0%
0%
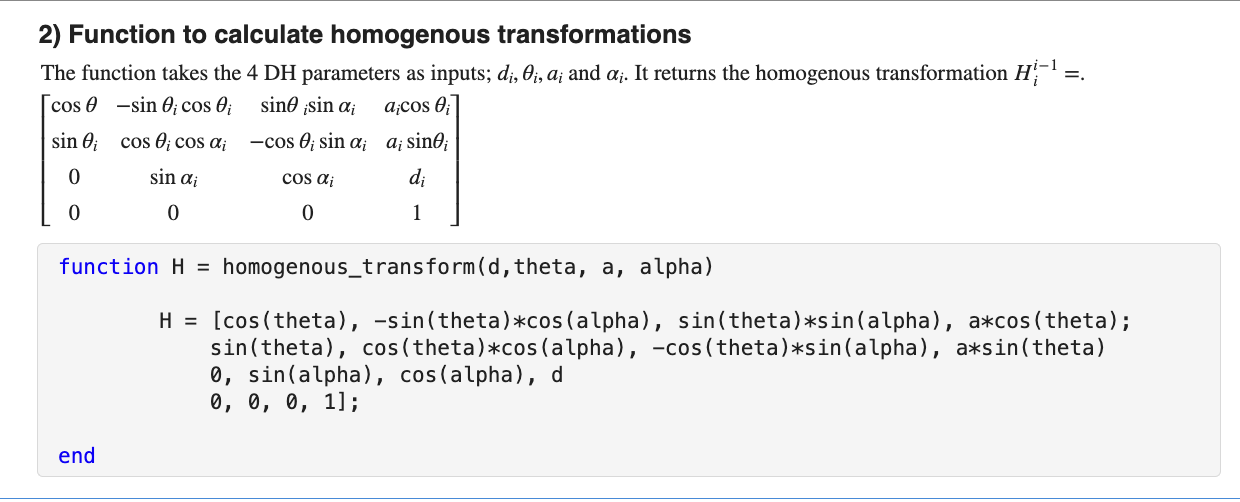
MATLAB: Homogenous Transformations
Creating a MATLAB script to compute homogenous transformations and DH parametrisation for a 3-DOF manipulator
 Jamie Ashton
Jamie AshtonBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Silverwing Industries
Silverwing Industries
 Bruce Land
Bruce Land
 [SF] Pigeon Kicker -- AkA James Ryan
[SF] Pigeon Kicker -- AkA James Ryan
 Michael Wessel
Michael Wessel