 Mark Austin
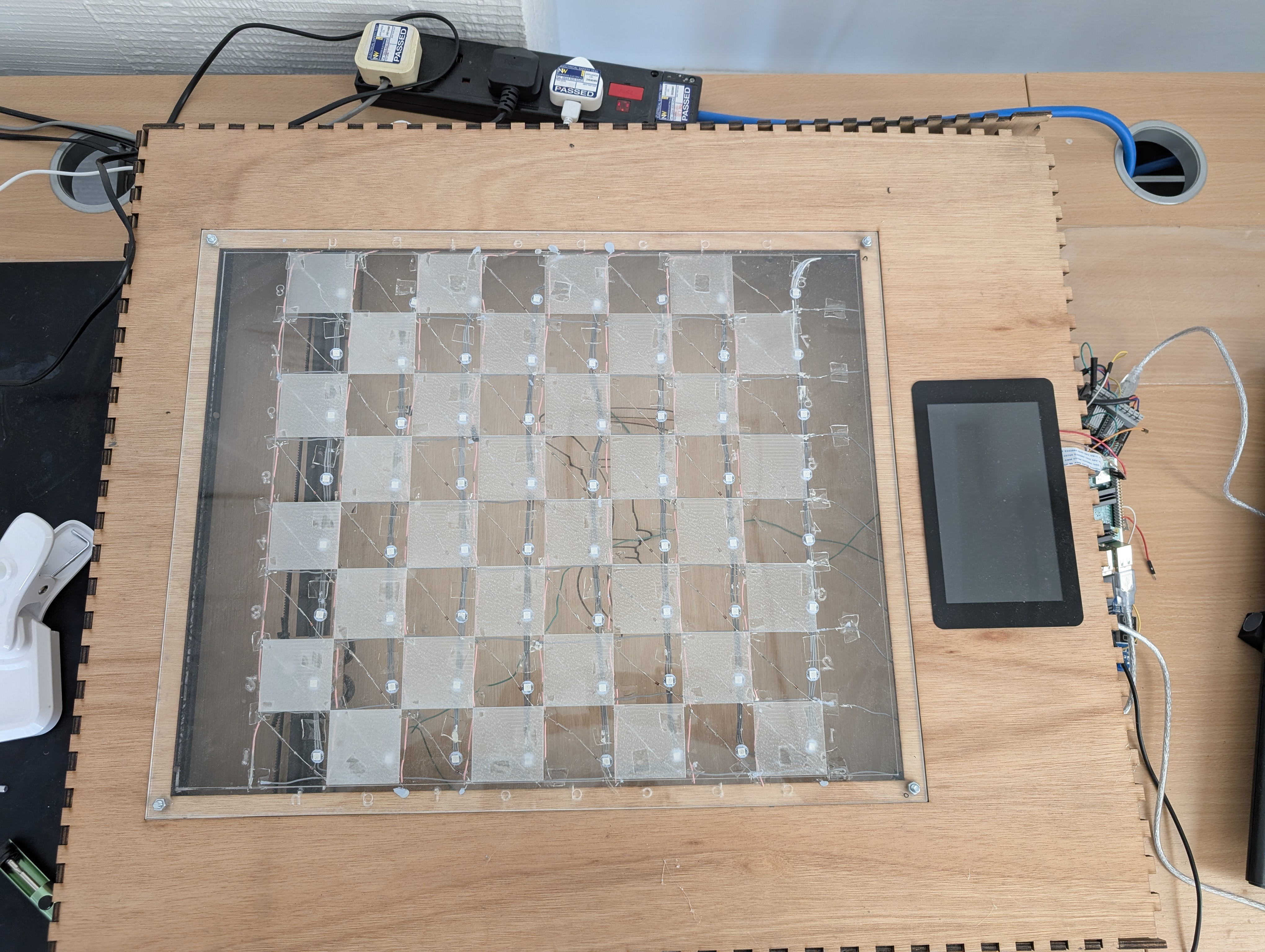
Mark AustinOur first attempt at this project was two years ago, when we built the board using a Core-XY mechanism. While we managed to detect and move pieces—and even provide suggestions using a NeoPixel LED matrix—the board was big and clunky due to the Core-XY system. On top of that, our detection matrix electronics were unreliable.
Chess Board V1:
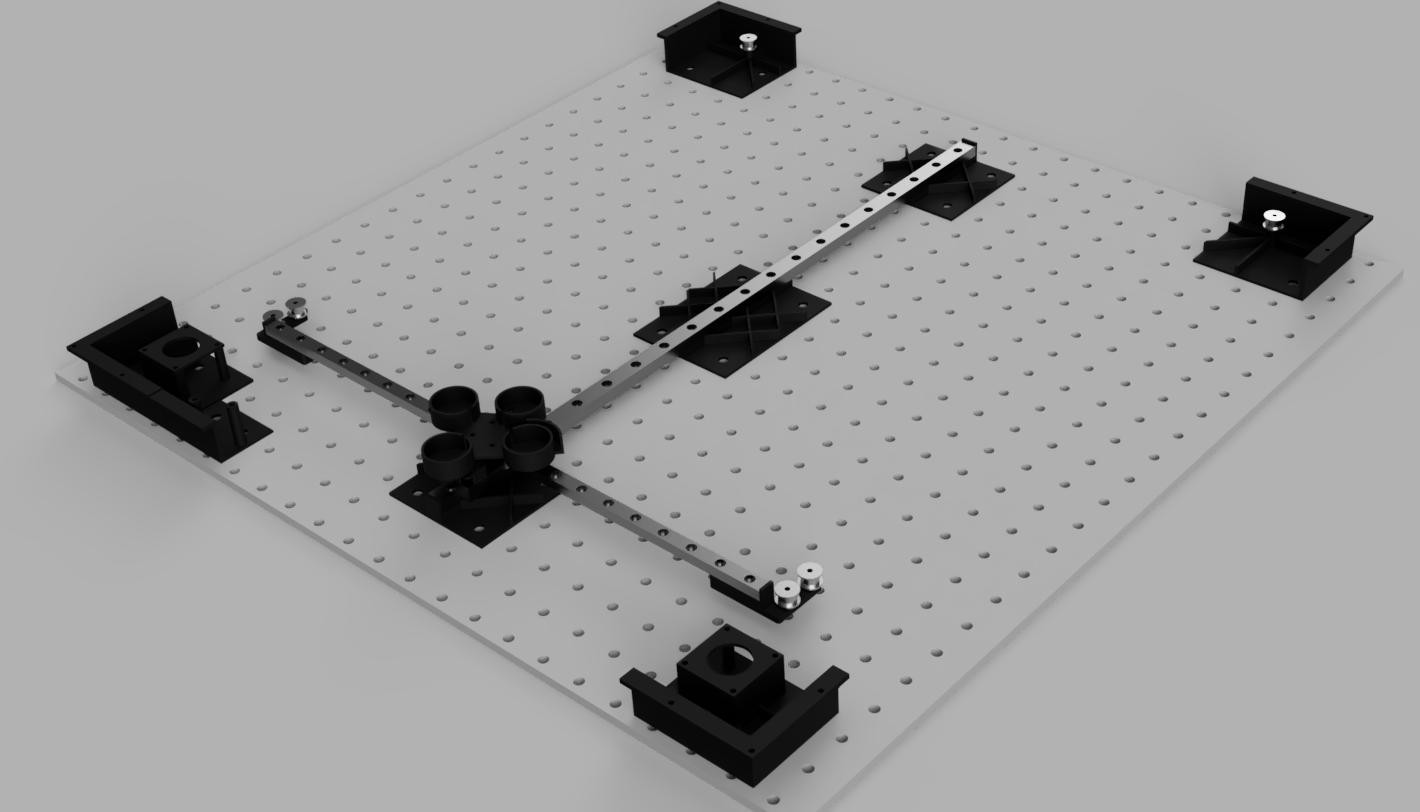
Since then, one of our main goals has been to shrink the board as much as possible. For Version Two, we achieved this by switching to a T-Bot mechanism for the magnets. This significantly reduced the board’s size, as the movement mechanism no longer dictated its overall dimensions.
Chess Board Version 2 (Render):
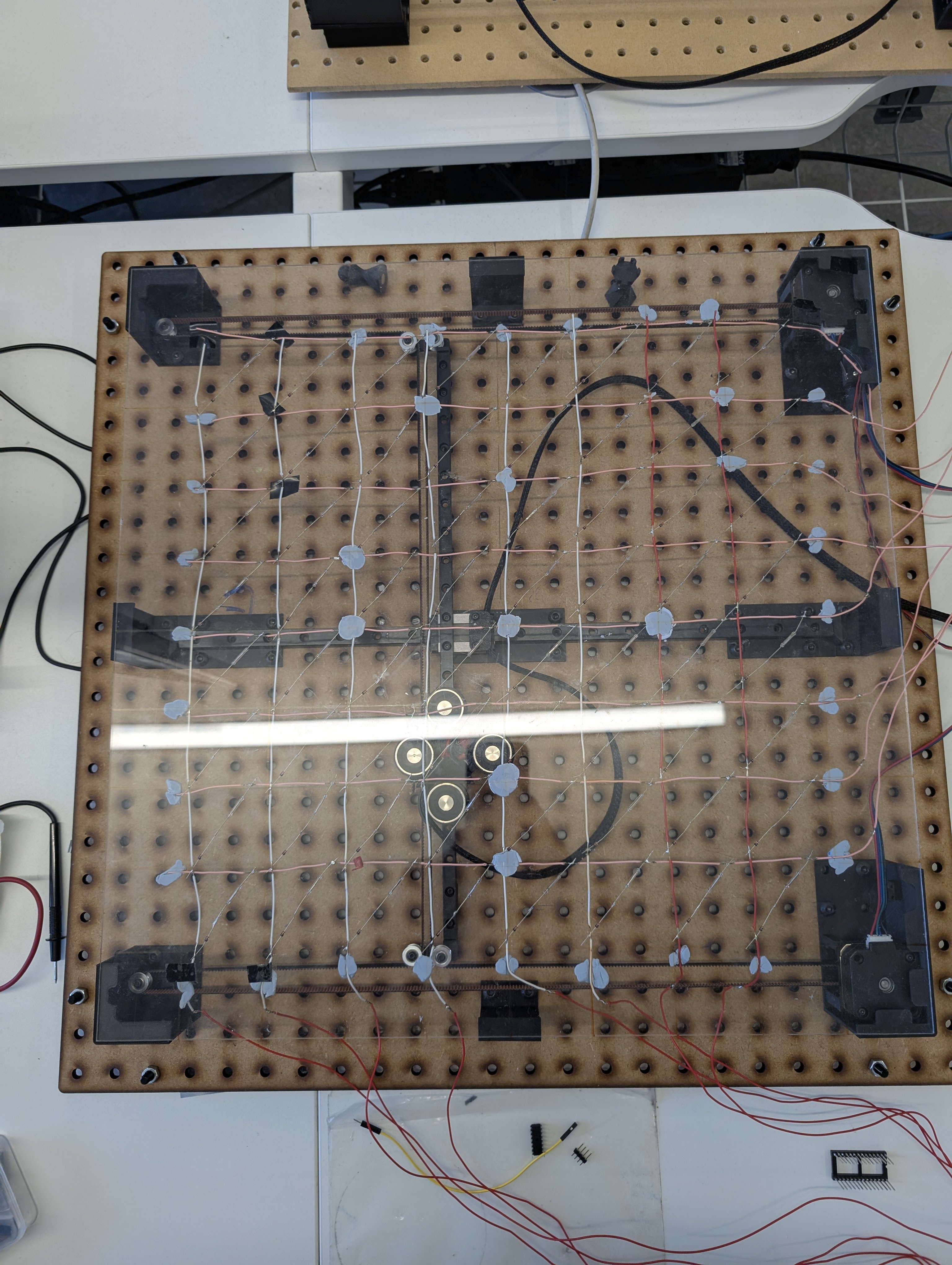
Chess Board Version 2 (Physical):
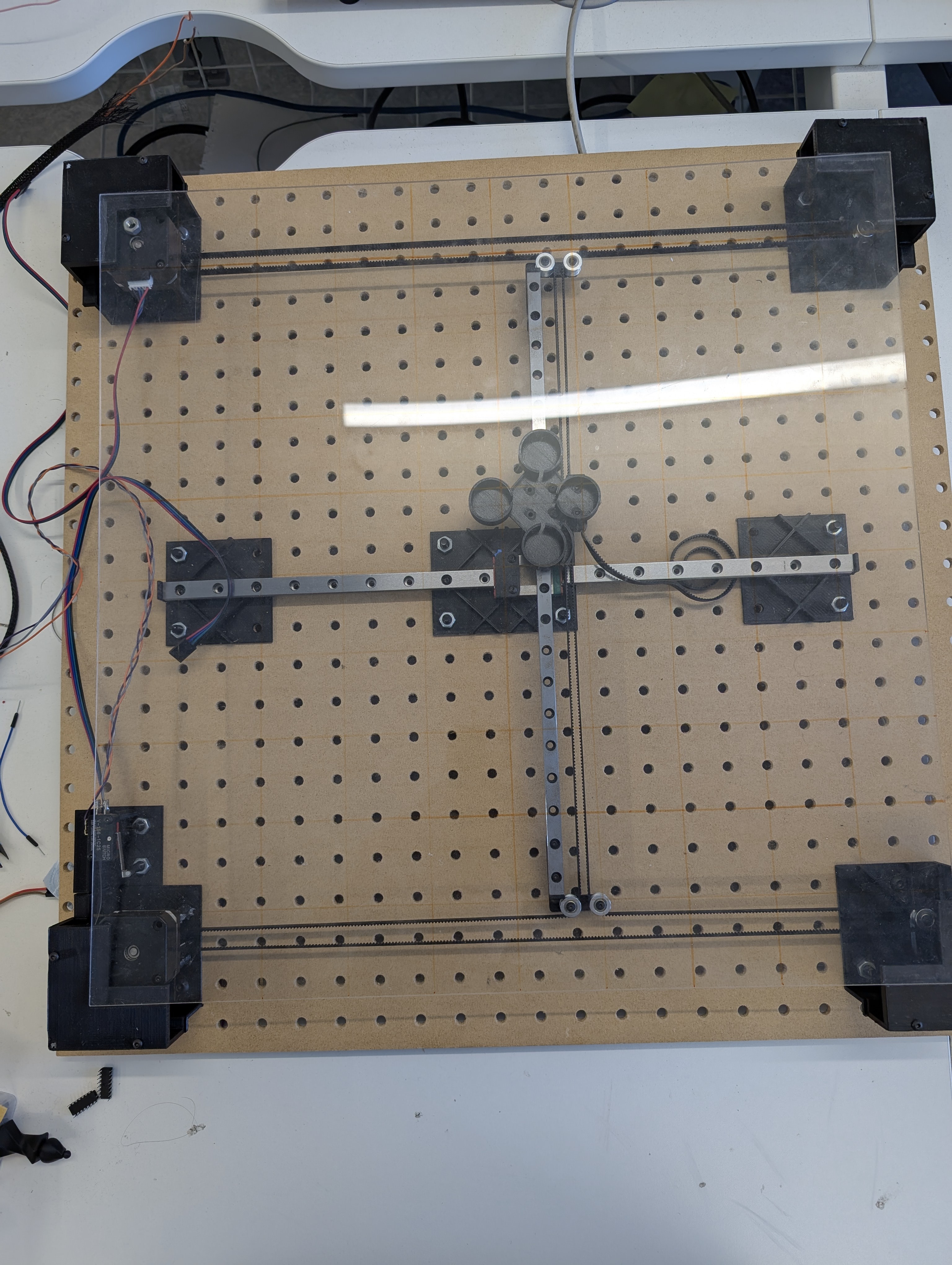
However, while this redesign successfully made the board more compact, it introduced new challenges:
- The limit switch mount was too flimsy and could move—definitely a no-go.
- The acrylic board started sagging in the middle, which risked shorting the chess piece detection matrix.
- The motors and GT2 idler PEG board mounts were difficult to access, making motor installation a hassle.
Version 3: Fixing Version 2’s Issues
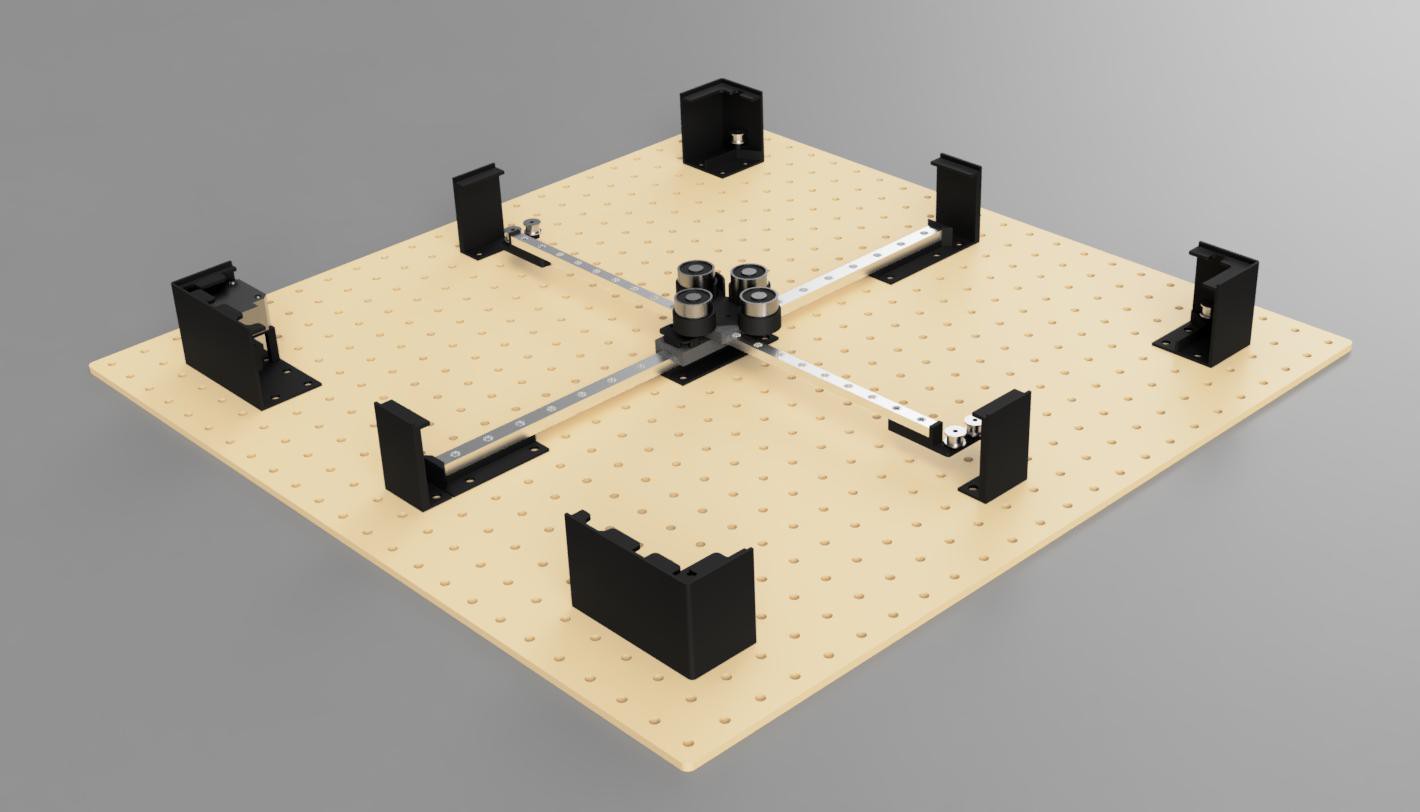
Version 3 addresses many of these problems:
- We added a border holder to prevent sagging, and the border is now more secure thanks to a snap-fit design.
- The outer border is even smaller.
- Mounting components to the PEG board is easier.
- Motor installation is much more accessible.
- The limit switch holder is now integrated into the motor mounts, so it can’t move.
Chess Board Version 3 (Render):
Chess Board Version 3 (Physical):
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.