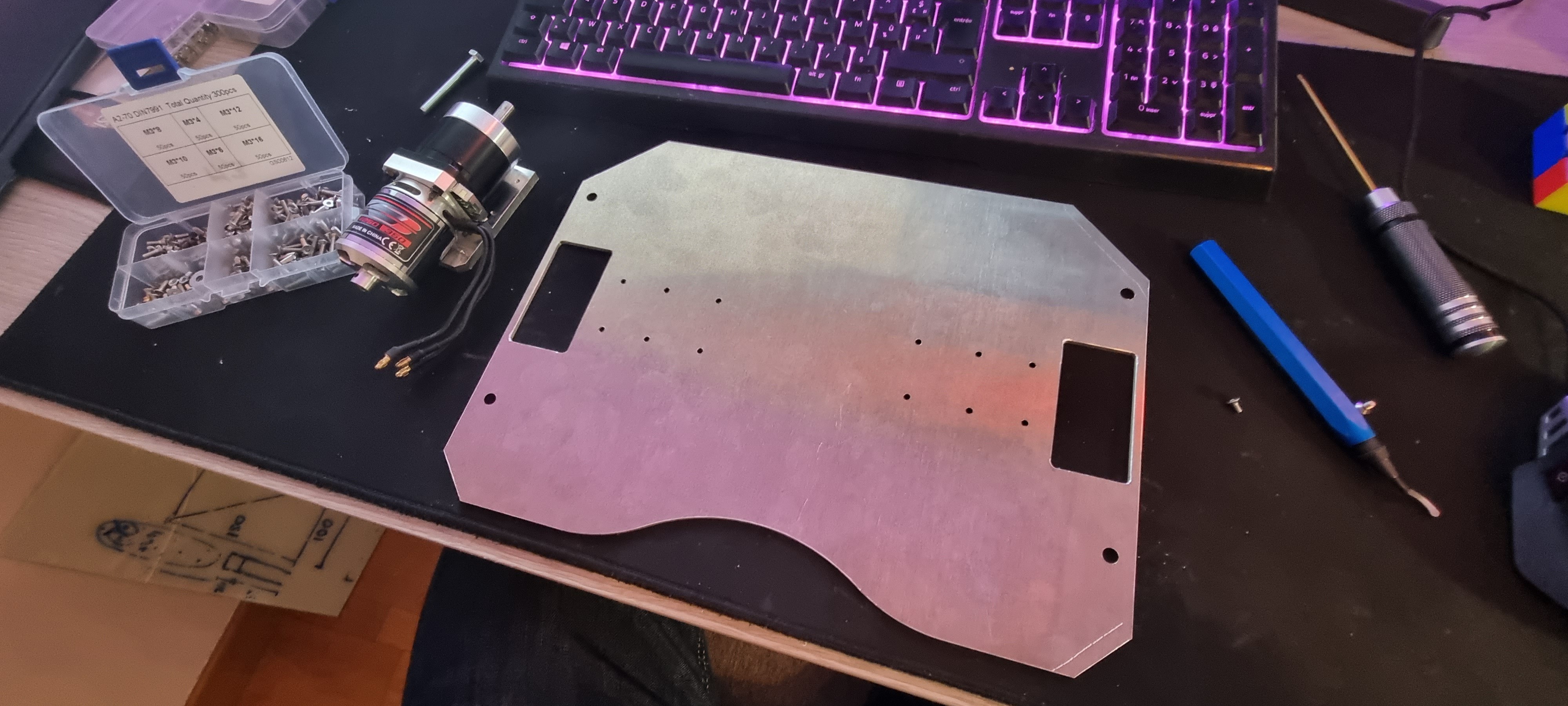
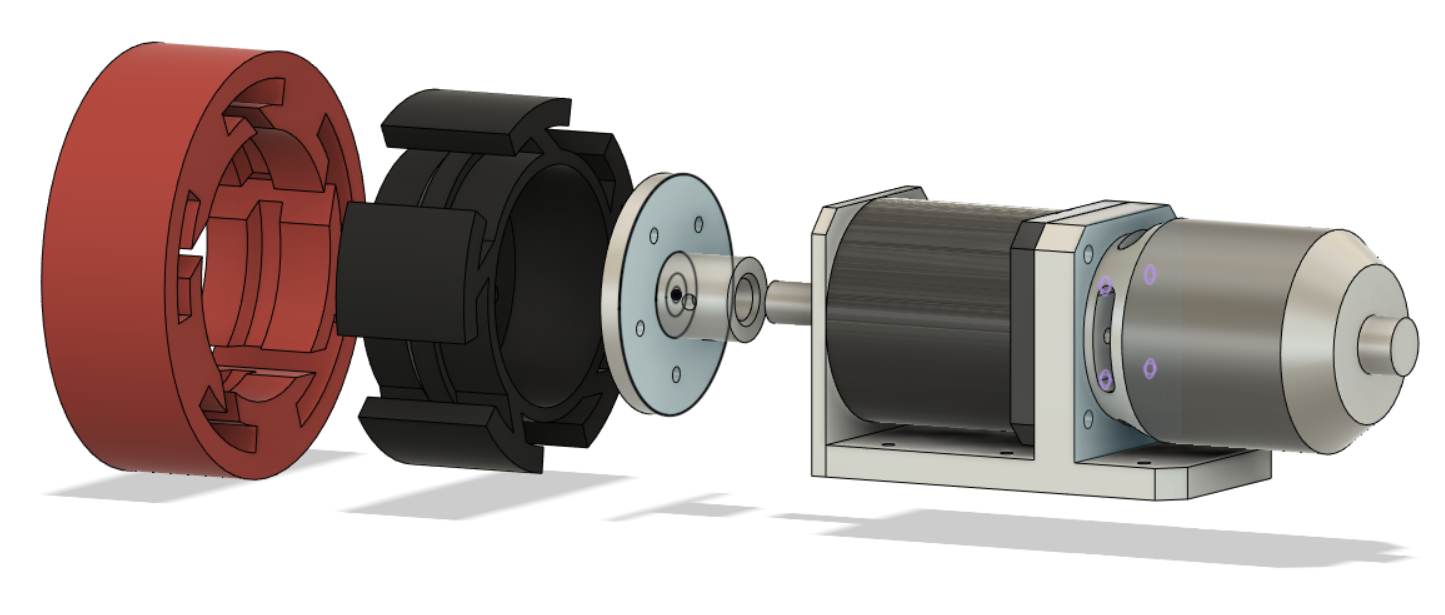
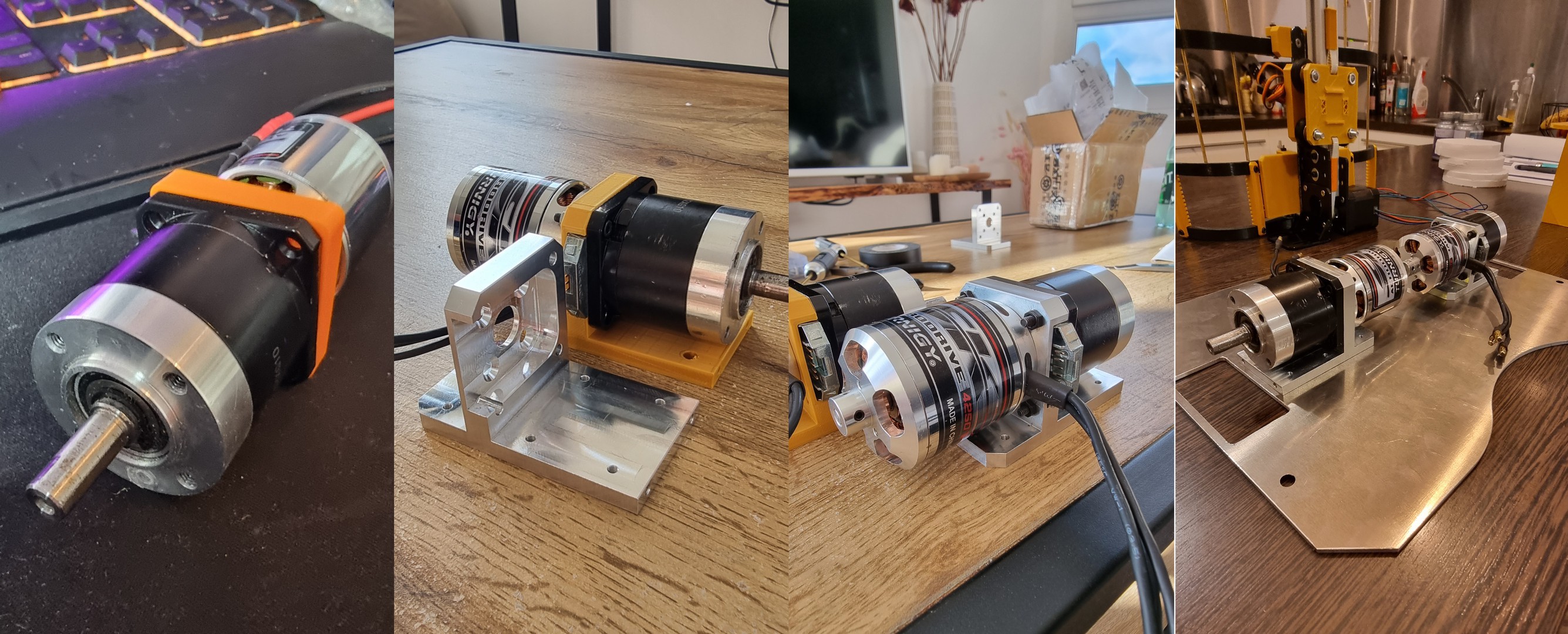
Motorization
We are utilizing two Brushless Motors (Aerodrive SK3 - 4250-350kv) coupled with a 10:1 planetary gear (originally designed for NEMA 17 stepper motors). This setup offers us an optimal balance of torque and speed.
For closed-loop motor control, a mount is used to join the motor to the reducer, with an encoder integrated into the assembly.
![]()
![]()
(This design was inspired by Skyentific)
Odrive
Both motors and encoders are directly connected to an Odrive 3.6 board. This advanced board enables fine-tuned control of the robot's movement. We can adjust parameters such as PID, acceleration, deceleration, velocity, and more, to achieve precise motion control. Furthermore, real-time feedback from the encoders can be broadcast on a ROS2 topic and utilized by our Python code.
All these aspects will be handled on the operating system side, empowering us to transmit dynamic commands to the robot based on sensor feedback, like from the LiDAR, enabling features such as obstacle avoidance."
Motion Demo with Odrive 3.6
Eurobot Competition - Edog Robot 2023
Open-Source Eurobot Competition Robot: ROS2 Code for Raspberry Pi 4 with Detailed Documentation in Progress