Guy Winterbotham
Guy Winterbotham-
Final Tweaks
08/17/2014 at 02:25 • 0 commentsWhen I put all together, a problem with motor noise re-emerged. I tired another filter cap on the LCD controller but it did't help.
![]()
Next I neede to try and get the lips to move more. Here are few shots inside the Monkey's head. Not great so you have to use your imagination. First a view into the head showing the screw attaching the servo mount to a flat plastic divider.
![]()
Next, below is a shot of the perf board connecting the eye LEDs with some limiting resistors to the I/O exteder
![]()
Finally a bad shot looking up under the plastic divider in an attempt to show the the servo. The white wire bundle is the shrink wrap covering the Eye LED wires. Below them the servo wires.
![]()
I got the lips to move a little better but not as much as I wanted. That would have required disassembing the entire servo mount and redrilling. Think I'm done.
-
Moving the Power Pieces
08/11/2014 at 01:17 • 0 commentsDecided it would make more sense to move the power pieces and mount to the side of the motor mount. Good old hot glue will do. I know I'm going to want to up the LiPo from the 850mA to something more like 2200mA to give it a chance to last a while. Since charging was also going to be a deal I decided to add a permanent USB cable so the charger would not be getting yanked about all the time. In a moment of serendipity, the original power switch I added back in ended up being close to the original mounting so mount it back I did.
This shot also shows the speaker squeezed into the battery compartment. I drilled some holes in the back shell to let the feabile sound from the unamplified 3.3V PWM output of the sound module.
![]()
-
All lit up and nowhere to go
08/11/2014 at 00:20 • 0 commentsThe picture shows the effect of the refraction and disbursement. Not very bright but mot bad for an IoT device with this much going on. I have the eyes turned on. Here I have set the color to blue and green for an aqua color. As you can see its a bit of a crap shoot as to where the light goes. Here the lower front does not get much penetration.
![]()
-
Playing with light
08/10/2014 at 23:58 • 0 commentsI wanted the monkey to be separate from the base so that the effect of the light shining out of his bum was a little magical. Look mum, no connections. To do that I need to be able to difuse the light. In Build Monitors consisting of orbs, that usually means some form of frosting. I considered frosting the glass skull. I came a across some pre-frosted pebbles at a craft store. They did a good job, but shining a light through them at the store showed the light would not penetrack far.
![]()
I settled on clear glass balls that could allow for refraction of the light. I also found a large acrillic diamond at the store that I saw could also refract the light outward from a focal point. I'm sitting the diamond flat side down on a flashlight so you can see the distribution and limited reflection back onto the table.
![]()
I jammed the diamond into a skull full of balls. The monkey with Blink M facing downwards sits on the diamond and the RGB light gets distributed. Here the flash gives you a sense of the distribution.
![]()
-
Perf Board - Butt Ugly Mounting
08/10/2014 at 23:42 • 0 commentsSo I'm only ever making one of these. I never repeat (unless someone wants to throw me money) and so perf board will do. No I'm not showing all my crappy wiring. Basically the imp goes on one side and the VM module on the other.
![]()
After I had everything mounted and connected I trimmed the perf board. I always deferr decision like when to cut and trim to the last responsible moment to give me options. In the picture above you can see the Imp module, the Blink M and the back of the LiPo charge. Below I jameed evenything up into the compartment and got it all to fit.
![]()
I then decided to move the power outside so that there was enough room to push the Blink M back in. It was clear by now the LiPo was not going to last as I wanted so I need to add a USB cable as it would remained plugged in more than I wanted. In this shot you can see the VM module on the other side of the Imp module.
-
Loading up the Blink M
08/10/2014 at 23:35 • 0 commentsI mounted the LCD to the outside of the battery compartment. I routed the I2C wires so they could eventually be attached to the Blink M and then the perf board holding the Voice and Imp modules.
![]()
-
Always keep your crap
08/10/2014 at 23:31 • 0 commentsI have always kept old bits of electronics to use some day in the future. This time around they came in handy. I found an old cellphone with a 4G SD card I could use and an old remote that I chopped up to make a servo mount.
![]()
![]()
-
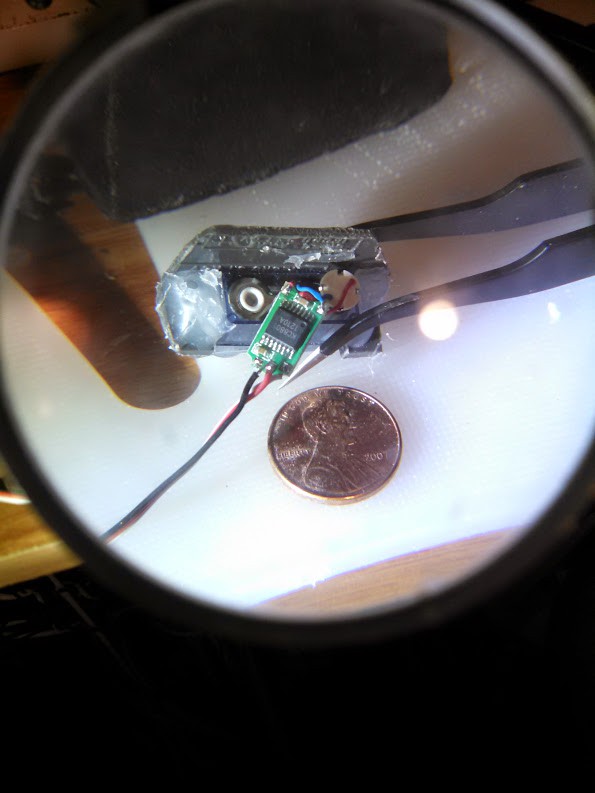
Be kind to your servo
08/10/2014 at 23:28 • 0 commentsI found a servom that operated at 3.3V but is was so small it was impossible to attach an extension to the tiny arms in order to engage the rod that pushed against the mouth to make it move. I upped the size of the sero but the rough handling to get it to fit caused it to fall apart. I need to get my eyes checked but at least my hands are still steady enough for this work.
![]()
-
Hacking the head
08/10/2014 at 23:25 • 0 commentsThis part was a PITA. Basic idea was in some way to attach a servo to some part of the mechanism that drove the movement of the lips. Unhacked, when you hit the monkeys head, it pushs down a rod that switches the direction of the motor and engages gears that:
- Move the mouth
- Make the eyes move in and out
- Make a nasty screeching sounds by grating some spriny steel against a metal gear.
I tried several different linkages but in the end just kept cutting linkages until I finally found enaging a rod was the easiest way.
This pic is not that great but shows the head disengaged.
By going for the rod I had to remove the linkage that moved the eyes. I made up for that by replacing them with LEDs that I could then control with the LCD panel.
That's how I roll. make it up as I go. More fun, more challenge. No frustration of a plan not working as there never was one.
![]()
-
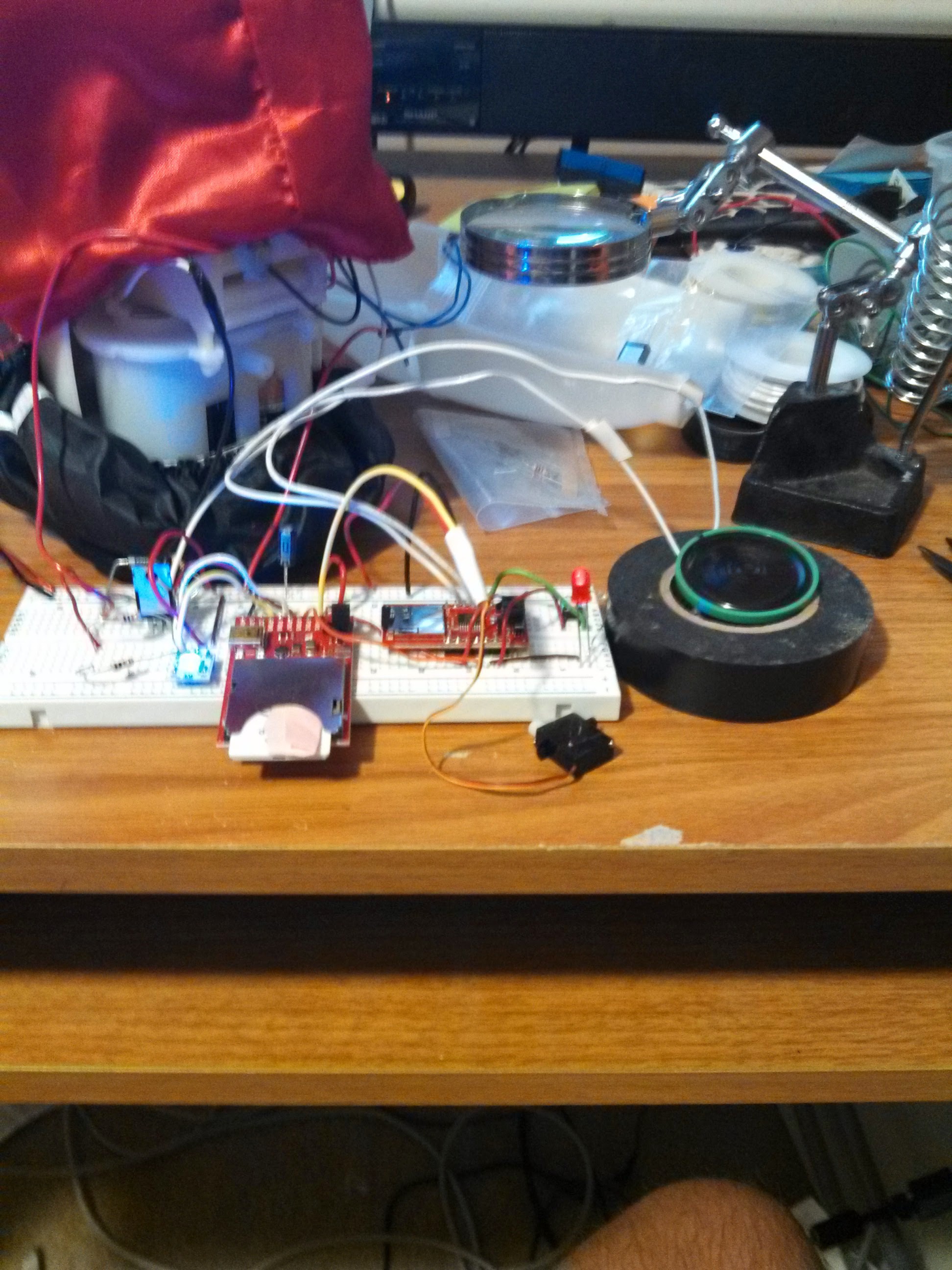
Bread Boarding the VM Module
08/10/2014 at 22:06 • 0 commentsPretty straight forward. After figuring out the majority of lines were internally held high I just needed. Power and signal (clock and data). It would have been nice if the module would have been I2C. It suck two precious I/O for signal and data plus I feed the Busy signal back into the IMP so I could use it to trigger the servo. You can see the Blink M which hung off the I2C bus nicely. It had the added benefit of preprogrammed modes which woul map pretty well to what the Jenkins build server did with using colored states for build status.
The speaker was an early choice but was too quiet so I went with a larger device.
![]()
Portable Chaos Monkey
Information Radiator, Software Build Monitor