With the structure ready, we put together the electronic assemblies and codes to set our robot in motion for the first time.
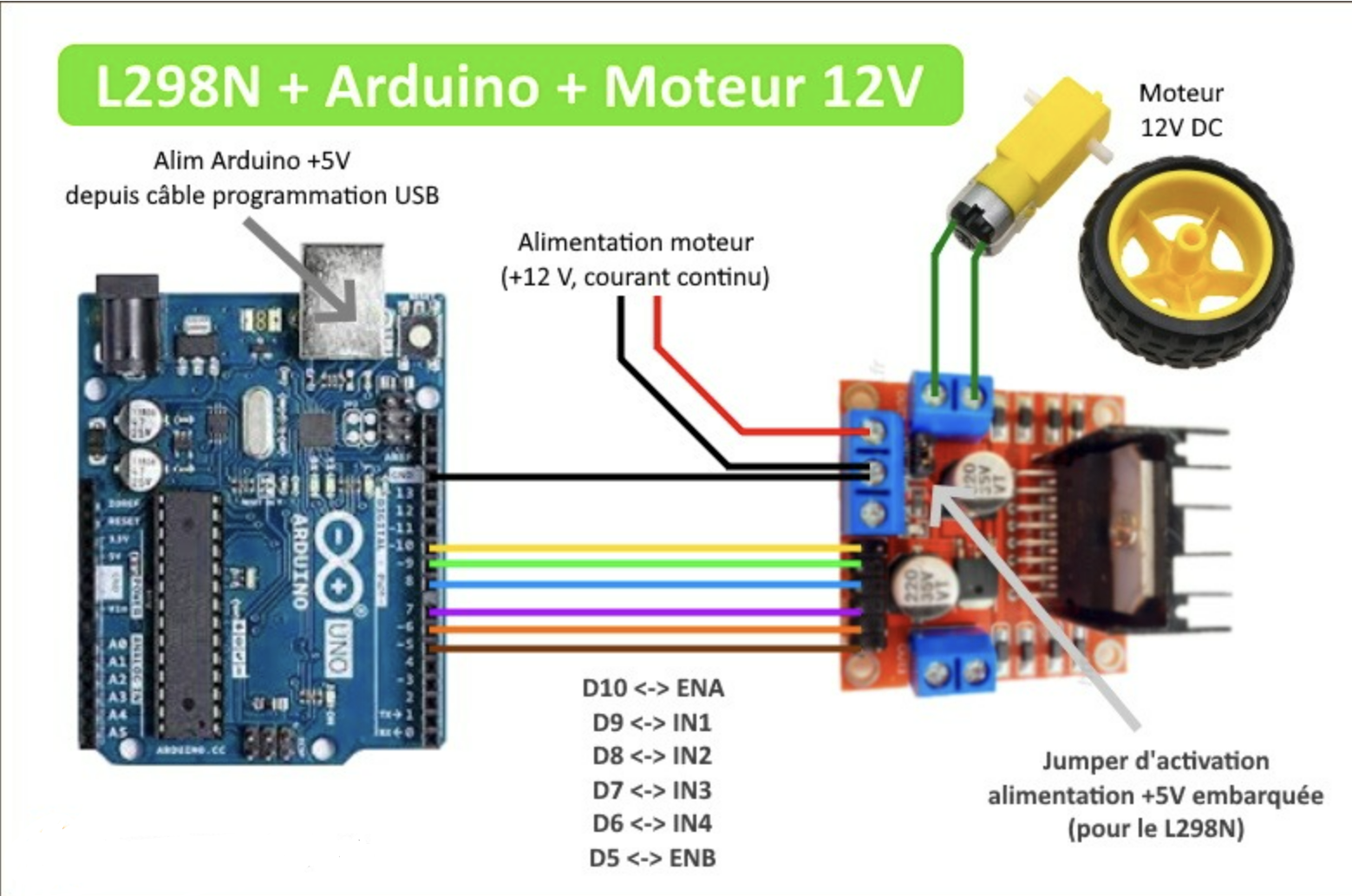
So we're using four DC3V 6V Dual Axis Gear motors, with the four respective plastic tyre wheels, and to control them we needed an H Bridge Motor Drive Tech, L298N Motor Driver.
To make the assembly, as well as the code, we looked at various datasheets and followed several tutorials such as:
https://www.st.com/en/motor-drivers/l298.html
Tutoriel L298N : fonctionnement, branchement, code arduino (passionelectronique.fr)
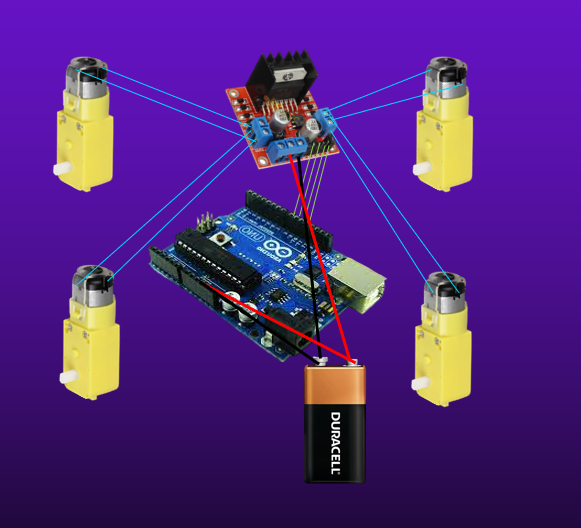
Finally, our robot managed to take its first steps with a simple “move forward” function coded for testing !
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.