deʃhipu
deʃhipu-
Walking
03/09/2017 at 14:59 • 0 commentsAfter a few tests with walking, I decided to not give it a huge head after all. I tried a number of different heads (including several acrylic globes from a crafts store, a doll's head and a lightbulb) and finally settled on a cardboard outline. This is something that an 11-years old can see and say "I could do that!"
For now I used the same code for walking as the #Micro:Bob (I just had to swap some pins and adjust trims), but I want to make it controlled from a second Micro:bit.
import microbit class Servo: def __init__(self, pin, trim=0): self.pin = pin self.trim = trim self.position = 90 self.set_period() def set_period(self): self.pin.set_analog_period(20) self.write(self.position) microbit.sleep(80) self.pin.set_analog_period(20) self.write(self.position) microbit.sleep(80) self.pin.write_analog(0) def write(self, degrees): self.pin.write_analog(int(25 + 100 * degrees / 180 + self.trim)) self.position = degrees def move(self, degrees, delay=5): if degrees > self.position: step = 1 else: step = -1 for position in range(self.position, degrees, step): self.write(position) microbit.sleep(delay) class Robot: NORMAL_FACE = microbit.Image( "42024\n" "90009\n" "00000\n" "61016\n" "27972\n" ) RIGHT_FACE = microbit.Image( "24024\n" "09009\n" "00000\n" "81001\n" "28952\n" ) LEFT_FACE = microbit.Image( "42042\n" "90090\n" "00000\n" "10018\n" "25983\n" ) def __init__(self): self.feet_servo = Servo(microbit.pin2, -2) self.left_servo = Servo(microbit.pin1, 4) self.right_servo = Servo(microbit.pin0, 4) microbit.display.show(self.NORMAL_FACE) def right_step(self): microbit.display.show(self.RIGHT_FACE) self.feet_servo.move(120) self.left_servo.move(60) self.right_servo.move(60) self.feet_servo.move(90) def left_step(self): microbit.display.show(self.LEFT_FACE) self.feet_servo.move(60) self.right_servo.move(120) self.left_servo.move(120) self.feet_servo.move(90) def right_half_step(self): microbit.display.show(self.NOLRMAL_FACE) self.feet_servo.move(120) self.left_servo.move(90) self.right_servo.move(90) self.feet_servo.move(90) def left_half_step(self): microbit.display.show(self.NORMAL_FACE) self.feet_servo.move(60) self.right_servo.move(90) self.left_servo.move(90) self.feet_servo.move(90) def walk(self, steps=1): step = 0 for step in range(steps - 1): if step % 2: self.left_step() else: self.right_step() if step % 2: self.right_half_step() else: self.left_half_step() robot = Robot() robot.walk(8) -
The Base
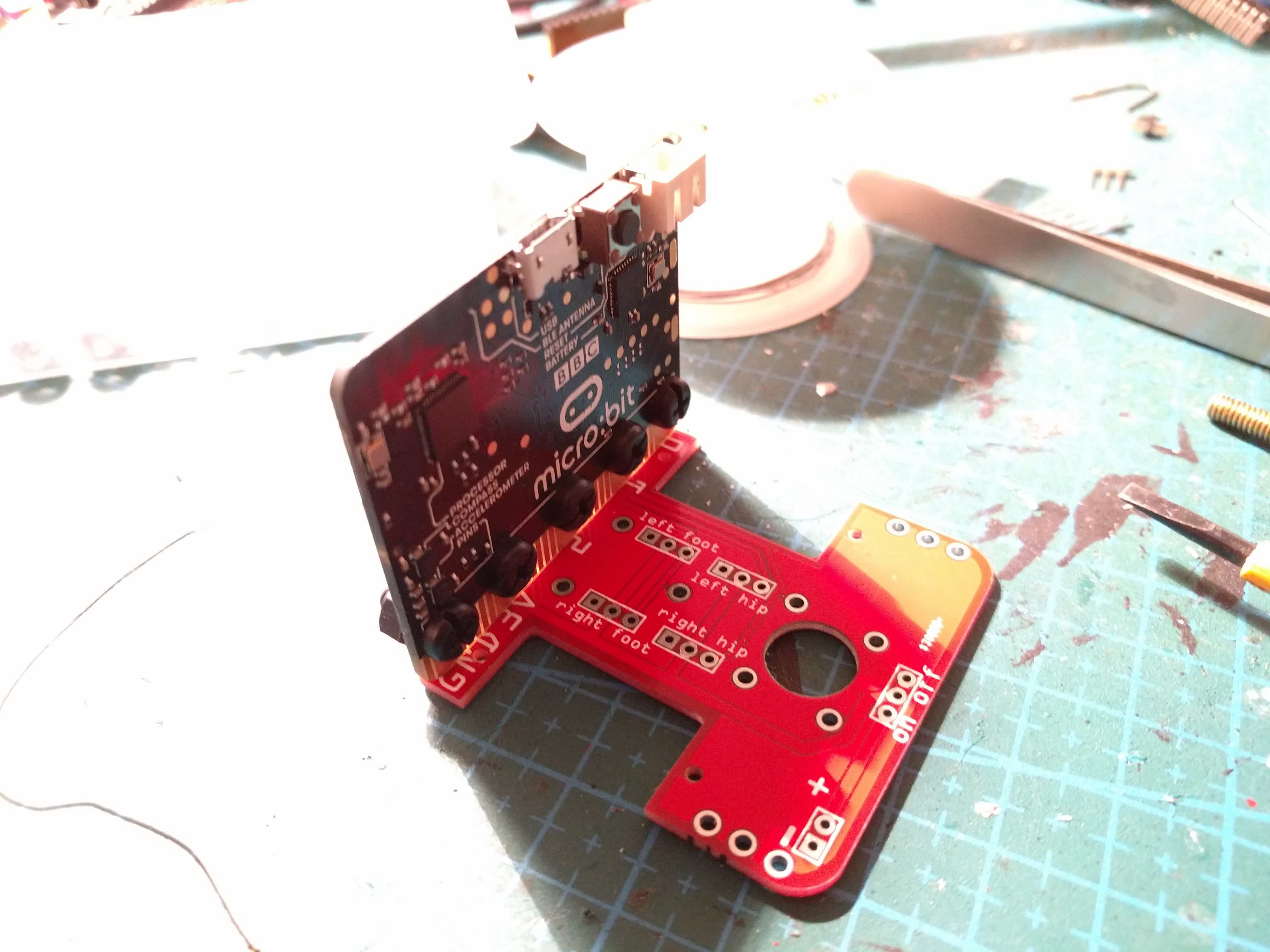
03/07/2017 at 16:40 • 0 commentsSo this is a successor of the #Micro:Bob robot, that would be a little less "gangsta". I designed a PCB for attaching everything together -- the micro:bit, the servos and the battery -- so that you don't have an ungodly mess of wires held together with two-sided tape. I also left some extra holes in the PCB to which you can solder paperclips, to build on top of it and make it a little more interesting.
![]()
I found a nice method of mounting the micro:bit to the PCB without using the bulky edge connection -- just use loops of wire made out of paperclips, and plastic bolts (to not damage the micro:bit). The servos fit right into the slots -- I just made the screw holes a bit too tight, had to enlarge them a bit later. The battery holder is still attached to the backs of the servos with a two-sided tape -- there is no room on the board for a different way of attaching it, unfortunately.
In hindsight, I should have made more sockets for the servos -- letting you to plug several servos to the same pin, so they move together, so that you can make hands that move together with the legs, etc. -- maybe in the next version.