 Tamandutech
TamandutechThe Source Code: github.com/Tamandutech/LineFollower_SemrehV2_Code
Schematic and PCB project: oshwlab.com/tt_linefollower/tt_linefollower_semreh
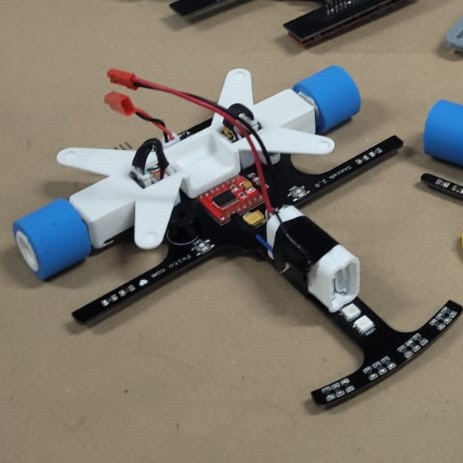
The robot in action, winning the Brazilian tournament "Copa Pinhão":
Semreh is a high-performance line-follower robot developed by Tamandutech, the robotics team of UFABC, built for precision and speed.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
The Source Code: github.com/Tamandutech/LineFollower_SemrehV2_Code
Schematic and PCB project: oshwlab.com/tt_linefollower/tt_linefollower_semreh
The robot in action, winning the Brazilian tournament "Copa Pinhão":
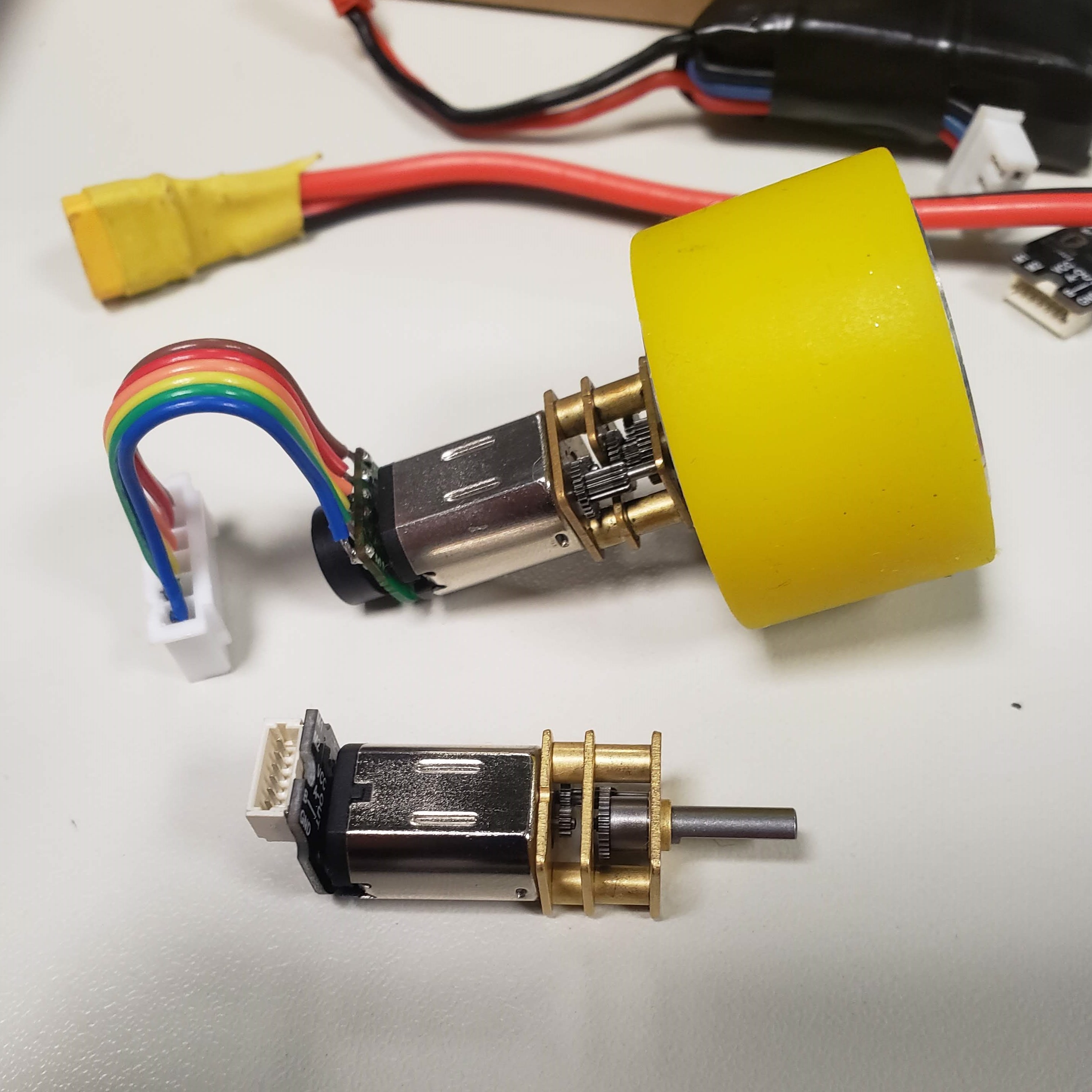
In the early versions of Semreh, we relied on original N20 Pololu 6v 3000rpm motors paired with voltage regulators. The N20 motors proved to be highly versatile and beginner-friendly, as they come with pre-attached gearboxes and a D-shaped shaft, making it easy to mount wheel hubs. Additionally, Pololu manufactures Hall effect encoders specifically designed to be soldered onto these motors, further enhancing their usability:
The voltage regulators stepped down the 7.4V of 2S batteries to approximately 6V, keeping the motors within their rated specifications. However, through discussions with other teams, we discovered that N20 motors could handle overvoltage without significant degradation. This led us to experiment with removing dedicated voltage regulators, resulting in noticeable performance gains. Encouraged by these results, we further pushed the limits by switching to 3S 11.1V batteries without regulators. Surprisingly, the N20 motors handled the increased voltage remarkably well, delivering impressive acceleration that significantly improved our robot’s speed.
However, the real breakthrough in our motor research came with the adoption of a 1020 coreless motors (7.4v) commonly used in low-cost drones. These motors provided extraordinary torque and an impressive RPM, but at a significant costs: their extremely high current consumption and the necessity of its own gearbox:
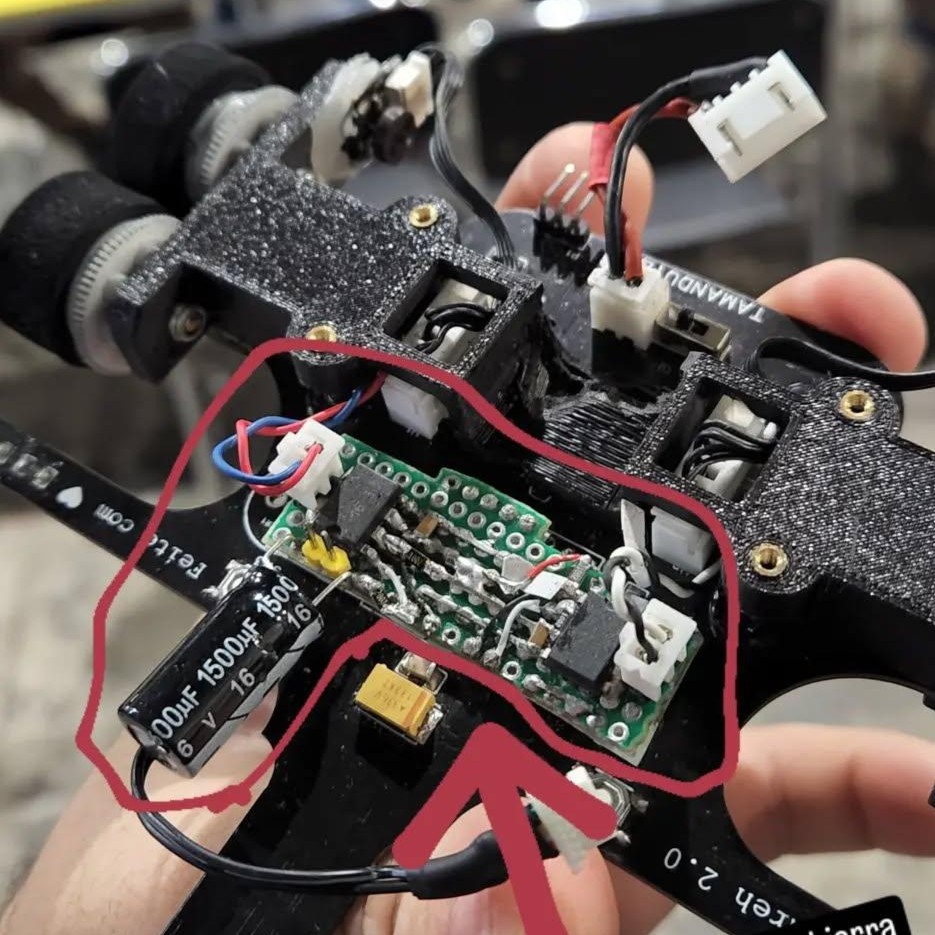
This excessive draw would trigger the built-in protection of the TB6612 H-Bridge we were using in Semreh, causing the robot to shut down when performing tight turns or zigzags. These turns placed a heavy demand on the motors, which pulled too much current, activating the protection system and momentarily disabling the motors.
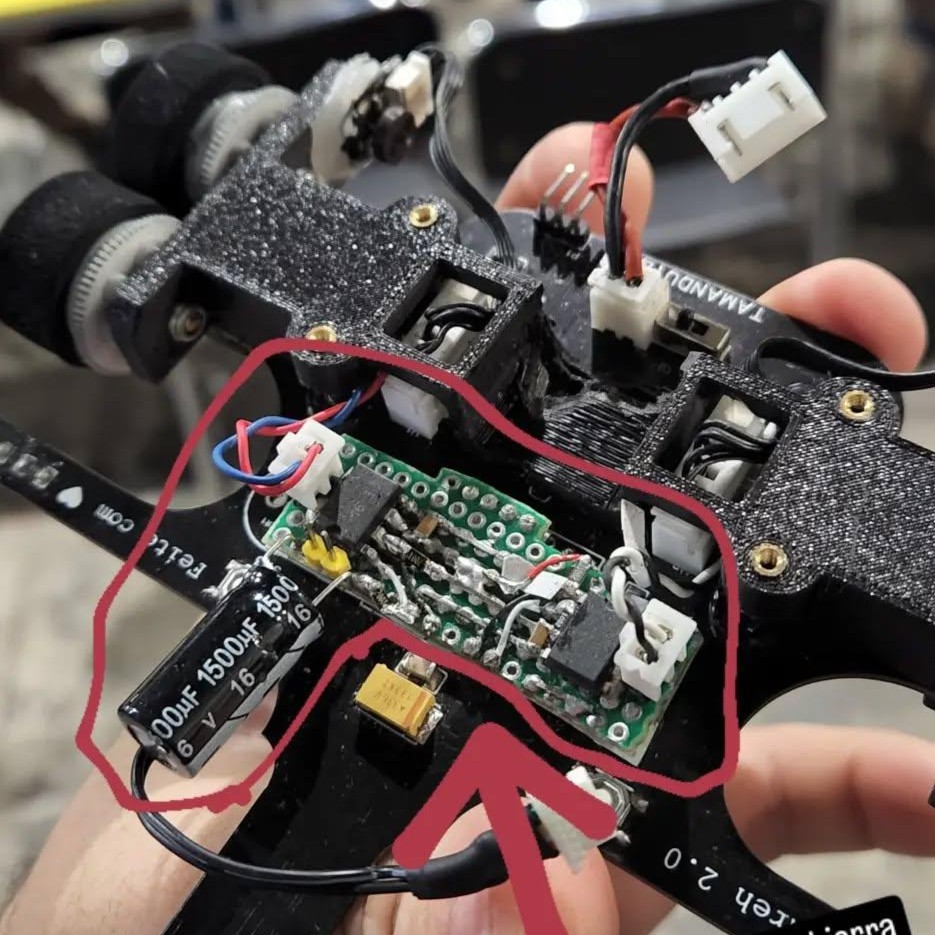
To resolve this issue, we developed a custom H-Bridge module using a perforated board and two more powerful H-Bridge ICs RZ7886. The entire module was hand-soldered, providing a much higher current handling capability. This adaptation allowed us to fully utilize the potential of the coreless motors without system failures:
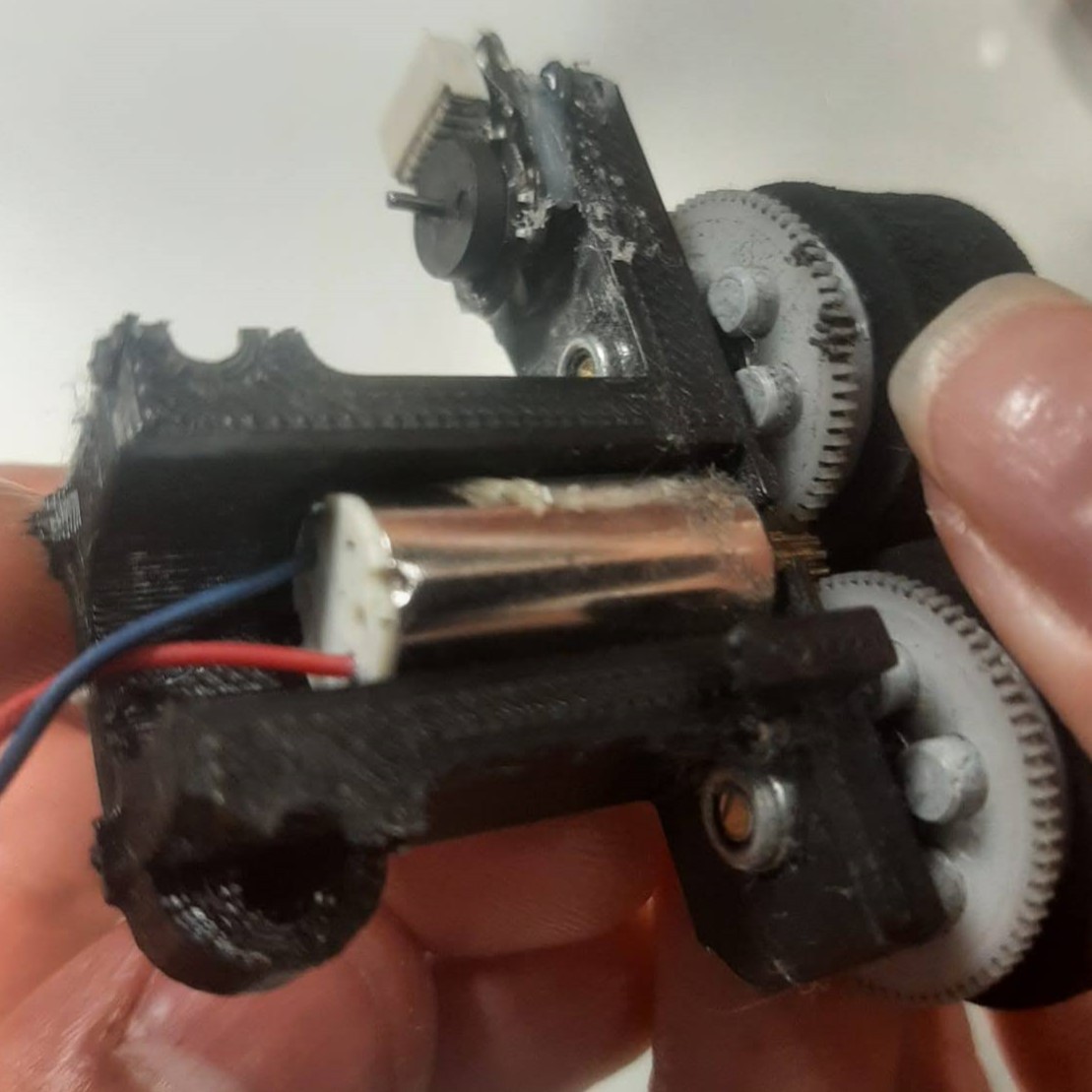
Another crucial step was designing a custom gearbox to integrate the 1020 coreless motors into our system. Since these motors lack pre-attached gearboxes like the N20, we created a reduction system using nylon gears bonded to 3D-printed structures. This approach allowed us to tune gear ratios while maintaining a lightweight design; but we'll a post only about how we design the gerbox.
An additional challenge we faced was how and where to place the encoder on this drivetrain. Our solution was use the pololu encoders, fixed with hot glue, and attached the axis of the wheel gears via an additional gear:
Through these advancements, we successfully transformed Semreh’s drivetrain, achieving superior speed, control, and stability for the brazilian robotics competitions.
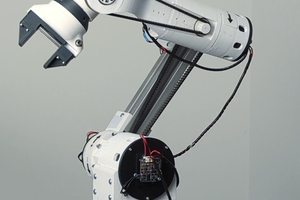
The Semreh robot is 1 of our 3 active projects, alongside Braia and Vespa. Among them, Semreh has been the most prominent to date, showcasing our progress and dedication to innovation. Below is a photo of all three robots:
The Semreh project is currently in its second PCB version, though it has undergone significant external hardware modifications since its inception. Each year, we participate in around 4 to 5 national robotics competitions across Brazil. After each competition, we partially revise the hardware or software to enhance the robot’s performance, ensuring we remain competitive and adaptive.
Below, we highlight the iterations of Semreh’s hardware during key competitions, showcasing the upgrades implemented to improve its capabilities.
The First Fully Stable Version This marked the first version of the PCB that achieved 100% stability in performance. It provided a reliable foundation for the subsequent upgrades.
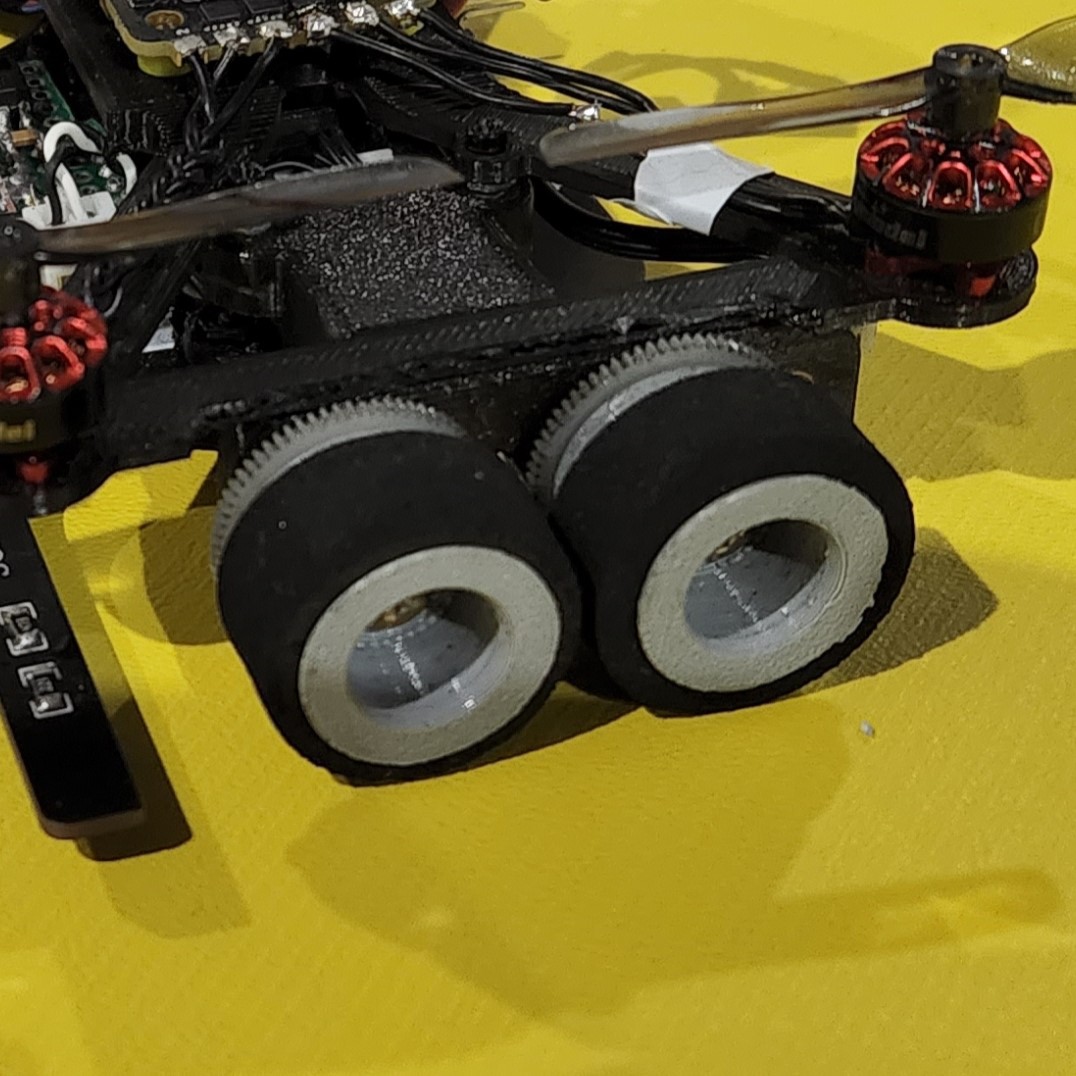
Increased Downforce with Coreless Motor Fans To enhance cornering speed, we added drone coreless motor-powered fans to generate additional downforce. This upgrade significantly improved maneuverability and stability during high-speed turns.
Motor Upgrade and Transmission Adjustments For this competition, we replaced the N20 motors with Coreless 1020 motors for locomotion, transmitting power to two wheels on each side through nylon gears in an 11:70 ratio. However, due to the high current draw required by these motors, our driver was unable to handle the load, forcing us to revert to the N20 motors.
Handmade H-Bridge Motor Driver Implementation For RCX, we developed a new motor driver using a manually assembled H-bridge on a perforated board. This crude yet functional solution allowed us to successfully use the Coreless 1020 motors in the transmission. However, due to issues with the brushless motors used for increasing the normal force, we were unable to achieve optimal performance in this competition.
Major Software Update These competitions marked a significant software overhaul, featuring multiple control fixes for both the Coreless motor drivers and the ESC responsible for regulating the brushless motors used to increase normal force. This update significantly improved the robot’s stability and responsiveness during races.
Through each iteration, Semreh has evolved to meet the demands of the competition landscape. Our constant commitment to improvement and adaptation drives the success of this project, setting a benchmark for our future innovations.







 Petar Crnjak
Petar Crnjak
 Danny FR
Danny FR
 NotBlackMagic
NotBlackMagic
 Anthrobotics
Anthrobotics