-
1Start with the code
Make sure it works.
//Libraries #include <WiFi.h> #include <WiFiClientSecure.h> #include "soc/soc.h" #include "soc/rtc_cntl_reg.h" #include "Base64.h" #include "esp_camera.h" #include <VL53L1X.h> #define SDA 15 #define SCL 14 //CAMERA_MODEL_AI_THINKER GPIO. #define PWDN_GPIO_NUM 32 #define RESET_GPIO_NUM -1 #define XCLK_GPIO_NUM 0 #define SIOD_GPIO_NUM 26 #define SIOC_GPIO_NUM 27 #define Y9_GPIO_NUM 35 #define Y8_GPIO_NUM 34 #define Y7_GPIO_NUM 39 #define Y6_GPIO_NUM 36 #define Y5_GPIO_NUM 21 #define Y4_GPIO_NUM 19 #define Y3_GPIO_NUM 18 #define Y2_GPIO_NUM 5 #define VSYNC_GPIO_NUM 25 #define HREF_GPIO_NUM 23 #define PCLK_GPIO_NUM 22 //Enter your WiFi ssid and password. const char* ssid = "Enamor"; const char* password = "romaneromane"; //======================================== //Replace with your "Deployment ID" and Folder Name. String myDeploymentID = "AKfycbxMCVfz7Ige6_Sm1PgfUB-OH_5-lhg8pToatdPfY6NjS_NZIL5wd6v5BlH9_JKca7DzgA"; String myMainFolderName = "ESP32-CAM"; //======================================== WiFiClientSecure client; VL53L1X sensor; // This is to test the connection to "script.google.com". void Test_Con() { const char* host = "script.google.com"; while(1) { Serial.println("-----------"); Serial.println("Connection Test..."); Serial.println("Connect to " + String(host)); client.setInsecure(); if (client.connect(host, 443)) { Serial.println("Connection successful."); Serial.println("-----------"); client.stop(); break; } else { Serial.println("Connected to " + String(host) + " failed."); Serial.println("Wait a moment for reconnecting."); Serial.println("-----------"); client.stop(); } delay(1000); } } // For capturing and sending photos to Google Drive. void SendCapturedPhotos() { const char* host = "script.google.com"; Serial.println(); Serial.println("-----------"); Serial.println("Connect to " + String(host)); client.setInsecure(); if (client.connect(host, 443)) { Serial.println("Connection successful."); //.............................. Taking a photo. Serial.println(); Serial.println("Taking a photo..."); for (int i = 0; i <= 3; i++) { camera_fb_t * fb = NULL; fb = esp_camera_fb_get(); if(!fb) { Serial.println("Camera capture failed"); Serial.println("Restarting the ESP32 CAM."); delay(1000); ESP.restart(); return; } esp_camera_fb_return(fb); delay(200); } camera_fb_t * fb = NULL; fb = esp_camera_fb_get(); if(!fb) { Serial.println("Camera capture failed"); Serial.println("Restarting the ESP32 CAM."); delay(1000); ESP.restart(); return; } Serial.println("Taking a photo was successful."); //.............................. Sending image to Google Drive. Serial.println(); Serial.println("Sending image to Google Drive."); Serial.println("Size: " + String(fb->len) + "byte"); String url = "/macros/s/" + myDeploymentID + "/exec?folder=" + myMainFolderName; client.println("POST " + url + " HTTP/1.1"); client.println("Host: " + String(host)); client.println("Transfer-Encoding: chunked"); client.println(); int fbLen = fb->len; char *input = (char *)fb->buf; int chunkSize = 3 * 1000; //--> must be multiple of 3. int chunkBase64Size = base64_enc_len(chunkSize); char output[chunkBase64Size + 1]; Serial.println(); int chunk = 0; for (int i = 0; i < fbLen; i += chunkSize) { int l = base64_encode(output, input, min(fbLen - i, chunkSize)); client.print(l, HEX); client.print("\r\n"); client.print(output); client.print("\r\n"); delay(100); input += chunkSize; Serial.print("."); chunk++; if (chunk % 50 == 0) { Serial.println(); } } client.print("0\r\n"); client.print("\r\n"); esp_camera_fb_return(fb); //.............................. Waiting for response. Serial.println("Waiting for response."); long int StartTime = millis(); while (!client.available()) { Serial.print("."); delay(100); if ((StartTime + 10 * 1000) < millis()) { Serial.println(); Serial.println("No response."); break; } } Serial.println(); while (client.available()) { Serial.print(char(client.read())); } } else { Serial.println("Connected to " + String(host) + " failed."); Serial.println("-----------"); client.stop(); } void setup() { // Disable brownout detector. WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); Serial.begin(115200); Serial.println(); delay(1000); // Setting the ESP32 WiFi to station mode. Serial.println(); Serial.println("Setting the ESP32 WiFi to station mode."); WiFi.mode(WIFI_STA); //The process of connecting ESP32 CAM with WiFi Hotspot / WiFi Router. Serial.println(); Serial.print("Connecting to : "); Serial.println(ssid); WiFi.begin(ssid, password); // The process timeout of connecting ESP32 CAM with WiFi Router is 20 seconds. // If within 20 seconds the ESP32 CAM has not been successfully connected to WiFi, the ESP32 CAM will restart. int connecting_process_timed_out = 20; //--> 20 = 20 seconds. connecting_process_timed_out = connecting_process_timed_out * 2; while (WiFi.status() != WL_CONNECTED) { Serial.print("."); digitalWrite(FLASH_LED_PIN, HIGH); delay(250); digitalWrite(FLASH_LED_PIN, LOW); delay(250); if(connecting_process_timed_out > 0) connecting_process_timed_out--; if(connecting_process_timed_out == 0) { Serial.println(); Serial.print("Failed to connect to "); Serial.println(ssid); Serial.println("Restarting the ESP32 CAM."); delay(1000); ESP.restart(); } } Serial.println(); Serial.print("Successfully connected to "); Serial.println(ssid); //Serial.print("ESP32-CAM IP Address: "); //Serial.println(WiFi.localIP()); //---------------------------------------- Set the camera ESP32 CAM. Serial.println(); Serial.println("Set the camera ESP32 CAM..."); camera_config_t config; config.ledc_channel = LEDC_CHANNEL_0; config.ledc_timer = LEDC_TIMER_0; config.pin_d0 = Y2_GPIO_NUM; config.pin_d1 = Y3_GPIO_NUM; config.pin_d2 = Y4_GPIO_NUM; config.pin_d3 = Y5_GPIO_NUM; config.pin_d4 = Y6_GPIO_NUM; config.pin_d5 = Y7_GPIO_NUM; config.pin_d6 = Y8_GPIO_NUM; config.pin_d7 = Y9_GPIO_NUM; config.pin_xclk = XCLK_GPIO_NUM; config.pin_pclk = PCLK_GPIO_NUM; config.pin_vsync = VSYNC_GPIO_NUM; config.pin_href = HREF_GPIO_NUM; config.pin_sccb_sda = SIOD_GPIO_NUM; config.pin_sccb_scl = SIOC_GPIO_NUM; config.pin_pwdn = PWDN_GPIO_NUM; config.pin_reset = RESET_GPIO_NUM; config.xclk_freq_hz = 20000000; config.pixel_format = PIXFORMAT_JPEG; // init with high specs to pre-allocate larger buffers if(psramFound()){ config.frame_size = FRAMESIZE_UXGA; config.jpeg_quality = 10; //0-63 lower number means higher quality config.fb_count = 2; } else { config.frame_size = FRAMESIZE_SVGA; config.jpeg_quality = 8; //0-63 lower number means higher quality config.fb_count = 1; } // camera init esp_err_t err = esp_camera_init(&config); if (err != ESP_OK) { Serial.printf("Camera init failed with error 0x%x", err); Serial.println(); Serial.println("Restarting the ESP32 CAM."); delay(1000); ESP.restart(); } sensor_t * s = esp_camera_sensor_get(); // Selectable camera resolution details : // -UXGA = 1600 x 1200 pixels // -SXGA = 1280 x 1024 pixels // -XGA = 1024 x 768 pixels // -SVGA = 800 x 600 pixels // -VGA = 640 x 480 pixels // -CIF = 352 x 288 pixels // -QVGA = 320 x 240 pixels // -HQVGA = 240 x 160 pixels // -QQVGA = 160 x 120 pixels s->set_framesize(s, FRAMESIZE_SXGA); //--> UXGA|SXGA|XGA|SVGA|VGA|CIF|QVGA|HQVGA|QQVGA Serial.println("Setting the camera successfully."); Serial.println(); delay(1000); Test_Con(); Serial.println(); Serial.println("ESP32-CAM captures and sends photos to the server every 10 seconds."); Serial.println(); delay(2000); Wire.begin(SDA, SCL); sensor.setTimeout(500); if (!sensor.init()) { Serial.println("Failed to detect and initialize sensor!"); while (1); } sensor.setDistanceMode(VL53L1X::Short); sensor.setMeasurementTimingBudget(5000); sensor.startContinuous(50); } void loop() { Serial.println(sensor.read()); if(sensor.read() < 200) { SendCapturedPhotos(); delay(1000); } Serial.println(sensor.read()); } -
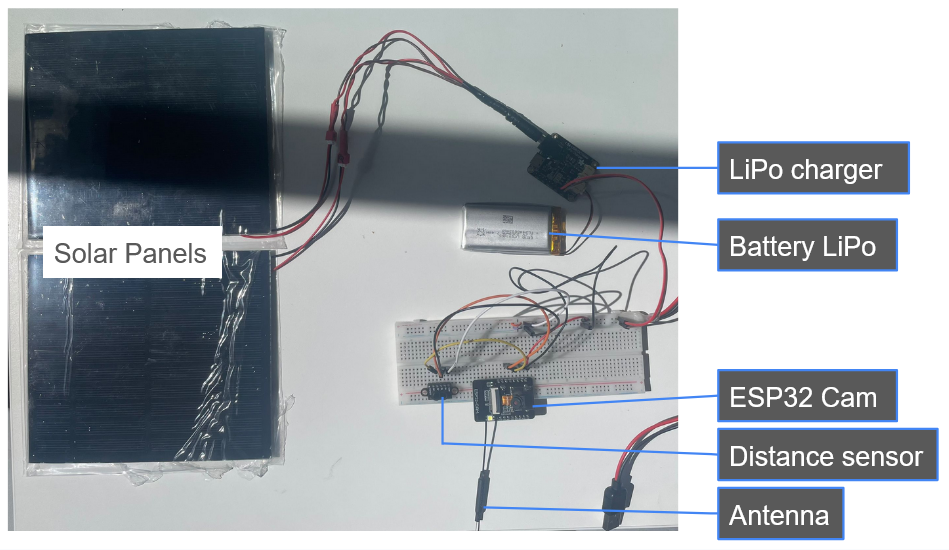
2Buy the components and make the circuit
You'll find the component's names above.
-
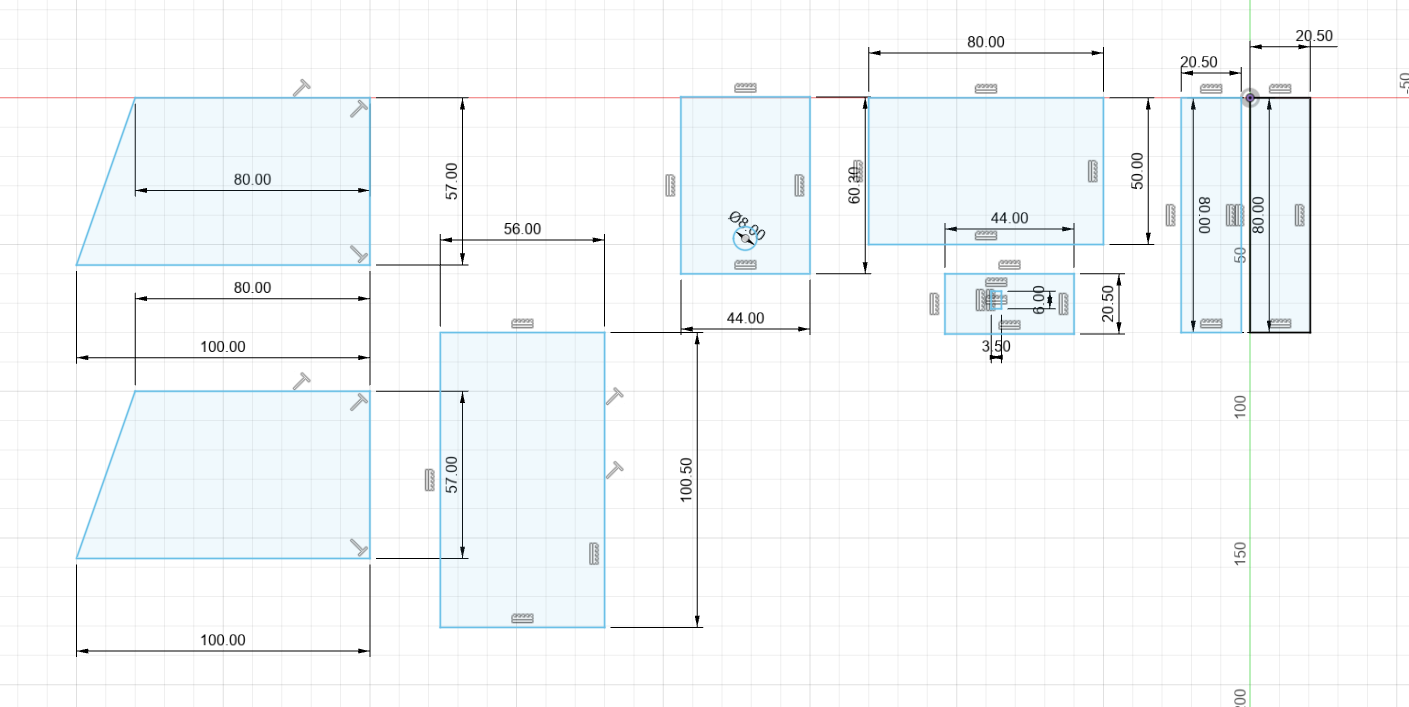
3When all the electronic is ready, make the first part of the house.
The module in the center of the house.
Wood laser plan OR 3D model plan (soon maybe yes maybe not :D) :
![]()
-
4Then finalize with the house
Plan will arrive soon :D (next week hopefully)
But you can imagine how it will looks like with our drawing and paper model in the logs part.
Bird Feeder Cam
Welcome to our innovative school project: the Bird Feeder Camera!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.