 decurus
decurus-
Release
04/04/2025 at 21:49 • 0 commentsThe entire art project has been released. Go check it out over at https://www.tdctunes.com/awakening
It’s finished

-
Internals
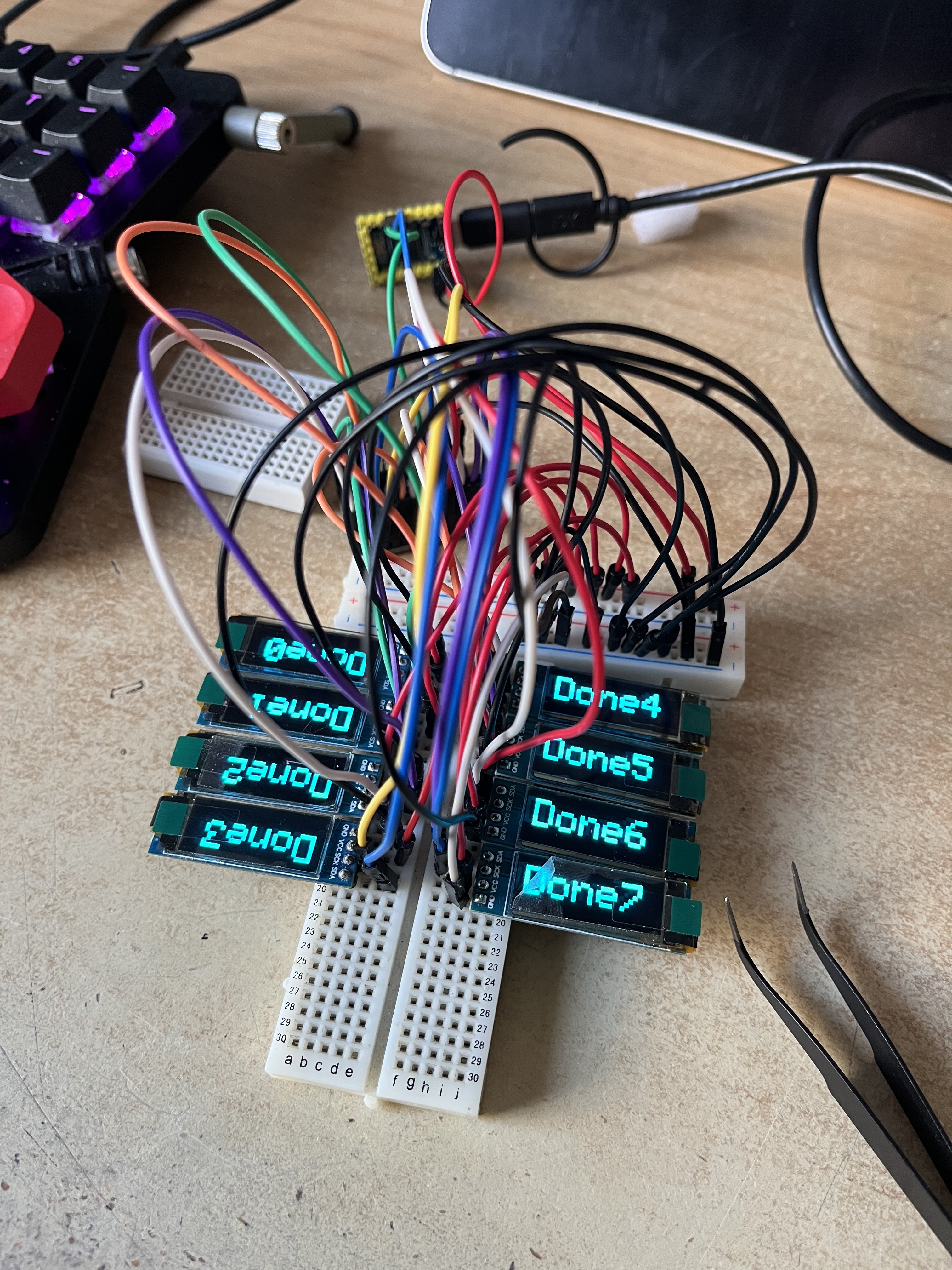
02/12/2025 at 23:00 • 0 commentsAll that was left to do was build some additional internal electronics. First I coded some displays to show some random states. I coded way to many but… better be prepared. Since this was a rather rushed project all the planing I did was for way to much. Better have it and not use it then need it and not have it.
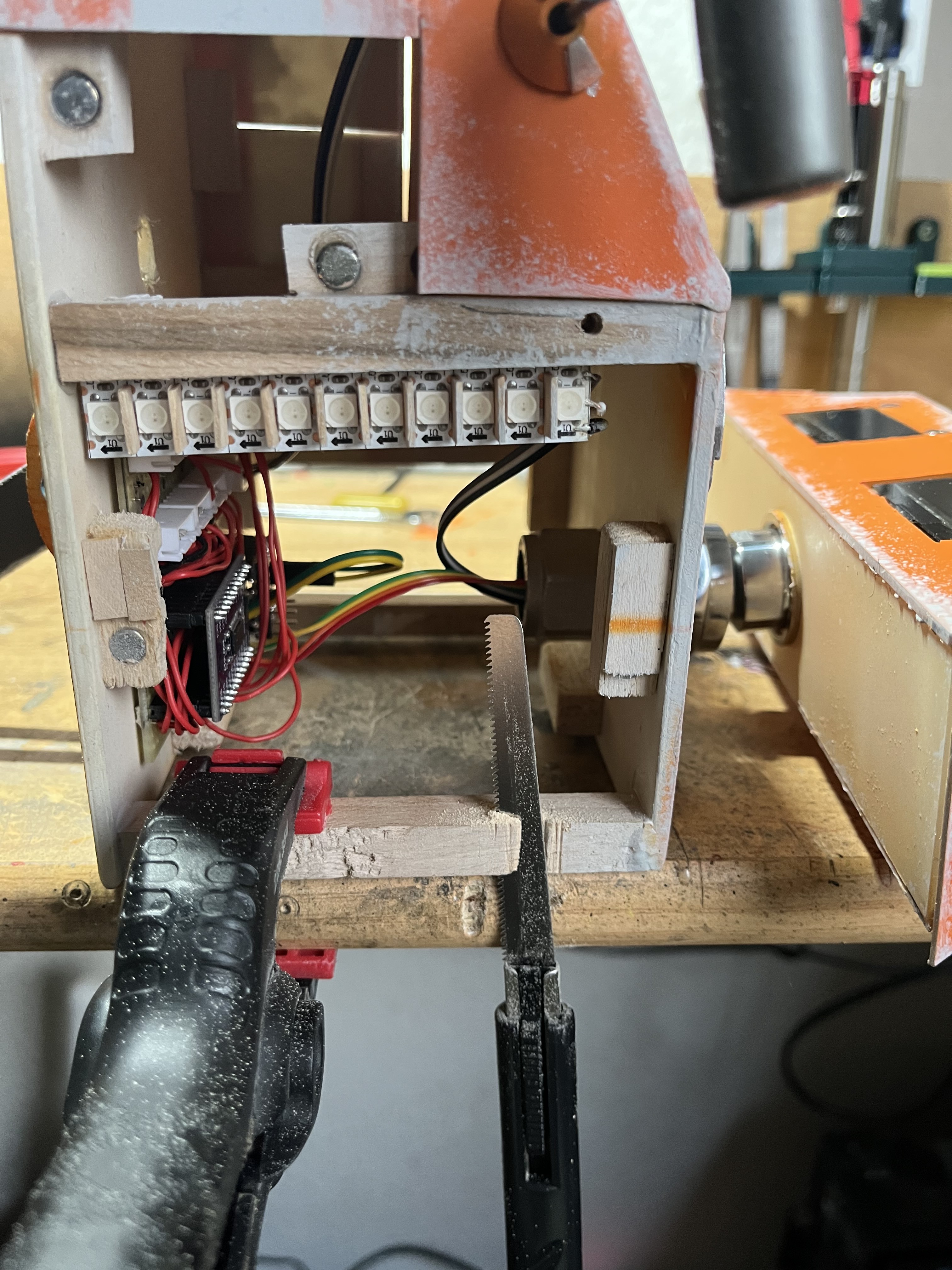
I also added some leds to show the (fake) state. One downside of planing so little was that after adding the additional displays, the hull didn’t fit on the structure anymore, so I had to cut of some wood. Made it work in the end
Some more fine tuning and coding and that was pretty much it. I will add some more fotos once the art project is officially puplished.

-
Building the body
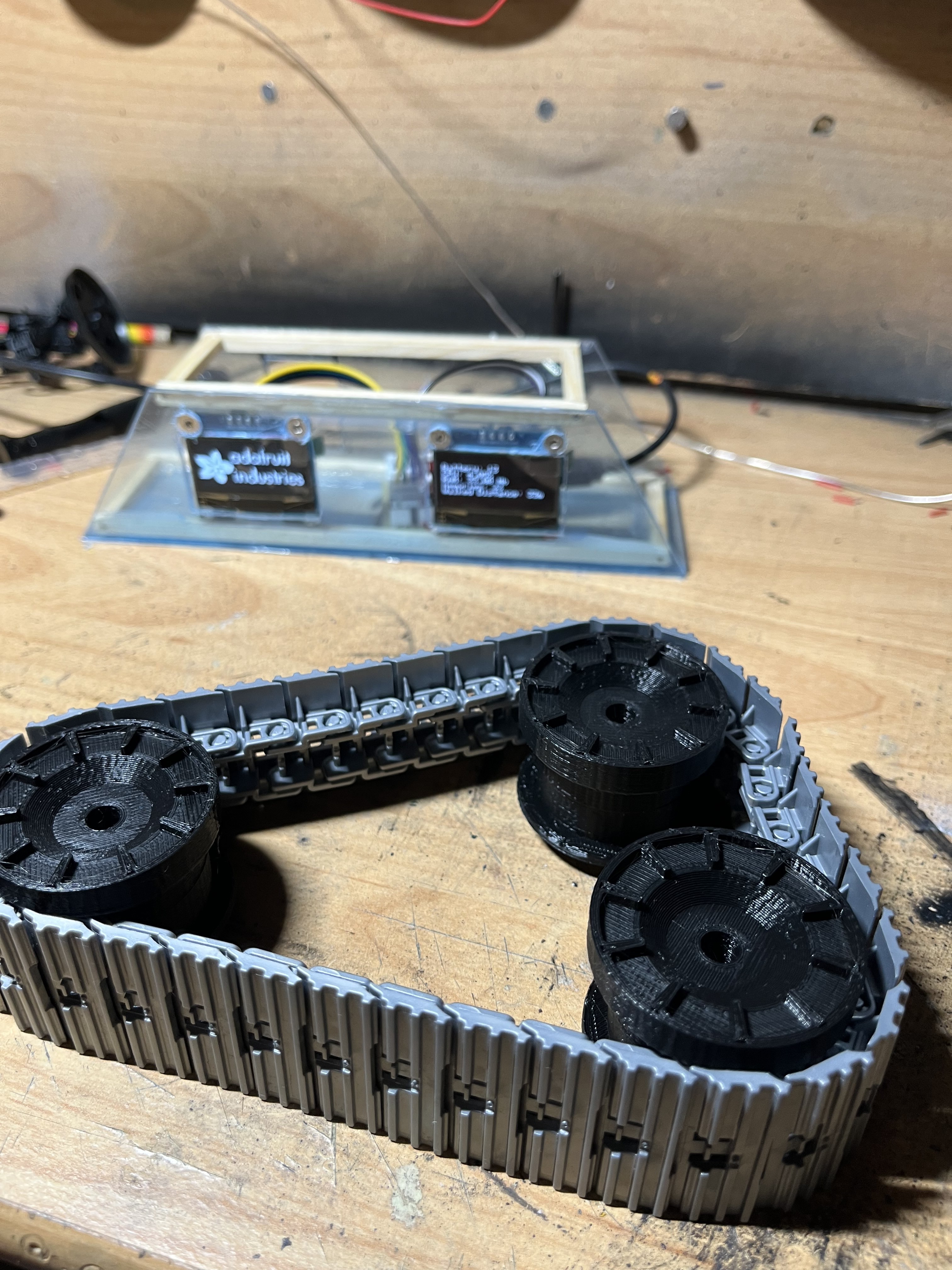
02/12/2025 at 22:46 • 0 commentsInterestingly, building the body went pretty smoothly. Probably because on most of my decisions I settled with the first thing that came to mind which usually also was the easiest thing. That being said, with the feet I already bent some of my usual rules. I decided to have the feet be on tracks, which I bought for this specific purpose. And to make mounting easier I 3D printed the wheels to guide the tracks ) which I also usually try not to do. The rest was very straight forward, cut some wood, build some structure, screw everything together.
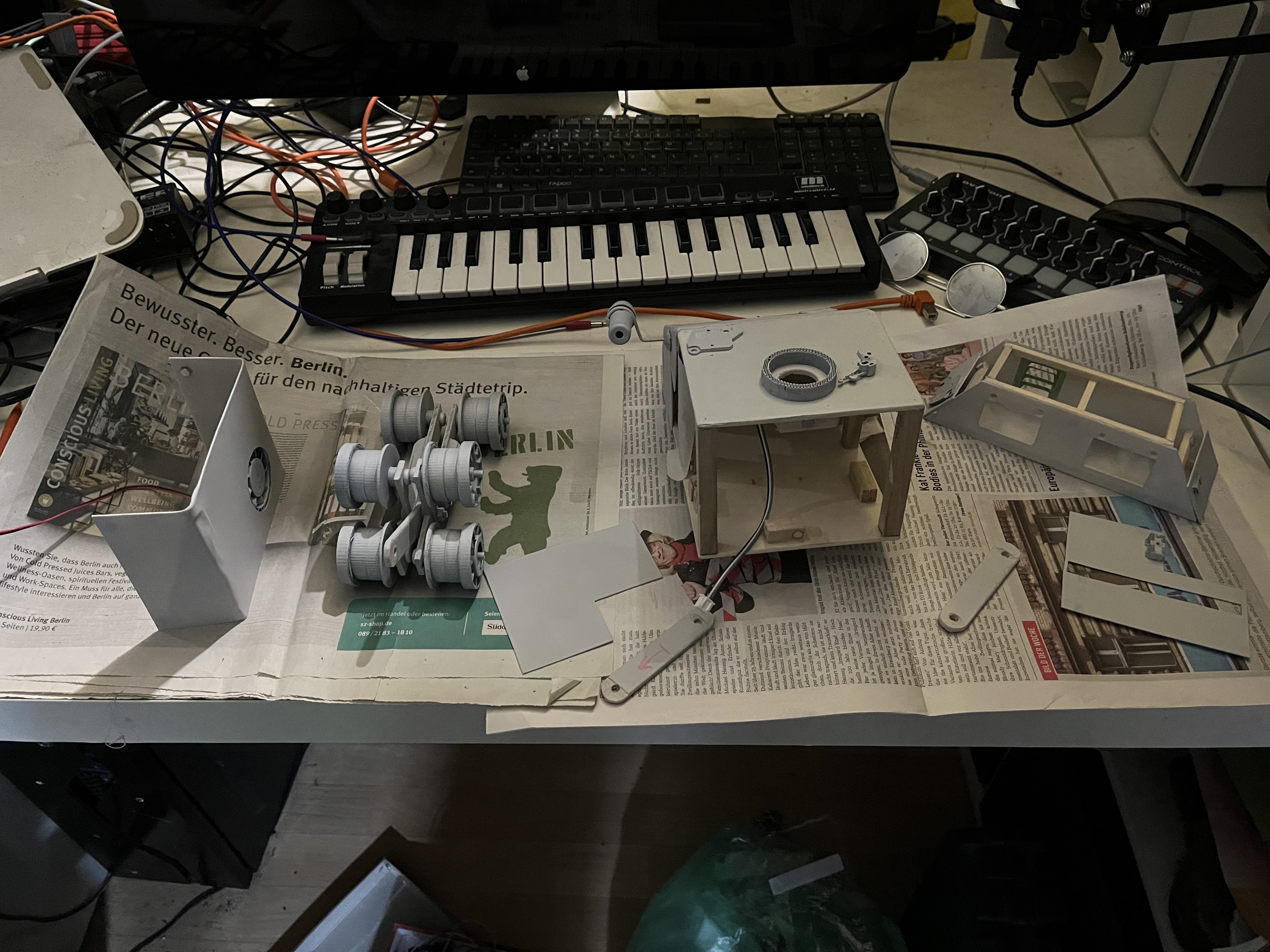
For the body I just hoped for the best and started building the main structure from wood. I figured this would be the most stable way and afterwards everything can be made a bit more pretty

All that was left to do was to build the hull using thermoplastic. Half of it I fixed with glue, the other half I fixed with magnets so I could open the body easily
-
Starting head first
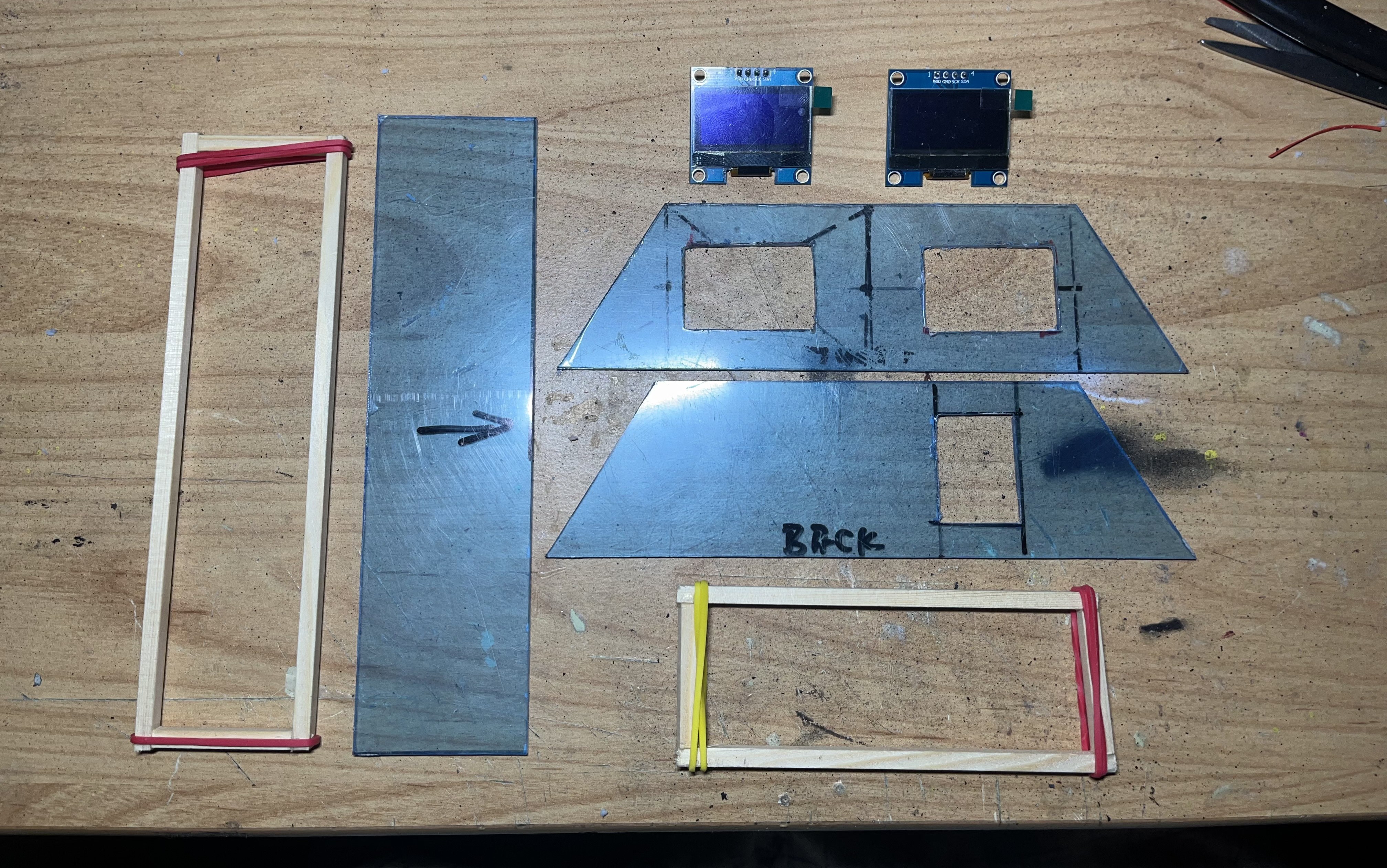
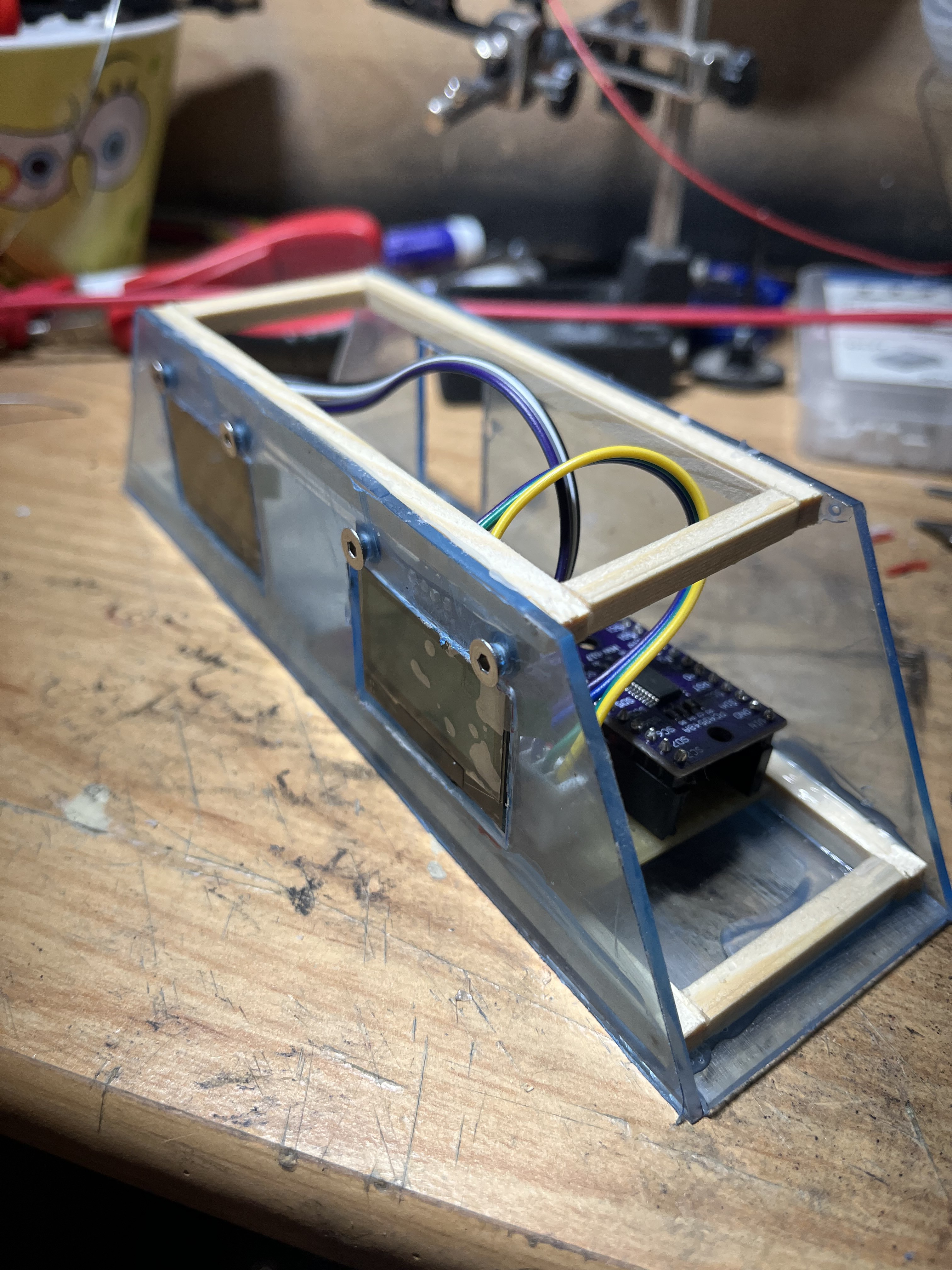
01/05/2025 at 17:08 • 0 commentsThe head of the robot is ready for assembly. Everything is gonna be glued, because I don’t want screws (they would not look right in the size of the model) so I really hope everything will hold together….
Putting the brain together was easy enough. I am just amazed every single time by how much wood glue can handle.
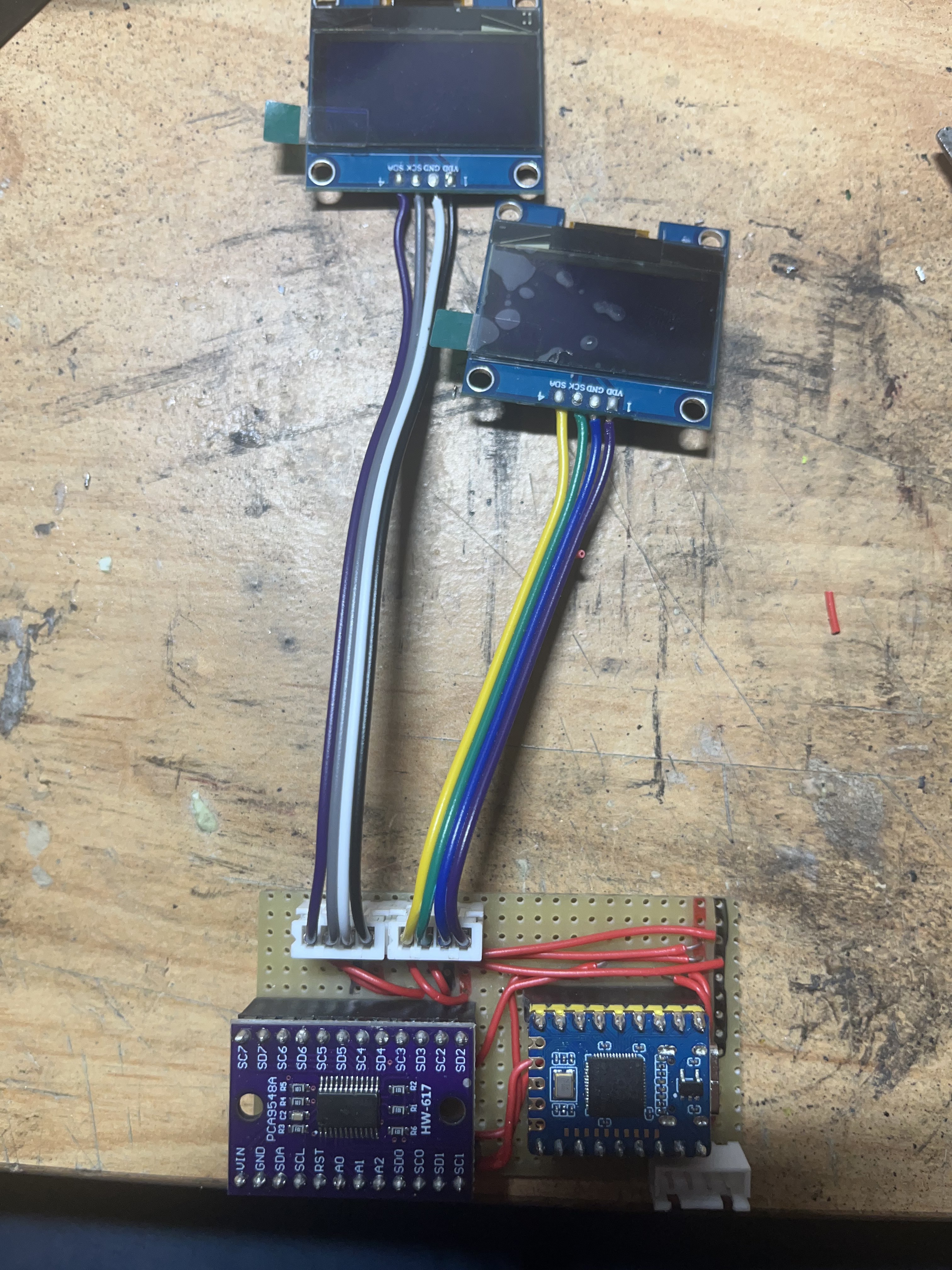
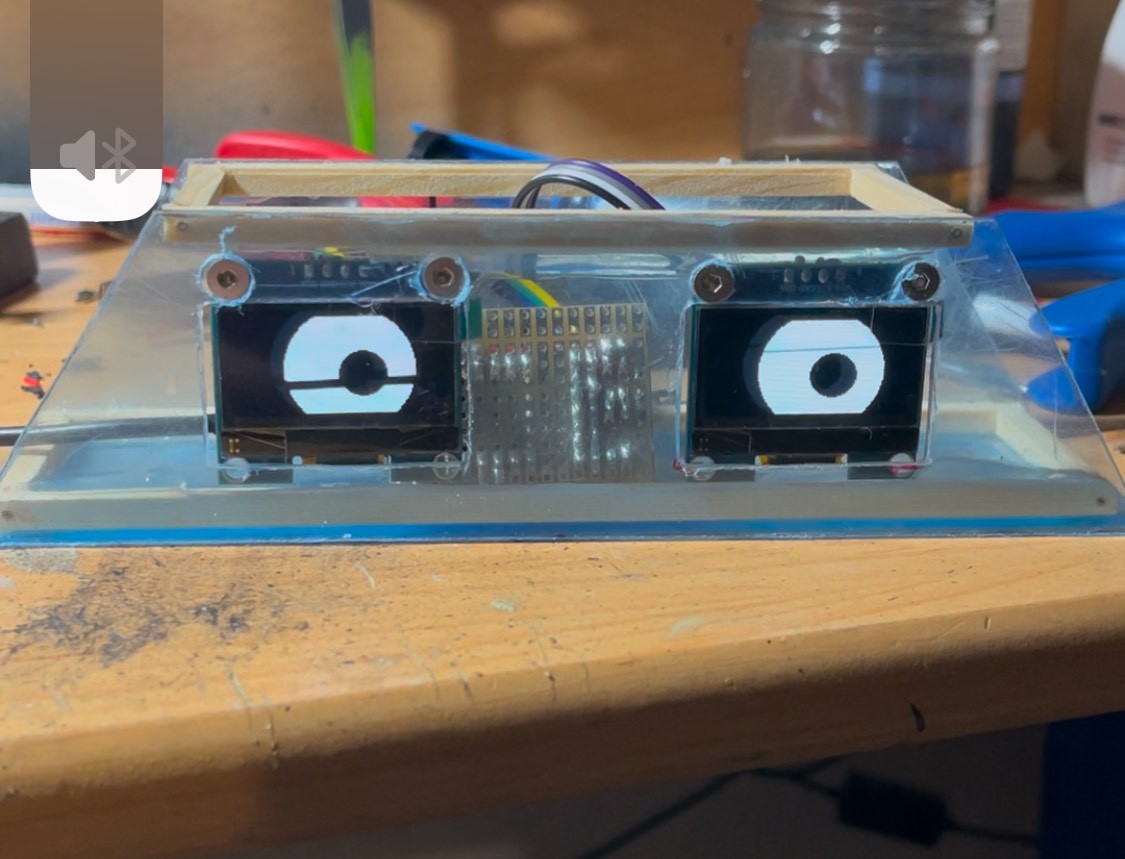
When it came to the brain I had some trouble. I didn’t really run a lot of tests with the screens for the eyes, because I already coded all the other displays and thought for the eyes it would be pretty much the same. Turns out, the screens for the eyes have an SH1106 chip (instead of an SSD1306 like the others do) and the library for that is not as well written. I had a lot of trouble getting everything running and for some reason the PCA9548A also didn’t do what it was supposed to do. After a lot of panicking and buying other screens, I started over completely anew and decided there had to be SOME way to make use of the two I2C ports of the rp2040zero. After some small changes to the SH1106 library I actually managed to connect both screens to their own channels. Ready for the next stage.
He currently still looks a bit derpy, but that will be fixed in a later coding session. But he can look around and blink. So, for now, the rough head structure is done
Becoming Myself
A contribution to "Awakening" by TDCTunes










