0%
0%
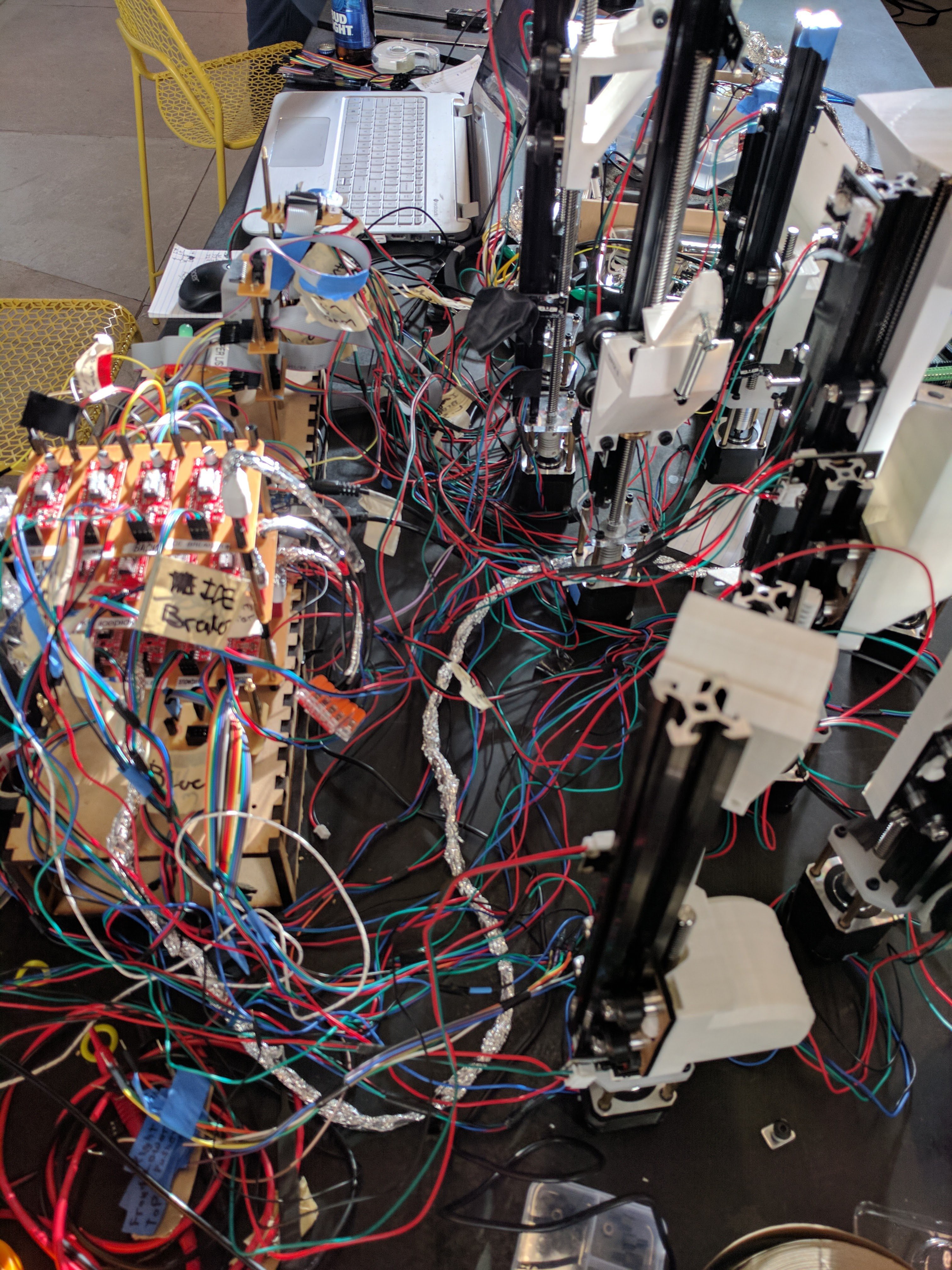
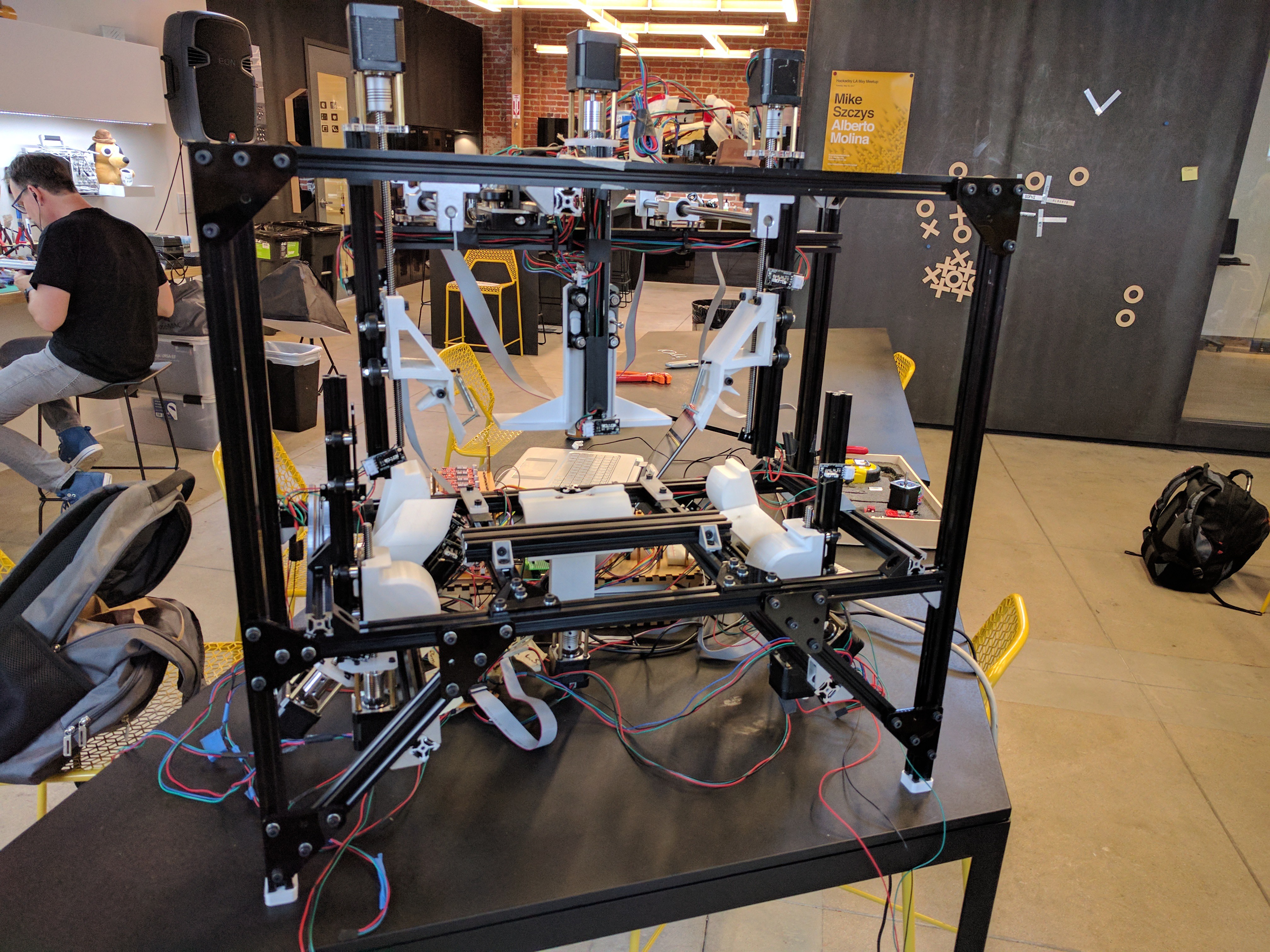
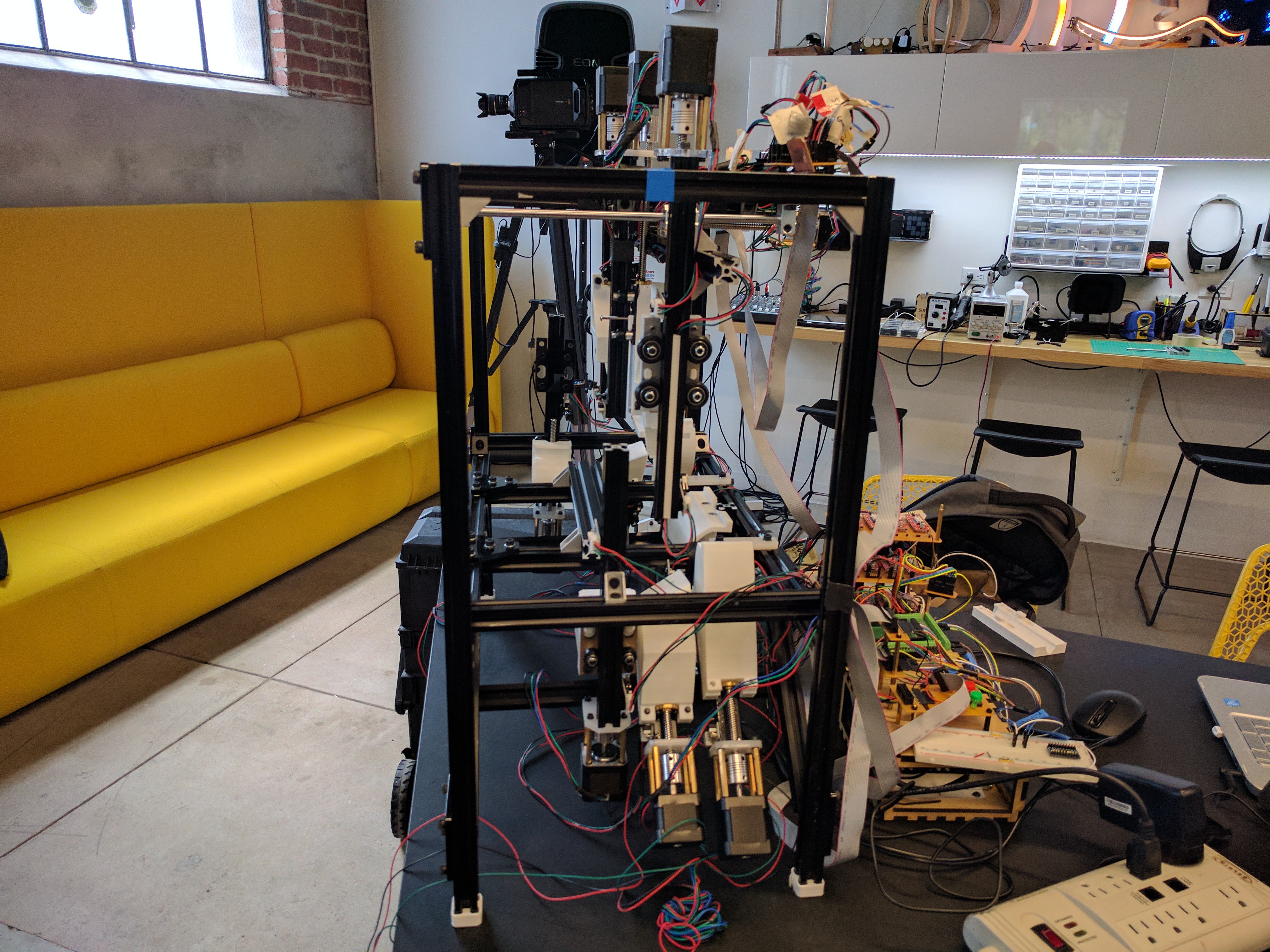
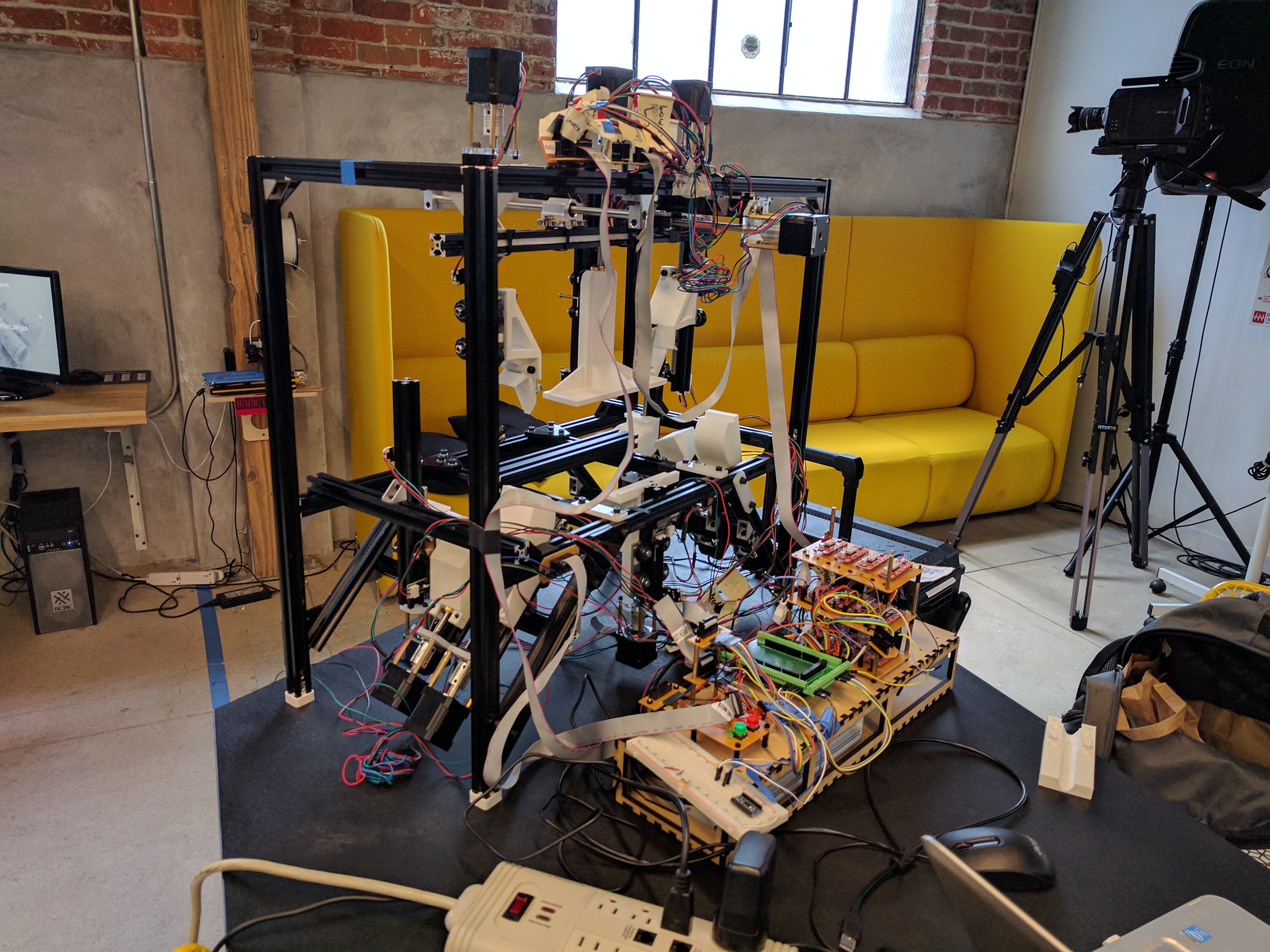
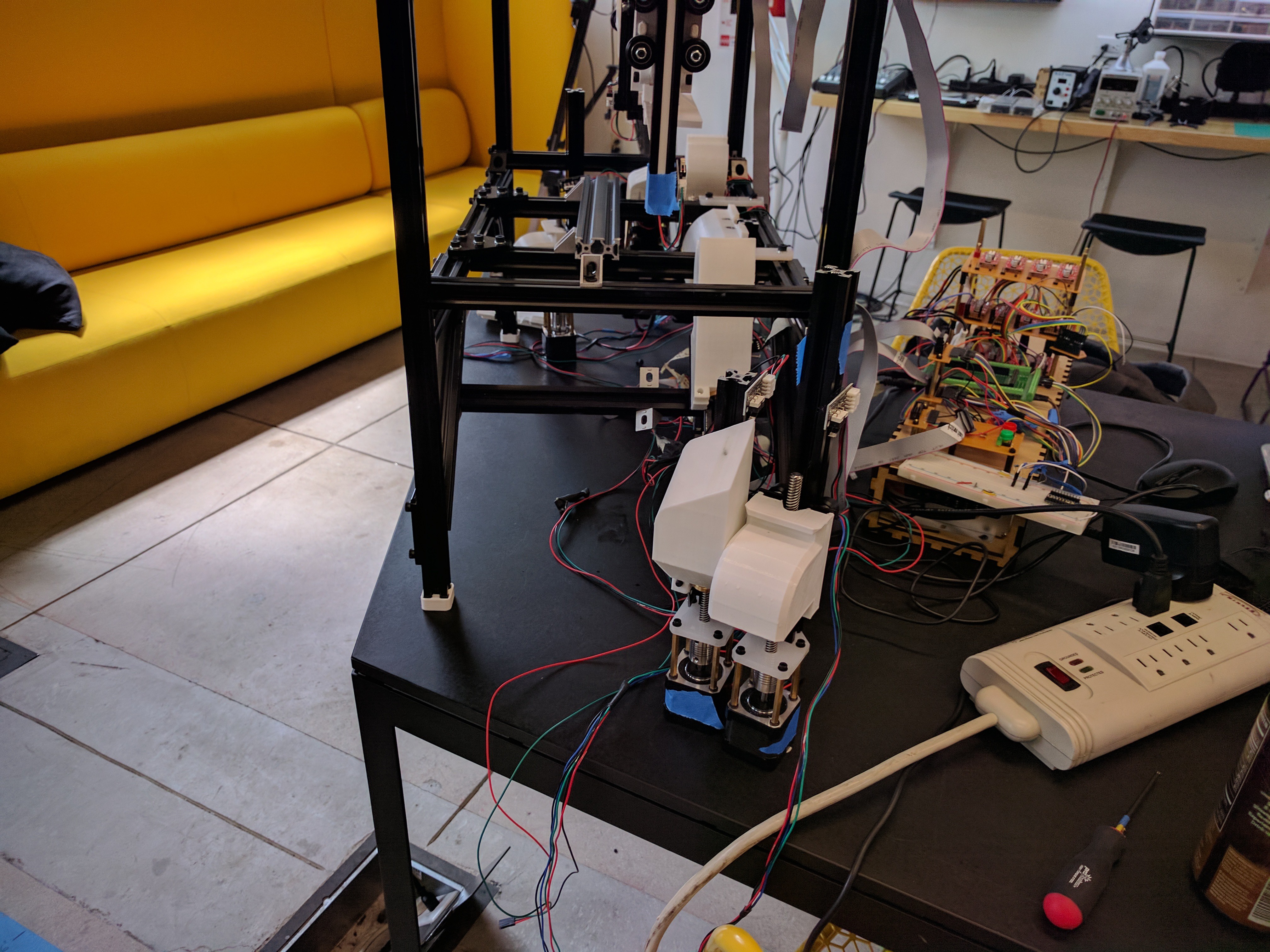
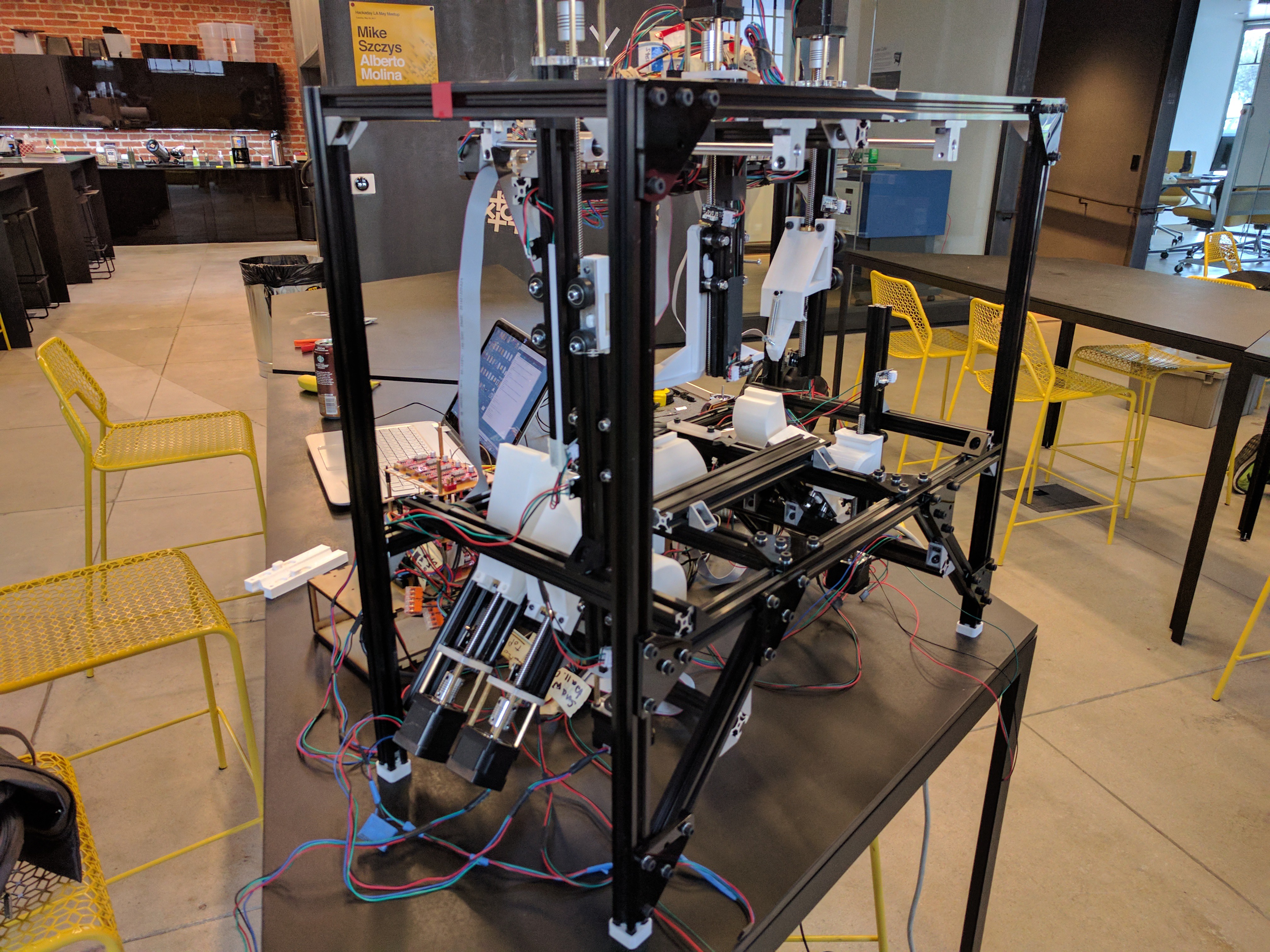
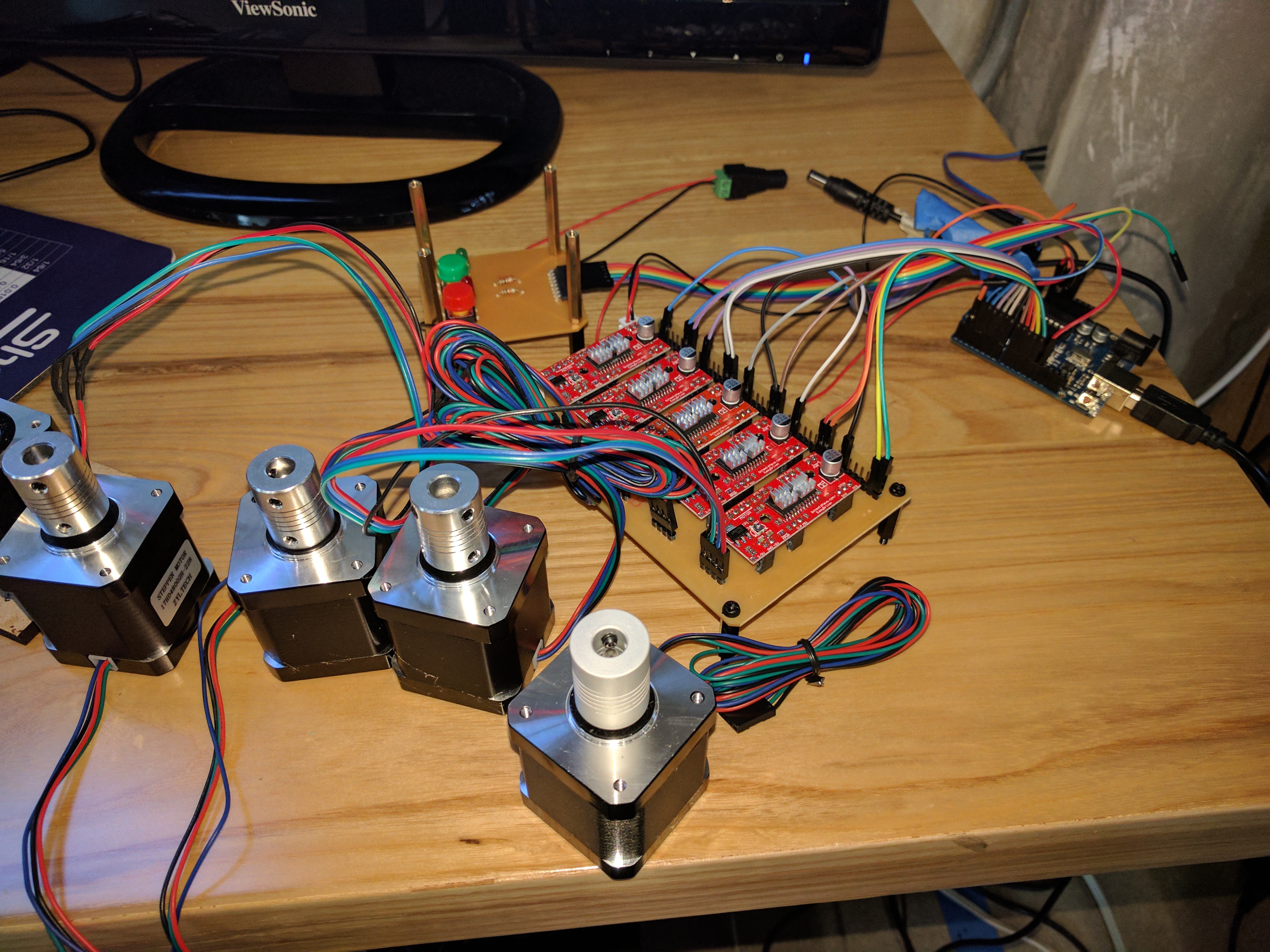
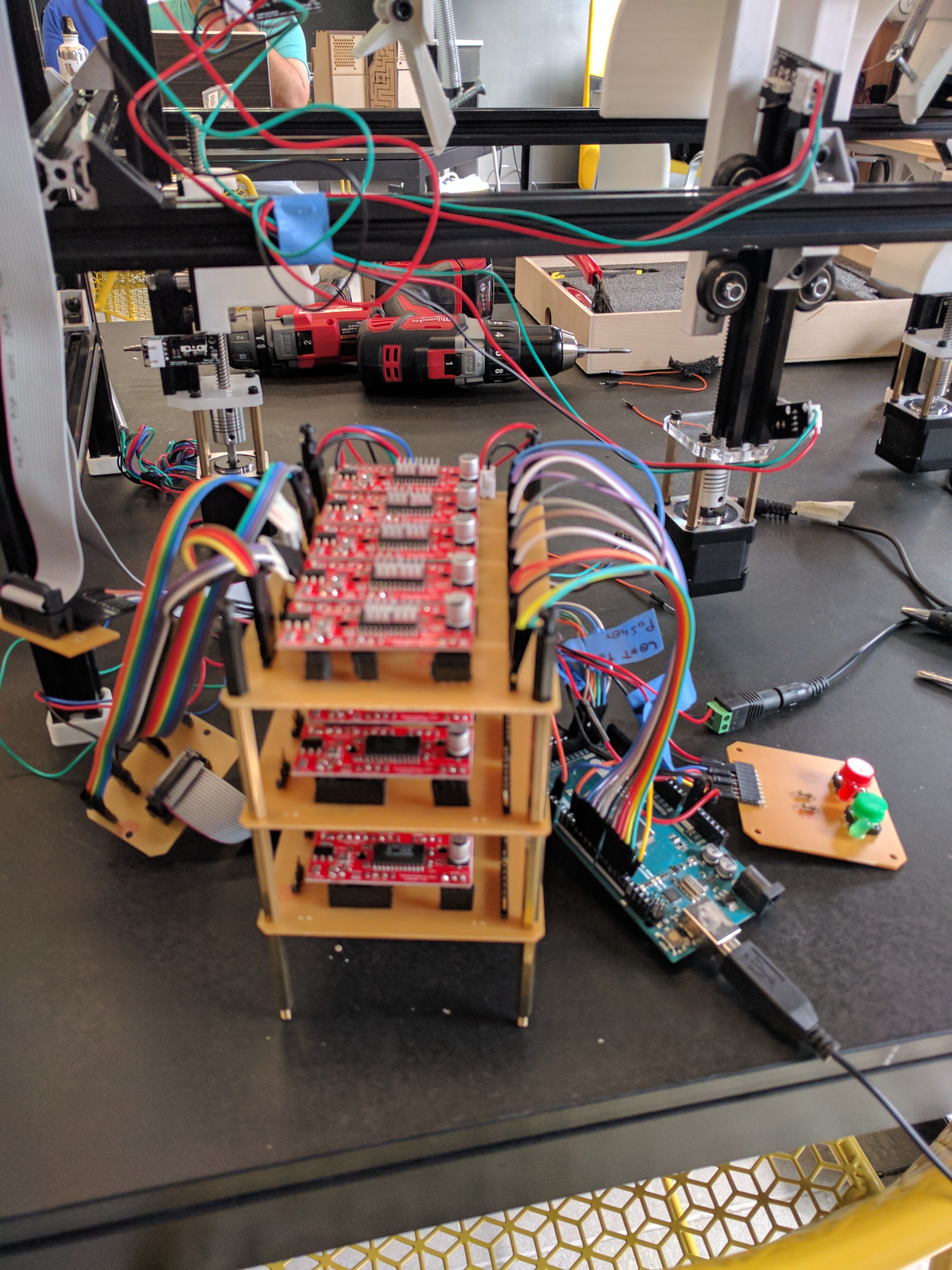
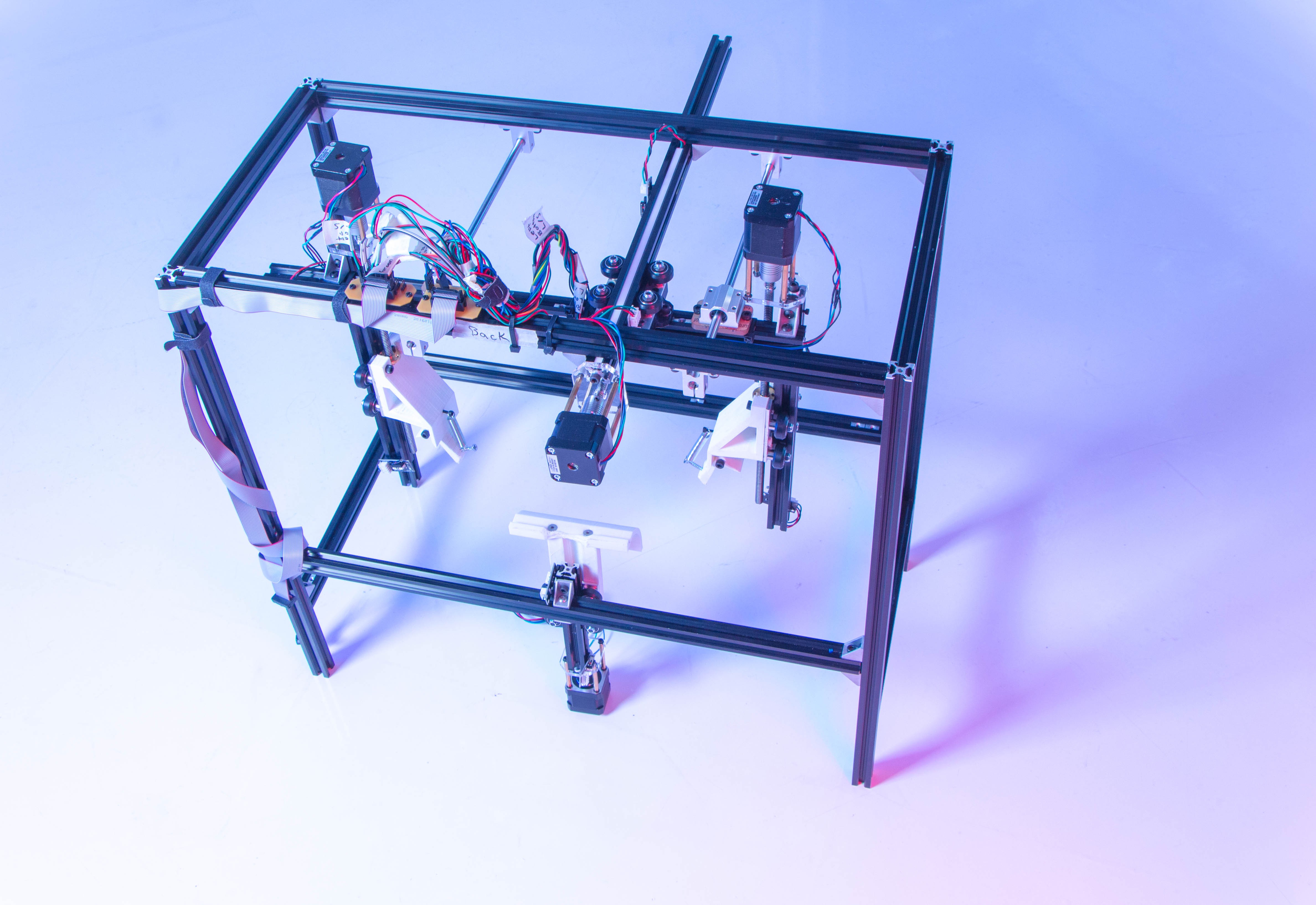
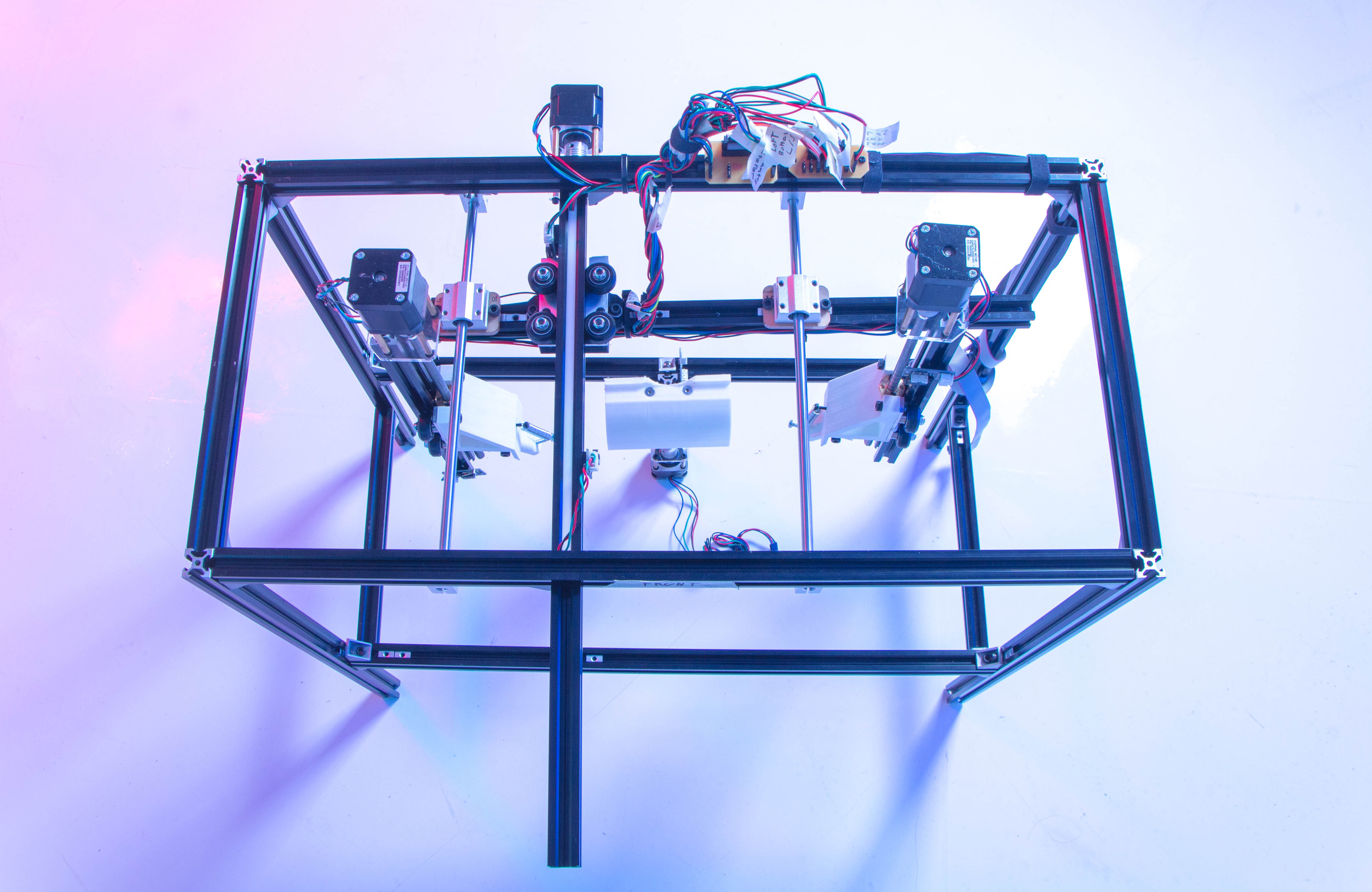
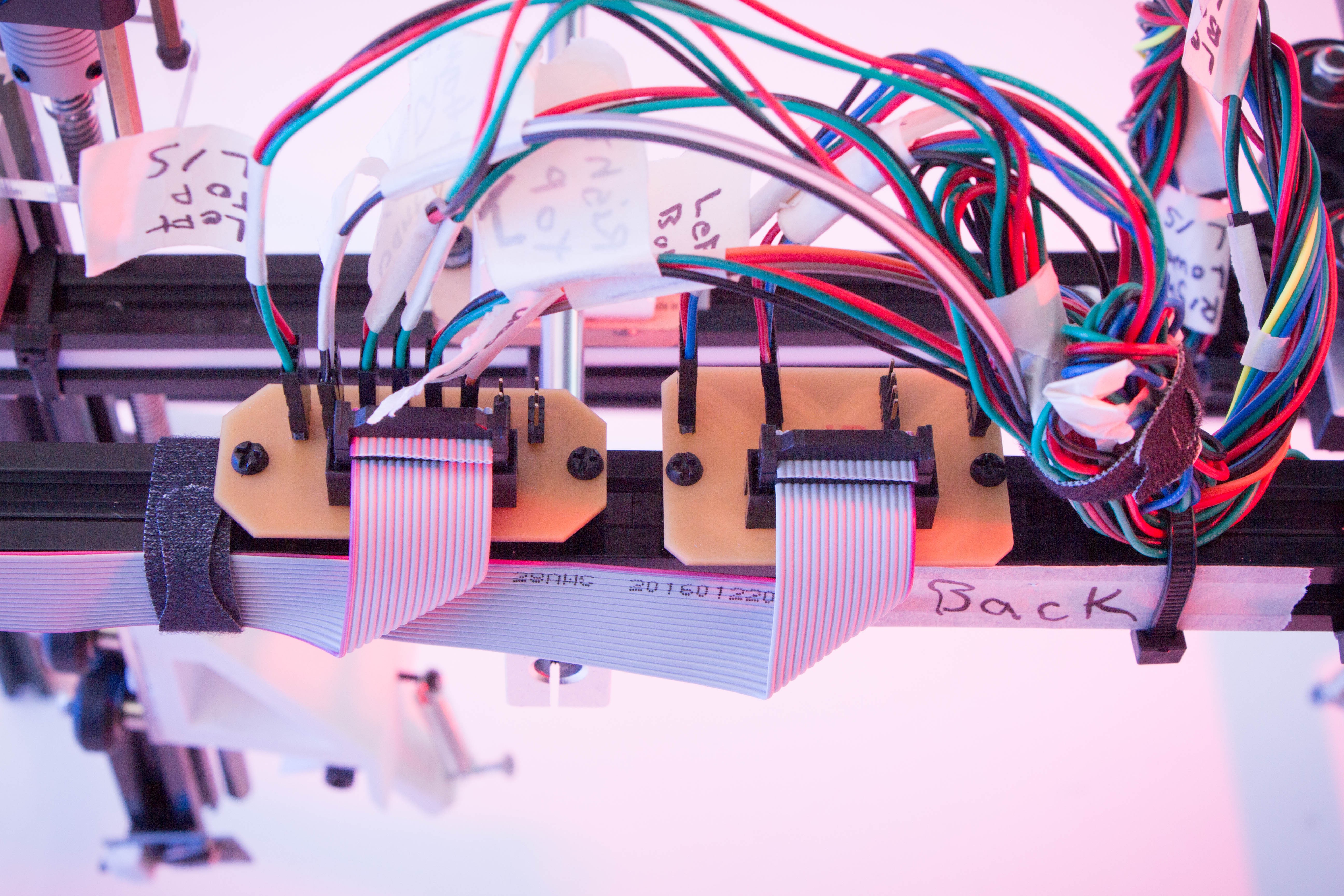
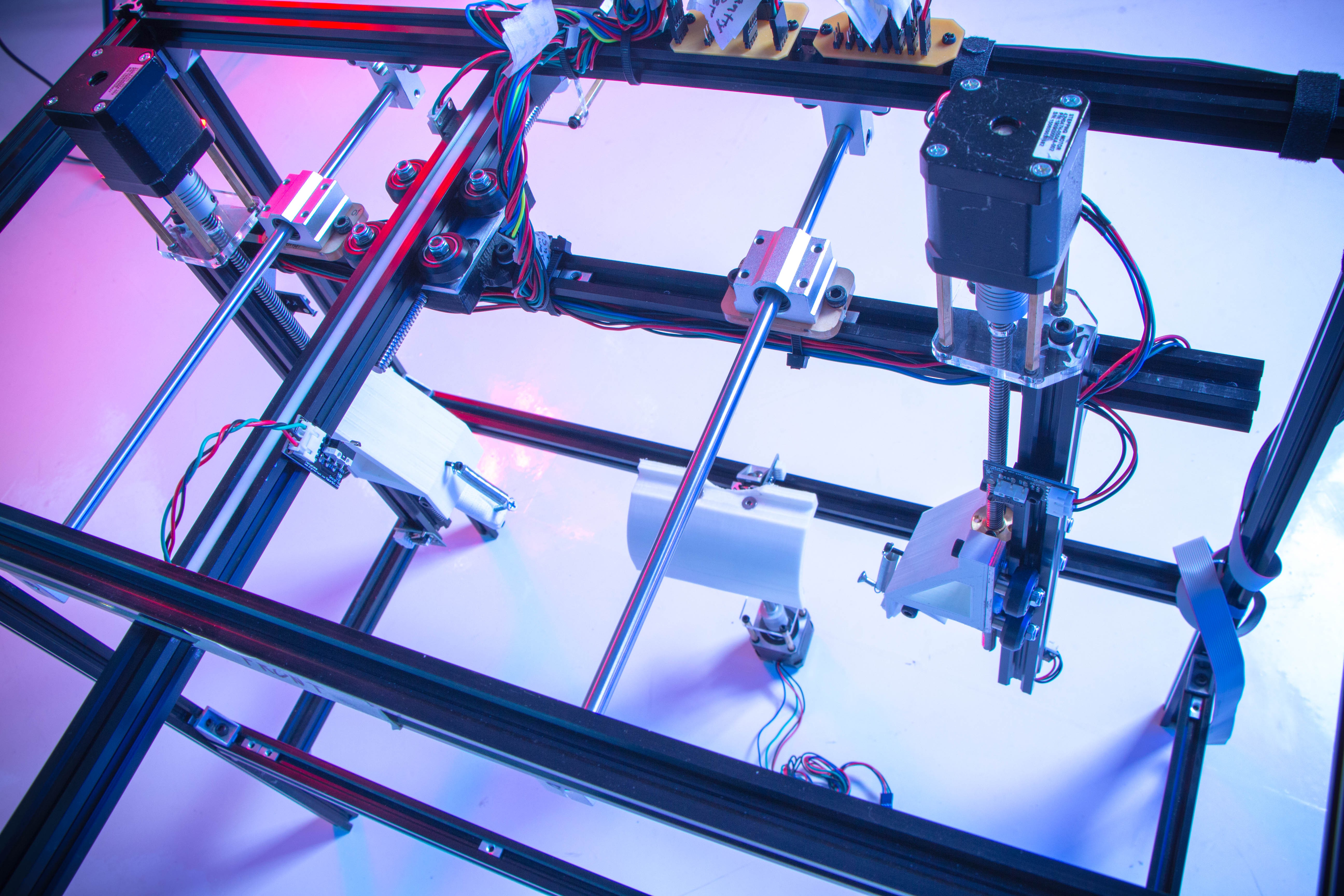
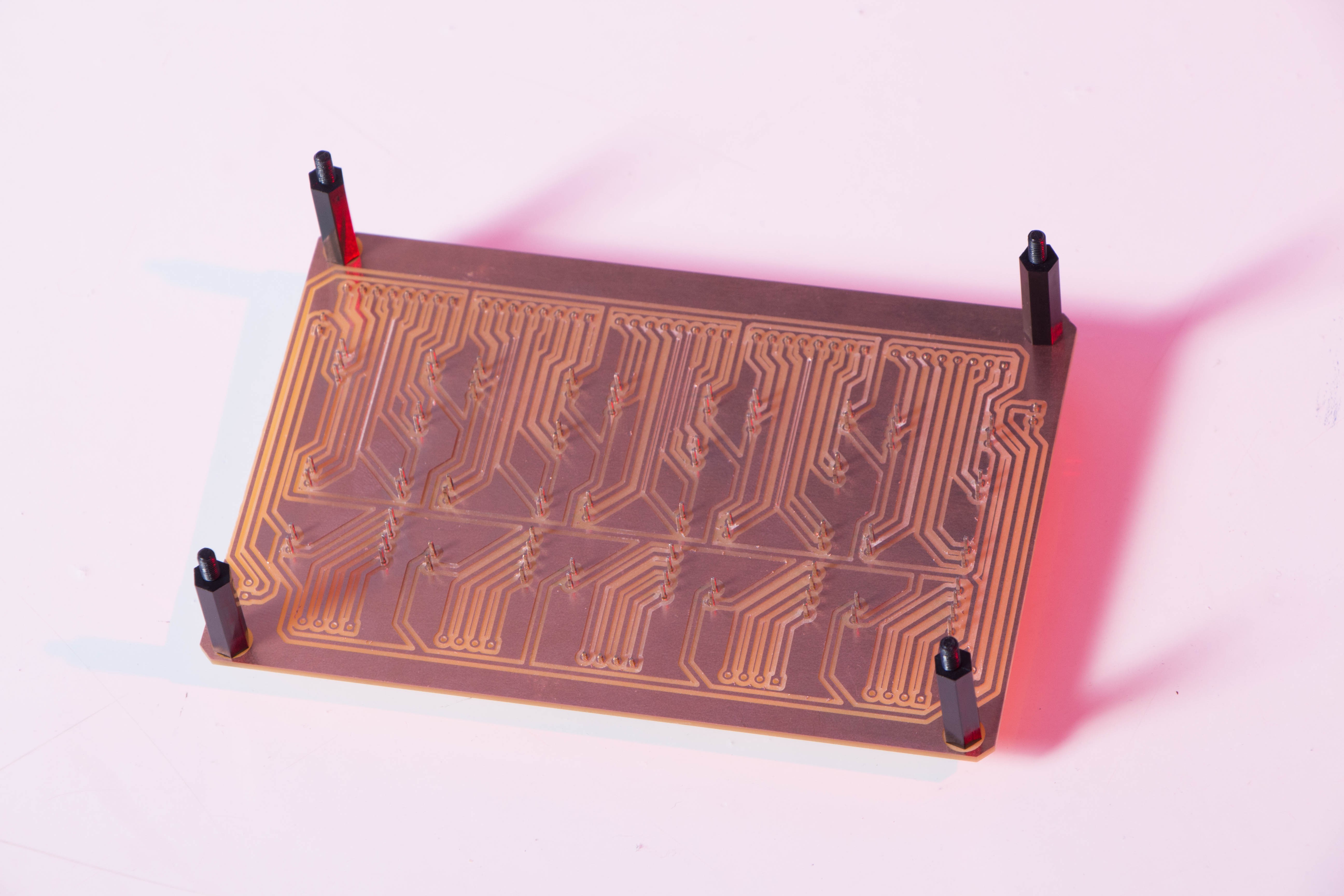
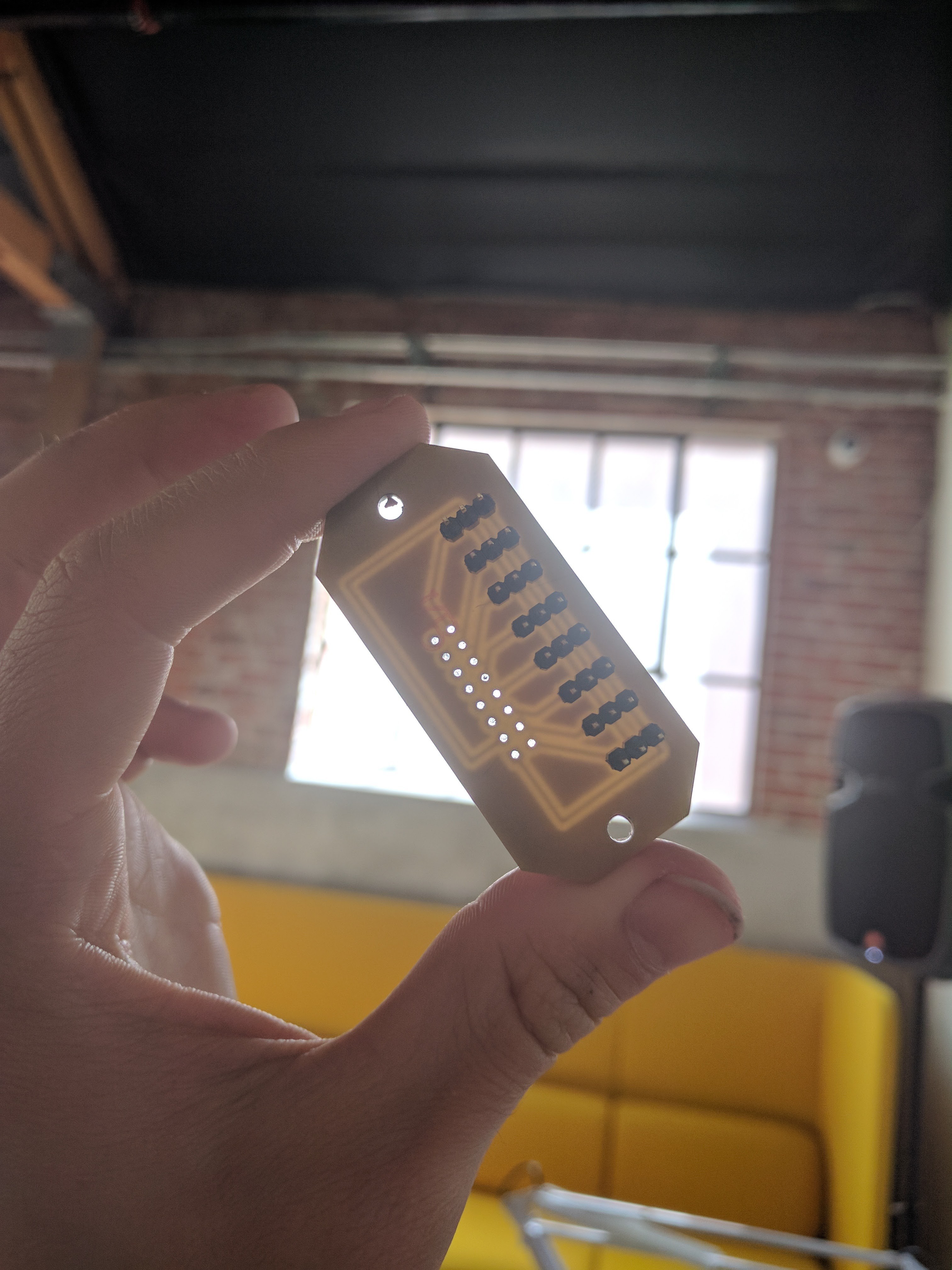
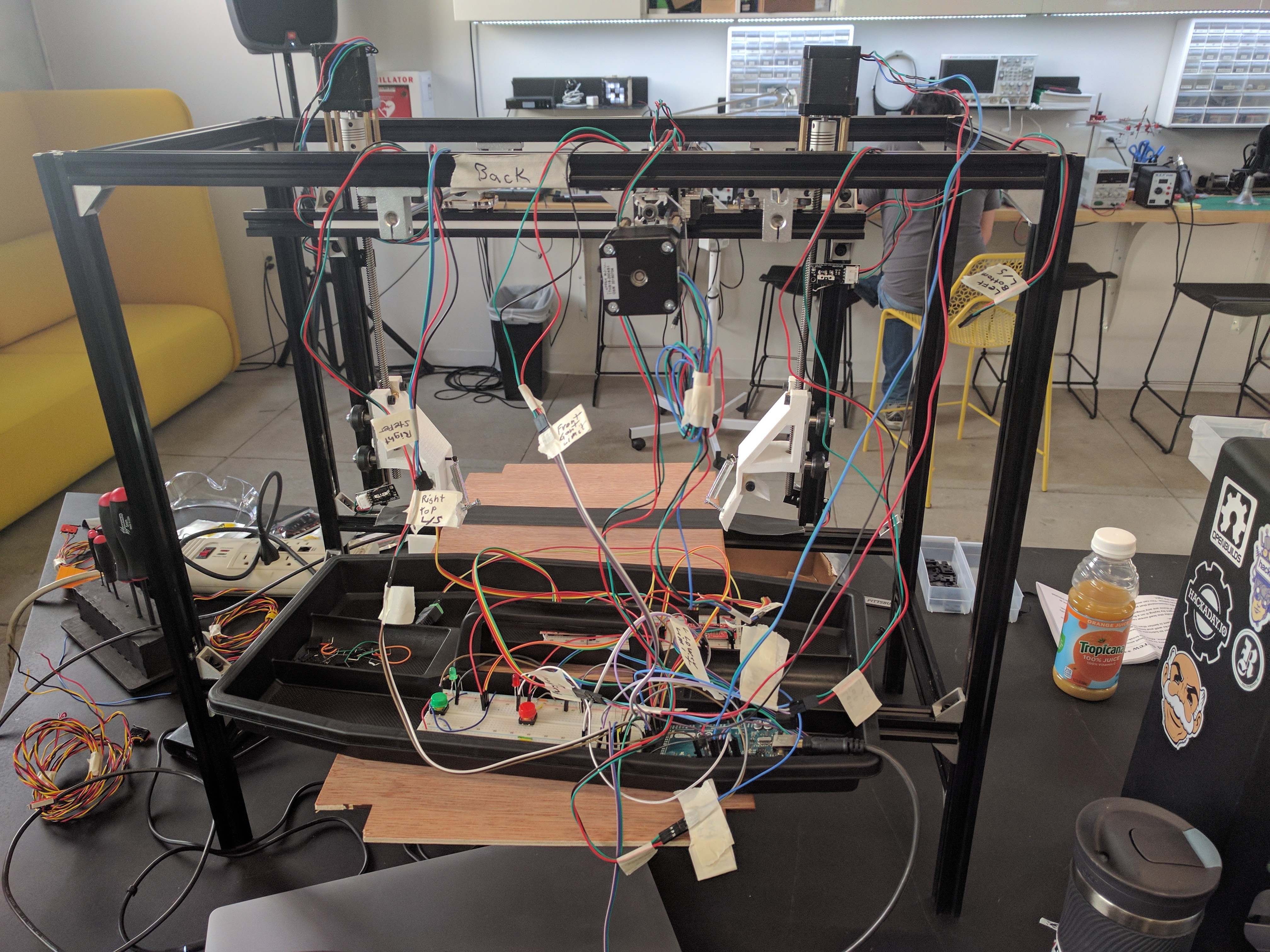
AutoFold the Box Folding Robot
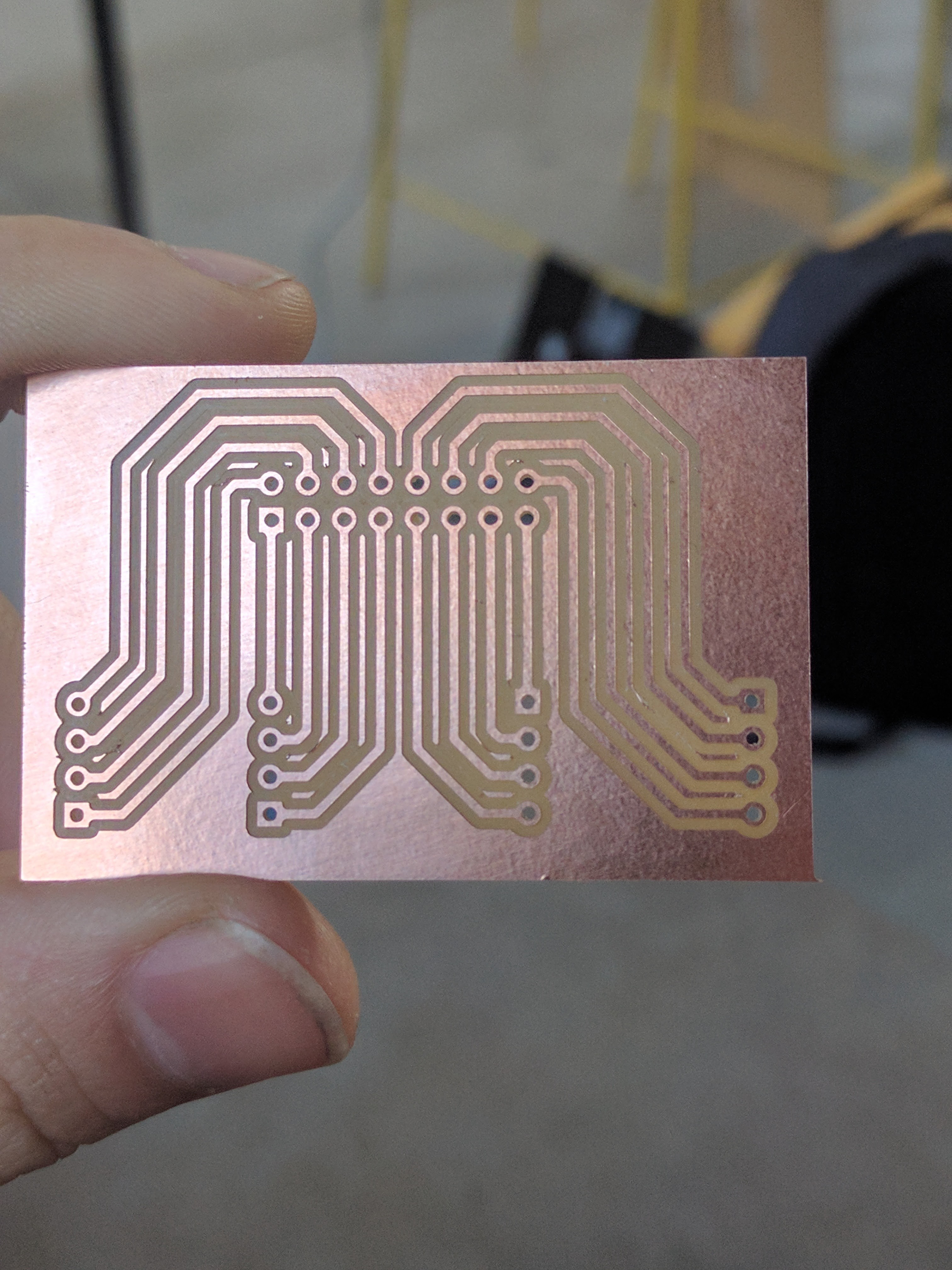
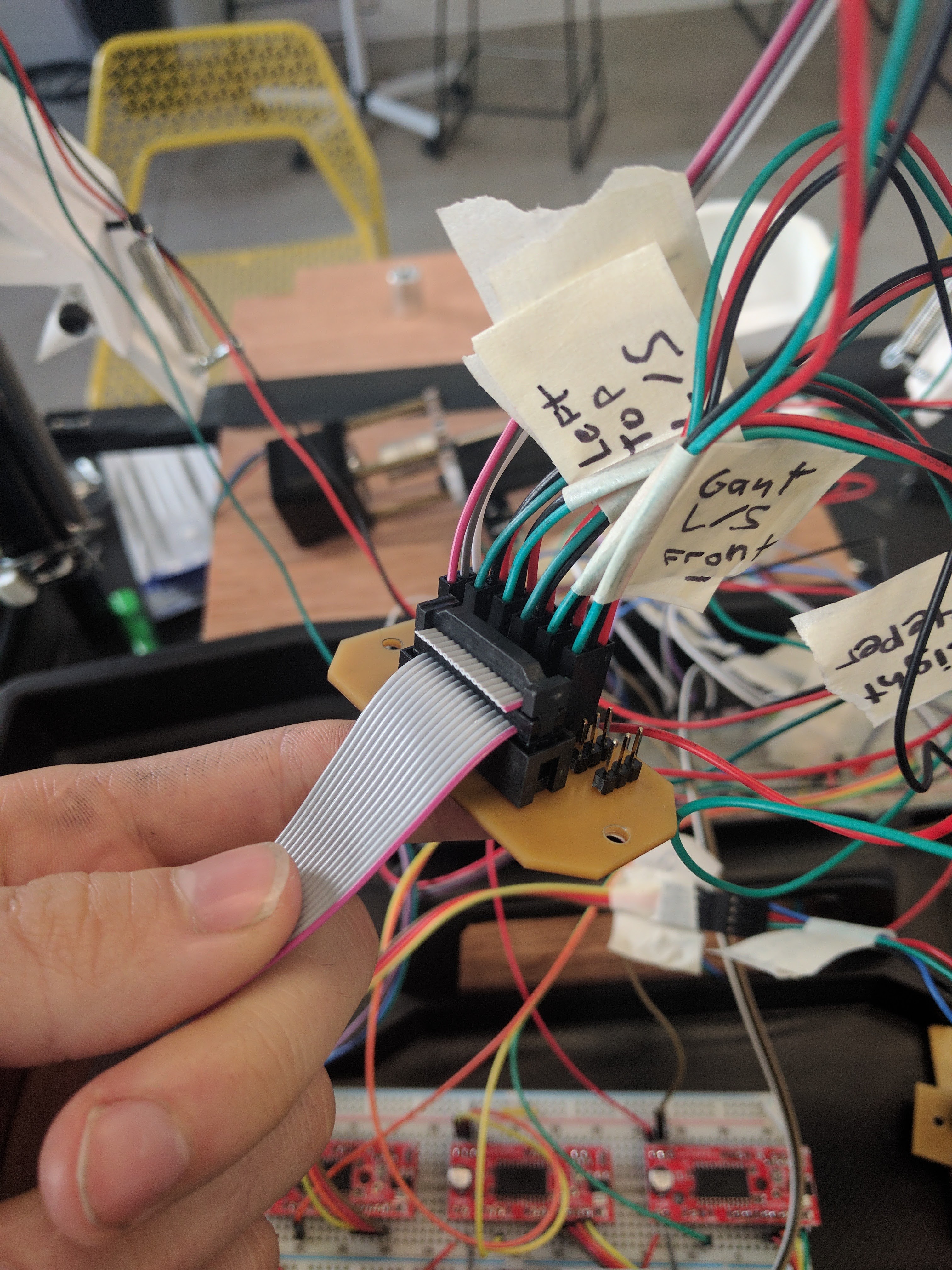
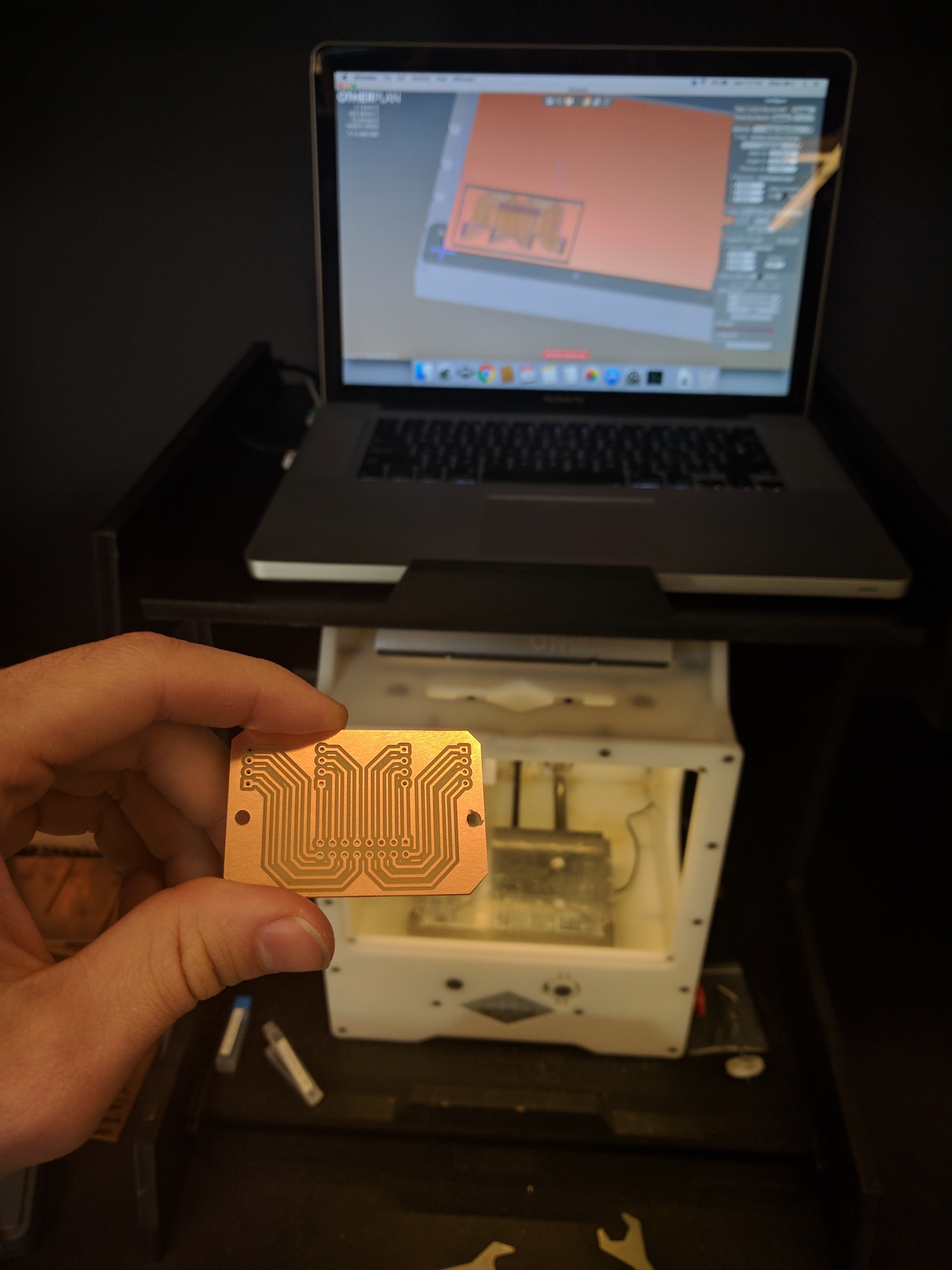
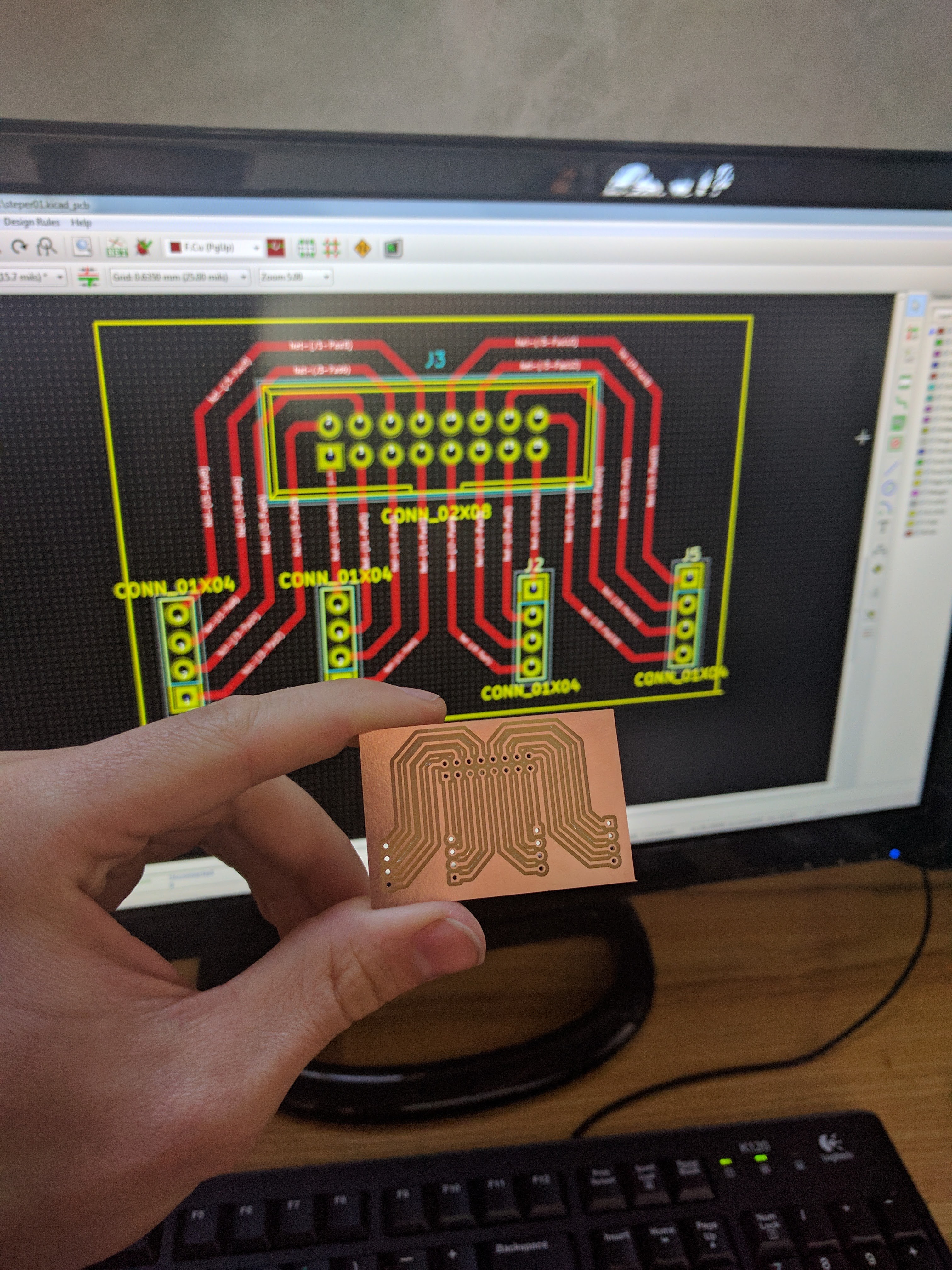
We are creating a system to automate the process of folding boxes
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests













 Tobias
Tobias
 Fabian
Fabian
 Gertlex
Gertlex
 Nathan Peterson
Nathan Peterson
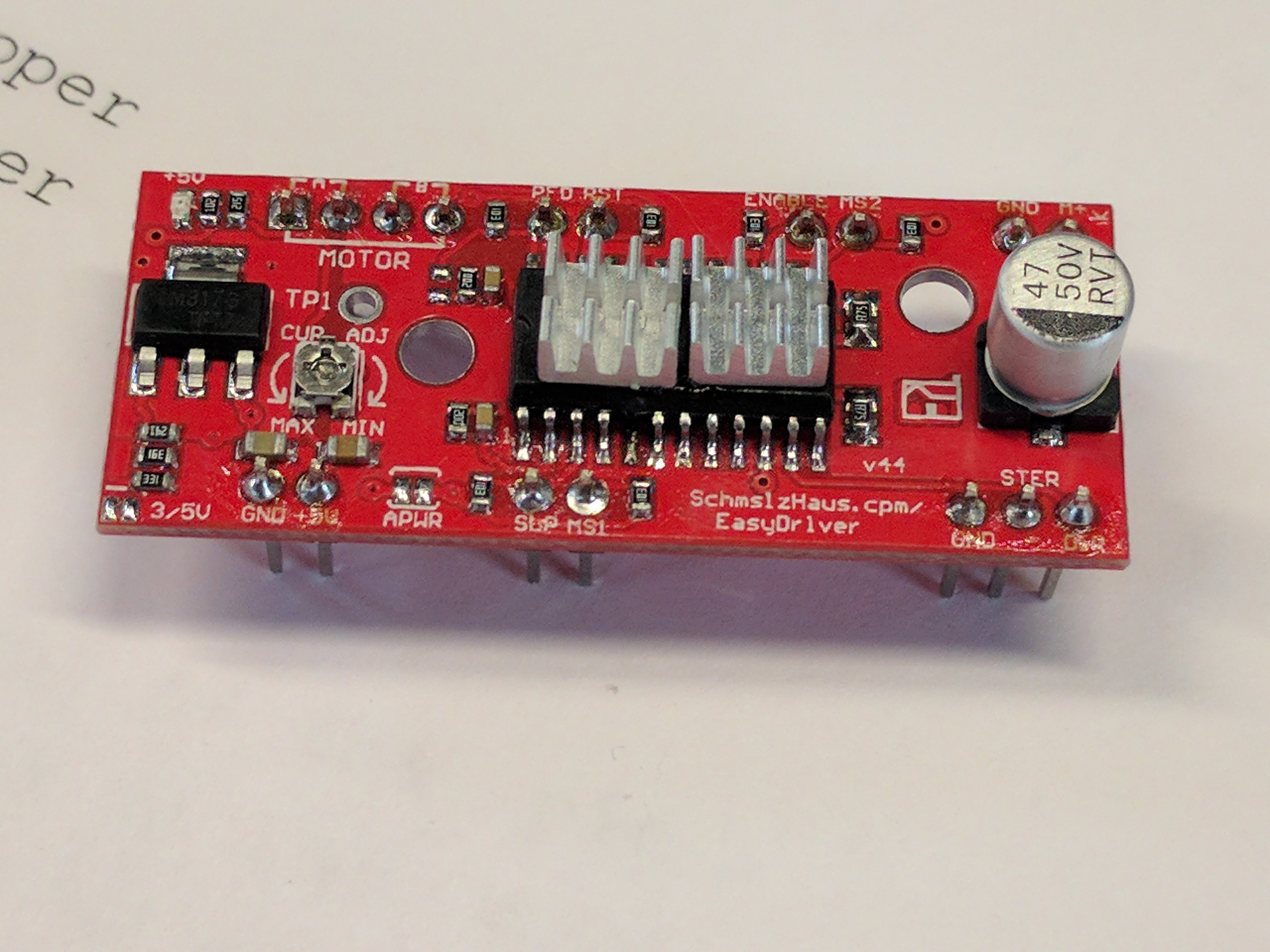
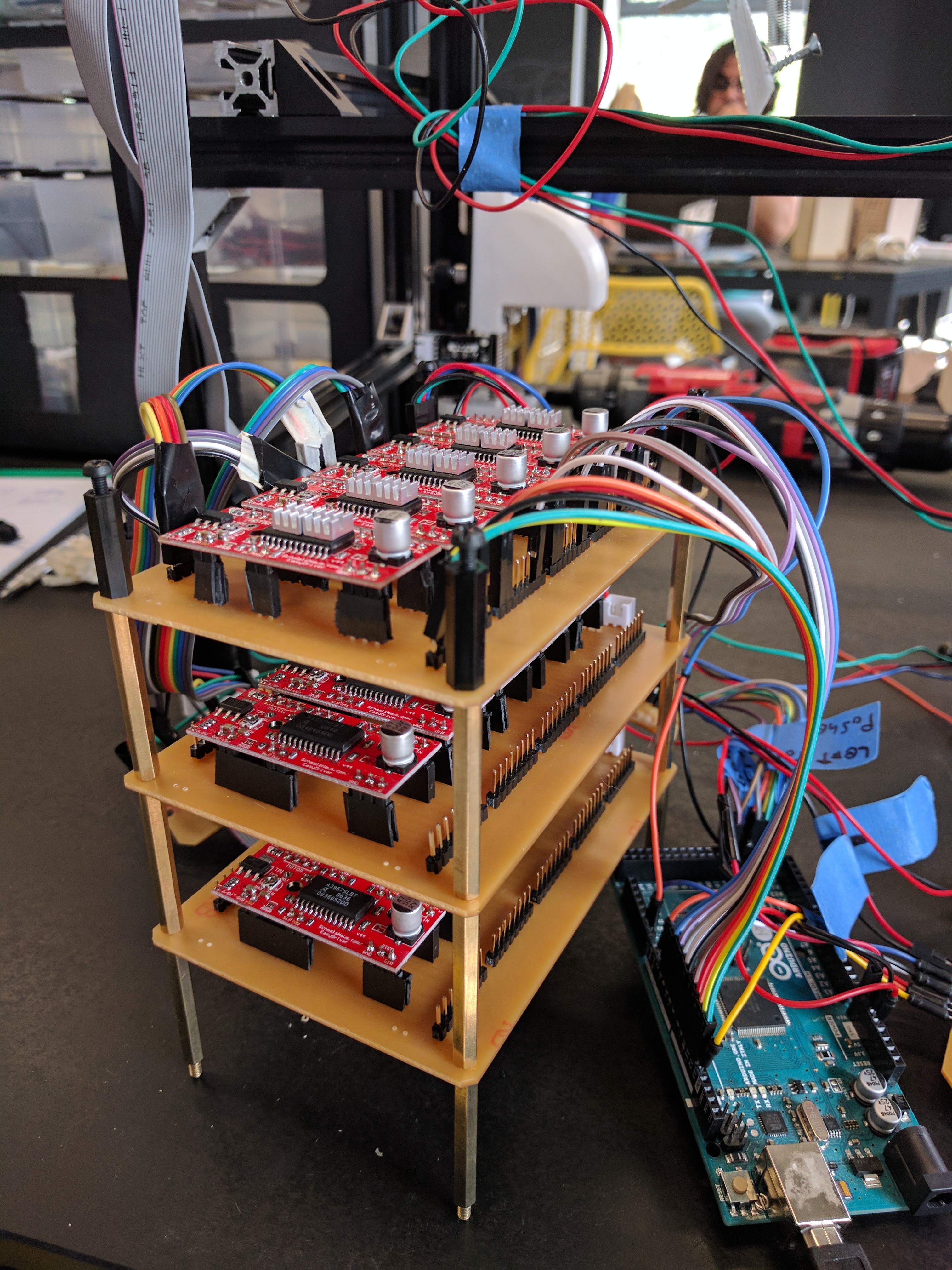
Do you have some problems about motion control ?Maybe AnanasStepper https://hackaday.io/project/20980-ananasstepper-20 is to meet your need!