 Tamandutech
TamandutechThe Semreh robot is 1 of our 3 active projects, alongside Braia and Vespa. Among them, Semreh has been the most prominent to date, showcasing our progress and dedication to innovation. Below is a photo of all three robots:

The Semreh project is currently in its second PCB version, though it has undergone significant external hardware modifications since its inception. Each year, we participate in around 4 to 5 national robotics competitions across Brazil. After each competition, we partially revise the hardware or software to enhance the robot’s performance, ensuring we remain competitive and adaptive.

Evolution of the Semreh V2
Below, we highlight the iterations of Semreh’s hardware during key competitions, showcasing the upgrades implemented to improve its capabilities.
Copa Pinhão 2023 (Date: June 2023) - No podium
The First Fully Stable Version This marked the first version of the PCB that achieved 100% stability in performance. It provided a reliable foundation for the subsequent upgrades.
IronCup 2024 (Date: February 2024) - 2° Place 🥈
Increased Downforce with Coreless Motor Fans To enhance cornering speed, we added drone coreless motor-powered fans to generate additional downforce. This upgrade significantly improved maneuverability and stability during high-speed turns.

RSM 2024 (Date: April 2024) - 3° Place🥉
Motor Upgrade and Transmission Adjustments For this competition, we replaced the N20 motors with Coreless 1020 motors for locomotion, transmitting power to two wheels on each side through nylon gears in an 11:70 ratio. However, due to the high current draw required by these motors, our driver was unable to handle the load, forcing us to revert to the N20 motors.

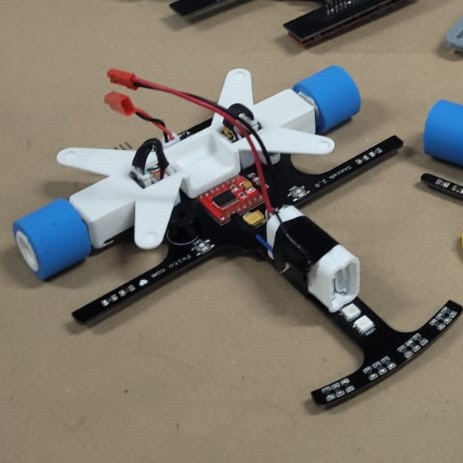
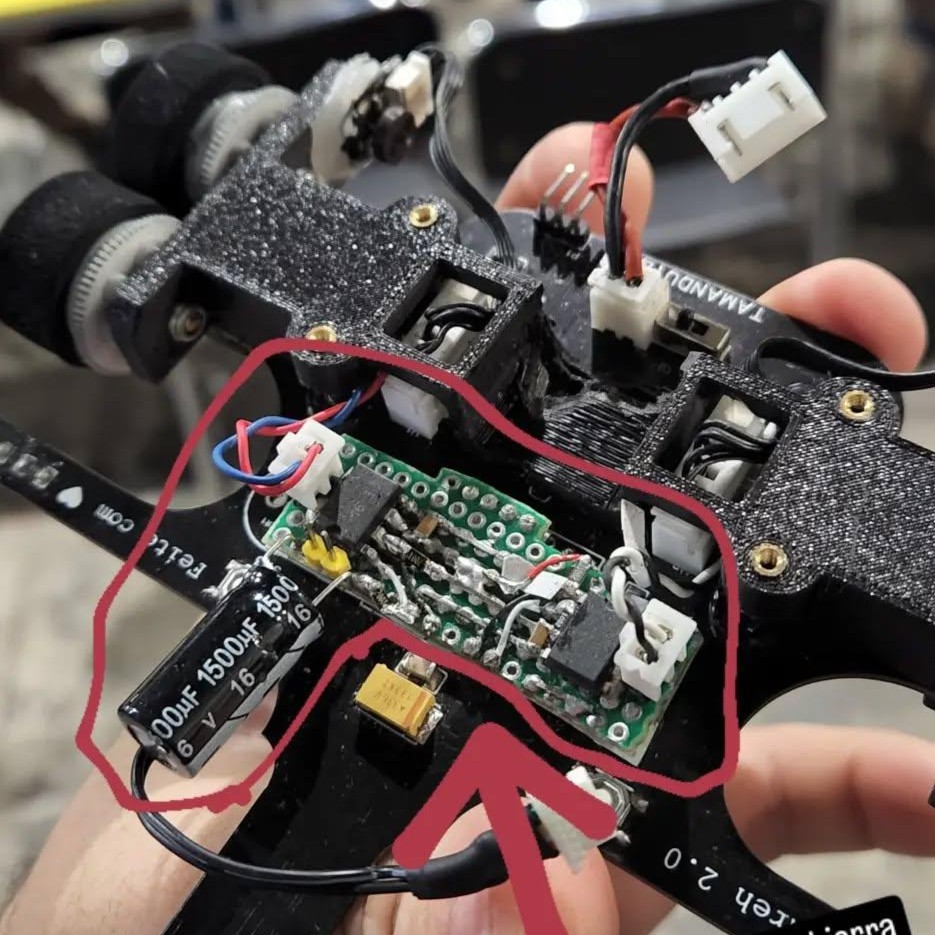
RCX 2025 (Date: July 2025) - No podium
Handmade H-Bridge Motor Driver Implementation For RCX, we developed a new motor driver using a manually assembled H-bridge on a perforated board. This crude yet functional solution allowed us to successfully use the Coreless 1020 motors in the transmission. However, due to issues with the brushless motors used for increasing the normal force, we were unable to achieve optimal performance in this competition.

Copa Pinhão and RoboChallenge 2025 (Date: October2024) - 1° Place🥇
Major Software Update These competitions marked a significant software overhaul, featuring multiple control fixes for both the Coreless motor drivers and the ESC responsible for regulating the brushless motors used to increase normal force. This update significantly improved the robot’s stability and responsiveness during races.

Through each iteration, Semreh has evolved to meet the demands of the competition landscape. Our constant commitment to improvement and adaptation drives the success of this project, setting a benchmark for our future innovations.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.